基于正交时频空调制的感知信号处理算法
2023-02-09熊礼亮刘喜庆公佳龙彭木根
熊礼亮,刘喜庆,公佳龙,彭木根
(北京邮电大学 信息与通信工程学院,北京 100876)
0 引言
随着后5G(Beyond Fifth-Generation,B5G)和未来6G移动通信系统的演进,网络被期望提供原生的感知能力,使能各种高精度传感服务,例如室内WiFi传感定位、车联网中车辆的感知探测[1],因而无线通信与感知技术的融合受到了广泛的关注。感知系统与通信系统在过去按照各自的功能用途与工作频段独立设计,呈现为分立发展的状态[2]。然而随着技术的发展,感知系统与通信系统具备联合设计的可能与潜力[3],同时业务也提出了对信息感知的扩展功能需求,在这样的背景下技术与业务共同催生了通感一体化(Integrated Sensing and Communication,ISAC)技术[4]。通感一体化是指通过共享软硬件、通感资源与其他信息,使得通信与感知功能相互协同的新型信息处理技术,对于提升系统频谱效率、硬件效率与信息处理效率具有重要意义[5]。提出并发展通感一体化的原因与动机主要包括以下几点:① 在系统组成结构上,通信与感知在信号处理算法、工作设备甚至系统硬件架构上并非完全独立而是有许多共同点,这为通信与感知的融合提供了潜在可能。② 在工作频段兼容方面,通信系统频段从Sub-6GHz发展到毫米波甚至太赫兹,总体发展趋势呈现为频段逐渐抬高,其与雷达的工作频段正逐渐接近并出现交叠,通信复用雷达频段实现二者频谱共享成为缓解频谱资源紧缺和提升频谱利用率的较好解决方案[6]。③ 通感一体化将独立的通信系统与感知系统融合以共享硬件设备,从而获得通用性和多功能性,并且在一定程度上减小了设备体积、降低了硬件成本[7]。④ 通信与感知的协作能够带来增益,产生互惠互利的效果,例如感知辅助通信进行信道状态信息采集和波束对齐等[4],利用感知获取的先验环境信息提升通信性能,而通信能辅助实现协作感知,提高感知维度、深度与精度[8]。
为了实现通信与感知的深度融合与一体化,需要依赖于物理层方面的研究,为此通感一体化信号波形设计与信号处理引起了学术界与产业界的广泛关注[9-11]。对通感一体化信号波形进行复用优化与融合设计是通感一体化实现目标感知和数据通信两种功能集成的核心问题,同时接收端的一体化信号处理技术对于提升通信与感知的性能也十分重要。总的来说,一体化的关键是选择合适的调制技术设计一种信号波形并结合信号处理手段,同时实现雷达感知与通信传输的功能并解决相应需求。
1 相关研究
目前,通感一体化信号波形设计方法按照使用资源的程度可以分为基于复用技术和基于波形共享技术的一体化信号波形[12]。基于复用技术的一体化波形体制对时频码空等多个维度资源进行复用,其优点是信息隔离度高与性能相互影响小,只需划分一部分资源便能隔离两种功能,并且设计较为简单;但缺点是没有实现通信与感知功能在某一资源域的完全共享,在同一域中同时运行两种功能势必会牺牲其中一方的性能。为了进一步提高资源利用率与一体化效率,基于共享波形的一体化波形设计成为了热点研究方向,是当前一体化波形设计的主流研究思路,其思想是采用单一的共用波形实现通感双功能。