基于LED背景墙的电影虚拟化制作中影像分辨率影响因素与控制方式探究
2023-02-19王潇珏赵建军
王潇珏 赵建军 陈 军
北京电影学院影视技术系,北京 100088
1 引言
电影虚拟化制作 (Virtual Movie Making 或Movie Virtual Production)技术发展迅速,为电影制作领域带来了创新性突破。近年来,随着计算机图形学、实时渲染技术以及LED 显示等技术的不断发展,基于LED 背景墙的电影虚拟化制作 (简称LED 虚拟化制作)引起了影视行业从业者的广泛关注并付诸实践。LED 背景墙在拍摄现场可直接显示与摄影机运动所匹配的虚拟背景,摄影机拍摄演员在LED 背景墙前的表演便可直接获得合成影像,即摄影机内视效,替代了在拍摄现场使用传统蓝/绿幕,再经由后期进行合成的形式。如今,高分辨率、高帧率、高动态范围等高新技术格式标准越来越成为电影成片的主流技术标准,而这一技术在为现场拍摄带来沉浸式体验的同时,也导致了 “以数字化的方式直接采集数字化内容”,为高质量影像的制作带来了新的挑战。
具体来说,基于LED 背景墙的电影虚拟化制作,一方面需要以离散的数字化方式采集离散的数字化内容,另一方面拍摄现场还增加了虚拟化制作的诸多前置技术环节,从虚拟场景的渲染、显示到被拍摄与采集的每一环节都涉及影像信号的处理与传递,并影响着最终拍摄输出的影像质量,这使得基于LED 背景墙的电影虚拟化制作对影像质量的控制将是基于全过程的,也更为复杂。
以分辨率这一技术指标为例,在虚拟化制作中,如果LED 背景墙显示的影像分辨率低,那么即便摄影机设置了4K 分辨率拍摄,也会导致最终摄影机拍摄成像的背景模糊不清、丢失细节。本文正是针对这一命题,重点围绕基于LED 背景墙的电影虚拟化制作在现场制作阶段中,影像分辨率这一主要技术指标的影响因素进行分析与探究,并梳理虚拟化制作流程中控制分辨率的主要方法。
2 摄影机内视效及LED 虚拟化制作中影像质量的挑战
2.1 LED虚拟化制作核心环节与摄影机内视效
从制作环节与技术流程上看,基于LED 背景墙的电影虚拟化制作可以大致分为前期筹备与现场拍摄两个阶段。首先,这一技术重在后期前置,需要视效团队在前期筹备阶段便完成虚拟场景的设计与制作工作,并将其投入现场拍摄。而现场拍摄阶段则是基于LED 背景墙的电影虚拟化制作最重要的技术应用阶段,其核心环节与技术要点如图1 所示,设备选择与技术操作都将对成片质量产生直接影响。
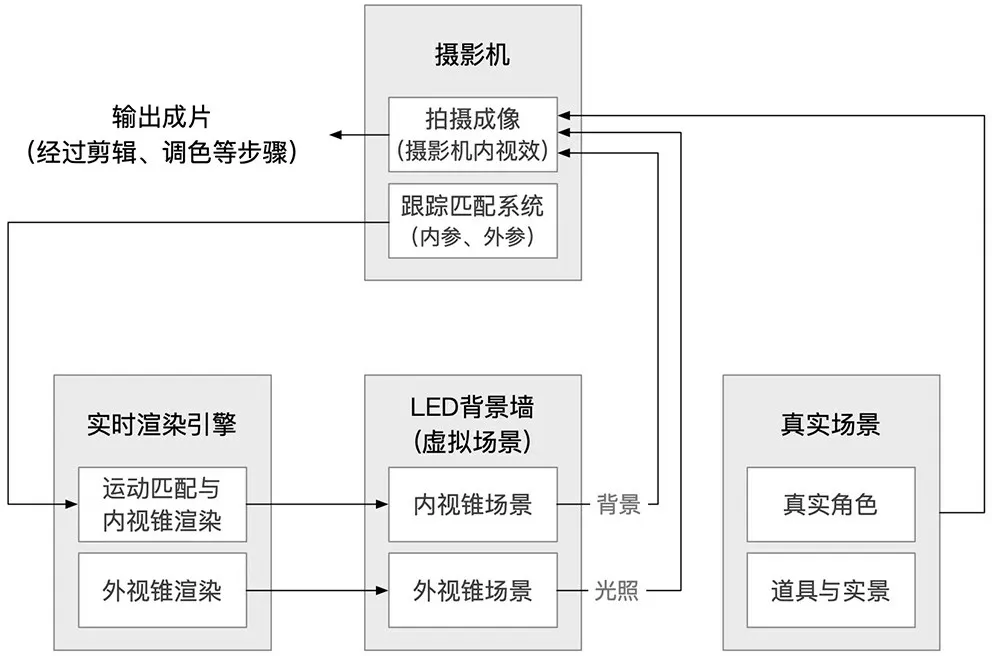
图1 LED虚拟化制作核心流程
如图1 所示,由摄影机直接拍摄真实场景与LED 背景墙,便可获得前景为演员与布景、背景为LED 背景墙实时显示的虚拟场景的 “合成”影像,即摄影机内视效 (In-camera VFX),在当前的典型制作流程中,摄影机内视效的合成拍摄结果即可作为成片直接输出。
具体而言,摄影机内视效的实现主要是由实时渲染、摄影机跟踪匹配以及LED 背景墙显示三部分互相联动、协同配合完成的。
2.1.1 实时渲染
实时渲染是通过实时渲染引擎以及相应的渲染群集等软硬件技术,将虚拟的场景实时地输出给LED 背景墙显示终端。在条件允许的情况下,采用多机同步渲染的方式,能够有效提升渲染效率。
