基于二维激光雷达的定日镜清洗车导航避障系统的研究
2023-02-09薛刚强宓霄凌李晓波
薛刚强,宓霄凌,李晓波
(浙江可胜技术股份有限公司,杭州 310053)
0 引言
定日镜作为塔式太阳能热发电站中聚光集热系统的核心部件,其光学效率会直接影响整个电站的性能。由于定日镜运行在户外环境,空气中的粉尘及其他污染物会逐渐堆积在其表面,使其表面的光学反射率下降。因此,必须设计高效的定日镜清洗方式,对定日镜进行周期性清洗,以提升整个电站的发电量。
目前,在世界范围内,已有大量针对已投运塔式太阳能热发电站定日镜清洗方式的研究和试验。西班牙的Sener公司和Torresol Energy公司针对该国已投运的19.9 MW Gemasolar塔式太阳能热发电站的定日镜联合开发了一款智能清洗机器人[1],该机器人被放置在水平镜面上,可自动行走完成清扫。以色列的BrightSource公司针对其2014年2月投运的392 MW Ivanpah塔式太阳能热发电站的定日镜设计了一款基于全球导航卫星系统(GNSS)定位的自动清洗车[2],该清洗车的本体为一台起重机,清洗刷辊通过1根长24.5 m的可伸缩机械臂固定在本体上,在同一个位置可清洗约24.5 m范围内的定日镜,并可通过增加机械臂的长度来减少清洗车在镜场内的行进里程。2015年3月投运的位于美国内华达州的新月沙丘110 MW塔式太阳能热发电站的定日镜清洗时采用的清洗车是在重型车辆本体上搭载水箱,然后由人工操纵定日镜来清洗。
虽然上述清洗方式可实现清洗设备对局部定日镜半自动化清洗导航,但对于整个镜场的定日镜清洗,仍需要人工干预,这主要是由于存在定日镜因故障而转角未到位的工况。浙江可胜技术股份有限公司以德令哈50 MW塔式太阳能热发电站为背景,设计了一款可全自主执行定日镜清洗任务的清洗车。该清洗车通过在本体上搭载清洗水箱,并结合高压喷嘴、刷辊及精密的距离传感器来控制清洗车主动靠近镜面,以完成清洗任务,其结构如图1所示。
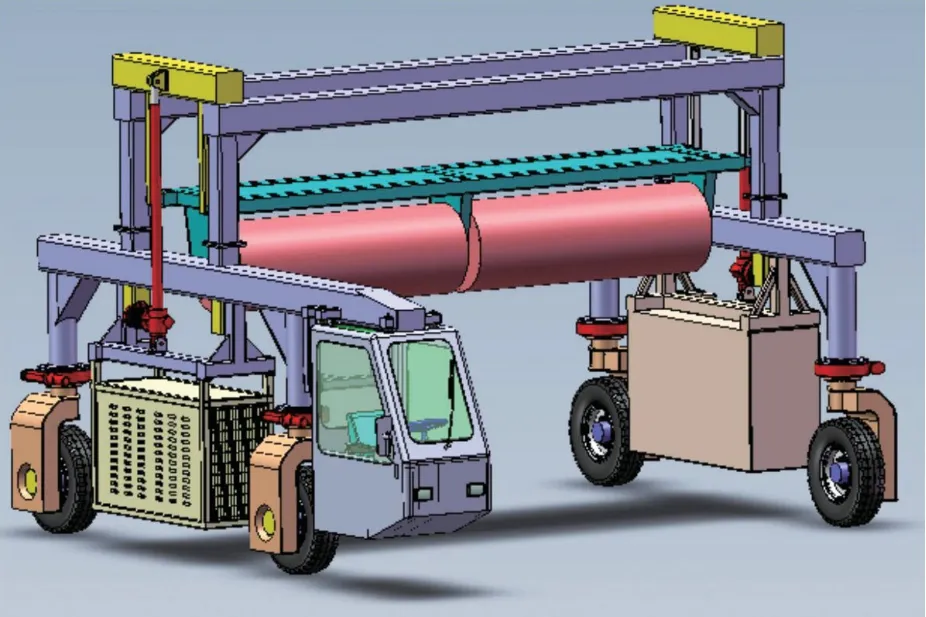
图1 浙江可胜技术股份有限公司设计的定日镜清洗车的结构图Fig. 1 Structure diagram of heliostat cleaning vehicle designed by Cosin Solar Technology Co.,Ltd.
