基于STM32的按摩椅控制系统硬件电路设计*
2023-02-24刘灿华何绍健
刘灿华,杨 廉,何绍健
(宁德职业技术学院新能源与智能制造学院,福建福安 355000)
0 引言
进入21世纪以来,人们越来越关注健康话题。而随着人们工作压力增加,自由活动的时间减少,人们的户外运动与锻炼方式越来越少,居家的健康养生方式越来越得到人们的推崇。同时,近些年共享模式的兴起,电动按摩椅作为一种简易且健康的养生用具,目前已经成为一种流行方式[1-2]。由相关资料显示,2019年电动按摩椅的搜索指数达到了1941,排在保健类电器搜索指数的第2位。2020年上半年线上的销售额同比增长了68%,达到了27.7亿元[3]。足以说明疫情笼罩之下,人们对电动按摩椅的需求攀升。
目前国内外市面上常见的电动按摩椅多是围绕相对简单的8位微处理器进行设计,功能相对单一,同时,8位微处理器所能提供的输入输出引脚相对较少,逐渐难以满足整个电动按摩椅的功能需求。因此,现有的电动按摩椅控制系统多采用多个8位微处理器进行组合控制,这也造成了微处理器之间通讯困难、控制命令传递延迟等问题,对电动按摩椅使用过程中的舒适性造成一定的影响[4-5]。目前,电动按摩椅的各种附加功能不断增加,但制约电动按摩椅发展的一个重要瓶颈为其舒适性无法提升的问题,而影响电动按摩椅舒适性的一个关键因素即是按摩过程的指令延迟时间。STM32微处理器拥有功能丰富、存储容量大、引脚数量多等优良特性,能够满足愈来愈丰富的电动按摩椅的功能需求[6-7]。因此,本文以STM32微处理器为处理核心,结合电动按摩椅的基本功能设计硬件电路,实现电动按摩椅的各种基本动作需求。同时,通过STM32微处理器快速的指令处理速度与取消传统分离式控制的方案,实现控制指令实时传递到相应的控制结构,降低延迟时间,提升电动按摩椅的舒适性。
1 系统整体方案
目前市面上的电动按摩椅功能各不相同,归纳总结市场上高、中、低端各个层次的的电动按摩椅,其基本特征均是具备揉捏、捶打、行走、推杆、气囊。故本文依据STM32微处理器设计的电动按摩椅应具备以上这些功能的同时预留资源用于后续升级,所设计的电动按摩椅电路系统整体控制方案如图1所示。其中,电源模块的输入为由开关电源提供的24 V直流电,因所使用到的STM32微处理器、手控器及气泵等期间需要的电源分别为3.3 V、5 V及12 V的电压,因此电源模块的人物是将输入的24 V电压转化为以上3种电压输出。

图1 电动按摩椅电路系统整体方案
手控器任务相对简单,主要是采集按键状态,并将所得到的操作发送为微处理器。部分电动按摩椅具有显示功能,因此需要将微处理器处理的结果反馈给手控器进行显示。蓝牙功能主要用于音乐播放,目前的蓝牙模块相对成熟且价格低廉,因此此处选取典型的蓝牙模块进行使用即可。机芯部分是整个电动按摩椅的关键机构[8],机芯的驱动电路主要是通过驱动3个有刷直流电机实现电动按摩椅的揉捏、捶打及行走功能[9-11],同时,配合一些行程开关即可将各个电机运行过程的位置信息传递给STM32微处理器模块。推杆驱动电路包括背部驱动以及腿部驱动,所使用到的电机也是直流有刷电机。由于推杆机构运行到极限位置时,电机电流较大,因此此处一般不添加行程开关,而是通过检测电流的大小来判断是否到达极限位置。气囊驱动电路主要是按照STM32微处理器的指令要求,通过驱动一个气泵并结合一些开关实现肩部、手臂、腿部等部位的气囊按摩[12]。
2 硬件电路设计
2.1 机芯电机驱动电路
机芯驱动电路主要包含揉捏、捶打与行走3个部分,其中揉捏与捶打功能类似,主要按照STM32的指令要求,驱动电机进行进行速度可调的单向运动即可,功能相对单一。因此,此处仅以揉捏部分进行说明,设计的驱动电路如图2所示,其中J1接口连接一个直流有刷电机,J1的3号引脚直接接入24 V电源,另一端通过通过PWM3信号驱动Q1 MOS管实现通断及电机速度的调节。直流有刷电机的速度可用公式表示为:v=vmax×D(其中,vmax为电机的最大速度,D为PWM3处施加的占空比)。
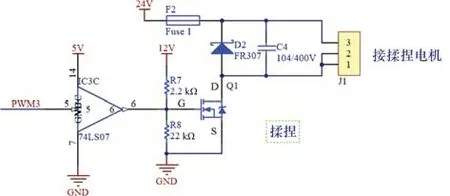
图2 机芯揉捏驱动电路
2.2 行走电机驱动电路
行走部分虽然使用的也是直流有刷电机,但与揉捏捶打部分不同的是需要实现正反转以及机芯部分的上下行走功能,因此电路部分有所不同,具体驱动电路如图3所示。