由于摄影机视场 (Field of View,FOV)覆盖LED 背景墙的范围有限,为了更有效地实现摄影机内视效,在实际拍摄中只需对摄影机视场范围内的虚拟场景进行更精细的渲染即可。渲染场景根据是否在摄影机的拍摄范围内,可分为内视锥 (Inner Frustum)渲染与外视锥 (Outer Frustum)渲染,如图2所示。其中,内视锥渲染主要用于实现摄影机内视效,提供了整个摄影机视场的背景画面,内视锥场景可跟随摄影机产生相应的运动、透视、景深等实时变化效果。而外视锥的渲染范围是除内视锥以外的部分,这部分虽然在实际拍摄时一般不会产生额外的交互效果,但在提供视觉沉浸感与逼真的光照效果方面有着重要作用。
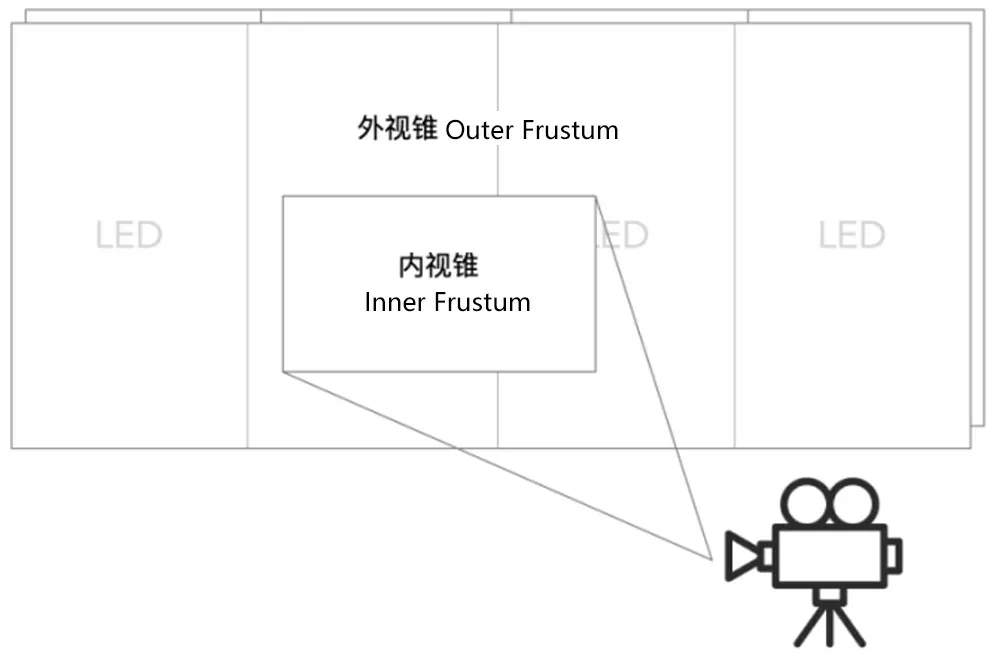
图2 外视锥渲染和内视锥渲染
2.1.2 摄影机跟踪匹配
跟踪与匹配部分通过摄影机跟踪技术实时地捕获真实摄影机的运动、姿态 (外参)与焦距、焦点等信息(内参),并将其传输至渲染引擎,再由引擎匹配给虚拟场景中的虚拟摄影机并渲染输出相应的画面,从而在LED 背景墙上实时呈现出具有与真实摄影机参数一致、透视匹配的内视锥场景。
2.1.3 LED 背景墙显示
LED 显示部分则是通过LED 背景墙及配套的视频信号处理系统,实现虚拟场景的实时显示。LED 背景墙以每个封装了三基色发光二极管的LED灯珠作为最小可控的独立发光单元,并采用模块化装配方式,将灯珠组成的像素阵列构成LED 显示模组,再自定义拼装形成LED 背景墙[1]。拍摄现场为了适应摄影机运动,往往将LED 背景墙以半圆形、弧形或矩形环绕在拍摄区域周围,并根据需要加装顶屏。
2.2 LED虚拟化制作影响影像质量的主要环节
对比摄影机拍摄实景的过程,在基于LED 背景墙的电影虚拟化制作中还叠加了诸多前置处理环节。如图3所示,按照实现摄影机内视效的技术流程,整个虚拟场景从开始渲染到作为虚拟背景被摄影机拍摄获得“合成”的影像,可大致分为LED 显示与摄影机拍摄两大阶段。其中,LED 显示阶段又可以依次细化为实时渲染、视频信号处理与LED 背景墙显示三个主要环节。由于整个过程从影像信号传递的角度可以被视为线性的传输过程,每个环节都涉及影像的输入与输出,故而每个环节的软硬件条件及相关技术参数都将影响并制约最终摄影机拍摄获得的影像质量。

图3 LED虚拟化制作影响影像质量的主要环节
由于目前业内对数字摄影机拍摄已掌握了成熟的影像控制方法,因此本项目将着重研究LED 显示阶段的控制流程与方法。就整体而言,我们可以结合“短板效应”大致遵循这样一个准则,即上述的任何一个技术环节如果在硬件条件或技术参数设置中“造成了”该链路的最小值,那么它也将成为影响与制约最终拍摄获得影像质量的主要因素。
3 影像分辨率及LED 虚拟化制作各环节的分辨率概念
3.1 影像分辨率概念
分辨率是评估影像质量的核心技术指标之一,通常用来描述影像的细节分辨能力。一般而言,当影像的画幅或面积相同时,分辨率越大,其所能描述的细节越丰富,给人带来的主观视觉清晰感也越强。在以离散化为主要特征的数字时代,像素作为描述影像的最小单位,记录着独立的亮度、色度等属性,并按照一定的规则排列,从而构成视觉上具有空间连续感的影像。因此,从基本概念来讲,影像分辨率即其横向像素数与纵向像素数的乘积,也相当于“像素分辨率”(图4)。
