浅谈双车道隧道超车条件
2023-02-14邓凯
邓 凯
(云南省交通规划设计研究院有限公司,云南 昆明 650011)
0 引言
隧道路段由于车辆行驶环境封闭、照明条件下降,对驾驶人生理和心理造成影响。现今国内各地公路建设和管理单位普遍采用隧道内禁止变道、超车的交通管理方案以保障运营安全。在早期我国山区公路运营里程短、隧道比例不高、隧道长度较短,禁止变道、超车的规定并未显著影响安全与通行效率。
随着我国公路网的不断建成完善,为进一步快速、通畅地到达目的地,公路不断向山区地形复杂的区域延伸,桥隧比例和隧道的长度也在不停刷新纪录。在隧道长度和数量不断增长的同时,汽车工业蓬勃发展,不同车型之间性能与运行特性差异也不断加大。隧道由洞外开始至洞内全线禁止变道、超车的交通组织方式越来越不能满足新建公路的安全与通行效率需求。
根据存在的实际需求,结合现今驾驶行为特性、交通流特性、线形指标,以及相关设施相互影响分析,开展隧道交通组织方案研究,在满足安全的前提下,提升驾驶舒适性与驾乘体验感受,进而提升隧道路段运营安全水平。
1 国内外研究应用现状
美国、英国相关道路标线的设计文件并未针对隧道内的标线进行明确的规定,相关文献并未指出隧道内如何设置换道区域,以及换道区域的长度。同时,德国等欧洲国家,隧道路段普遍采用虚线,允许车辆变道行驶。美国不建议建造公路隧道,特别不喜欢建长隧道。有海底隧道(Baltimore,VABeach,NY),但隧道造价过于昂贵、养护困难、驾驶人心理压力太大、事故救援难度高。早期在PA 的公路隧道改道后废弃了。SHA 的I-68 公路在SidelingHill 避开了山区,当年论证时否定了隧道方案。国外以少建或不建公路隧道为主。
我国关于隧道车行道分界线的研究很少,设计界也通常采用一刀切的形式。为了避免隧道中车辆因变道引发交通事故,大部分隧道的车行道分界线采用实线分离车辆[1]。针对此问题咨询交通部公路院等规范编制单位,回复为相关规范细则中仅为示意,并非规定隧道内不可变道。
《中华人民共和国道路交通安全法》第四章—道路通行规定,第二节—机动车通行规定。第四十三条:同车道行驶的机动车,后车应当与前车保持足以采取紧急制动措施的安全距离。有下列情形之一的,不得超车:
(1)前车正在左转弯、掉头、超车的。
(2)与对面来车有会车可能的。
(3)前车为执行紧急任务的警车、消防车、救护车、工程救险车的。
(4)行经铁路道口、交叉路口、窄桥、弯道、陡坡、隧道、人行横道、市区交通流量大的路段等没有超车条件的。
其中,对于隧道路段是否全部为没有超车条件,还是隧道个别路段线形指标偏低不具备超车条件,存在以上两种情况的解读,由于缺少司法解释,该规定并不明确。
《中华人民共和国公路法》没有针对隧道路段交通组织的规定。
综上,国外主要发达国家在隧道路段的建设方面均较为谨慎,均没有经历过我国西南部山区高速公路隧道、公路隧道大范围建设的情况,没有可供我国参考的相关运营管理经验;国内对于隧道路段交通组织的法规并未禁止变道。
2 隧道路段超车条件分析
隧道行车影响因素分析:
(1)驶入隧道时,光线由明到暗,考虑到视觉器官的感受性对光刺激变化的相顺应性,采用暗适应过程作为进入洞口后禁止变道的控制性因素,禁超长度需综合考虑亮度变化区间对应的暗适应时间。
(2)驶离隧道时,光线由暗到明,由于洞外在白天的自然光照下,隧道朝向影响,偏东西向隧道的白洞效应在每天相应时间段内影响突出,明适应过程作为驶出洞口后禁止变道的控制性因素,禁超长度需综合考虑亮度变化区间对应的明适应时间。
