基于PreScan的智能网联测试环境搭建与仿真
2023-02-08赵一凡孟祥虎
崔 振,赵一凡,孟祥虎
(徐州徐工汽车制造有限公司,江苏 徐州 212000)
0 引 言
随着经济和社会的快速发展,人们对汽车的功能要求日益提升。近些年,随着智能网联汽车技术的发展,高级驾驶辅助和自动驾驶成为各大主机厂和科研院所的研究热点[1-5]。而传统的实车测试局限性太大,测试里程和测试周期长、场景复杂且危险场景难以复现、测试效率低下,因此虚拟仿真显得尤为重要。PreScan仿真平台、仿真环境模型易于搭建,可操作性强,自定义程度较高,已被广泛应用于高级驾驶辅助(ADAS)和自动驾驶技术开发与测试中[6-8]。
1 测试环境搭建思路
基于PreScan仿真平台可以搭建环境和建筑物模型,设置车辆动力学参数,开发基于雷达、摄像头等传感器的自动驾驶系统,并通过PreScan和MATLAB/Simulink的耦合来完成车辆控制,实现数据可视化、仿真环境可视化等。
2 测试园区仿真场景搭建
2.1 道路模型搭建
通过PreScan搭建仿真场景过程中,道路和建筑物模型搭建以及参数设置是虚拟场景仿真的基础。道路要依据现实场景进行搭建,根据采集的路况信息和实际情况进行道路、车道线、路面标志以及交通信号灯指示牌等模型搭建。
根据实际情况将道路属性设置为:车道数为3,车道宽度为3 m,路面厚度为0.1 m,道路方向和长度以及位置信息根据实际情况而定。设置道路位置信息时根据两点确定整个虚拟环境 的坐标系,通过RTK测试得到A、B两个路口的实际经纬度坐标为Lat: N 34°10′24.12′′,Lon : E 117°13′18.6′′和 Lat: N 34°10′24.94′′,Lon : E 117°13′27.2′′。将 A、B两个路口的经纬度坐标按照实际值设置完成后,可以得到其在PreScan GUI中的屏幕坐标,根据屏幕坐标计算出道路倾斜度为6.64321925°,且与实际道路一致。
2.2 外部建筑物模型搭建
为了提高场景环境的真实度,需要建筑物模型更接近现实场景,利用软件Sketchup进行建筑物模型搭建,完成后通过PreScan中工具(MPT)箱进行参数调整,并导出PreScan需求的.pgmb格式,然后导入到PreScan模型库中。由于建筑物建模工作量大,可以在Sketchup自带的3D模型库的基础上进行修改。
根据实际环境,以厂区内部实际道路进行建模,首先确定实际道路尺寸、车道数以及路面标志等,根据GPS坐标信息设置标志点的经纬度坐标,将每个点与实际位置进行匹配。最终建成了与实际三维尺寸一致的厂区建筑物模型虚拟环境。如图1所示,展示了GUI中搭建的测试园区内部主干道和建筑物仿真场景,进行了VieViewer可视化场景与实际场景的对比。

