尽头式车站列控系统解决方案研究
2023-02-24吴庆鹏史雅男
王 东,高 亮,吴庆鹏,史雅男
尽头式车站一般为大型客运的始发终到站,受铺轨、接触网立柱、车载设备安全防护距离等因素制约,动车组停车标设置位置往往距股道尽头较远。若现场再叠加其他因素,如尽头式车站为CTCS-3等级、车站站房在股道尽头侧、站内未实现电码化等,则相关问题愈加突显。旅客进出站走行距离会相应增加,影响旅客舒适度和满意度;同时为避免旅客上下车人流对冲,在运输组织上需延长列车到达和折返发车的时间间隔,影响动车组利用率,降低了运输效率。为此,本文对管内2处尽头式车站进行深入研究,提出满足运输需求、保障安全的解决方案,为全路同类型情况提供借鉴和参考。
1 规范要求
1.1 尽头式车站应答器设置原则
《列控系统应答器应用原则》(TB 3484—2017)[1]和《列控系统应答器应用技术条件》(Q/CR 769—2020)[2]均对尽头式车站应答器设置进行了规定,下面以图1所示站场为例进行简单说明。

图1 尽头式车站应答器及停车标设置示意
1)在尽头站分别设置A、B、C点应答器组。A点应答器组数据描述停车点一般为出站信号机,对于B点至出站信号机(或调车信号机)的速度描述为15 km/h,将C点应答器的链接反应设置为紧急制动[1]。
2)距尽头式出站信号机150 m处设置B点无源应答器组,其设置及数据描述应满足列车能越过原A点应答器组获得的控制停车点,以15 km/h速度继续前行并到达停车标[2]。
3)股道末端合理位置设置C点绝对停车无源应答器组,该应答器组距滑动挡车器不宜小于35 m,应包含目视行车危险、绝对停车、调车危险等信息包。
1.2 安全保护距离要求
按照《CTCS-2级列控车载设备技术条件》(TB 3529—2018)[3],车载设备站内安全保护距离最小为60 m;CTCS-3级车载在站内停车时,安全防护距离经实时计算获得,大约为30~40 m。
1.3 其他要求
1)安全余量。动车组停车标一般设置在距尽头式出站信号机60 m,并考虑增加一定停车余量的位置;停车余量应包含停车标距车头余量、司机停车误差和测速测距误差,一般取10~15 m。
2)虚拟数据。对于CTCS-3级车站,CTCS-3级车载通过接收无线闭塞中心RBC发送的移动授权控制列车停车,尽头式车站移动授权的终点为尽头出站信号机(CTCS-3级无虚拟数据),该情况相对CTCS-2等级的尽头式车站更加不利;CTCS-2等级的尽头式车站在理论上可以通过B点应答器的虚拟数据控制列车在任何理想位置停车。
2 车站A设计方案
2.1 原设计方案
某尽头式车站A采用CTCS3+ATO列控系统,相关设备位置示意见图2。站房设置在股道尽头侧距站台边缘25 m,滑动挡车器距离固定车挡15 m,固定车挡距离站台边缘15 m。按照要求设置A、B、C点应答器组,其中尽头信号机距离滑动挡车器5 m,C点应答器距滑动挡车器35 m,B点应答器距滑动挡车器150 m,停车标距离尽头信号机72 m。
2.2 新方案
因站房设置在股道的尽头,旅客需沿站台走行进出车站。由图2可知,动车组停车标距站台边缘约107 m,自站房到长编动车组最远车厢门距离约550 m,旅客进站乘车时走行距离远,且上下车旅客在站台形成客流对冲,容易出现聚集拥挤和跌落站台的人身安全风险。为缩短旅客进出站走行距离,方便客运组织,提高旅客乘车舒适度及满意度,考虑对尽头站停车标设置位置进行优化。
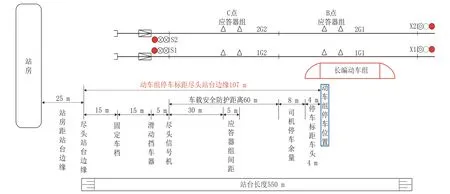
图2 尽头式车站A原相关设备位置示意
2.2.1 尽头信号机位置优化
