基于AHP方法的战场目标三维伪装效果评估
2023-02-11吕城龙郑自强
吕城龙,李 凌,郑自强
(1.陆军工程大学 研究生院,南京 210007;2.陆军工程大学 野战工程学院,南京 210007)
1 引言
战场目标的伪装效果直接关系到其在战斗中的生存概率,伪装效果评估是有效检验伪装效果的一种有效方式[1]。现代战争中,无人机在侦察、打击等任务中发挥的作用越来越凸显[2],因此,建立一种基于无人机侦察视角的战场目标伪装评估方法很有必要。运用无人机倾斜摄影三维建模技术[3],将被检测对象数字化、三维化,生成战场目标伪装环境的三维成像效果[4],能够有效模拟侦察无人机对战场目标的侦察场景。
现阶段国内外有大量对无人机倾斜摄影三维建模技术和伪装效果评估技术的研究。Che Defu等[5]提出了一种无需人机交互的自动实现单个三维建筑模型的新方法;Jason S.Augustyn等[6]提出了利用VR技术辅助伪装评估的方法。在三维伪装效果评估方面,任光阔[7]运用计算机视觉和图像处理技术,设计实现了一套面向空中侦察的伪装效果可视与评估方案;涂建刚[8]提出了一种利用无人机航拍,生成高空光学侦察图像的等效检测方法。但在如何客观综合评估战场目标的三维伪装效果这一方面的研究还不够完善。
