考虑失稳风险的智能车辆换道避障危险评估方法研究
2023-02-08姚鸣杰张缓缓
姚鸣杰,张缓缓,杨 博
(上海工程技术大学 机械与汽车工程学院,上海 201620)
0 引言
危险评估是智能车辆自动驾驶系统的关键环节。在避障问题中,危险评估直接影响了智能车辆的行驶安全性。危险评估的方法主要分为基于状态量的危险评估、基于驾驶意图预测的危险评估和基于交互式的危险评估等。Zhang Y[1]将两车间距与两车相对纵向车速的比值作为安全距离指标,达到纵向避撞的效果;裴晓飞[2]以碰撞时间倒数(TTC)作为评价指标,设计的安全距离模型大大增强了主动避撞的效果;Käfer[3]通过在驾驶员模型中设定较高的避障意图的方法,进行危险评估;Yoo[4]基于博弈的思想建立了交通车碰撞模型,并根据所收集的驾驶员安全确信度数据,建立了一种拟人化的危险评估方法;边明远[5]采用正弦函数加速度曲线作为避障轨迹进行危险评估;Aoude[6]通过蒙特卡洛采样的方法预测碰撞概率,并对概率进行分级,设计了危险评估策略。
本文采用七次多项式作为换道避障的轨迹,确保车辆换道轨迹的平滑;基于七次多项式轨迹对车辆横摆角速度进行约束,在考虑智能车辆碰撞风险的基础上设计了一种同时考虑失稳风险的危险评估模型;经仿真分析,验证了所设计的危险评估方法可以有效提高智能车辆换道避障的安全性。
1 换道轨迹规划
设车辆换道的初始坐标为原点坐标 (x0,y0),终点坐标为 (xt,yt),将换道轨迹用横向与纵向位移的七次多项式曲线表示,式(1)[7]:

表达为矩阵形式,式(2):

其中,

对式(1)求导,可以得到车辆速度、加速度与加速度变化率表达式,式(3):
根据车辆初始状态与终点状态的运动学约束,可以得到约束条件关系式,式(4):

由x0=0,可得系数向量
最终,车辆换道轨迹曲线可由七次多项式方程表达,式(5):
由七次多项式方程所得到的车辆换道避障轨迹示意图如图1 所示。
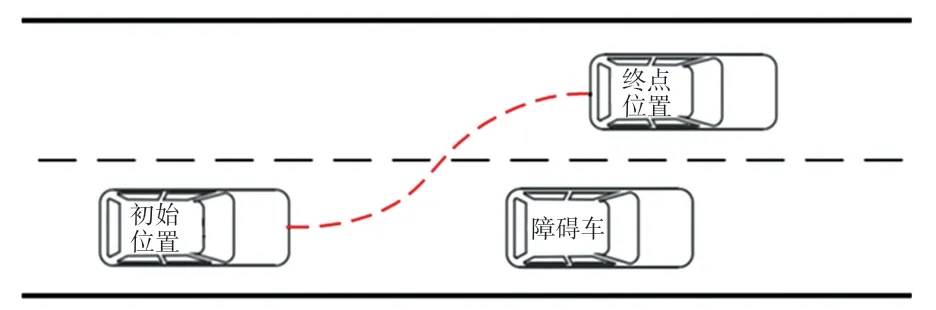
图1 换道避障轨迹示意图Fig.1 Schematic diagram of lane -change obstacle avoidance trajectory
2 危险评估模型建立
在智能车辆换道避障前进行有效的危险评估,可以确保智能车辆预测和评估风险,以采取恰当的换道时机,提高换道避障的安全性,本文结合车辆换道轨迹和车辆横摆角速度约束,建立了考虑失稳风险的危险评估模型。首先,根据车辆动力学原理,可知车辆侧向速度与纵向速度的关系式(6):

其中,vx为纵向车速;vy为侧向车速;β为质心侧偏角。
车辆质心的侧向加速度为ay,式(7):

其中,γ为横摆角速度。
将式(6)带入式(7),可以得到侧向加速度,式(8):