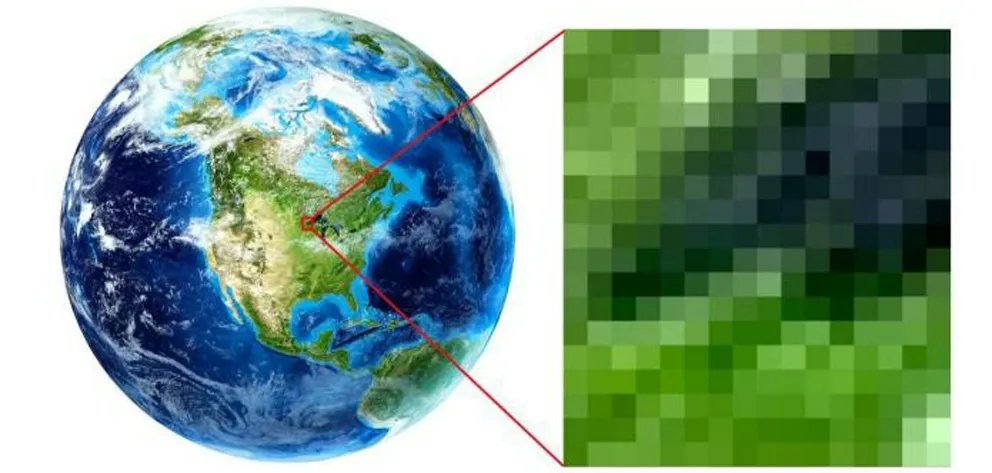
图4 像素与分辨率示意
3.2 LED虚拟化制作各环节的分辨率概念
在基于LED 背景墙的电影虚拟化制作流程中,因涉及对影像的采集、传输、处理、显示等不同技术环节,像素与分辨率又有着不同的表现形式(图5)。
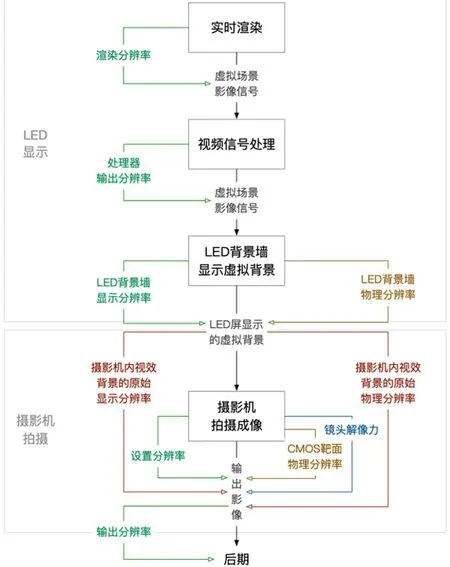
图5 LED虚拟化制作各环节的分辨率概念
3.2.1 实时渲染
在实时渲染环节,引擎将虚拟场景按照LED 背景墙的显示需求渲染出相应规格的二维影像,并将信号输出至下一处理环节。影像分辨率在这一过程中主要体现为 “渲染分辨率”,即渲染时所设定的、需要输出影像的横向像素数和纵向像素数乘积。
3.2.2 视频信号处理
视频信号处理环节通过接收引擎渲染的影像信号,执行相应技术操作后,输出信号至下一个处理环节。此阶段的分辨率体现为 “处理器输出分辨率”,即输出影像时所设定的横向像素数和纵向像素数乘积。与输入影像信号不同的是,在视频信号处理环节可以设定高于或低于输入影像分辨率的数值,以在处理过程中对影像进行裁切或上下变换处理。
3.2.3 LED 背景墙显示
LED 背景墙在接收影像信号后将影像显示出来,这一环节像素和分辨率主要表现为LED 背景墙的“显示分辨率”与“物理分辨率”。
首先,由于传输的影像本身可以独立于显示设备而存在,因此在显示影像时,可以设定影像在概念上横向、纵向有多少个像素单位,其总像素数即“显示分辨率”。由于LED 背景墙在显示时分为内外视锥两个部分,因此 “显示分辨率”也可以具体划分为“外视锥的显示分辨率”与 “内视锥的显示分辨率”。其中外视锥的显示分辨率即“处理器输出分辨率”,而内视锥的显示分辨率则由内视锥的实时面积和视频处理器规定的像素密度决定。
第二,由于影像需要依赖LED 背景墙显示,从技术实现上看,LED 背景墙的最小物理单位是独立的RGB三基色LED 灯珠,如图6所示,因此LED背景墙的灯珠像素总数构成了背景墙的 “物理分辨率”,也是该LED 背景墙在显示影像时所能支持的最高“显示分辨率”。同样地,背景墙的“物理分辨率”也可以划分为“外视锥的物理分辨率”和 “内视锥的物理分辨率”。外视锥的物理分辨率相当于整个背景墙的物理像素总数;内视锥的物理分辨率则相当于内视锥影像覆盖的LED 背景墙面积内横向的物理像素数与纵向的物理像素数乘积。
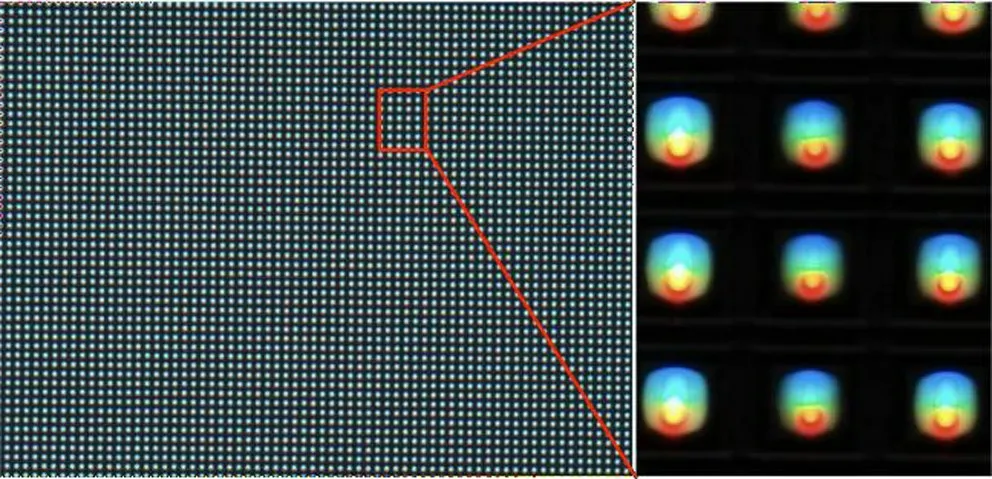
图6 三基色LED显示屏像素 (SMD RGB灯珠)
3.2.4 摄影机拍摄成像
摄影机成像环节则较为复杂,需要摄影机拍摄前景的演员表演与LED 背景墙显示的虚拟背景获得摄影机内视效的合成影像,其分辨率体现在摄影机的镜头解像力、CMOS靶面的物理分辨率、拍摄时的设置分辨率,以及摄影机机内视效背景的原始显示分辨率与原始物理分辨率五个方面。
其中,镜头解像力又称解析力,是描述摄影机光学镜头分辨被摄物细节的能力。CMOS靶面的物理分辨率是指摄影机CMOS图像传感器靶面上横向和纵向物理成像单元 (物理像素)的总数。拍摄时的“设置分辨率”即摄影机在拍摄时所设定的输出影像的横向像素数和纵向像素数乘积。
