基于联合仿真的纯电动客车制动控制策略对比分析与优化
2023-02-08张景玲周梦来胡荣俊周广波
张景玲,周梦来,胡荣俊,周广波
(扬州亚星客车股份有限公司 汽车研究院,江苏 扬州 225000)
随着中国能源安全和环境污染问题日益突出,纯电动客车已成为客车发展的重点方向[1]。但与传统燃油车相比,纯电动客车的研发一直面临着续航里程短的技术瓶颈。制动能量回收是提升纯电动客车续航里程的重要手段,研究分析及优化不同制动控制策略对纯电动汽车的影响,对提升其续航里程有着重要的意义。目前,部分学者已对制动能量管理进行了大量研究[2]。张卫等通过对制动力学和制动法规研究分析,获得了前、后轮制动力分配控制可行域,建立了再生制动优先控制模型[3];周海林等结合电机驱动与制动原理,提出了合理的再生制动方法,建立了最大化制动力分配策略[4]。杨坤等提出了分段式ABS电磁阀调压模型,并基于Matlab/Simulink/Stateflow和AVL Cruise搭建了联合仿真平台[5]。现有的研究大部分基于模型的搭建、策略的优化升级及仿真分析,而针对实际使用情况时的验证分析还较少涉及。本文首先针对纯电动客车串联式和并联式制动两种不同的控制策略,使用Matlab/Simulink与AVL Cruise进行联合仿真,并对比分析相同工况下的仿真结果。接着根据实际使用情况,采用实际公交车路谱,并在控制策略中引入电机扭矩map的计算方法,最后与监控平台的数据对比,验证模型的准确性。
1 串并联制动控制策略及仿真对比
1.1 串并联制动控制策略
纯电动客车制动能量回收功能是指通过设定的控制策略,采用电制动的方法将部分动能转化为电能,并反向存储至电池包中,如果后续整车有能量需求,则将储存的能量释放出来,通过此过程能实现能量的再次利用[6]。
制动能量回收系统可分为两种类型,即并联型和串联型[7]。在并联式制动系统中,机械制动力一直存在,而系统根据制动需求在机械制动力的基础上叠加电制动力。因此并联式制动系统简单高效,直接把电制动力叠加到传统机械制动上,不需要对机械制动进行改进,同时也能保证制动性能[8]。但是该制动系统效率偏低,制动过程中还会引起驾驶员的不适感[9]。在本文中,串并联式制动控制模型采用Matlab/Simulink搭建。在并联式制动模型中,考虑到实际使用情况设置了机械制动空行程,即在计算整车机械制动扭矩时设置踏板开度的前30%不制动,具体如图1所示。电制动与机械制动相互独立,电制动的计算如式(1)所示。
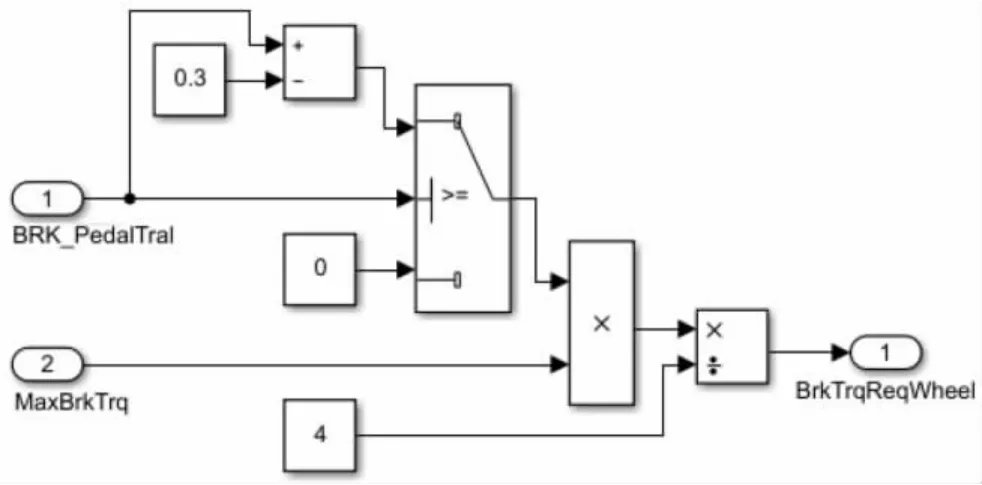
图1 并联式制动系统中机械制动扭矩的计算

