工业机器人集成应用“1+X”考证培训实训项目开发与应用*
2023-02-19云南机电职业技术学院黄燕燕窦楠胡辛豪
云南机电职业技术学院 黄燕燕 窦楠 胡辛豪
针对工业机器人集成应用“1+X”证书培训过程中设备台数较少,学生人数众多,培训时间有限的问题,基于结合了虚拟仿真技术、PLC 控制技术和组态技术的虚实联调工作站,开发适用于工业机器人集成应用“1+X”证书培训的实训项目,编写实训任务书,利用信息化技术制作教学资源,创新教学方法,尽量在有限设备台数和有限培训时间的情况下,最大程度地提高培训质量,完成“1+X”培训任务,提高证书通过率。
1 虚实联调工作站介绍
工业机器人集成应用“1+X”考证使用的设备是华航唯实KH11 平台。
鉴于学校实训设备台数较少,学生在不熟练工业机器人现场编程操作的情况下在设备上花费的时间太长的问题,基于实训设备建立了一个虚实联调工作站,包含设备中的执行单元、工具单元和仓储单元,能够仿真取放工具和取放轮毂等典型工作任务,并且在虚实联调工作站上的操作方法与在实际设备上是相同的。虚实联调工作站的使用可以大大减少学生使用设备进行练习的时间,克服确实存在的设备不足的困难,其整体模型如图1所示。
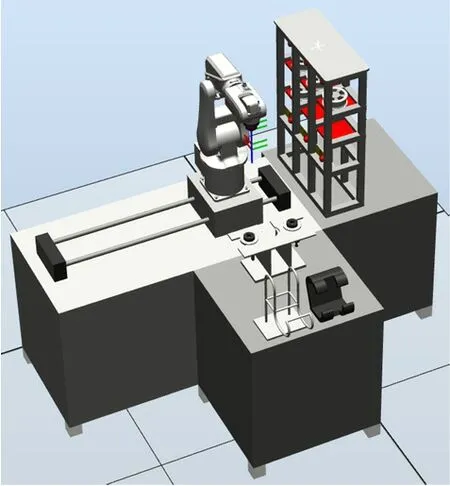
图1 虚实联调工作站Fig.1 Virtual and real joint debugging workstation
其中执行单元包含一个伺服轴及可以随伺服轴移动的IRB120 机器人;工具单元主要包含安装在机器人末端的快换工具以及放置在工具架上的夹爪工具和吸盘工具;仓储单元是一个有上下两层共6 个仓位的立体仓库,可放置6 个轮毂工件。
与一般的虚拟仿真工作站不同,虚实联调工作站在虚拟仿真技术的基础上,还打通了PLC 控制器与虚拟仿真工作站之间的数据通讯,在PLC 控制器上编程可对虚实联调工作站进行控制。
2 实训任务设计
基于虚实联调工作站,根据工业机器人集成应用“1+X”证书的等级标准,参照目前已有的考核试卷,并吸取多次试点考证培训的经验,由浅入深、由各单元分别调试到系统集成设计和调试,设计开发循序渐进的实训项目,进行项目化教学,以增强学生对各种技术集成应用的能力,充分培养学生对于综合性问题的分析与解决能力。
3 系统联调任务
下面通过系统联调任务的讲解说明虚实联调工作站的具体设计和应用虚实联调工作站进行教学的具体过程。
系统联调任务是依照工业机器人集成平台的工作流程顺序,根据工具单元、执行单元和仓储单元的典型工作任务设计的,具体任务为:工业机器人先去工具单元取夹爪工具,再去仓储单元第6 仓位取轮毂,再把轮毂从仓位6 搬运到仓位5,最后把夹爪工具放回工具单元的任务。
3.1 解包运行工作站
打开RobotStudio6.08 软件,在文件-共享中点击解包,把虚实联调工作站的工作站包文件(后缀.rspag)解压出来,注意目标文件夹的路径中不能包含中文字符。
3.2 工作站初始状态查看
为了完成任务要求,我们需要编写4 个例行程序:取工具、放工具、取轮毂、放轮毂。打开虚拟示教器,首先在程序编辑器中可以查看到Main 函数中没有程序,但在例行程序中已经添加了一个例行程序SF(num wz),用于控制执行单元伺服轴移动到具体位置。在输入输出中也已添加了4 个信号,如图2 所示,其中DO1_XiPan是吸盘工具的控制信号,DI0_ZhenKongBiao 是吸盘工具真空表的输入信号,由于任务中用的是夹爪工具,这2 个信号都不用。我们用的是DO0_KuaiHuan 和DO2_JiaZhua 2 个信号。DO0_KuaiHuan 是快速工具的控制信号,0 为安装工具,1 为卸载工具;DO2_JiaZhua 是夹爪工具的控制信号,1 为夹住,0 为松开。

图2 输入输出信号Fig.2 Input and output signals
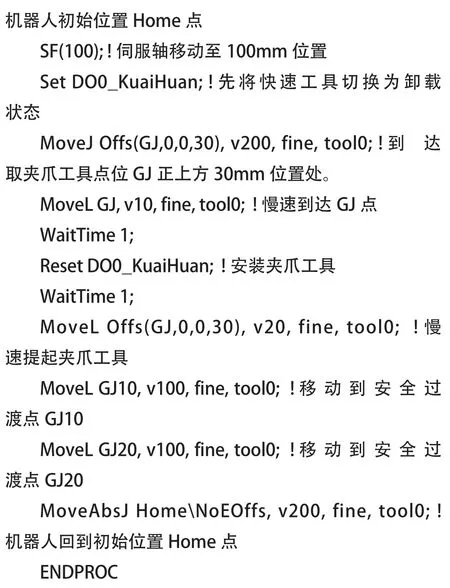
3.3 编写取工具例行程序
先将机器人切换到手动模式,在程序编辑器中打开例行程序,文件-新建例行程序,添加取工具的例行程序,取名为MGetTool(),接着为其编写程序如下:

3.4 仿真运行取工具程序
点击Enable 使能器,使电机切换到启动状态;点击示教器右下角菜单,把运行模式改为单周模式;在程序编辑器中点击调试-PP 移至例行程序-MGetTool()。使用单步运行或全速运行查看机器人运行结果。若运行完需要回到初始状态从头开始调试,点击菜单栏仿真-重置,找到保存好的初始状态Start,重新调试。
3.5 编写仿真运行取轮毂、放轮毂、放工具程序
以3.3 同样的方法添加取轮毂MGetHub()、放轮毂MPutHub()、放工具MPutTool()例行程序,编写完程序之后参照3.4 的方法调试仿真运行。程序的编写基本与取工具类似,注意伺服轴要移动到合适位置、工具在动作之前要提前复位、动作前后都加一条等待指令、移动过程中要添加安全过渡点、接近动作点时运行速度要调慢等问题。
3.6 调用例行程序
4 个例行程序都编写并调试成功之后,在主函数Main()中调用。
此时可以直接在自动模式下,对任务进行整体调试运行;自动模式下将电机切换到启动状态,不需要Enable 使能器,而是打开Control Panel 点击白色的启动按钮即可;在程序编辑器中点击“PP 移至Main”,再按下全速运行按钮,虚实联调工作站就会按要求执行任务,如图3 所示。

图3 机器人即将放置轮毂Fig.3 Robot is about to place the hub
4 教学方法设计
4.1 线上教学资源
在考证培训教学过程中,充分利用信息化教学方法,基于实训任务录制教学视频,利用信息化技术创建教学资源,并整理至云课堂中,方便学生学习。特别是对于需要复杂操作步骤的实训项目,在考证培训过程中录制教学演示视频,学生可一边看视频一边操作,有疑问时向老师提出,有利于学生提前预习、课后复习、反复观看提高理解和熟练度。
4.2 PLC 设备与仿真工作站虚实联调
我校工业机器人集成应用实训设备台数较少,但西门子1200 系列PLC 设备充足,在实际培训过程中,可以先把学生安排在PLC 实训室进行培训,在真实PLC控制器设备上编程对虚实联调工作站进行控制。这样,既解决了实训设备不足的问题,消除了学生实操过程中会损坏珍贵设备的顾虑,又能增强虚拟环境的真实感,提高学生兴趣,还能保证每位同学有充分的练习时间。
4.3 虚拟仿真结果应用于实操
学生在虚实联调工作站上完成编程调试仿真,得到正确的仿真效果后,提交仿真运行视频给老师,待老师确认正确后,可带着电脑或U 盘到实训室排队进行实操练习。利用RobotSudio 软件的在线功能,学生在虚实联调工作站中编好并已用仿真效果验证过的程序,可以通过网线快速地下载到工业机器人中。或提前在RobotSudio 软件中将系统导出备份,拷贝到U 盘中,再用U 盘将系统恢复到机器人设备上。这样,在实际设备中只需重新示教对点,就能完成一个项目的调试,大大节省了每一位学生占用设备的时间,解决了教学资源紧缺的问题。
4.4 线上线下混合式教学
在进行虚拟联调仿真练习之时,如果有学生率先完成,则可以先进入工业机器人集成应用实训室进行实操训练。通过线上课堂开启直播,实训室实操画面将同步给还在PLC 实训室仿真练习的学生,培训老师可以在线上讲解实操内容及注意事项,同时可以在线上给学生答疑,并激励他们抓紧练习完成仿真后排队实操。通过这种线上线下混合教学的方法,可以最大限度地利用实训设备和场所,缩短培训时间,提高培训效率。
4.5 大屏幕展示实操步骤
在工业机器人集成应用实训室实训过程中,使用RobotSudio 软件的在线功能,将现场学生实操的示教器界面及操作过程在大屏幕上呈现,让在实训室排队和线上观看的学生实时观摩学习,增加旁观学生参与感。
5 结语
本文设计的虚实联调工作站和实训任务,创新了实训方法,丰富了实训内容,已在工业机器人相关课程教学、“1+X”考证培训及技能大赛选手培训中进行了实践应用,教学效果良好,确实节省了培训时间,减少了教师工作量,学生学习效率大幅提高。在后面的教学过程中,会继续应用虚实联调工作站进行教学,总结经验,不断增加、改进实训任务和教学资源,完善教学设计。
引用
[1] 董虹星,周曙红.“1+X”工业机器人集成应用证书培训新形态一体化教材建设研究[J].实验技术与管理,2022,39(1):204-209.
[2] 冯凌云,刘凯.虚实结合的工业机器人实践教学平台开发与应用[J].实验技术与管理,2021,38(5):223-229.
[3] 张姣.虚实结合的工业机器人实验室建设探索与实践[J].南方农机,2021,52(13):160-161.
[4] 朱新杰,王庆九,顾大强,等.虚实结合的工业机器人实验教学方法[J].实验技术与管理,2020,37(10):167-170+200.
[5] 杨利,陈柳松,谢永超.基于PLC和工业机器人的智能仓库系统设计[J].自动化技术与应用,2021,40(7):72-75.
[6] 夏中坚.工业机器人的虚拟仿真技术在信息化课程教学中的有效应用[J].南方农机,2021,52(10):148-149.