固定车挡允许车辆撞击速度一般为15~25 km/h。经计算及综合分析,当冒进停车标撞击车挡的速度在10 km/h以下时,车挡允许撞击速度大于列车撞击速度,可仅设置固定式车挡。为取消既有滑动挡车器,只需将动车组停车速度降低至10 km/h即可[4]。按照该思路在紧邻站台边缘设置液压固定式车挡(其自身长度为2 m)。根据液压固定式车挡设置情况,尽头信号机移设至液压固定式车挡前方0.5 m处,并设置尽头式绝缘节。
2.2.2 B点应答器速度优化
距离液压固定式车挡(与尽头信号机位置基本相同)150 m处设置B点应答器组,组间距按5 m设置。为进一步缩短停车标与站台边缘距离,按照让动车组在股道低速前行的思路,将B点应答器组速度优化为10 km/h。进站应答器组(A点应答器组)报文对于B点至液压固定式车挡的速度描述为10 km/h,维持C点应答器组的紧急制动链接反应。
2.2.3 C点应答器组位置优化
按照TB 3484—2017要求,原方案中C点应答器组距滑动挡车器35 m,距尽头信号机30 m。为进一步优化停车标设置位置,缩短停车标与站台边缘距离,通过现场动态试验,特殊情况下动车组到达C点应答器组速度不大于5 km/h,为此确定在距液压固定式车挡27 m处设置C点应答器组,同时C点应答器组间距参考调车防护系统标准按3 m进行优化设置,C点应答器组依然按照规定发送目视行车危险、绝对停车、调车危险等信息包。
2.2.4 B点应答器虚拟数据
为进一步压缩停车余量,将司机停车余量由8 m优化为2 m,即停车时车头距C点应答器组距离为2 m。考虑各局司机操作习惯不同,将停车标距车头距离由原4 m适度放宽至5 m,则停车标距站台边缘距离为2+27+3+2+5=39 m。
受车载设备安全保护距离最大为60 m的制约,只有采用虚拟数据动车组才能停靠在停车标位置。目前车头距尽头信号机的距离为27+3+2=32 m,初步计算虚拟数据为60-32=28 m。考虑测速、测距误差等因素,B点应答器组按配置30 m虚拟数据设置,现场实施时可根据实际适当修改,以控制动车组到达C点应答器组速度不大于5 km/h。另外为满足ATO动车组停车需求,根据停车标位置、B点应答器位置变化,同步移设股道精确定位应答器组。
在车站咽喉区布置维持不变的基础上,经优化后,停车标距站台边缘39 m,见图3,与原设计107 m相比缩短了68 m。

图3 优化后停车标距站台边缘39 m示意
2.3 新方案实施问题及解决措施
新方案在现场实施后,电务持续对各种型号列控车载设备进行跟踪和分析,又发现了2个问题:一是部分CTCS-3级动车组欠标,无法准确停到停车标位置;二是ATO控车时,停车后无法实现自动开车门。
2.3.1 对标问题与RBC软件优化
各种车载设备为保障安全预留的安全余量长度存在差异。通过研究安全余量计算方式,发现与[ETCS-5]信息包描述的应答器安装误差有较大关系。综合考虑车载软件短期内无法优化、现场对精确定位应答器安装位置精度控制高、[CTCS-13](停车位置信息包)中Q_SCALE距离长度的分辨率为10 cm等因素,对RBC软件进行了优化。将CTCS-3级消息中[ETCS-5]信息包对股道内2组精确定位应答器的安装误差参数Q_LOCACC由7 m调整为2 m[5]。调整后车载设备对标问题得到有效解决。
2.3.2 ATO无法自动开门问题与CTC参数优化
新方案中由于B点速度降为10 km/h,列车进入股道对标过程中车速较低,导致列车在股道内运行时间增长。目前CTC判断列车停稳采用的是列车完全进入股道后延时90 s,此为一个经验值,一旦判断列车停稳后,CTC不再给ATO列车更新运行计划,ATO持续60 s未收到运行计划更新,则判定原运行计划无效。车站A实施新方案后,ATO列车自完全进入股道,到运行超过150 s依然未能到达停车标位置,未能停车,进而出现车载判断原计划无效,就会出现无法自动开车门的问题。为此将CTC停车时分适当延长,由原来的90 s改为150 s(根据现场测算),问题得到解决。同时考虑CTC该项改动的影响,对现有运行图进行了稍许优化。