为了有效评估战场目标伪装效果,本文中从目标与背景图像的特征指标相似度入手[9],运用系统评价方法手段[10],建立单视角、多视角两级目标伪装评估模型,并以无人机对伪装后的步战车进行航线侦察为例,对模型的有效性进行了验证。
2 基于AHP单视角目标伪装评估模型
假设侦察无人机在一次战场侦察任务中,对某一战场目标随机拍摄了m张照片(Z1,Z2,…,Zn),在评估伪装效果时共选取n个指标(q1,q2,…,qn)。
2.1 单视角目标伪装评估指标相似度矩阵

(1)

(2)
2.2 单视角目标伪装相似度评估
2.2.1单视角指标权重关系矩阵
依据层次分析法[11-12],指标两两比较,形成的指标重要性关系矩阵A如式(3)所示。

(3)
指标两两比较时的重要性等级及赋值如表1所示。
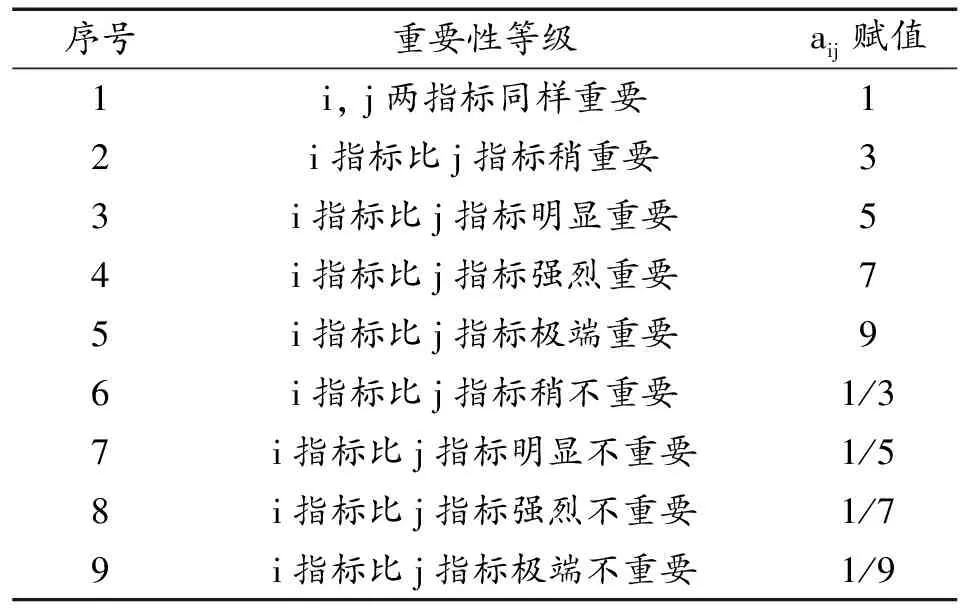
表1 指标两两比较时的重要性等级及赋值
2.2.2矩阵一致性判断
定义一致性指标CI,表示如式(4)所示:
(4)
其中: λmax为正互反矩阵A的最大特征根。
定义随机一致性指标RI。样本容量为1000的3~9阶随机矩阵的RI值如表2所示。

表2 矩阵阶数为3~9的RI值
判断一致性比率CR如式(5)所示:
(5)
若CR<0.1,检验通过,说明判断矩阵有效;否则需对判断矩阵进行调整后再进行一致性检验。
2.2.3指标权重向量求解