具体而言,共享波形又可以分为以感知为中心和以通信为中心的波形设计[4]。以感知为中心的波形设计是在已有雷达感知波形的基础上,对波形本身的参数进行通信信息调制,其主要思想是在保证雷达感知不受影响的同时,尽可能实现信息的传输,该设计方法在感知波形上进行信息嵌入存在的最大问题是通信速率极低。例如基于Chirp感知信号进行通信时,将信息调制到Chirp信号的相位,其通信速率取决于Chirp速率,相比于专用通信系统在同样的带宽下通信速率通常低几个数量级[13]。以通信为中心的设计基于通信波形在数据传输的同时进行雷达感知探测,直接采用通信信号作为一体化信号,能够保留原有经典通信波形通信速率高的优势[14]。但根据通信数据生成的随机通信波形,并非针对感知所需的信号自相关性和低旁瓣特性进行设计优化,所以感知性能很大程度受限,需要结合接收端一体化信号处理算法尽可能地提升感知性能。
考虑到在现有通信系统中融合感知的兼容性与可行性,以通信为中心的一体化波形与相应的信号处理算法作为必要的技术支撑具有重要研究意义,学者们对此展开了较多研究。作为通信系统常用的多载波调制信号波形,正交频分复用(Orthogonal Frequency Division Multiplexing,OFDM)具有数据传输速率快、频谱效率高、抗多径效应及子载波调制方式灵活等优点,被采纳为主流通信系统的物理层技术标准。并且OFDM信号用于雷达感知时没有距离-多普勒耦合效应,故可以独立地处理距离和速度信息。因此OFDM自然成为通感一体化信号的研究热点,被视为有竞争力的候选方案。早期基于OFDM信号的通感一体化方案为了使一体化信号具有良好的相关特性和抑制高旁瓣能力,对子载波上的通信数据符号进行脉冲压缩编码或其他优化编码处理。但该做法中OFDM波形的相关性依赖于符号信息导致不能保证可靠感知,在保证相关性时却限制了一体化信号设计的自由度,并且信号处理的计算复杂度高[15]。为了克服该问题,有学者提出了基于调制符号处理的OFDM通感一体化接收端信号处理算法,实现了估计目标距离和速度的感知功能[9]。该算法利用OFDM通感一体化系统框架收发同置的特点,接收端根据复数除法运算移除接收调制符号中包含的已知发送调制符号数据,对剥除发送符号之后的符号矩阵利用傅里叶运算,即可获取雷达目标有关距离和速度信息的二维成像。然而该算法仅通过设置参数来限定多普勒频移的取值从而减小子载波间干扰(Inter Carrier Interference,ICI),并不适合应用于实际场景。此外,OFDM在通信与感知功能上均存在一个根本缺点即固有多普勒容限差,在高速移动通感场景下对多普勒十分敏感,其通信性能与感知性能将会恶化。在通信方面,高多普勒扩展信道下OFDM遭受到严重的ICI。在感知方面,当雷达目标高速移动时,该波形能估计的最大多普勒频移受限于子载波间隔。OFDM的固有缺点使其难以适应未来快时变高多普勒信道环境,因此亟需设计能有效应对高动态环境的新型通感一体化波形与信号处理方法。