摄影机内视效的背景则是LED 背景墙内视锥经由摄影机拍摄后所形成的影像,其原始显示分辨率相当于LED 背景墙的 “内视锥显示分辨率”,其原始物理分辨率则相当于LED 背景墙的“内视锥物理分辨率”。
4 LED虚拟化制作各环节对影像分辨率的影响因素与控制方式
4.1 实时渲染环节
实时渲染引擎的主要任务包括渲染并输出支持LED 背景墙显示的虚拟场景视频影像。这一过程中针对影像的渲染分辨率及相关技术参数配置,将直接影响到后续LED 背景墙显示乃至摄影机拍摄的影像质量。以Unreal Engine 4引擎为例,其渲染与输出面向LED 背景墙的影像主要通过nDisplay系统实现,其技术原理如图7所示。这是一个基于GPU专业显卡的实时渲染分布系统,主要用于支持实时渲染影像在以LED 背景墙为代表的大型多屏显示设备上进行显示,具体功能包括影像渲染与缩放、渲染任务分发、实时性与跨屏同步等,目标是尽可能在更短的时间内渲染高分辨率影像[2]。

图7 nDisplay主要技术原理
对于实时渲染环节输出影像分辨率,一方面受虚拟场景的模型及材质贴图本身的分辨率影响,另一方面在经由nDisplay执行渲染输出时还受制于渲染的硬件设备与配置参数,包括渲染分辨率的配置,运动模糊、抗锯齿等后处理视效。基于目前的实时性要求,渲染输出的影像应至少保证60FPS的帧速率,即单帧画面的渲染效率在16毫秒以内。综合来看,各要素与其所能支持输出的最大渲染分辨率关系如表1所示。
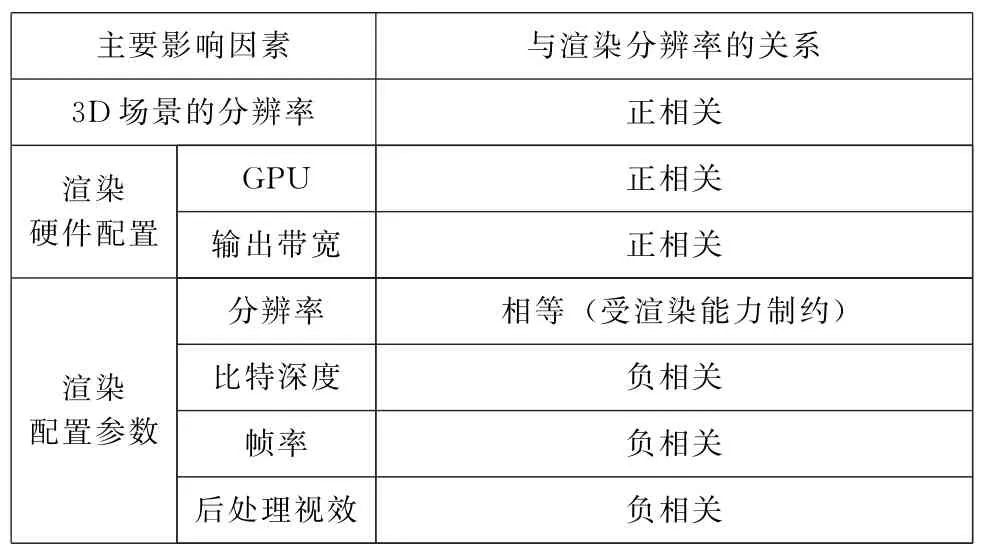
表1 主要影响因素与渲染分辨率的关系
目前,单个GPU n Display 视口在渲染中所支持的分辨率上限可达UHD (3840×2160)。因此在分配各视口的输出分辨率参数时,一方面尽可能直接引用LED 背景墙的形状、大小及其物理分辨率,以避免缩放;另一方面可以根据LED 显示屏数量与每个渲染群集节点的渲染能力,合理分配渲染视口及其分辨率。
4.2 LED视频信号处理
为了支持多屏拼接的大型LED 背景墙,在完成虚拟场景的实时渲染后,视频信号还需要经由LED视频处理器及配套的数据分发单元转换为支持LED背景墙显示的规格,并完成视频信号分发、信号同步拼接等步骤。目前国内外较主流的LED 视频处理器品牌有Brompton、诺瓦等 (图8),而随着LED显示的配套技术发展,视频处理器可提供的影像处理功能也越发丰富,包括缩放、降噪、防抖、图像增强等。

图8 Brompton Tessera SX40 Tessera XD① (上)诺瓦V1260视频控制器 (含4K 信号发送)② (下)
LED 视频处理器的相关性能以及对输入影像信号的处理操作、参数配置,都会影响其输出分辨率,并影响到LED 背景墙所显示的影像质量。主流LED 视频处理器中,相关硬件与参数配置对输出分辨率影响如表2所示。

表2 主要影响因素与输出分辨率的关系
目前的主流LED 视频处理器每台能够支持输出的单像素为每通道最高8Bit位深,且最大带载支持的分辨率能够达到4K 甚至8K,帧率在支持最大60Hz输入的基础上通过处理器插帧算法实现120Hz乃至240 Hz的输出。因此在进行视频处理器参数配置时,一般按照可支持的最大参数进行配置 (8Bit/4K/60 Hz)即可。应确保视频处理器的硬件性能能够支持LED 背景墙的物理分辨率。这需要在购置与安装视频处理器时,确保输出端口最大带载(总和)≥帧率×LED 背景墙的物理分辨率,使得单帧输出影像在不影响帧率同步的前提下实现输出分辨率最大化。