利用和法求解,对A的各行元素求和后归一化,公式如式(6)所示:
(6)
利用和积法求解,首先对A的每一行进行归一化,再按行相加求和归一化,公式如式(7)(8)所示:
(7)
(8)
利用方根法求解,对A的各行元素求几何平均后归一化,公式如式(9)所示:
(9)
以上式(6)(7)(8)(9)中,i, j=1,2,…,n。
2.2.4单视角目标伪装相似度
通过以上方法求解,可得权重向量矩阵W如式(10)所示:
W=(w1,w2,…,wn)T
(10)
则第i张照片中目标与背景的相似度YZ如式(11)所示:
YZ=YkW
(11)
3 基于AHP多视角目标伪装评估模型
3.1 基于航迹的目标发现概率模型
(12)
(13)
(14)

(15)
式(15)中:ε、ρ均为调整系数。
3.2 多视角目标相似度权重
令不同照片之间相似度的权重矩阵V如式(16)所示:
V=(v1,v2,…,vn)T
(16)
对于目标发现概率较大的照片,在评估其相似度时赋予较大权重,反之,赋予较小权重,能够更好地描述目标综合相似度,由此可以分析出,vi与Pi为正相关关系。
令vi=ηPi,为常数,可得:
(17)
本文中假定vi与Pi的一次方成正比,据此可求得不同照片的权重vi如式(18)所示:
(18)
(19)
3.3 多视角目标伪装综合相似度