由于该清洗车的行进和清洗任务均是在无人工干预的情况下自主完成的,因此可将清洗任务安排在镜场关场后的非日间时段,避免了日间清洗时因定日镜处于待清洗状态而造成的能量损失,有效提高了镜场的运营效率,降低了运维成本。
由于该清洗车采用跨越式结构设计,其执行清洗任务时需要从水平放置的定日镜镜面上跨过去,因此,定日镜需转角至清洗车需要的清洗姿态。只有当定日镜处于设计的清洗姿态时,清洗车才能正常进行跨越清洗作业而不发生碰撞事故;而当定日镜不处于设计的清洗姿态时,如果清洗车不能检测到这种异常工况,则会发生清洗车与定日镜相撞的事故,轻则造成定日镜镜面玻璃破损,重则造成定日镜反射体不可逆的破坏,甚至清洗车车体都可能因此而被撞毁。对于采用半自动化导航系统的清洗车的驾驶员,除了日常保养、维护清洗车之外,其每天的大部分工作内容是跟车,即跟着清洗车行走,使用人眼观察清洗车是否会和障碍物碰撞,当发生意外情况时,可及时进行紧急制动。很显然,这样的工作内容是对人力资源的极大浪费。因此,亟待研发一套智能避障系统,使定日镜清洗车实现全自动导航,全面解决清洗车驾驶员的跟车任务,解放生产力,同时降低清洗车及太阳能热发电站的整体运维成本。
需要说明的是:任何避障系统都不可能依靠单一设备(比如激光雷达)来达到100%的避障效果。整个避障系统还应该包括红外相机、超声波传感器、拉线开关等其他与激光雷达同级别的子系统。其中:红外相机和激光雷达属于中远距离避障系统;超声波传感器属于近距离制动系统;拉线开关作为接触式制动系统,是整个避障系统的最后一道防线,由于拉线开关的物理性质,决定了其不能经常被触发,否则可能存在因开关老化而制动失灵的风险。
本文提出了一种基于二维激光雷达(下文简称为“激光雷达”)的定日镜清洗车导航避障系统,该系统由清洗车导航系统和激光雷达系统结合而成,利用激光雷达来测量前方定日镜的姿态,并结合清洗车导航系统,从而实现清洗车对定日镜的全自动化清洗。但需要说明的是,并非所有的异常姿态定日镜都需要避障系统来制动,大部分定日镜都具备电机角度反馈功能,当反馈功能正常运行时,镜场控制系统可以检测到异常的定日镜,并通知清洗车导航系统进行制动。避障系统真正要解决的是那些因定日镜存在故障而导致其角度反馈功能异常的情况。比如:大部分定日镜的角度反馈功能在电机侧,当电机驱动和镜体脱离时,就会存在电机空转但镜体不动的故障,而此时,定日镜反馈的角度却是正常的,也就是说定日镜并不知其转角未到位,而本文提出的定日镜清洗车导航避障系统主要用于解决此类问题。
1 WGS84坐标系与西安80坐标系的转换
清洗车的激光雷达检测到前方障碍物后需要将检测到的障碍物的坐标和前方定日镜的坐标在三维直角坐标系内进行对比计算,但由于二者的坐标形式不同,因此需要进行转换。