4.3 LED背景墙显示环节
在影像信号经由LED 视频处理器及数据分发单元对视频信号进行转换与分发处理后,LED 背景墙最终支持将虚拟场景呈现出来以供拍摄现场作为虚拟背景进行直接拍摄。整个过程中影像分辨率主要体现为LED 背景墙的“显示分辨率”与“物理分辨率”,因此这一环节对影像分辨率的控制,主要通过研究这两部分的影响因素得以实现。
第一,LED 背景墙的显示分辨率由输入影像,也即“处理器输出分辨率”决定,显示分辨率决定了LED 显示影像的清晰程度,但其分辨率大小受制于LED 背景墙的物理分辨率,无法超过这一上限显示更清晰的影像。
第二,LED 背景墙的物理分辨率决定了可以支持显示的影像清晰度上限,但其本身主要与LED 显示屏的点间距 (Pixel pitch)等指标有着直接的关联。点间距通常以毫米为单位,是指箱体内被封装的独立LED 像素灯珠中心点之间的最小距离[3]。当前应用于电影虚拟化制作的LED 背景墙普遍采用规则排布的小间距LED 灯珠,因此每个像素与相邻像素横向、纵向的像素间距都是相等且固定的数值,即点间距,如图9所示。
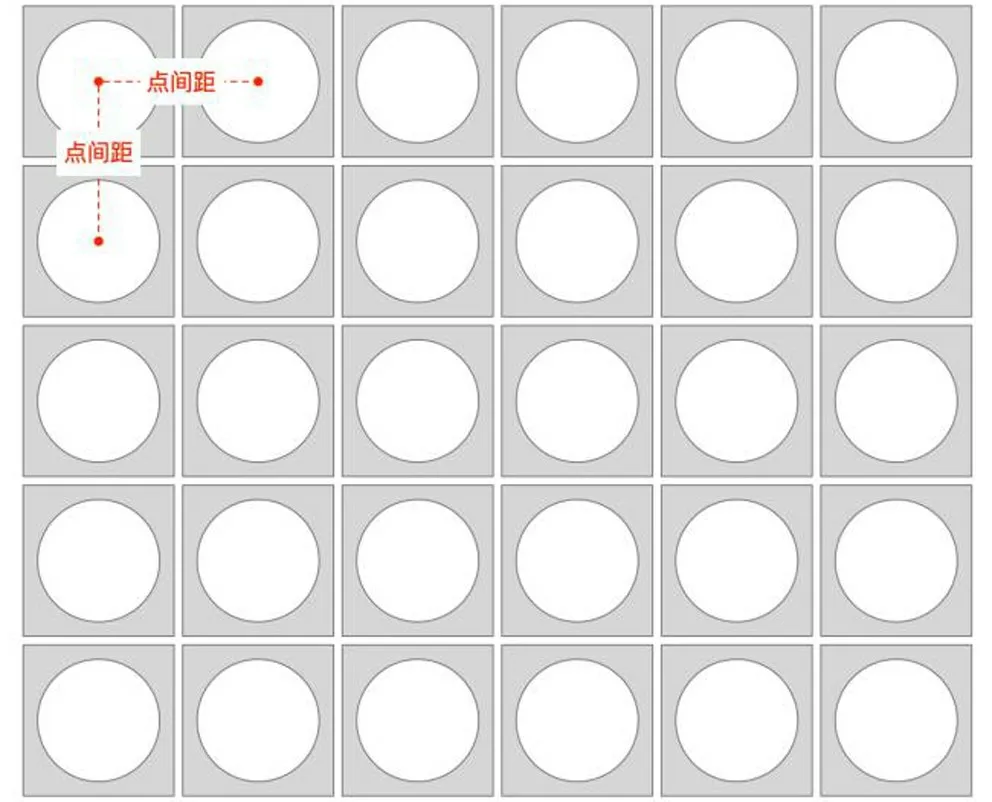
图9 灯珠像素排布方式与点间距的关系
一般来说,点间距越小像素密度就越高,在相同面积的LED 屏幕中便可以支持更高的显示分辨率,LED 屏幕显示的影像便更清晰。目前,市场上常见的小间距LED 屏幕主要指P4以下的产品,包括P4、P3.5、P3、P2.5、P2、P1.6等,例如雷迪奥BP系列LED 显示屏包括BP2与BP3两种型号,其点间距分别为2.84mm 和3.91mm③。具体而言,LED 背景墙的物理分辨率与像素密度可以直接通过点间距计算获得,如式(1)所示。

其中,MP 表示LED 背景墙物理分辨率,Dh表示横向屏体数,Dv表示纵向屏体数,d表示屏体宽度(米),m 表示像素密度 (像素数量/平方米),p表示点间距(米)。
当面积相同时,点间距越小的LED 背景墙像素密度越高,物理分辨率也越大,摄影机拍摄的虚拟背景也可以越清晰。具体到内视锥与外视锥,外视锥的物理分辨率等于LED 背景墙的物理分辨率;内视锥面积虽然可调节,但其物理分辨率往往要小于外视锥的物理分辨率,但二者的像素密度相同,且与点间距的关系都遵循上述公式。因此总体来说,在条件允许的范围内,购置点间距相对小的LED 显示屏,将更有利于在拍摄中获得清晰的背景。
4.4 摄影机拍摄环节
LED背景墙所显示的是离散像素组成的数字化影像,在摄影机拍摄环节,离散的像素经由摄影机镜头,在CMOS靶面上成像的情况将受到各种复杂因素的综合影响,特别是摄影机分辨率、摄影机拍摄距离与焦距、CMOS靶面大小与靶面像素间距等因素。
4.4.1 摄影机分辨率的影响
首先,摄影机自身的分辨率会影响拍摄获得的影像质量。前文已提到,摄影机分辨率包含镜头解像力、摄影机的设置分辨率与CMOS靶面的物理分辨率三个概念。