式中:BRK_PedalTral——制动踏板开度;MaxTrq-Gen——最大回收扭矩;Speed_Coff_eBrk——速度修正系数;SOC_Coff_eBrk——SOC修正系数。
串联式制动系统则是优先考虑使用电制动力,在制动需求达到一定值后,机械制动同时介入,两种制动力相互协调达到系统总制动需求[10]。串联式制动系统有较高的再生制动效率,同时安全性和平顺性较好,但是制动控制逻辑复杂,需要对机械制动进行改造[11]。当车辆处于串联式制动策略时,首先计算制动力需求,接着判断电制动是否满足制动力需求,若满足则采用电制动,不满足则优先采用电制动,剩余制动力需求由机械制动补足[12]。具体步骤如下。
1)首先计算整车制动需求扭矩。将整车制动踏板开度转化为制动扭矩需求,并计算出当前状态下的电机端电制动扭矩需求,计算过程如式(2)所示。

式中:BrkTrqReqWheel——轮端制动扭矩需求;MaxBrkTrq——最大制动扭矩;TrqReqMot——电机端制动扭矩需求;TransRatio——速比;TransEfficiency——传动效率。
2)接着计算电制动扭矩,计算过程如图2所示。取电机端制动扭矩需求与电机最大制动扭矩两者中的最小值,由于编程中回收扭矩为负值,所以编程中用max函数取两者绝对值中的最小值。

图2 串联制动系统中电制动扭矩计算
3)最后计算机械制动力,计算过程如式(3)所示。

式中:BrkTrqReqWheel——轮端制动扭矩需求;eBrk-TrqWheel——轮端电制动扭矩。
1.2 串并联制动系统仿真对比
为比较并联式制动系统与串联式制动系统的性能,本文就一辆8.5m纯电动客车进行Simulink与Cruise联合仿真分析,整车参数见表1。将制动控制策略的Simulink文件转化为dll文件格式,在Cruise模型中导入该制动策略文件,联合仿真界面如图3所示。

表1 整车参数
图3 Simulink与Cruise联合仿真
CHTC-B是中国普遍采用的一种城市客车工况,循环工况图如图4所示。在该工况下,在上述8.5m纯电动客车采用制定的并联式制动策略与串联式制动策略分别进行仿真分析,可得到该客车在CHTC-B工况下SOC值的变化曲线(图5),能耗数值如表2所示,电机扭矩变化如图6所示。

图4 CHTC-B循环工况
从图5和表2中可以看出,在CHTC-B工况下,相对于串联式制动系统,并联式制动系统下SOC值下降较快,能耗值较高。图6中串联式制动系统的回收扭矩也大于并联式制动系统,因此上述结果表明串联式制动系统的回收效率要高于并联式制动系统。