近年来,一种适合应用于高移动性场景的新型多载波调制技术正交时频空(Orthogonal Time Frequency Space,OTFS)吸引了较大关注,其将信号与信道映射至时延-多普勒(Delay-Doppler,DD)域的处理方式使得信号对多普勒并不敏感,能有效对抗多普勒的影响。并且,OTFS具有高速率、高谱效和低峰均比等优点,是一种极具发展潜力的波形技术[16]。OTFS的主要思想是引入了DD域信道表征及信号调制方法,在DD域中调制和表示符号信息,而非传统OFDM调制使用的时间-频率(Time-Frequency,TF)域,从而获得额外的时频分集增益[17]。值得指出的是,OTFS调制方式使用的DD域信道基于物理散射体进行建模,通过使用散射体的多径时延和多普勒参数描述信道不仅可获得利于信道估计的稀疏性,在感知时还能直接表示相对应的雷达目标距离和速度,因而OTFS作为通感一体化信号波形的候选者被广泛研究。文献[18]首次研究了基于OTFS的雷达感知问题,在随机数据符号基础上根据调制符号处理的思路提出了DD域匹配滤波(Matched Filter,MF)算法以估计雷达目标的距离和速度,其结果证明了将OTFS用于雷达感知处理的可行性,并显示出其感知远距离高速目标的优势。文献[19]针对单一目标的情况给出了OTFS与OFDM信号联合速度和距离的最大似然估计和克拉美劳下界,发现在保证通信速率的同时二者可以实现与调频连续波(Frequency Modulated Continuous Wave,FMCW)相同的雷达感知性能,但OTFS调制以复杂度为代价以及无循环前缀冗余获得了更高的频谱效率。为了降低接收端感知信号处理算法的复杂度,文献[20]通过引入目标运动参数范围的先验知识降低了信号矩阵维度,实现感知目标参数估计所提出的贝叶斯学习算法在提升感知性能的同时,有效降低了OTFS感知处理算法复杂度,但该方案的局限在于该先验知识并非一定符合实际情况。在实现高峰值旁瓣比(Peak Sidelobe Ratio,PSLR)方面,基于矩阵反演的调制符号消除方法以牺牲复杂度为代价提高了OTFS感知的PSLR,而基于谱相除(Spectrum-division,SD)的方法降低了复杂度但PSLR性能退化,无需目标的先验知识便能实现目标感知相关参数估计[21]。上述研究表明,通感一体化接收端感知信号处理算法对于提升雷达感知性能而言至关重要,因此有必要根据通感一体化信号的具体特点有针对性地设计低复杂度高性能的感知信号处理算法,有效提取接收回波信号中蕴含的感知目标信息特性。
基于以上分析,本文针对OTFS通感一体化接收机侧目标感知PSLR受限的问题,提出了基于最小均方误差(Minimum Mean Square Error,MMSE)准则和基于正交匹配追踪(Orthogonal Matching Pursuit,OMP)的感知信号处理算法。
2 系统模型