定日镜的坐标直接取自镜场的坐标序列,其一般由椭球坐标系体现,而在塔式太阳能热发电站范围内,一般可将其放入局部直角坐标系内进行分析。在中国境内,椭球坐标系通常采用西安80坐标系,坐标点一般记为 (x,y,h),其中:x为椭球坐标系的北坐标;y为椭球坐标系的东坐标;h为高程。
常见的3种椭球坐标系的相关参数如表1所示。其中:a为椭球长半轴;b为椭球短半轴;f为椭球扁率;e为第一偏心率;et为第二偏心率。
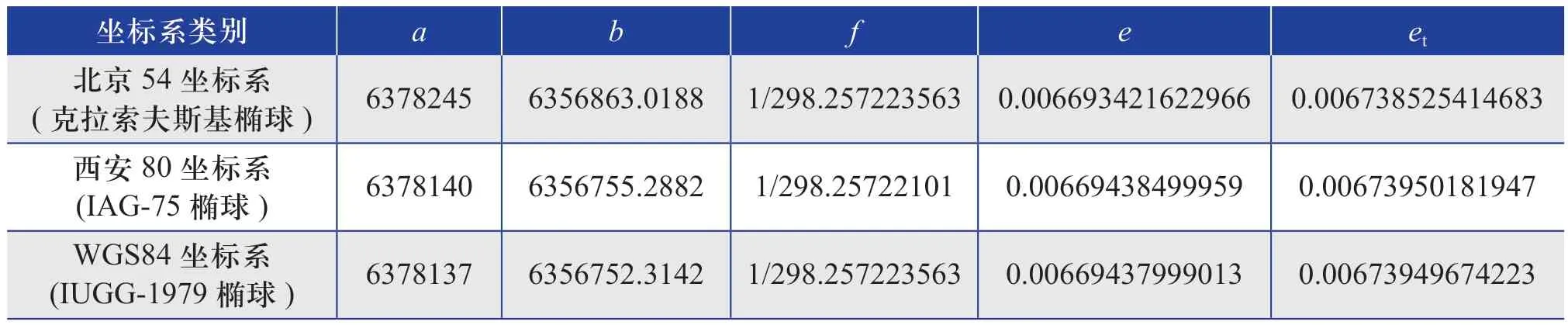
表1 常见的3种椭球坐标系的相关参数Table 1 Relevant parameters of three common ellipsoidal coordinate systems
障碍物坐标的初始形式采用的是激光雷达局部坐标系,根据激光雷达的安装参数可将障碍物坐标转换到以车辆中心为原点的车辆坐标系内,再将车辆中心在镜场坐标系(即“世界坐标系”)中的坐标转换到镜场坐标系。而车辆中心坐标一般是通过采用实时动态载波相位差分(RTK)技术的GNSS设备获取(下文简称为“RTK设备”),其坐标形式为WGS84坐标系的经度与纬度,坐标点一般记为(B,L,H),其中:B为经度;L为纬度;H为经纬度坐标系下的高程,通常H=h。假设WGS84坐标系记为O1、西安80坐标系记为O2,但通常由RTK设备输出的WGS84坐标系O1和西安80坐标系O2根本不是一个椭球坐标系,因此,需要进行转换。完整的转换链为:综上可知,任何一个三维坐标均存在以下两种形式:(x,y,h)和 (B,L,H)。
同一个椭球坐标系内,坐标(B,L,H)转换到(x,y,h)的方法是采用Gauss-Kruger正向投影,具体的转换公式为[3]:
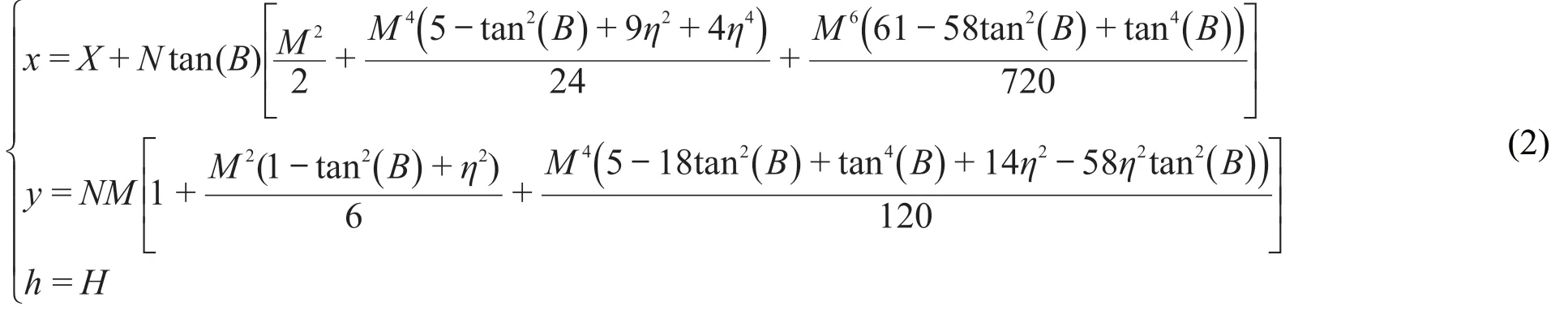
式中:X为子午线弧长。
其中:
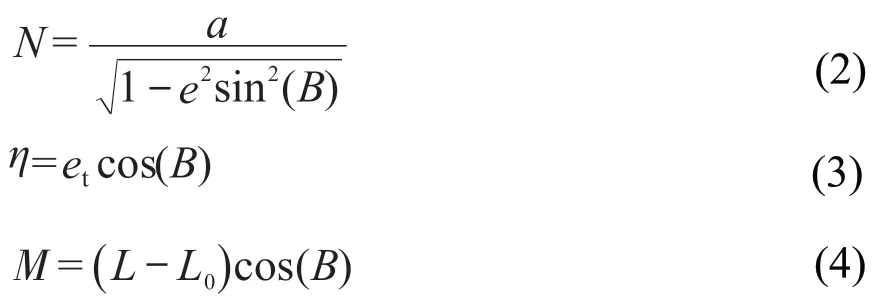
式中:L0为中央子午线经度[1]。
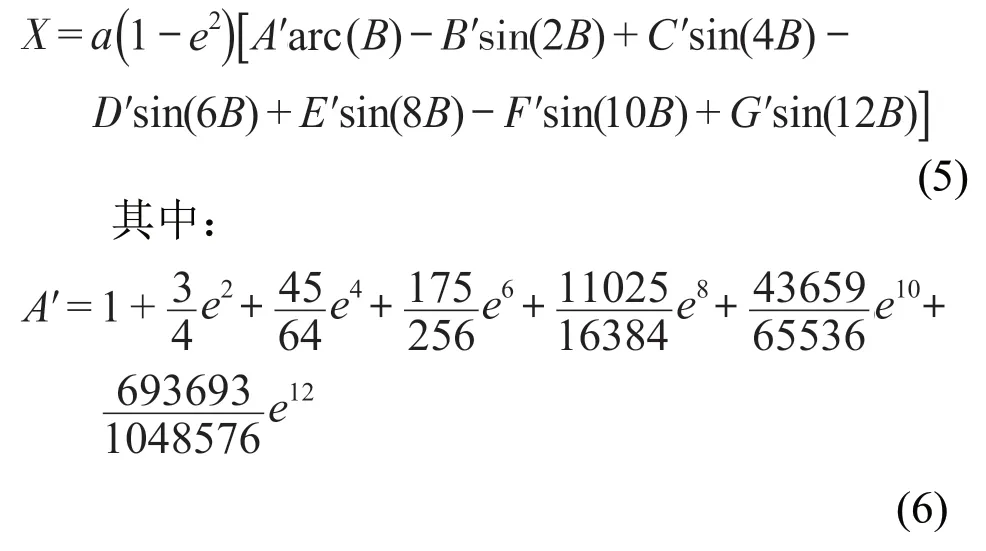

通过式(1)~式(12)实现了将坐标(B,L,H)向(x,y,h)的转换。
需要利用Bursa-Wolf模型将O1(x,y,h)转换到O2(x,y,h)。Bursa-Wolf模型可表示为:

式中:Rx、Ry、Rz分别为绕x、y、z轴旋转的欧拉旋转运算符号;α、β、γ分别为x、y、z轴的旋转角度;m为坐标轴缩放量;BWce为Bursa-Wolf模型的旋转中心点。