图6 CHTC-B工况下两种制动策略电机扭矩变化

表2 CHTC-B工况下两种制动策略的能耗值

图5 CHTC-B工况下两种制动策略SOC值的变化
2 实际路谱仿真与监控数据对比
2.1 公交路谱下仿真与监控数据对比
为了验证模型的准确性,对比分析公交路谱的仿真结果与监控平台数据,车型依然采用上述8.5m纯电动客车。由于公交车的线路都是固定的循坏路线,因此通过分析车辆监控平台数据可以对一辆公交车一天的行驶工况进行统计分析,进而做出实际路谱,如图7所示。
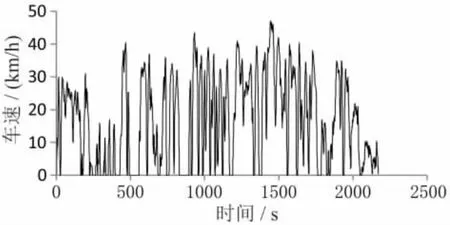
图7 实际路谱
实际车型采用的是并联式制动控制策略,同时根据实际使用情况在原并联式控制策略中调整制动和加速时电机扭矩的计算方法,即采用标定的油门/制动踏板开度-车速-电机扭矩map形式,如图8所示。
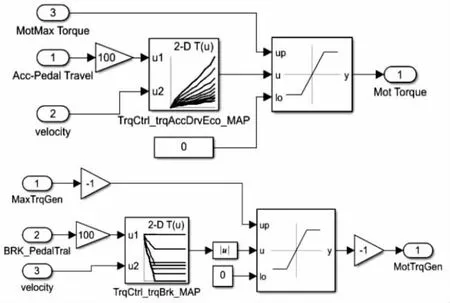
图8 并联式制动控制中加速、制动时电机扭矩的计算
考虑到车辆的附件能耗,仿真会与实际相差较大,因此为了验证模型的准确性,不考虑附件,将仿真得到的踏板开度及电机扭矩结果与实际车辆在监控平台中对应的数据进行对比,如图9、10所示。从图9和图10中可以看出,采用电机map的并联式制动仿真与实际数据有一定的误差。为了验证该方法的误差相对较小,也采用了之前的非map并联式控制策略进行对比,即不用电机map而采用踏板开度和扭矩直接相乘的形式,并将相同公交路谱下的仿真结果与实际数据进行了对比,如图11、12所示。两种并联式控制策略的仿真能耗对比结果如表3所示。
从图9和图11对比可知,两种并联式制动踏板开度的结果都具有一定的误差。对比图10和图12发现,图10中map并联式控制策略模型通过采用标定的电机map,能使电机的扭矩控制在1500Nm以内,减少了与实际电机扭矩的误差,与图12中非map并联式控制仿真结果相比,效果更佳,误差更小。同时,表3中两种并联制动策略的能耗仿真,也表明通过使用map并联式控制策略,能有效降低能耗。

表3 公交路谱下两种制动策略的仿真能耗值

图9 map并联式:仿真制动踏板开度与平台数据对比
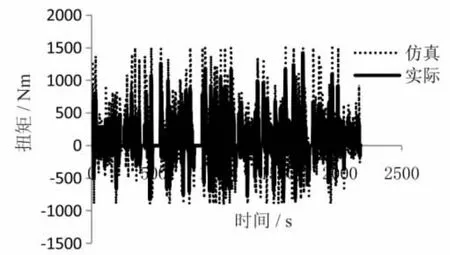
图10 map并联式:仿真电机扭矩与平台数据对比
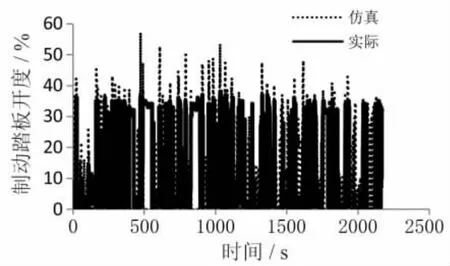
图11 非map并联式:仿真制动踏板开度与平台数据对比
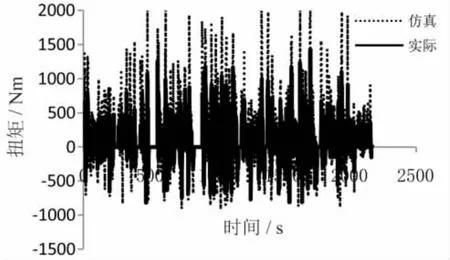
图12 非map并联式:仿真电机扭矩与平台数据对比
2.2 等速实验工况下仿真与测试数据对比
为了进一步验证模型的准确性,在等速40km/h工况下,依旧用map并联式制动进行仿真,并与实验场测试数据对比。另选取一辆8.1m的纯电动公交车,其在等速40km/h路谱仿真时,仿真结果显示电机扭矩稳定在95.8655Nm。实验场等速40km/h的路谱测试数据如图13所示。在图13中,选取虚线框中较为稳定的一段,计算其平均值为96.2Nm,与仿真结果十分接近,因此进一步证明了模型的准确性。

图13 等速40km/h实验测试结果
3 结束语
本文通过研究串并联式制动控制策略,使用Matlab/Simulink与AVL Cruise联合仿真分析,得出串联式制动控制策略相对于并联式制动控制策略的SOC值较高,能耗较低,效率更高的结论。同时,根据实际使用情况,改进并联式制动控制策略,在其中引入标定的电机map,与监控平台数据对比,发现map并联式制动与实际平台数据更接近,更贴合实际,而且能耗相较于非map并联控制策略更低。最后,采用等速40km/h路谱进行仿真与实验测试结果对比,进一步验证了模型的准确性。