本文考虑了一个单输入单输出(Single-Input Single-Output,SISO)天线下的基于OTFS调制的通感一体化系统框架,OTFS通感一体化收发机采用与单基地雷达相似的配置方式即收发同置,由一体化发射机与接收机构成,如图1所示。该系统在感知目标并估计相关参数的同时与目标进行数据通信,即发射机产生的OTFS通感一体化信号可同时实现传信与感知双功能。对于通信而言,OTFS通感一体化收发机可与用户或目标侧的OTFS通信接收机进行上下行双向通信,发射机发送一体化信号与用户下行通信,接收机可接收与解调来自用户侧的上行通信信号。在感知方面采用下行主动感知的方式,发射机发送的一体化信号经目标对象反射后,由接收机处理回波信号完成目标感知探测。因此,一体化接收机包含OTFS通信与雷达感知信号处理两部分。OTFS作为通信信号时其通信接收机的信号处理已有较多研究,所以本文对此并不讨论,而将工作重点放在OTFS雷达感知上。
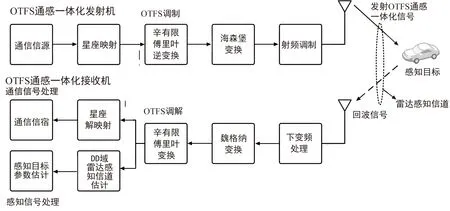
图1 基于OTFS调制的通感一体化收发机系统框图
为方便阐述收发机系统模型,引入OTFS的基本概念与符号表示。OTFS调制涉及到TF域和DD域中的处理与变换。TF域二维平面栅格可通过对时间和频率轴采样获得,定义为Λ=(nT,mΔf),T和Δf分别表示时间和频率轴的采样间隔,对应的采样点数为N和M,使用n=0,1,…,N-1和m=0,1,…,M-1表示时间和频率域的索引。同理,对时延和多普勒轴采样可得到DD域二维平面栅格,定义为Γ=(k/(NT),l/(MΔf)),其中1/(MΔf)和1/(NT)分别表示沿时延和多普勒轴的采样间隔,l=0,1,…,M-1和k=0,1,…,N-1表示时延和多普勒域的索引。从多载波调制角度解释,调制符号通过OTFS数据帧传输,一个OTFS数据帧在TF域平面栅格占用的总时长为Tf=NT、总带宽为B=MΔf。此时N和M分别对应于OTFS符号数量和子载波数量,T和Δf分别表示OTFS符号周期和子载波间隔,并且满足TΔf=1以保持多载波的正交性。
2.1 发射机
在发射机侧,首先由通信信源生成二进制比特构成的数据信息序列,并经过星座映射进行数字调制。假设二进制数据采用的数字调制方式为正交振幅调制(Quadrature Amplitude Modulation,QAM),获得长度为MN的发送调制符号向量x∈1×MN。将这些待传输的发送调制符号排列成一个二维矩阵XDD∈N×M并摆放于DD域二维平面栅格Γ上,XDD[k,l]∈XDD表示Γ上的第k个多普勒域和第l个时延域索引格点处的发送调制符号,故称XDD为DD域发送调制符号矩阵。并假设QAM调制符号XDD[k,l]独立同分布,符号的平均功率为Ps,满足根据DD域的处理思想,该方法使得XDD中的N×M个元素与Γ上的N×M个格点相对应,其中在多普勒方向占据N个格点,在时延方向占据M个格点。
XDD可通过辛有限傅里叶逆变换(Inverse Symplectic Finite Fourier Transform,ISFFT)映射得到TF域发送调制符号矩阵XTF∈N×M,其将占据TF域平面栅格Λ上的N个符号和M个子载波对应的时间频率格点,具体如下式:
XTF[n,m]=ISFFT(XDD[k,l])=
(1)
式中,XTF[n,m]∈XTF表示Λ上的第n个时间域和第m个频率域索引格点处的发送调制符号。从ISFFT的公式可以看出,每一个DD域调制符号都通过一个二维正交基函数被扩展到整个二维TF域平面上,即OTFS可看作是一种时频二维扩展技术。本质上来说,ISFFT是沿着DD域符号矩阵的每一行进行M点离散傅里叶变换(Discrete Fourier Transform,DFT),即从时延域映射到频率域,并沿着DD域符号矩阵的每一列进行N点离散傅里叶逆变换(Inverse DFT,IDFT)完成从多普勒域到时间域的映射。