采集多个检测点作为标定值,可以完成式(13)中参数的标定。至此,所有从O1(B,L,H)转换到O2(x,y,h)所需的信息都已完备。
2 清洗车导航避障系统检测方案
2.1 清洗车导航避障系统的工作原理
安装有导航避障系统的清洗车在沿着清洗轨迹(图中的黑色虚线)清洗时的俯视图如图2所示。
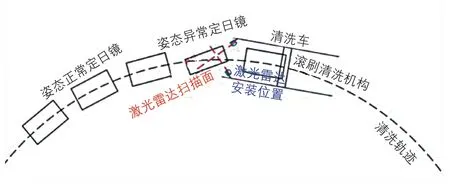
图2 安装有导航避障系统的清洗车在沿着清洗轨迹清洗时的俯视图Fig. 2 Top view of cleaning vehicle equipped with navigation and obstacle avoidance system when cleaning along cleaning track
安装在清洗车前端的激光雷达不断扫描障碍物,并将扫描后获取的数据传输至安装在清洗车上的工控机,工控机中的激光雷达避障系统通过分析来确定哪些扫描点是属于定日镜的,然后将属于定日镜的这些扫描点拟合成一条直线。由于通过安装在清洗车左右两侧的激光雷达扫描障碍物而得到的两条定日镜扫描点拟合线在设计上是必然相交的,激光雷达避障系统将两条拟合线的坐标从激光雷达坐标系转换到镜场坐标系,具体步骤为:1)根据激光雷达安装参数将位于激光雷达坐标系的两条定日镜扫描点拟合线的坐标转换到车辆坐标系;2)将从RTK设备获取的经纬度坐标转换到镜场坐标系。利用上述两条相交的拟合线推算出目标检测平面(即定日镜镜面所在的平面)的法向位置,从而确定被测定日镜的实际倾角。当检测到的定日镜倾角大于预设的倾角阈值上限时,制动清洗车。
安装有导航避障系统的清洗车行驶时,激光雷达扫描过程的仿真图如图3所示。图中:绿色四边形为仿真的定日镜镜面位置,红色和黑色区域均为激光雷达扫描的平面,平面与定日镜镜面形成的截线就是导航避障系统想要提取的结果。
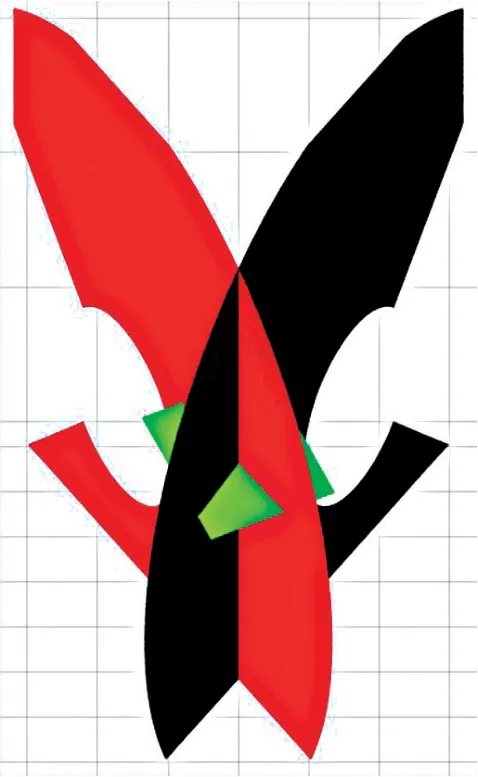
图3 激光雷达扫描过程的仿真图Fig. 3 Simulation diagram of laser radar scanning process
2.2 激光雷达的工作原理及设备选型
2.2.1 工作原理
二维激光雷达可沿其安装平面扫描预设角度范围内的某一区域,并根据该区域内被测物体与扫描仪的相对位置,得到相应的测量数据,这些数据标记为极坐标(θ,r)的形式。其中:θ为被测物体与扫描仪的相对角度;r为被测物体与扫描仪之间的距离。采用飞行时间差(ToF)测量方法时激光雷达的工作原理如图4所示。图中:t为脉冲发送和接收的时间差。
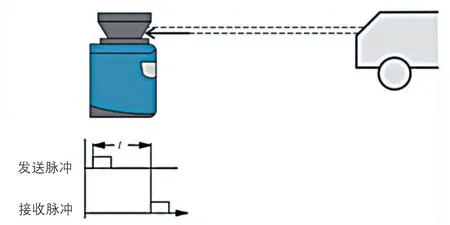