其中,镜头解像力是由光学镜头的物理特性决定的,通常以每毫米可解析的线对数表示 (lp/mm),镜头中心解像力最高,边缘解像力最低。因此在选用摄影机镜头时需要保证图像的边缘清晰度,应至少使得镜头边缘解像力≥1/ (CMOS像素点尺寸×2)。
此外,摄影机的设置分辨率是摄影机在拍摄中设置的参数,可进行自主化调节,而CMOS靶面的物理分辨率是其调节上限。虽然目前有些设备可通过插值等上变换算法提升设置分辨率使之大于物理分辨率,但受制于物理分辨率,后期算法并不能够增加真实的影像细节。
三个分辨率共同决定了拍摄获得影像所输出的分辨率。但影像背景是否清晰还受到LED 背景墙以及其他拍摄条件的影响。
4.4.2 摄影机拍摄距离与焦距的影响
现场拍摄时,LED 背景墙布置在演员的表演区域外围,需要与摄影机间隔较远的距离。此时LED背景墙的影像经由摄影机镜头成像在摄影机CMOS的靶面上,对于背景墙的单个物理像素在摄影机CMOS靶面的成像面积而言,往往要比背景墙物理像素面积小得多,如式(2)所示。

其中,M 表示放大率,U 表示物距,V 表示像距,f表示焦距。
放大率M 表示LED 背景墙的单个物理像素在摄影机CMOS靶面的成像直径(或宽度)与原始像素直径(或宽度)的比值。对于同一LED 背景墙,当摄影机镜头焦距不变时,拍摄距离越远,M 值越小;而当拍摄距离相同时,焦距越短,M 值越小。一般来说,摄影机镜头常用焦段一般在24mm 至200mm 之间,拍摄距离则往往以米计算。因此拍摄距离往往对于M 值有着决定性的影响,当拍摄距离越远,LED 背景墙的单个物理像素在摄影机CMOS靶面的成像面积越小,拍摄所获得的摄影机内视效背景的原始分辨率越高,最终所成影像便越清晰。但同时,拍摄距离大小受到摄影棚面积与LED 背景墙面积的制约。
根据拍摄经验并结合公式 (1) (2)可得出,LED 背景墙的最佳拍摄距离 (单位米)约为屏幕点间距数值的2.5倍。例如,当采用点间距为2.84mm的LED 屏幕模组拼接的背景墙时,其最佳拍摄距离大约为2.84×2.5≈7米。据此可估算,目前市场上可应用的小间距LED 显示屏,摄影机最佳拍摄距离范围大约在5~10米之间。
4.4.3 CMOS靶面与靶面像素间距的影响
由于输入影像在LED 背景墙的显示分辨率等于背景墙的物理分辨率时,可使影像的清晰度达到最高,此时显示分辨率的像素宽度便相当于背景墙的点间距(此处考虑开口率为100%的理想情况)。理论上,当LED 背景墙的点间距越小,其单个像素在摄影机感光器件CMOS靶面上的成像面积也越小,这也意味着拍摄所获得的摄影机内视效背景的原始分辨率更高,因此最终所成影像也更清晰。但在实际拍摄中,并不是LED 背景墙点间距无限制地越小越好,摄影机成像一方面受CMOS靶面的物理分辨率以及靶面像素间距的制约,另一方面也受成像的最小弥散圈影响。
当LED 背景墙处于焦平面时,其在摄影机CMOS靶面上所成影像是最清晰的,理论上需要保证LED 背景墙的单个灯珠像素在摄影机CMOS靶面上成像范围大于等于靶面的1 个物理像素单元。然而,由于透镜成像时存在最小弥散圈的概念,即当LED 背景墙单个像素灯珠在摄影机CMOS靶面的成像面积小于最小弥散圈时,便无法再得到人眼可分辨的更清晰的影像。因此还需要结合摄影机拍摄距离、CMOS靶面像素间距以及由放映要求推断获得的最小弥散圈直径等相互关系,推断出LED 背景墙可用的最小点间距,如式(3)所示。