最终可得该战场目标在此条航线侦察时多视角的综合相似度YM如式(20)所示:
(20)
该评估模型总的思路流程如图1所示。
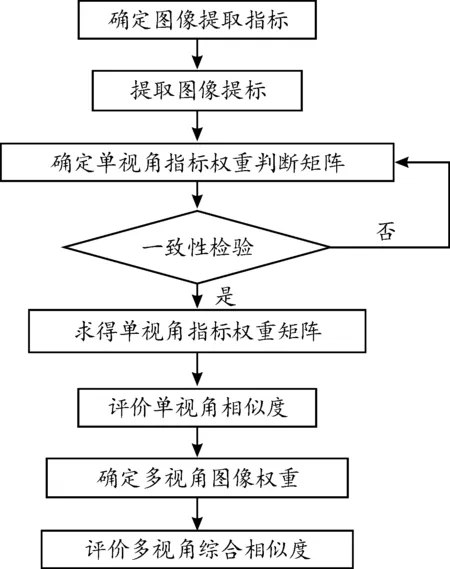
图1 评估模型流程图
4 战场目标三维伪装评估案例
某一侦察无人机在某一地域沿航线飞行执行目标侦察任务时,对某3个战场目标(目标3是由目标1、2组成一个集群目标)共拍摄了6张航空照片,如图2所示。评估目标与背景相似度时共选取了亮度差、平均辐射亮度差、纹理对比度、平滑度、熵、纹理角二阶矩、纹理相关性、余弦相似度等8个评估指标[14-15]。多位专家对8个指标两两之间重要程度的判断矩阵如式(21)所示。经提取计算,3个战场目标相对于背景的各指标绝对相似度如表3~表5所示。6张照片拍摄时飞机与目标的相对位置关系如表6所示。
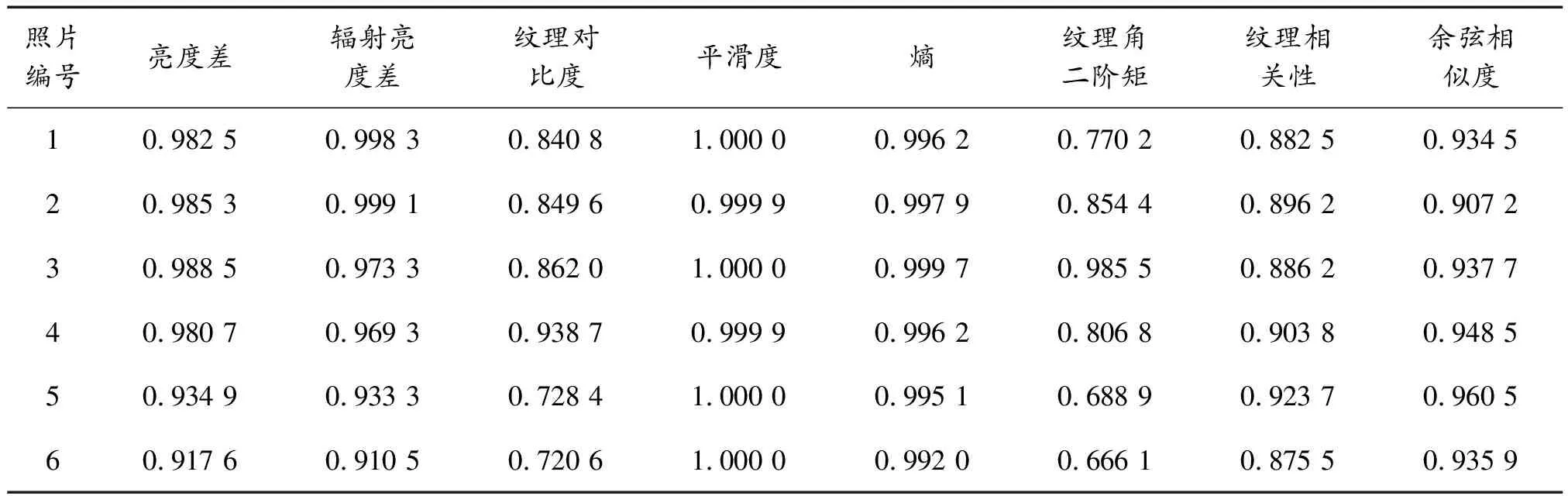
表3 目标1绝对相似度参数表
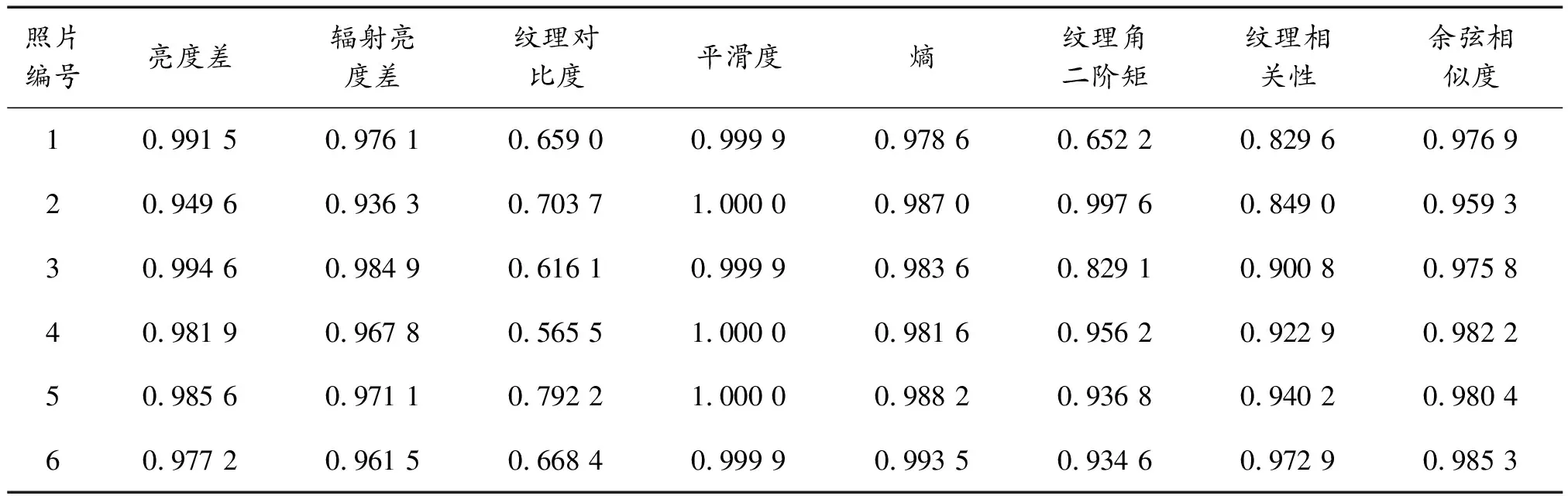
表4 目标2绝对相似度参数表
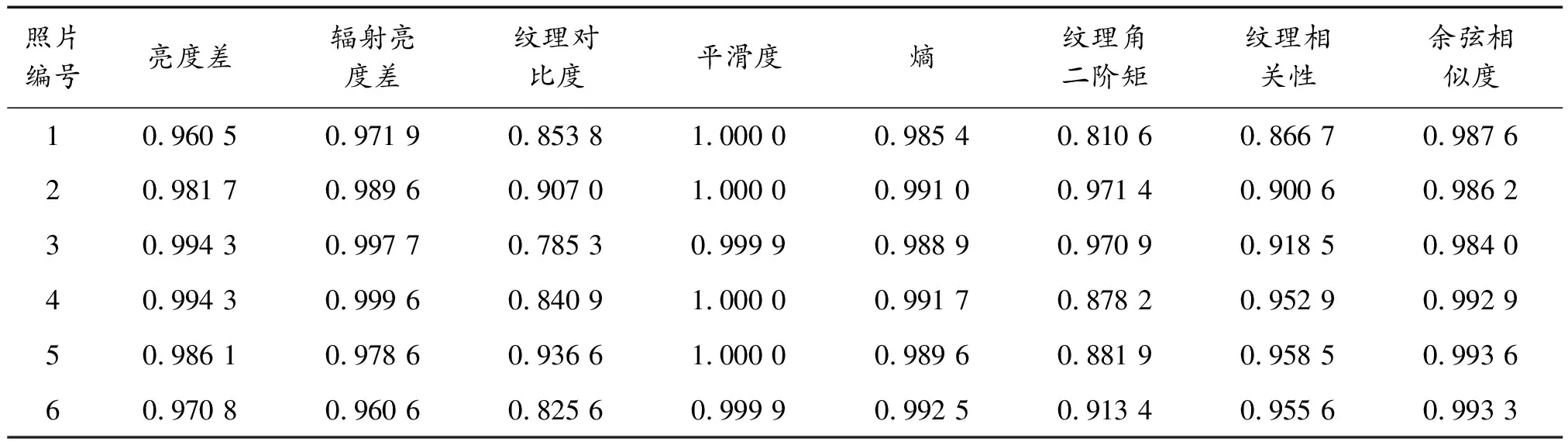
表5 目标3绝对相似度参数表
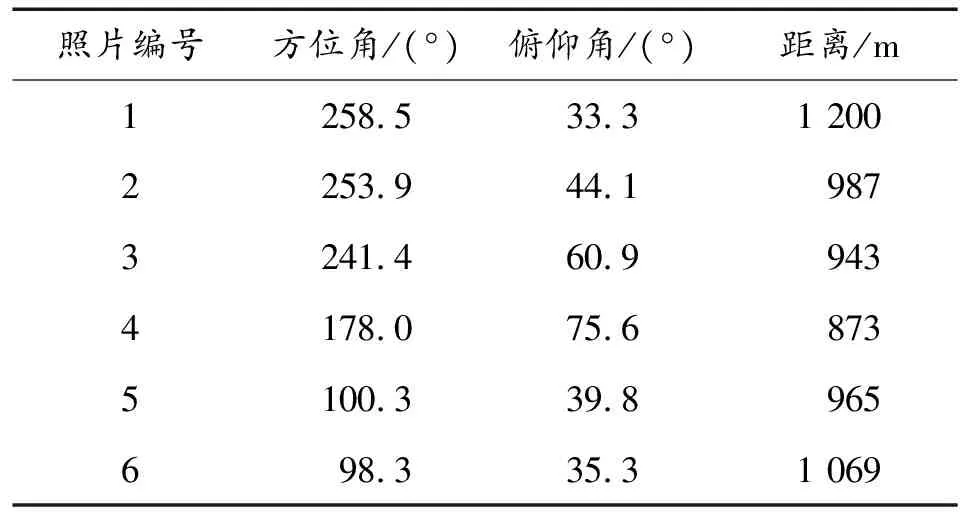