图4 采用ToF测量方法时激光雷达的工作原理Fig. 4 Working principle of laser radar using ToF measurement method
2.2.2 设备选型
本文采用的激光雷达为德国西克(SICK)公司生产的型号为LMS111的激光雷达。LMS1xx系列激光雷达的测量距离和检测角度范围如图5所示。

图5 LMS1xx系列激光雷达的测量距离和检测角度范围Fig. 5 Measuring range and detection angle range of LMS1xx serial laser radar
该激光雷达的检测角度范围为270°,在0.5~18.0 m测量距离内可保证测量结果的精度,最大探测点达20~50 m。上述参数数值基本满足清洗车导航避障系统的需求。
2.3 运动学原理
激光雷达得到的原始测量数据为激光雷达坐标系OL下的坐标,而检测定日镜姿态所需的拟合线需为镜场坐标系OW下的坐标。二者之间的转换关系即本节所阐述的运动学原理。
由于激光雷达坐标系无法直接转换到镜场坐标系下,但激光雷达安装在清洗车上,因此二者之间的转换需要通过清洗车坐标系OV来进行。
2.3.1通用的坐标转换模型
在不拉伸和弯曲的直角坐标系内,假设存在某个坐标点P(x,y,z),其在任意2个直角坐标系O1和O2中的坐标分别为P1和P2,则将P1转换为P2的方式为:

式中:R*i为欧拉旋转的自由组合,i=1, 2, 3,可根据实际的建模方式选择最易调试和理解的模型;T为转换函数;Ce1为P1的旋转中心点。
根据式(14)可得到P2转换为P1的方式为:

假设:TL2V为激光雷达坐标系向清洗车坐标系的转换函数;TV2W为清洗车坐标系向镜场坐标系的转换函数;CL2V为TL2V对应的中心坐标点;CV2W为TV2W对应的中心坐标点。
对于激光雷达坐标系向清洗车坐标系的转换函数,根据激光雷达的实际安装姿态,R*i分别取Rz、Rx、Rz,这样更加符合一般的建模思路。
对于清洗车坐标系向镜场坐标系的转换函数,考虑到清洗车上安装的RTK设备可直接输出航向角Ah、横滚角Ar、俯仰角Ap的值,R*i分别取Rx、Ry、Rz后,可直接得到α=-Ar、β=-Ap、γ=-Ah的对应关系,这显然是最便捷和最直观的建模方案。
综上,任意点P在激光雷达坐标系下的坐标PL和在镜场坐标系下的坐标PW的相互转换关系可表示为:

2.3.2 坐标系的定义
在镜场坐标系下,将正南方向、正东方向、天顶方向分别定义为坐标系x、y、z的3个正方向。
在清洗车坐标系下,将车辆后退方向、车辆正右方向、天顶方向分别定义为坐标系x、y、z的3个正方向。