(3)隧道内中间段亮度均匀不发生变化,线形指标不变的情况下能提供固定的视距。但驾驶员在亮度不同的环境下视野范围与视认距离均不相同,所需视距长度与照明亮度关系呈正态分布;在现行隧道照明规范的规定值内,呈反比。
(4)隧道洞内中间段,不受环境突变影响,不存在大雾影响视距,不存在路面干、湿导致摩擦系数突变。
对向行车的隧道内能否变道的控制性因素为“与对面来车有会车可能”,双车道公路最主要特征为需要借用对向车道才能进行超车,超车时的车距判断直接影响车辆是否能保持安全车距。
车速越快,驾驶人越要注意到远方,视野变得越窄,动态视野与行车速度成反比,如表1 所示。

表1 行车速度与视野、注视距离的关系
综上所述,能否超车的条件应该为“能否提供足够的超车视距及其超车行程”。隧道的接近、驶离的过渡段不具备能够变道超车的条件,不应允许变道超车;在隧道过渡段影响区域外的中间段,可通过加强有效视野范围内的诱导、提示,提供车道信息预告、警告的方式,在隧道内中间段允许车辆超车。
3 实例分析
以云南省在建的某国道特长隧道为例,该隧道为长度10 494 m 的单洞双车道对向行车的特长隧道,隧道设计建设采用80 km/h 设计速度对应指标。洞内长时间行驶且单向仅有一条车道,根据设计速度40 km/h 测算,车辆需要945 s(15 min 45 s)才能完全通过隧道。
针对隧道内跟车行驶容忍情况进行了抽样问卷调查,调查结果如图1 所示,对于“隧道内禁止变道,前方车道拥堵排队或前车比您的车速慢,相邻车道通畅”的情境下,驾驶人最大容忍跟车时长的调查结果发现:16.25%的驾驶人容忍度在1 min 以内,40.25%的驾驶人在1~5 min,20.37%的驾驶人容忍度在5~10 min,16.68%的驾驶人能够容忍跟车10 min 以上;同时有6.45%的驾驶人做其他选择,多数回复为应遵守交规,不换道。

图1 隧道内跟车行驶容忍情况抽样调查结果
根据抽样问卷调查结果,仅有23.13%的驾驶人能够忍受跟车10 min 以上的情况。此类情况下小型车长时间在郁闭空间跟随大型车慢速行驶,不能变道超车,严重影响了通行效率、驾驶舒适性及驾乘体验感受。
由于隧道内仅有2 条行车道,不应设置硬隔离设施(包括间隔设置),在发生交通事故的紧急情况下,硬隔离设施会导致单向或双向车道上的机动车完全无法通行,结合隧道长度超过10 km,会对救援、运营养护等工况有不利影响。隔离设施作为障碍物设置于隧道净空范围内,间隔设置或全线设置皆存在端头影响行车安全的情况。
该隧道内区域路段无横向干扰,隧道外500 m 内无平交口、民居等可能造成横向干扰的因素。
隧道洞内净宽11.00 m,净高5.00 m,行车道宽3.75 m,硬路肩0.50 m,具备超车所需的横向宽度。
线形为长直线—曲线(曲线半径4 541 m),纵坡2.18%(无竖曲线),隧道内、外3 s 范围内无线形变化,路线线形指标较好。左转、右转停车视距能满足远高于设计速度的视距值。
隧道设置隧道机电设施,隧道照明设计中,各段照明设计长度、照明亮度、折减系数等均达到80 km/h 对应指标。
该隧道内能否安全超车主要取决于驾驶员能否及时、准确判断车辆间距与超车距离。