表6 无人机相对于目标的位置关系
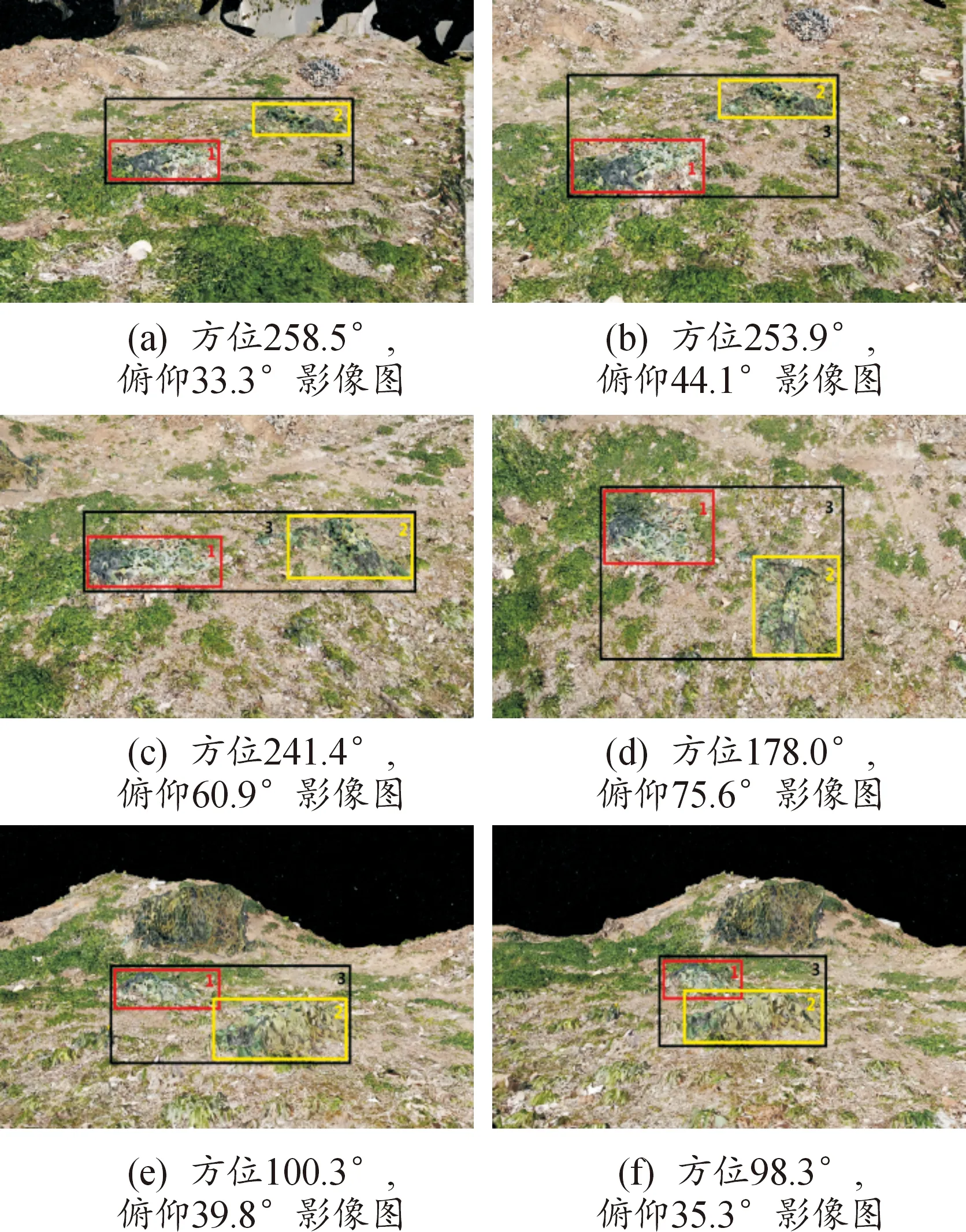
图2 无人机拍摄战场目标影像图
(21)
第一步,对式(21)进行一致性检验。首先求得判断矩阵的最大特征根,λmax=8.056 5,代入式(4),得CI=0.008 1;查表2,得到RI=1.41,代入式(5),得CI=005 7<0.1。此评估矩阵有效。
第二步,求单视角相似度。对式(21)求解,得到指标权重矩阵W。和法得到的解为W=(0.339 3,0.190 2,0.121 7,0.056 5,0.067 2,0.046 9,0.121 7,0.056 5)T;和积法得到的解为W=(0.344 8,0.193 4,0.117 4,0.057 9,0.065 0,0.046 1,0.117 4,0.057 9)T;方根法得到的解为W=(0.384 6,0.197 8,0.111 9,0.0498,0.056 5,0.037 7,0.111 9,0.049 8)T。根据式(11),求得单视角相似度。本文中选用方根法所得解,可得目标1的单视角相似度为(0.945 3,0.951 7,0.956 2,0.956 2,0.905 7,0.886 0);目标2的单视角相似度为(0.911 3,0.913 