图3 机芯行走驱动电路
STM32微处理器输出的高电平电压仅为3.3 V,无法直接驱动一个24 V电机或者继电器,本文先将微处理器输出的信号引入一个公共端连接12 V电平的达林顿管输入引脚,从而实现12 V电平的输出与否。而输出引脚接入到K5继电器中,当管脚16输出为0 V时,继电器接通,J13的1号引脚输出24 V。当管脚16输出为12 V时,继电器断开,J13的1号引脚输出为0 V。因此,通过此设计即可实现微处理器的高低电平输出控制直流有刷电平的24 V电平输入与否。
在实现了WALK1与WALK2引脚控制电机输入端24 V与0 V输入后,只需合理配置WALK1与WALK2即可实现电机的正反转,具体如表1所示。而电机的速度控制原理也与前文揉捏与捶打电机速度控制相同,只需要在输入端控制好占空比即可实现速度控制。
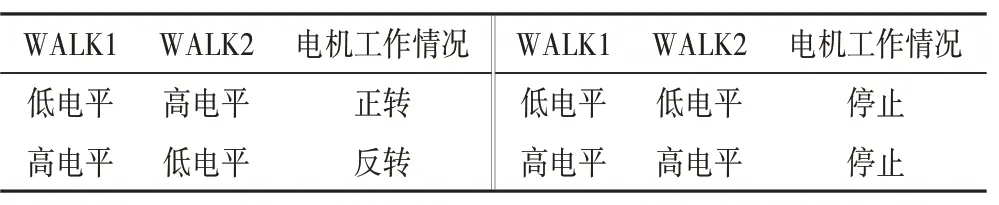
表1 输入信号与行走电机工作情况表
2.3 推杆驱动电路
推杆驱动部分主要包含腿部推杆与背部推杆,其所使用的电机也主要是有刷直流电机。并且因推杆工作过程需要完成伸出与收回的功能,故需能够实现正转与反转功能,因此驱动部分与行走电机驱动电路类似。
与行走电机不同的是,推杆电机的极限位置检测不是通过限位开关实现,而是通过检测电流大小实现。具体原因是当推杆在伸出或者缩回过程电流相对较小,而到达极限位置时,电机无法转动,此时的电流快速增大。故可设计一块电流大小检测电路,将电机运行过程的电流值反馈到微处理器的模数转化引脚,进而判定是否到达极限位置。如图4所示,无论推杆电机处于伸出或者收回状态,其实时电流均通过采样电阻R22流入GND,但此处获取的电压值相对较小,若直接输入到微处理器的模数引脚,将导致所获取的转化值较低。因此在此处添加一个放大电路,放大倍数为1+R38/R21,R38与R21的电阻值可依据实际测试结果适当调整。
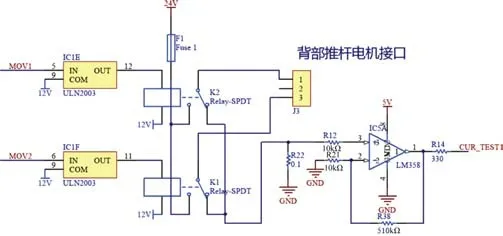
图4 推杆电机驱动电路图
2.4 气囊驱动电路
气囊驱动电路的功能主要是通过控制气泵的工作与否实现气囊的充气与放气。具体驱动电路如图5所示。气泵的一端已与GND连接,另一端连J17的3号引脚,J17的1号引脚连接24 V。PUMP1信号通过一个三极管Q33控制继电器K8吸合与否,当K8吸合,对应24的J17-1号引脚与J17-3号引脚接通,气泵开始工作。相反,继电器断开时,J17-1与J17-3引脚断开,气泵停止工作。