通过对XTF[n,m]应用海森堡变换(Heisenberg Transform)可获得OTFS通感一体化时域基带信号,如下所示:
(2)
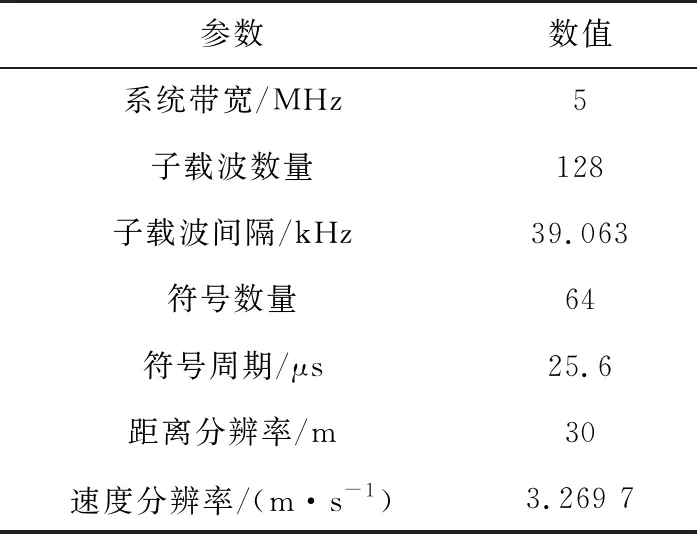
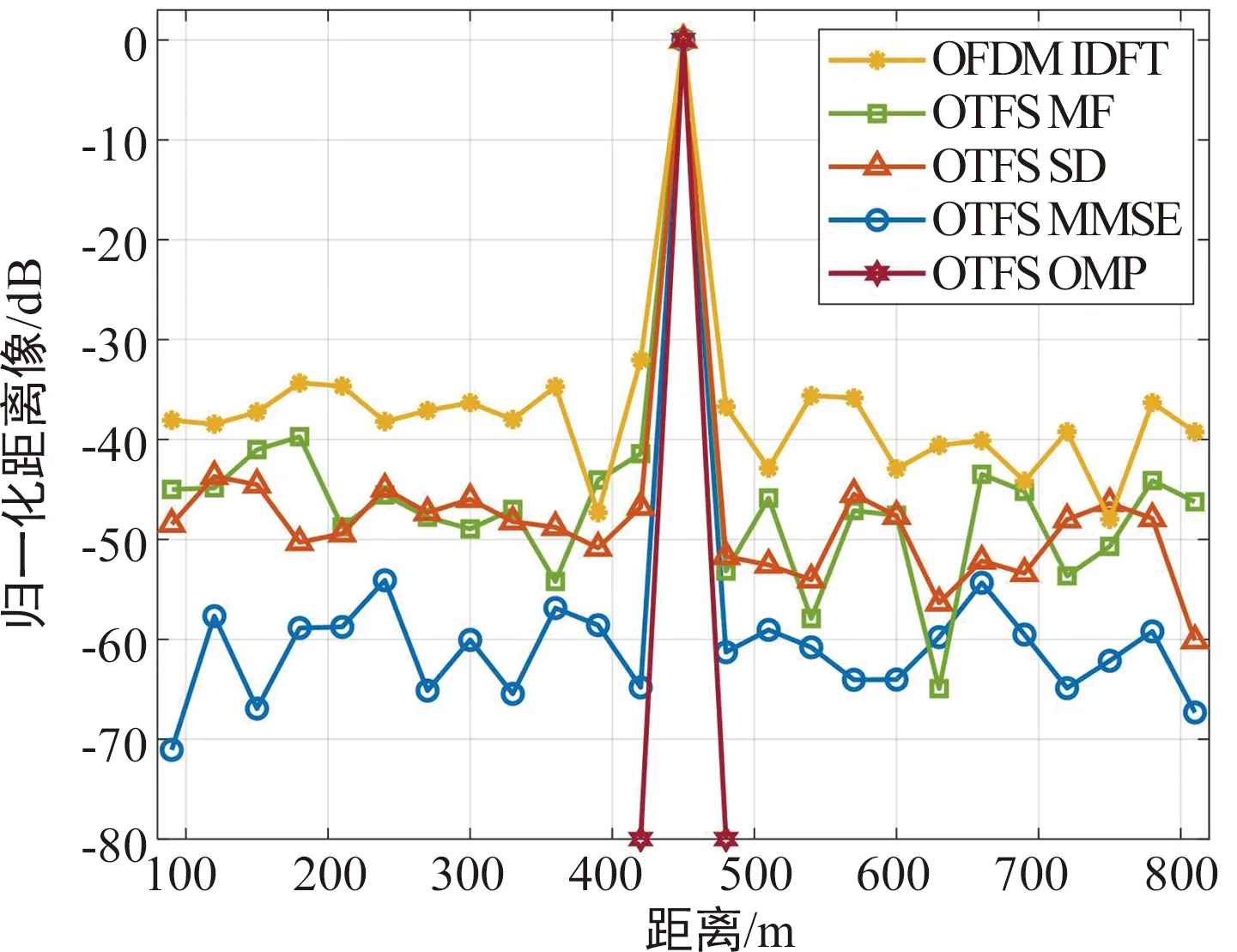
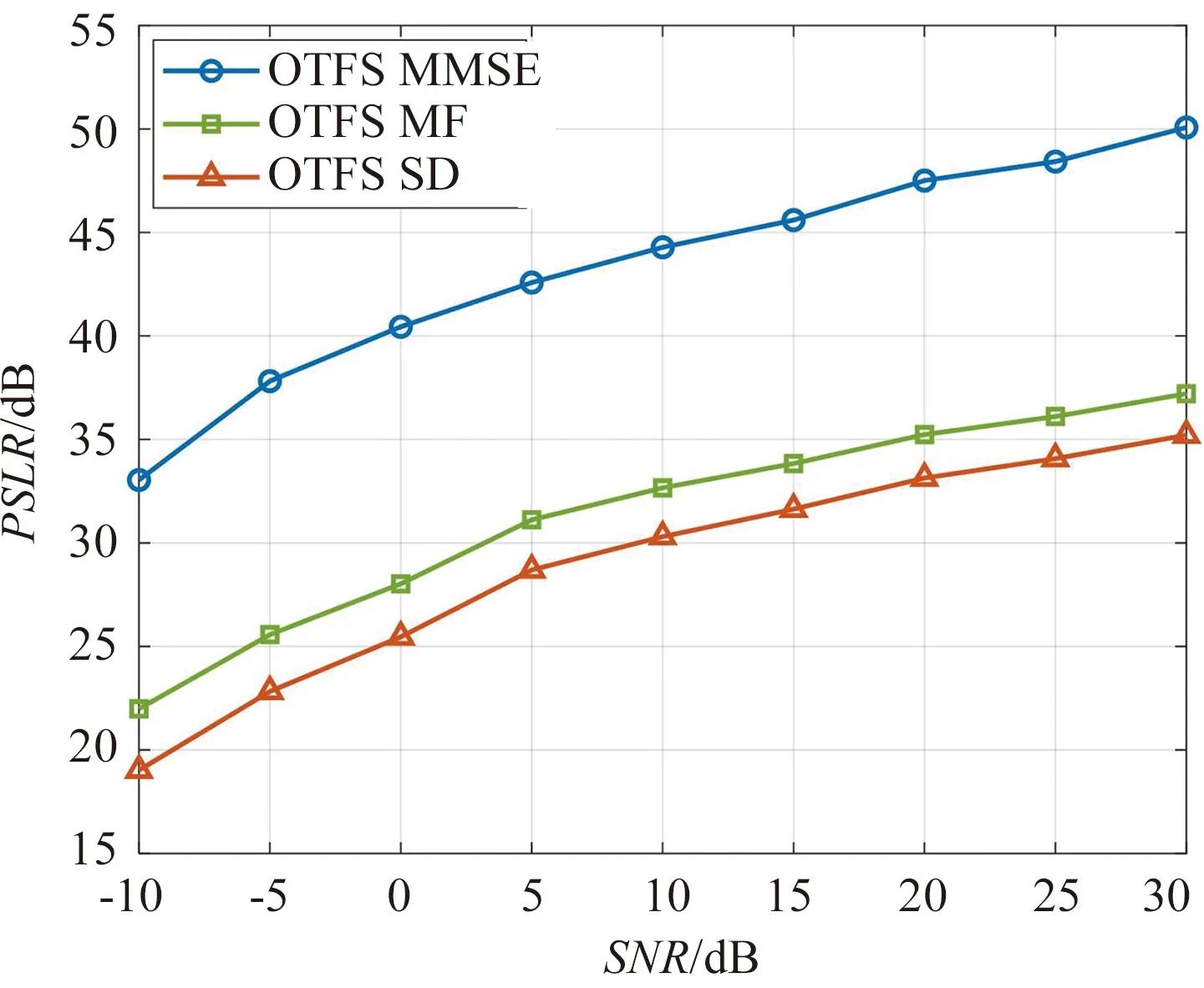
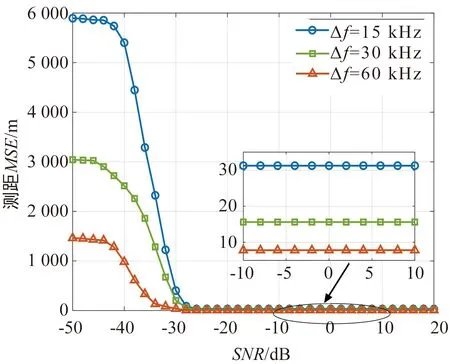
假设采用矩形脉冲成形滤波器rect[t/T],当0≤t 发射机生成上述信号并由接收机接收目标反射的回波信号,该主动感知过程可等效为发射机侧的OTFS通感一体化信号,经由目标决定的雷达感知信道到达接收机处。在通感一体化场景下,雷达感知信道通常考虑点目标模型[22-23],并且雷达感知工作在以视距传输为主的Sub-6GHz、毫米波或太赫兹等高频段,因此本文将发射机与目标间的链路视作单一直射信道。雷达感知信道的特征体现为时间选择性和频率选择性衰落[24],当存在多个目标时信号为多径传输,其中一个目标反射体对应一个路径抽头(tap),而目标运动引起的多普勒效应导致信道时变性。因此本文考虑了一个P-taps时频双选雷达感知信道,其时变脉冲响应建模为[19]: (3) 式中,P表示路径即感知目标的数量,hp为第p个目标的复信道增益(p=0,1,…,P-1),δ(·)为狄利克雷函数。τp和υp分别代表第p个目标的往返时延和多普勒频移,τp=2Rp/c,υp=2Vpfc/c,其中Rp代表第p个目标与发射机的相对距离,Vp代表第p个目标与发射机的相对径向速度,c为光速。因为雷达感知中发射信号经目标反射到接收回波的整个过程将经历往返两次传播,所以相比于通信系统中发端到收端的单程传播,雷达感知信道会经历双倍时延扩展与多普勒频移的影响。为利用DD域信道传输与信号处理的特点,将时频双选雷达感知信道转换至DD域,DD域雷达感知信道脉冲响应h(τ,υ)可由上述时变脉冲响应获得: (4) DD域栅格上的时延分辨率等于时延轴的采样间隔1/(MΔf),多普勒分辨率为1/(NT)。在雷达感知中距离和时延在数值上满足一定的关系,因此不特意区分距离分辨率与时延分辨率,速度分辨率与多普勒分辨率的关系同理。当目标的时延和多普勒均是分辨率的整数倍时,目标位于DD域平面栅格的格点上,即τp=lp/(MΔf),υp=(kp)N/(NT),其中lp和kp分别是时延τp和多普勒频移υp在相应分辨率下的整数索引,即与τp和υp相关的抽头系数。(k)N表示对多普勒域索引进行平移,当N/2 (5) 式中,h[k,l]表示第k个多普勒域和第l个时延域索引处的复信道增益,对应于多普勒频移υ=(k)N/(NT)和时延τ=l(MΔf)。当k=kp且l=lp时,h[k,l]=hp,表示目标p的参数对应于多普勒域索引kp和时延域索引lp。