图1 仿真环境与真实环境
PreScanGUI在车辆模型的Object configuration中给出了车辆详细的属性参数,在进行纵向控制仿真时一般采用简单的2D模型,根据实际需求设置最大制动压力、车身质量、轴距、轮胎半径、质心位置等参数,更多详细参数如发动机动力曲线和变速箱换挡逻辑,在PreScan MPT工具箱中可以详细设置。
3 PreScan与Simulink联合仿真
3.1 自动驾驶循迹运动控制
自动驾驶循迹运动控制是自动驾驶中最常用到的功能,可以使车辆实现沿着给定路线自动行驶,在无人码头港口、矿区等特定封闭场景下具有很大的应用空间[9-10]。在PreScanGUI中对车辆添加运动轨迹,或者导入运动轨迹文件,设置车辆运动学模型参数,给定车辆参考质量、初始速度、最大加速度、最大制动压力等参数,设置车辆在轨迹上的速度限制。在Simulink仿真控制平台中,可以通过车辆自身动力学模型输出测试园区轨迹和测试园区任一点GPS坐标和屏幕坐标。如图2所示为车辆在测试园区内的运动轨迹。
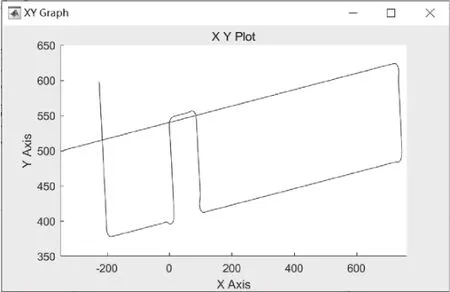
图2 车辆运动轨迹
从图2可以看出,车辆在循迹运动过程中根据预设轨迹进行运动,在道路弯道转向处由于速度较高会导致实际运动轨迹存在一定的过度转向,与实际驾驶体验一致。
3.2 自动刹车辅助系统(AEB)仿真
自动刹车辅助系统主要利用Radar传感器识别前方物体类型、行人或车辆移动速度、航向角、障碍物与本车距离等。自动刹车辅助系统通过Radar毫米波雷达探测到数据,并在Simulink控制平台中进行处理;通过控制车辆动力学模型的油门开度和刹车力度对车辆进行纵向控制,使车辆在识别到前方障碍物的类型和速度后能够进行主动避让,且不会影响车辆行驶。
搭建PreScan与Simulink的联合仿真模型,通过State flow状态机实现状态迁移,利用Ladar传感器检测到车距、障碍物类型和前方紧急刹车安全距离三者并进行纵向控制。State flow模块输入量为前方障碍物类型、速度、距离、刹车力度、预警速降和安全距离。
当前方为静止物体时的安全距离根据当前车辆瞬时车速和自车最大减速度设置,设置最小间距为2 m的情况下,搭建安全距离模型[4],公式如下:

其中:dbr为安全距离;Vins为本车检测到物体时的瞬时车速;t0为制动器延迟时间,为0.1 s;d0为最小间距,为2 m;a为本车最大减速度。
当前方为动态目标时,可根据公式(2)的安全距离表达式搭建Simulink算法模块。
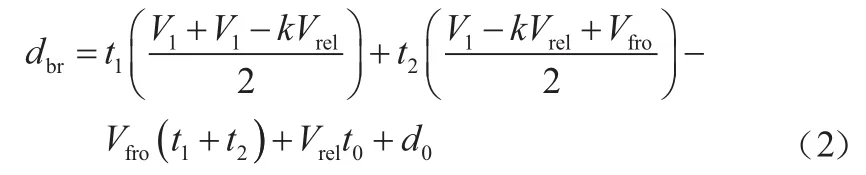
其中:dbr为安全距离;V1为本车初始车速;V2为紧急制动阶段的初始速度(速降为初始速度差的30%);Vfro为前车车速;Vrel为相对车速;t1为预警时间,为1.5 s;t2为柔和制动时间,为3 s;t0为制动器延迟时间,为0.1 s;k为速降系数,V1>50时k为0.3,V1<50时k为0.2;d0为最小间距,为2 m。由此可得:

图3展示了自车初始速度为60 km/h、前车初始速度为10 km/h时自车速度变化曲线。可以看出:第一阶段为预警减速阶段,减速度较小,属于柔和制动阶段;第二阶段以较大减速度减速到与前车速度保持一致,可有效避免车辆碰撞危险。
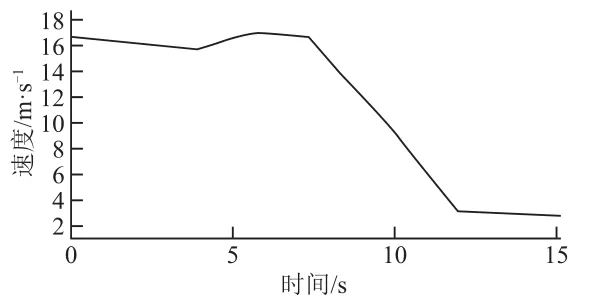
图3 自车速度变化曲线
4 结 语
本文搭建了基于PreScan的虚拟仿真平台,包含道路、车道线、红绿灯、路侧建筑等场景要素,得到了与实际测试场景一致的测试环境,并用于自动驾驶循迹控制仿真,验证了研究方法的可行性与有效性。结合PreScan与Simulink建立了自动紧急制动系统(AEB)的控制模型,并验证了控制策略的有效性,可以用于后续的仿真测试研究,加快技术开发与迭代速度。