在激光雷达坐标系下,将激光雷达的0°扫描光线、激光雷达的90°扫描光线、右手系垂直于扫描面方向分别定义为坐标系x、y、z的3个正方向。
2.3.3 运动学参数标定
通过获取激光雷达坐标系向清洗车坐标系转换和清洗车坐标系向镜场坐标系转换涉及到的所有参数,即可实现激光雷达坐标系到镜场坐标系的转换。而将激光雷达坐标系的坐标转换到清洗车坐标系时,可通过截取定日镜在不同姿态下的测量结果,按照运动学模型联立等式,从而求解激光雷达的安装参数,具体方法如下文所述。
对于清洗车坐标系向镜场坐标系的转换而言,CV2W就是RTK设备反馈的镜场坐标系下车辆的中心坐标点,根据上文所述的建模关系,x、y、z轴的旋转角度也可以直接由RTK设备输出的航向角、横滚角、俯仰角换算得到。综上可知,清洗车坐标系向镜场坐标系的转换涉及到的所有参数都是已知的,无需标定。
对于激光雷达坐标系向清洗车坐标系的转换而言,CL2V是激光雷达的安装位置相对于车辆中心的坐标,可以从车辆的结构图纸及激光雷达的实际安装位置得到。激光雷达坐标系向清洗车坐标系转换时涉及到的航向角、横滚角、俯仰角(即x、y、z轴的旋转角度α、β、γ)的取值由RTK设备安装时的精度决定,是导航避障系统中实际需要进行标定的参数。
将清洗车和定日镜放置在几种不同的相对位置关系下,组合定日镜不同的镜面角度,可采集多组定日镜实际姿态和激光雷达反馈的原始数据,用于激光雷达安装角度的标定。
假设:Ah,k为第k个标定的定日镜姿态样本,其同镜场坐标系下的坐标PW序列拟合成一条直线;Ah=L2A(LL,LR)为清洗车上左右两侧的激光雷达拟合得到的直线LL和LR转换到定日镜实际角度的算法。当标定样本个数为p时,激光雷达的标定模型为:
式中:k为第i个定日镜姿态,即车辆位置的第k次标定,k=1,…,p;Lfit为直线拟合函数;PLn为左侧激光雷达的第n个点;PRn为右侧激光雷达的第n个点。
通过数组标定样本,可以拟合得到激光雷达坐标系向清洗车坐标系转换时激光雷达的安装角度值。
综上可知,激光雷达坐标系到镜场坐标系的转换过程已完全确定。
2.4 拟合线算法
本文的拟合线算法采用由Fischler和Bolles提出的随机样本共识(RANSAC)算法,其原理是在集合Pts中随机选取若干个点构成子集S;然后计算余集中误差小于预设值的点的数量,若数量大于预设值,则认为取得一致;若数量小于预设值,则需重新选择子集,并重复上述步骤,直到数量大于预设值。
本文中得到拟合线的具体步骤为:1)在目标点群中随机选择2个点;2)计算过这两个点的直线的公式;3)统计目标点群与这条直线的距离在一定阈值范围内的点的数量;4)多次重复上述步骤,然后选择范围内点数最多的2个点所在的直线作为拟合结果。