其中,P表示LED 背景墙点间距,d表示摄影机成像的最小弥散圈直径,M 表示放大率,U 表示物距,f表示焦距。
因此结合摄影机性能以及拍摄要求,当LED 背景墙的点间距缩小到一定程度以后便不需要再缩小了。例如,0.03mm 是目前全画幅摄影机较通用的最小弥散圈直径要求,在拍摄距离是5~10 米的LED 虚拟摄影棚内,结合24mm 至200mm 的常用镜头焦段,可计算对于LED 背景墙的的点间距最小值,如表3所示。

表3 常用镜头焦段的LED 屏幕最小点间距
而由于LED 虚拟摄影棚内往往以75mm 以内的焦段进行拍摄,且LED 背景墙往往处于焦外,因此结合上表,LED 屏幕点间距大约保持在2~4mm即可满足绝大部分拍摄需求。
在实际拍摄中创作者也可以根据成片所需的分辨率大小、最小弥散圈直径、拍摄距离范围以及所用的镜头焦段,来估算需要选用LED 背景墙的点间距等技术规格,或根据已有背景墙规格反推需要租借摄影机的技术规格。
对于4K 分辨率的拍摄要求,目前LED 显示屏及相关技术已可以支持,当使用40mm 以下广角镜头拍摄时,为保证摄影机在拍摄LED 背景墙时同样能获得4K 级别的虚拟背景,可选用2mm 左右点间距的LED 显示屏,一般需要至少搭建高4~5米以上,宽8~10米以上的LED 背景墙,且摄影机拍摄距离一般可保持在5~10米左右,焦距越短,拍摄距离越短;而当LED 背景墙的点间距更大时,搭建面积也需要更大,且摄影机需要保持更远的拍摄距离。当使用标准镜头或长焦进行拍摄时,焦距越长,LED 背景墙则越需要置于景深之外,且与焦平面保持较远的距离,从而使背景呈现出虚化的效果。
5 分辨率与摩尔纹现象
随着基于LED 背景墙的电影虚拟化制作日益广泛地应用到创作实践中,使用数字化的离散采样方式采集离散的数字化信号也将越来越普及。与电视直播领域不同的是,电影制作一方面要求更高技术规格的影像质量,另一方面在制作流程中摄影机本身的运动、参数调整都要远远复杂于电视直播。这也对电影制作领域产生了新的要求:一方面采集设备与被采集设备需要追求更高的物理分辨率以提升现场拍摄成像的清晰度;另一方面这也意味着采集与被采集物理设备的分辨率差距会越来越小,而当二者物理分辨率相近时,还可能会出现另外一个成像质量问题——摩尔纹现象(Moiré Pattern)。
摩尔纹是数字时代离散化采样方式造成的一种采样混叠的失真现象,其本质上是一种噪声,也是拍摄LED 背景墙成像时经常出现的问题,主要表现为拍摄影像中出现类似水波状或螺旋状的条纹、斜条纹或横条纹等并伴随着不断闪烁的现象,如图10所示。

图10 拍摄LED显示屏形成的摩尔纹
目前学术界对摩尔纹产生的原因主要从波的干涉(Wave Interference)这一物理学理论层面予以解释,即当频率相近的两个光栅平面进行叠加时(可数学表示为两个正弦函数的乘积),便会产生摩尔纹[4],如图11 所示。根据奈奎斯特采样定理(Nyquist Sampling Theorem),当采样频率至少为被采样信号最高频率的2倍时才能不失真。

图11 摩尔纹产生的基本原理示意