当0≤k≠kp≤N-1且0≤l≠lp≤M-1时,h[k,l]=0,表示该位置处不存在目标。 发送的OTFS通感一体化信号经过DD域雷达感知信道表现为二维卷积的关系[16],故接收机处的接收回波信号rRF(t)可表示为: ej2πυ(t-τ)dτdυ+w(t), (6) 式中,hRF(τ,υ)表示射频等效DD域雷达感知信道,hRF(τ,υ)=h(τ,υ)ej2πfcτ,w(t)为输入接收机的加性高斯白噪声。该式可以解释为接收信号rRF(t)由发送的OTFS通感一体化信号的反射副本叠加获得,其中每个副本都对应于一个感知目标,并经历路径时延τ与多普勒频移υ,且由相应的复值DD域等效信道脉冲响应hRF(τ,υ)加权。 接收机首先对回波信号进行下变频处理,获取时域基带接收信号,即r(t)=rRF(t)e-j2πfct。然后对r(t)进行OTFS解调,先应用魏格纳(Wigner)变换得到TF域接收调制符号矩阵YTF∈N×M: e-j2πmΔf(t-nT)dt, (7) 式中,YTF[n,m]∈YTF表示Λ上的第n个时间域索引和第m个频率域索引格点处的接收调制符号,并且接收端使用相同的矩形脉冲成形滤波器,*表示求复共轭函数。然后采用辛有限傅里叶变换(Symplectic Finite Fourier Transform,SFFT)将YTF反映射得到DD域接收调制符号矩阵YDD∈N×M: YDD[k,l]=SFFT(YTF[n,m])= (8) 式中,YDD[k,l]∈YDD表示Γ上的第k个多普勒域索引和第l个时延域索引格点处的接收调制符号。经过包含以上变换与信号处理流程的发射端调制、雷达感知信道与接收端解调,可获得基带发送调制符号与接收调制符号间的输入输出关系: (9) (10) 由于目标的全部信息蕴藏在回波信号中,接收机通过解调回波得到接收调制符号,从中消除发送符号便可以估计DD域雷达感知信道,从而提取感知目标的参数信息。该雷达感知信号处理的依据是在OTFS通感一体化系统收发同置的框架下,接收机已知解调得到的DD域接收调制符号和发射机原始的发送调制符号,前者是在后者基础上受到雷达感知信道的影响而得到,其中雷达感知信道由目标的时延和多普勒决定。 式(9)显示的输入输出关系与二维循环卷积相似,不同之处在于产生了额外项,这使得DD域感知信道估计变得更加复杂,将该式使用矩阵与向量形式重写为: (11) DD域接收符号向量yDD∈MN×1定义为yDD=vec{YDD},表示将YDD按列优先的方式向量化,即yDD的第k+Nl个元素为YDD[k,l],0≤k+Nl≤MN-1。DD域雷达感知信道向量hDD∈MN×1和噪声向量wDD∈MN×1的第k+Nl个元素分别为h[k,l]和w[k,l]。根据式(11)矩阵相乘的维度关系可知,符号矩阵MN×MN的第i行(0≤i=k+Nl≤MN-1)对应yDD的第k+Nl行,第j列(0≤j=k′+Nl′≤MN-1)对应hDD的第k′+Nl′行,符号矩阵的第i行第j列元素如式(12)所示。 (12) L=E{‖e‖2}=E{eHe}=E{tr[eHe]}=E{tr[eeH]}= E{tr[hDD-GyDD)(hDD-GyDDH]}= E{tr[hDDhDDH+GyDDyDDHGH= -GyDDhDDH-hDDyDDHGH]}。 (13) 因此最小化均方误差损失函数的问题可以表述为: (14) (15) 将损失函数L逐项对G求偏导并令其为零,可得使均方误差最小的加权矩阵GMMSE为: (16) 式中,(·)H表示复共轭转置,Ps为发射OTFS一体化信号的平均功率,IMN表示维度为MN×MN的单位矩阵。因此,基于MMSE准则估计DD域雷达感知信道可归结为求解如下方程组: (17) (18) 在结合Cholesky分解后,只需解两次三角方程组便能获得雷达感知信道估计值,其整体的计算复杂度为O(M2N2),相比原来大大降低。 步骤1:初始化。初始化残差r为r0=yDD,残差能量阈值ε,非零元素位置的索引集合A为空集A0,重建原子集合T为空集T0,迭代次数t=1。 (19) (20) (21) (22) 步骤4:判断迭代是否终止。若残差的能量小于阈值‖rt‖2≤ε,则停止迭代;否则回到步骤2继续执行迭代,并更新迭代次数t=t+1。 本节对所提OTFS通感一体化感知信号处理算法进行数值仿真,以证明该方法在感知性能上的优势,主要的对比方案有MF检测算法[18]、基于SD的感知算法[21]以及OFDM通感一体化调制符号处理算法[9]。仿真中假设目标的复信道增益为1,采用5G系统的28 GHz毫米波作为载波频段,数字调制方式使用4-QAM,蒙特卡洛模拟的次数为100,若无特殊说明信噪比(Signal-to-Noise Ratio,SNR)取10 dB,其余仿真参数如表1所示。 表1 仿真参数 为了对比感知处理算法的目标感知结果,针对感知距离为450 m、速度为85 m/s目标,进行了图2所示的仿真,图2(a)和(b)分别代表目标感知的归一化距离像和速度像,其中距离像和速度像的峰值表示在特定距离和速度处存在目标。由图2可知,当目标的实际距离和速度为感知分辨率的整数倍时,图中各感知处理方法在相同的分辨率下均能够准确感知目标,因为目标参数对应整数时延和多普勒,基本不会带来估计误差;所提基于OMP的OTFS感知处理算法相比于其他算法没有感知噪声,可直接估计出目标位置和雷达感知信道峰值,这是因为该算法求解的是雷达感知信道的稀疏逼近元。并且各感知处理算法具有的PSLR也存在差别,所提基于MMSE准则的OTFS感知处理算法总体PSLR最低,在参数估计时抵抗旁瓣噪声干扰的能力最强,因为其在考虑噪声和信噪比的影响下最小化估计的均方误差。基于MF的OTFS感知不能消除符号间的干扰,基于SD的算法简单地使用时频域信号谱相除忽略了较多因素,而OFDM通感一体化感知处理算法在感知距离和速度时分别使用了IDFT和DFT,故其PSLR将受到傅里叶旁瓣的限制。 (a) 归一化感知目标距离像 图3给出了OTFS通感一体化接收机采用的感知信号处理算法的PSLR与雷达图像信噪比随SNR变化的曲线,目的是对比算法的典型感知性能。由于基于OMP的感知处理只能估计出雷达感知信道的稀疏逼近元,即只能获取感知目标参数及其雷达感知信道峰值,所以没有参与到典型感知性能的对比中。图3(a)中PSLR的定义是主峰与最大旁瓣值之间的比值,图3(b)中雷达感知图像SNR是主峰与平均背景噪声的比值。