由于激光雷达的测量精度较高,定日镜镜面上大部分测量点的波动可控制在5 mm以内(该值根据实际执行经验得到),这也是该算法能在本方案中顺利采用的重要原因。
3 测试结果分析及测试中存在的问题
3.1 测试结果分析
测试前的设备状态为:激光雷达工作正常,清洗车及其导航系统工作正常,镜场控制系统和与测试相关的定日镜工作正常。测试条件为:环境风速不超过定日镜工作风速,无大雨、大雪等极端天气。测试地点为:青海省海西州德令哈市50MW塔式太阳能热发电项目(二期)所在地。激光雷达设备现场安装后的照片和清洗车导航避障系统的现场测试照片分别如图6、图7所示。图7中的红圈为激光雷达设备安装位置。
图6 激光雷达设备现场安装后的照片Fig. 6 Photo of laser radar equipment after on-site installation

图7 清洗车导航避障系统的现场测试照片Fig. 7 Field test photo of navigation and obstacle avoidance system of cleaning vehicle
实测得到的典型帧测量数据在激光雷达坐标系下的结果如图8所示。图中:蓝色和黑色分别表示左右侧激光雷达的测量数据;空心圆点为标定参数下仿真检测到的镜面位置;实心圆点为非检测范围内(地面、天空等)的扫描点;棱形点为检测范围内的扫描点;虚线为根据棱形点拟合的直线。
对于图8而言,当定日镜姿态没有异常时,虚线和空心圆点形成的直线越接近,说明标定参数越准确。当清洗车实际运行时,通过观察虚线和空心圆点形成的直线的接近程度可以推测定日镜的转角异常情况。
当定日镜姿态明显为异常姿态 (定日镜高度角大于20°)时,导航避障系统能够非常容易检出,并触发制动;但当定日镜姿态和正常姿态较为接近时,检测难度相对较大。对异常姿态非常接近正常姿态的定日镜测试结果进行统计,具体如表2所示。表中:电机角度指控制系统从定日镜电机编码器处读取的角度。区别于定日镜实际姿态,电机角度以电机零位为标准,例如定日镜存在2°的高度角初始安装偏差时,电机角度为3°,则定日镜的实际倾角为5°。对于跨越式清洗车,在设备无安装偏差的情况下,当保持定日镜的水平角不动,即使方位角旋转180°,定日镜的姿态未发生改变,仍然处于清洗姿态。
表2 异常姿态接近正常姿态的定日镜的测试结果Table 2 Test results of heliostat with abnormal attitude close to normal attitude