然而,在基于LED 背景墙的电影虚拟化制作实践中,引起摩尔纹现象的原因更为复杂,这一方面是因为奈奎斯特采样定理主要研究的是采样连续模拟信号,而拍摄LED 背景墙则是用离散的采样方式采集离散的数字信号。另一方面,当使用数字摄影机拍摄LED 背景墙时,采样频率与被采样频率除了与两方设备的物理分辨率有关,还受众多因素影响。具体而言,在被采样端,LED 背景墙的物理分辨率、灯珠像素的排布规则、屏幕点间距、屏幕开口率、屏幕刷新率,甚至是显示的影像本身是否存在较密集的纹理等,都会对摩尔纹的出现产生影响;而在数字摄影机等采样设备层面,摄影机的位置与旋转、摄影机焦距与光圈、帧率、快门等也会不同程度地影响拍摄成像是否会产生摩尔纹及其程度。
对创作者来说,一方面要了解摩尔纹产生的原因及其影响因素,另一方面,摩尔纹很难从后期制作中完全消除,有时即便通过算法进行消除也是以牺牲清晰度与影像细节为代价,因此在拍摄环节就应最大程度地避免或最小化摩尔纹的出现。结合目前的研究与实践经验,主要可以尝试从以下几个方面着手:
第一,在影视制作的前期筹备中,就应对拍摄现场的情况做好充分调研,包括LED 屏幕如何选取以及相应的搭建方案,摄影设备的选取以及拍摄规格的制定,并根据这些前期条件测试演员可以表演的区域,摄影机与演员离LED 背景墙越远时,拍摄效果越好。
第二,在拍摄中,使用大光孔和浅景深,避免将摄影机焦点完全对在LED 显示屏上,当背景画面产生了一定的虚焦模糊效果时,可以有效地缓解摩尔纹现象。
第三,由于摄影机在运动过程中,无论是横摇(Pan)、俯仰 (Tilt)还是横滚 (Roll),只要摄影机靶面与被摄的LED 背景墙平面形成了夹角,夹角越大,出现摩尔纹的几率就越大,理论上环形屏或曲面屏的布置将是更加理想的,在实际拍摄中,应尽可能避免摄影机在运动时与被摄的LED 背景墙形成大的夹角。
第四,随着LED 显示技术的发展,从显示层面也出现了针对摩尔纹优化的光源设计以及小间距的LED 面板,在成本允许的范围内选择较小间距、刷新率更高、动态范围更大的LED 显示屏,将有效地减缓拍摄环节出现的摩尔纹问题。
6 总结分析与展望
基于LED 背景墙的电影虚拟化制作技术如今已在电影、电视与网络、广告等诸多领域展现出革命性的创新能力,同时其通过数字化的方式采集数字化内容,对于制作高质量影像带来了诸多新的挑战。因此,如何在复杂的制作流程中了解并精准地把控各因素对影像质量的影响,还需要软硬件设备生产商、影像技术团队与创作者的共同努力。
目前该技术已支持产出4K 级别的高分辨率影像,相信随着实时渲染、视频信号处理、小间距乃至微间距LED 显示等相关技术的不断发展与突破,在LED 背景墙拍摄中所遇到的诸多成像质量问题,诸如拍摄成像的分辨率问题、摩尔纹现象等都将得到进一步优化与解决,从而为更高技术规格的影像、更加丰富多彩的影视故事与内容提供极具创新性和优质的制作手段。
注释
①图片来源:https://www.bromptontech.com/product/sx40/。
②图片来源:https://www.novastar-led.cn/index/products/index.html?id=9。
③信息来源:https://www.roevisual.com/zh-cn/products/black-pearl。