由式(8),可以得到受质心侧偏角影响的侧向加速度,式(9):
车辆侧向加速度与路面附着条件的关系式可以表达为式(10):

其中,μ为路面附着系数,g为重力加速度。
根据式(10),可定义关系式(11):

其中,kβ为动力学因子,且0<kβ <1。
将式(11)带入式(10),可以推导出式(12):

理想的车辆横摆角速度应满足表达式(13):
将式(5)与式(13)联立,可将车辆的理想横摆角速度表示为式(14):
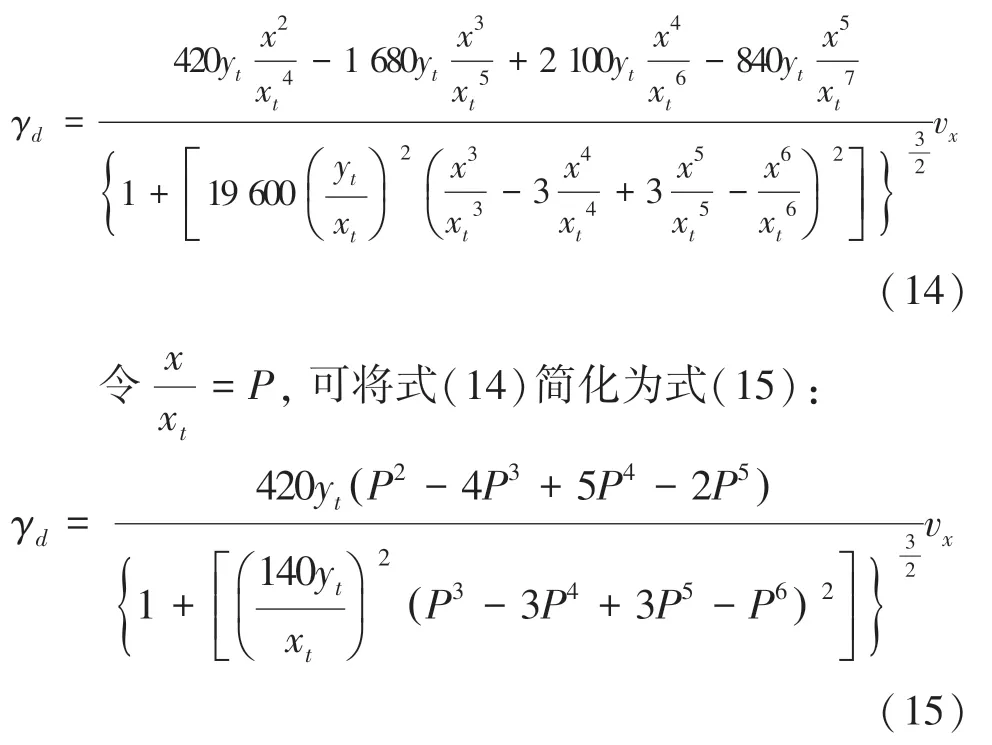
由式(15)可知,当P =0.3 时,车辆的理想横摆角速度γd能够取得最大值,即式(16):
根据车辆动力学约束条件,可将式(12)表达为不等式关系(17):

联合式(16)和式(17),即可推导得出危险评估函数式(18):
为了保证危险评估模型在换道避障时的实时性,还需要考虑障碍物与自车之间的实时距离。根据距离的比例关系,定义关系式(19):

其中,m和n为比例系数,且m >0,n >0。
联合式(5)和式(20),可以推导出公式(20):