从表2可以看出:当电机角度为正向9°工况下,所有定日镜都能触发制动;当电机角度为正向6°时,只有1面定日镜触发制动;而电机角度为反向6°时,所有定日镜都能触发制动。同时,根据导航避障系统提示的检测值,电机角度为正向6°时,未触发制动的3面定日镜,导航避障系统识别结果为3°~4°;而电机角度为反向6°时,识别结果为8°~9°。由上述现象可知,电机角度为正向6°时,3面未触发制动的定日镜是由于存在初始-2°~-3°的安装偏角所导致,当真实定日镜姿态大于6°时,则可以触发制动。
3.2 测试过程中存在的问题
3.2.1 误检测问题
清洗车在启用导航避障系统后,于2020年11月23日~12月8日期间进行测试,由于11月28日和12月1日存在天气(如下雨)等影响因素,清洗车未作业,导致这两天无相关测试数据。根据14天的跟踪测试结果,日均误报次数为3.2次,需要人工确认后才会自动恢复到导航模式。清洗车一天清洗的定日镜数量在1000面左右,相当于误报率为0.32%。若目标是导航避障系统每日或数日只发生1次误报,则需进一步将误报率优化到0.1%以下。测试期间导航避障系统的误报次数统计如表3所示。
表3 测试期间导航避障系统的误报次数统计Table 3 Statistics of number of false positives of navigation obstacle avoidance system during the test
3.2.2 定日镜镜面问题
在测试过程中发现,当定日镜镜面玻璃极为干净,且镜面法向完全和激光雷达扫描面垂直时,激光雷达不能很好地反射测量结果,这是由激光雷达设备的基本特性决定的,暂时无法解决。这种工况下,目前只能由红外相机等其他避障子系统进行检测。由于清洗任务调度模块一般会优先安排清洗车清洗清洁度较差的定日镜,所以定日镜镜面极为干净的工况在非测试条件下的实际工程项目中遇到的概率较低。
4 结论
本文提出了一种基于二维激光雷达的定日镜清洗车导航避障系统,并在50 MW塔式太阳能热发电项目上实测投用。测试结果显示:定日镜电机角度超过6°时,定日镜都可以触发制动;在14天的测试周期内,导航避障系统的日均误报次数为3.2次。初步达到可检测异常定日镜且误报次数在可接受范围内的要求。
经分析发现,导航避障系统的测量精度敏感性和激光雷达的安装角度有关,当扫描面完全垂直于车辆行进方向时,激光雷达对镜面水平倾角变化最为敏感,但扫描距离最短,只有当激光雷达抵达待检测镜面下方时才能获取检测结果;当扫描面和车辆行进方向完全平行时,测量距离最远,但测量精度敏感性最差。如何在测量精度敏感性和测量距离之间取得平衡,需要根据现场的长期测试结果进行综合评估。