1,0.926 0,0.921 2,0.952 2,0.936 9);目标3的单视角相似度为(0.936 7,0.965 7,0.958 6,0.966 2,0.971 8,0.951 0)。
第三步,求多视角综合相似度。根据式(19)求得系数ρ=1 363,根据式(18)求得多视角目标相似度权重矩阵,V=(0.109 0,0.152 8,0.206 6,0.265 1,0.144 3,0.122 1)T。根据式(20),求得目标1、2、3的综合相似度分别为0.938 5,0.926 3,0.960 3。由此可知,伪装效果从好到差依次为目标3、目标1、目标2。
5 结论
战场目标伪装效果评估是提高我军战场生存能力的重要保障,本文中提出了基于AHP的战场目标三维伪装效果评估方法,较好地解决了伪装效果评估视角单一、主观性过强等问题。文章基于无人机倾斜摄影技术进行伪装场景三维建模,构建了更加立体逼真的伪装效果评估环境,这一多视角方法提供了更加丰富有效的评估信息;构建AHP模型对单视角条件下伪装效果进行评估,同时结合航迹发现概率进行相似度客观赋权,实现了多视角条件下AHP相似度综合评估。试验表明,本文中多视角评估方法合理有效,能够多角度、连续客观地实现战场目标伪装效果综合评估。该方法还可进一步推广至战场环境红外、雷达伪装效果评估问题。