将式(19)和式(20)带入式(18),可推导出新的危险评估函数,式(21):
其中,yd和xd分别为自车与障碍物间的横向及纵向间距,考虑车辆和车道宽度,设定yd =2.2 m。
根据式(19),将动力学因子、路面附着系数和纵向车速看作常数,将比例系数n和纵向车间距xd作为变量,并且令fc(·)=0,可知当n≈2.2 时,纵向车间距最小,而根据式(20),容易求得当n =2 时,m=2。因此,为简化危险评估函数,令n =2,可将式(21)整理为:
不同路面附着系数下纵向车速和纵向车间距对危险评估模型的影响如图2 所示,可以观察到危险评估因子kc随着纵向间距Xd的减小和纵向车速Vx的增加而增大;随着路面附着系数μ的增加,危险评估因子kc减小,危险评估因子kc的范围在(0,1)区间范围内,说明危险评估模型可以有效量化风险。
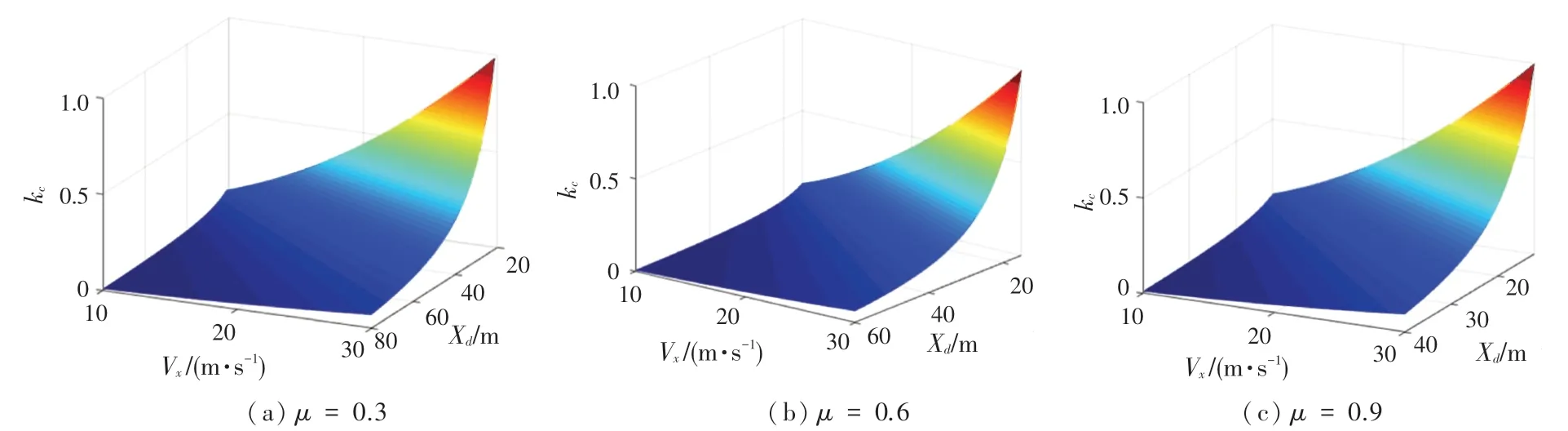
图2 不同路面附着系数下纵向车速和纵向车间距对危险评估模型的影响Fig.2 The impact of longitudinal speed and longitudinal car distance on the risk assessment model under different road adhesion coefficients
3 仿真分析
本文采用Carsim-Simulink 联合仿真对危险评估方法进行验证分析,在紧急换道避障工况下,对比分析智能车辆的换道避障控制效果。仿真工况设定为:路面附着系数μ =0.3,自车初始车速Vx =60 km/h,距障碍物车距Xd =32 m。
仿真结果如图3~图9 所示。
由图3 可知,危险评估模型可以实时预测与评估风险,在0~3.65 s 内迅速上升,并在3.65 s 降为0,说明在3.65 s 之后,车辆通过换道操纵避免了碰撞风险。