3 车站B设计方案
3.1 原设计方案
某尽头式车站B为既有车站,前期为CTCS-0级区段,为满足动车组接入需要,进行了CTCS-2级改造,增加了列控中心对应答器的控制。因股道前期一直未实施电码化,本次继续维持不变。参照TB 3484—2017标准,在车站B增加了A、B、C点应答器组,其中C点应答器设置距离固定车挡35 m,B点应答器距离固定车挡150 m。因股道长度满足正常停车需求,B点应答器仅作为定位应答器使用(考虑预留其他位置停车需求,工程实施时将原本的单个定位应答器改为双应答器[6])。固定车挡上部设置红灯表示器,处于常态点亮状态。按照该方案设计后,停车标位置设置在距离固定车挡74 m处。尽头式车站B列控改造方案示意见图4。

图4 尽头式车站B列控改造方案示意
3.2 改造方案实施问题与优化
3.2.1 长编动车组接入隐患
原方案现场实施后,动态试验中发现16编组动车组接入股道后,尾部位于线路曲线段25 m,受站台限界和曲线加宽影响,尾端第1、2车厢车门距站台间隙最大处60 cm,容易造成旅客摔伤和行李坠落。为了解决长编动车组停靠和旅客上下列车人身安全隐患等问题,需进一步将停车标向尽头方向移设。鉴于车载防护距离要求,根据各股道实际情况,在B点应答器数据中写入30~50 m长度不等的虚拟数据,并将停车标移设到距离固定车挡40 m位置,实现了动车组向尽头方向前移34 m。
3.2.2 CTCS2-200C动车组无法对标
按照解决长编动车组接入隐患的优化方案,在B点应答器写入虚拟数据,并对停车标进行移设后,现场进行兼容性试验时发现,CTCS2-200C型车载设备在无码条件下接收到B点应答器数据(存在虚拟数据)后,继续维持A点进站应答器数据不更新,无法按照虚拟数据延伸行车许可,进而导致动车组无法运行至停车标就已经控停[7],未能对标。按照TB/T 3529—2018第7.4.4.6条款b)“列车进入到发线时,来自到发线轨道电路信息如果为HU码,则应保持在股道停车的制动模式曲线。如果在到发线接收到允许码,则应根据该信息重新计算MA”的规定,因股道接车方向未实施电码化,CTCS2-200C车载设备在接收B点应答器数据时,因地面无码,所以不更新制动模式曲线,继续使用A点进站应答器数据,维持制动曲线不变,控制动车组在站内停车。通过分析发现,尽头式车站方案若车站股道无码,则CTCS2-200C无法按虚拟数据实现对标。
鉴于车载逻辑进行适应性修改周期相对较长,经过研究制定了以下2个方案。
1)过渡方案。修改列控中心A点进站有源应答器报文,将A点应答器描述的数据终点延长到与B点应答器(含虚拟数据)描述的数据终点一致[8];同时作为防护措施,在A点应答器中将B点应答器丢失的链接反应描述为“常用制动”。该方案实施简单,满足短期过渡使用。
2)最终方案。完成股道内接车方向电码化,并按照尽头式车站应答器运用原则开展标准设计。该方案涉及电码化,需要时间相对较长[9]。
4 结论
1)尽头式车站列控方案需综合考虑。尽头式车站情况复杂,ATP车载设备型号众多,在现场按照尽头式车站方案实施前,设计阶段要充分考虑站房结构、列控等级、各型车载逻辑、各型动车组长度、股道电码化等情况,不满足正常停车时,通过采用B点应答器注入合适长度虚拟数据、优化B点应答器位置列车运行速度等手段,在保障列车运行安全的前提下,满足运输需求。
2)尽头式车站需加强驾驶人员管控。鉴于ATP列控车载设备在调车、目视行车、引导、隔离等模式下,列车的运行速度不允许超过40 km/h,为规避尽头式车站冲撞风险,需加强对驾驶人员的管理和控制。
3)针对尽头式车站遇到的问题,从电务信号角度提出2个建议:一是股道接车方向实现电码化;二是尽头式车站不宜采用CTCS-3列控等级,宜采用CTCS-2等级[10]。