隧道内限速40 km/h,考虑到超车时速度需要提高,采用60 km/h 对应视野86°,注视距离335 m;安全超车距离参考2015年至今多篇双车道超车模型研究结论,以小客车为主要超车车型,取超车初始速度、对向车辆速度、被超车辆速度40 km/h,超车速度取60 km/h,所需最小超车视距为534.1 m,超车时间为15.88 s[2],实施超车行为前调整时间取1.2 s,叠加变道后发现有对向来车回到原车道动作时,驾驶员需要反应时间,安全超车距离向上取整为600 m。超车视距大于有效注视距离。若允许借道超车,需要提供一个超视距的辅助信息采集、处理、发布的措施。
基于上述分析,提出的交通组织方案如下:
(1)划分隧道路段允许变道和禁止变道范围。禁止变道范围,应采用明暗适应过程为控制指标,隧道洞内500 m、洞外150 m 禁止变道。并根据相关规定设置完善、配套的地面标线及交通标志。
(2)考虑到各类车辆及其驾驶员特性,采用分车型管控的方式,隧道全线大、中型货车禁止超车,并严格限速40 km/h;客车在隧道内允许超车路段可变道、提高车速,以达到快速完成超车行为的目的。
(3)隧道路段提供超车辅助决策系统。遵循低位诱导原则,高密度路面突起路标、检修道轮廓标[3];中密度主动发光警示牌和警示灯;低密度反光环。系统运行逻辑为检测单元检测车道内车辆运行情况——路侧处理器处理——提示单元发布,如图2 所示。
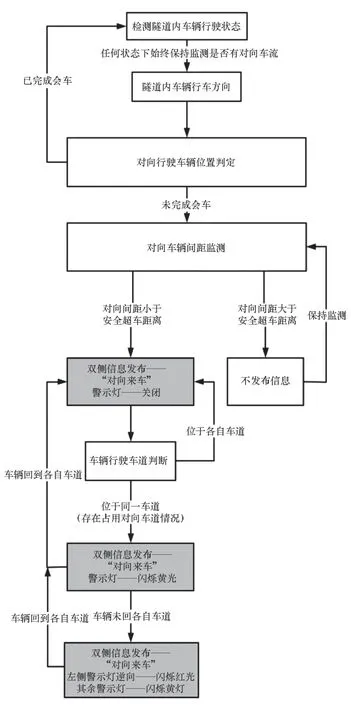
图2 辅助决策系统流程图
车道内检测单元:感应突起路标,以检测车道内路面情况。间距10 m 设置于两侧车道边缘线外、路中车道分界线处。
提示、警示单元:间距100 m 设置信息发布牌,显示内容为“对向来车”,间距100 m 条形警示灯,间隔设置以达到每50 m 一处的效果。
间距500 m 设置一道双面隧道反光环。
路侧处理器单元:根据检测单元性能设置,可不采用高集成度处理器,处理简单逻辑,隧道内允许超车路段(9 000 m)之间汇总统一处理。判断车辆行车状态、位于哪向车道、车辆间距。间距小于600 m 时,发布提示信息。
信息发布单元:
(1)平时保持熄灭。
(2)需要提示车道回到原车道时,条形警示灯闪烁黄色灯光,信息发布牌显示“对向来车”。
(3)待车辆回到各自车道时,闪烁灯关闭,持续显示“对向来车”信息。
(4)至车辆完成会车后,全部熄灭。
4 结语
经综合分析现有法规、条例及相关研究成果,公路隧道能否变道超车,可以依据是否具有超车条件来确定。该文中提出了隧道内超车条件的主要影响因素为能否提供足够的超车视距及超车安全距离。该文结合实例分析道路线形条件、照明条件等各类影响因素,并根据分析结果提出一个具有可实施性的隧道交通组织方案及辅助决策系统,为驾驶员在决策借道超车或放弃超车行动时提供必要的提示,减少因为超车时的车距判断偏差形成的安全隐患。
在不同的交通流、服务水平、车辆运行特征下,关于安全距离的确定还需进一步完善,包括超越车辆时被超车辆速度变化、对向同时存在超车动作的车辆等行为可能造成的影响;引入超车模型中超车速度对应安全性、舒适性因素;纵坡、竖曲线中车辆加减速特征的影响等。以达到提升驾驶舒适性与驾乘体验感受,进而提升隧道路段运营安全水平的目的。
同时,该系统采集、处理的数据,可在以后接入智慧公路等平台,为更高级别辅助驾驶、自动驾驶提供超车决策、事故预防的数据。系统具备扩展使用到高速公路隧道内辅助提示的空间,采用的车道级突起路边检测器可以采集同向车辆的位置、间距,发布车辆安全间距提示信息,提醒车辆保持车距;同时也可提示侧后方来车情况,避免车辆变道车道时与侧后方来车发生碰撞。