图3的仿真结果表明,随着SNR的增加,雷达感知PSLR与雷达感知图像信噪比也相应增加,最终达到饱和。这是由于低SNR对应噪声限制区域,噪声功率对于旁瓣值有较大影响,所以PSLR与雷达感知图像信噪比随SNR线性增长,而高SNR时由于调制符号矩阵的相关特性最终将达到饱和。此外,因为PSLR定义中最大旁瓣值为背景噪声的峰值,超过了平均背景噪声,故SNR相同时雷达感知图像SNR高于PSLR。并且在相同SNR条件下与MF和SD感知方法相比,所提基于MMSE准则的OTFS感知处理算法获得的PSLR和雷达感知图像SNR性能有10 dB左右的增益,这是因为所提算法在考虑信噪比和噪声影响的同时进行了最小化均方误差的感知。 (a) PSLR性能对比 为了探究感知信号处理算法在目标感知时测距与测速的均方根误差(Root Mean Square Error,RMSE)随SNR以及子载波间隔的变化情况,进行了如图4所示的仿真。仿真设置一个距离为500 m、速度为32 m/s的目标,其参数均为感知分辨率的分数倍,对应分数时延和多普勒频移。图4的仿真结果表明,测距测速的RMSE随着SNR的增加而逐渐降低,并且当SNR增加到足够大(图中约为-25 dB)时RMSE将收敛于定值,该误差收敛值与感知分辨率相关。因为当系统参数不变时,感知分辨率有限且保持固定,所以在高SNR条件下再提高SNR也很难进一步提升感知精度。随着子载波间隔从15 kHz增加到30 kHz、60 kHz,相同SNR下的测距和测速RMSE分别呈现为降低和增加的趋势。出现该现象是由于子载波间隔增加导致符号周期减小,当子载波数和符号数不变时则带宽变大、时宽变小,故距离分辨率数值减小、速度分辨率数值增大,分别对应更强的距离分辨能力和更差的速度分辨能力。此外,当目标的距离和速度为感知分辨率的分数倍时,OTFS通感一体化接收机侧不同的感知信号处理算法在RMSE性能上并无区别,带来相同的分数移位误差。因为此时感知误差受限于有限的分辨率,而分辨率取决于系统参数配置,算法的处理难以突破该限制。该结论说明除了提高SNR外,选取合适的系统参数是提升感知精度的关键因素。 (a) 测距RMSE随SNR变化趋势 本文针对基于OTFS调制的通感一体化SISO系统中目标感知的问题,在接收机侧提出了基于MMSE准则和基于OMP的感知信号处理算法。所提MMSE感知处理算法在考虑噪声和信噪比的情况下最小化感知的均方误差,实现雷达感知信道的准确估计,而基于OMP的感知处理算法采用原子信号的组合逼近观测值,通过迭代以减小残差实现目标参数的感知。仿真结果表明,所提方法能够准确地感知目标,并相比于已有方案改善了感知性能,证明了该方法的有效性。然而本文只能准确感知参数为分辨率整数倍的目标,因为在雷达感知信道中只考虑了整数时延和多普勒频移,对于分数倍的情况则存在一定的感知误差。因此下一步工作可以考虑对分数倍时延和多普勒下的OTFS雷达感知问题进行研究,扩展至更一般的雷达感知信道。2.2 接收机



3 感知信号处理算法
3.1 最小均方误差参数估计


3.2 正交匹配追踪信号处理



4 仿真结果与讨论
5 结束语