图5 气囊驱动电路
2.5 通讯电路
电动按摩椅中通讯电路主要包含STM32微处理器与手控器通讯及STM32微处理器通过蓝牙与手机等设备进行的通讯。这两种通讯均是通过串口进行通讯,原理基本类似,故本文取微处理器与手控器之间的通讯电路进行说明,具体电路如图6所示。其中,J21端口用于与手控器相连接,手控器可以将接收来自微处理器的并行数据字符转换为连续的串行数据流发送出去,同时可将接收的串行数据流转换为并行的数据字符供给微处理器。串口通信最重要的参数是波特率、数据位、停止位和奇偶校验,因此,对于手控器与微处理器两个进行通信的端口,在两端设置相同的参数即可进行按键、限位信息、按摩手法等信息的交互。
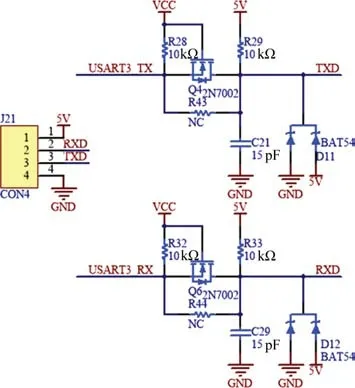
图6 串口通讯电路
2.6 STM32微处理器模块
STM32微处理器模块是整个电动按摩椅控制系统的核心,所有的控制命令均通过其发出,同时也需要接收所有的反馈信号。具体的模块如图7所示。其中,J4为程序下载与调试端口,Y1、C15与C17组成了晶振模块,R27、C20与NRST引脚构成了上复位电路。其余引脚用于发送驱动信号、接收位置信号、串口通讯、A/D采样等功能。

图7 微处理器模块电路
2.7 电源模块电路
电源模块是整个电动按摩椅控制系统工作的基础。由于整个控制系统包含的器件众多,而各器件工作所需要的电源类型各不相同,比如气泵工作电压为24 V,继电器工作电压为12 V,运算放大器工作电压为5 V,STM32未处理器为3.3 V,因此需要对开关电源输出的24 V电压进行转化,具体如图8所示。J22接开关电源的24 V输出,此电压主要用于气泵工作。24 V电压经过7812芯片转化为12 V电压,主要用于继电器工作。12 V电压经过7805芯片转化为5 V电压,主要用于LM358及74LS07等芯片供电。最后,5 V电压经过一个AMS1117芯片转为为3.3 V电压,主要用于STM32微处理器的供电与模数转化的参考电压。

图8 电源模块电路
3 测试验证
依据电路原理图,选择合适的电子元器件设计PCB,如图9所示。并将其安装到某电动按摩椅公司生产的按摩椅中进行测试。依据电动按摩椅的基本要求,进行揉捏电机测试、捶打电机测试、行走电机上下运行测试、气泵运行测试、串口通讯测试、电源模块电压测试等项目,测试结果表明各模块均表现稳定。

图9 电动按摩椅系统硬件电路PCB图
在功能实现的前提条件下,需要控制指令的延迟时间进行测试与比较。因此,本文选取传统主板与机芯板分离式控制的电路板与本研究设计的电路板进行比较。主要测试项目为机芯上的揉捏、捶打及行走电机从控制指令发出到相应电机开始转动的延迟时间进行比较。测试结果如表2所示,可以发现本方案在实现传统电动按摩椅功能的同时,指令延迟时间减少了50%左右。

表2 控制指令延迟时间对比s
4 结束语
本文基于目前市面上电动按摩椅的要求,结合STM32微处理器设计了电动按摩椅的硬件控制电路系统。与传统的IO引脚少、数据处理能力差、功能拓展性低的8位微处理器为核心的分离式控制方案相比,本文在保留了传统电动按摩椅方案揉捏、捶打、行走、气泵推杆等的基础上,通过一体式的电路板设计,将决定电动按摩椅舒适性的机芯控制集中到主控板上。经过测试,所采用的方案降低了机芯揉捏、捶打与行走机构的控制指令传递延迟时间,实现了按摩过程的舒适性提升。并且预留了Wi Fi、语音、触摸等功能,若后续有连接入智能家居系统需求,可在此基础上进行设计。