图3 危险评估因子变化曲线图Fig.3 Change curve of Risk assessment factor
如图4 和图5 所示,规划的参考换道轨迹连续且平滑,符合七次多项式的曲线特征,实际换道轨迹的跟踪效果都较好;未经危险评估的轨迹跟踪偏差峰值大约为0.17 m,而经危险评估后的轨迹跟踪偏差波动明显减小,且峰值大约为0.84 m,说明本文所设计的危险评估方法可以有效提高换道轨迹跟踪的精度。
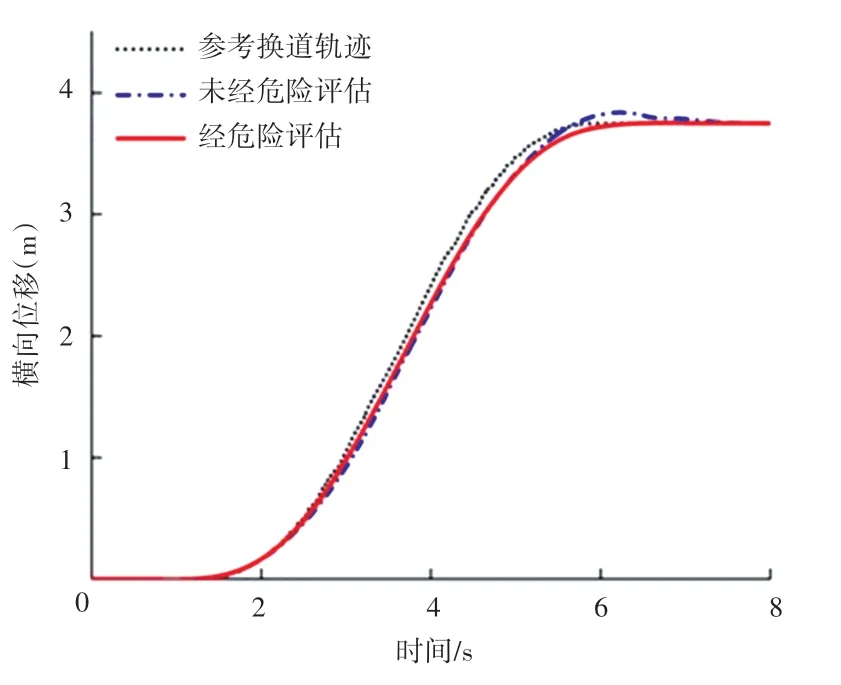
图4 换道轨迹曲线Fig.4 Lane change trajectory curve
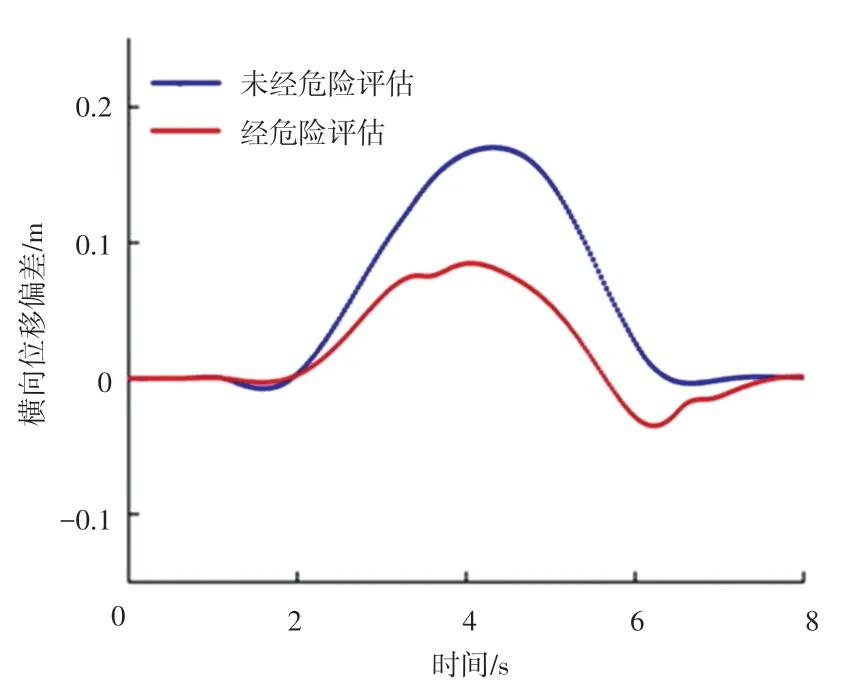
图5 横向位移偏差曲线Fig.5 Lateral displacement deviation curve
由图6~图9 可知,车辆横摆角速度、侧向加速度、质心侧偏角及前轮转角的变化曲线都较为平缓,未出现过大振幅和明显抖动,且经危险评估后,各项参数的波动都有一定程度的减小,有效提高了智能车辆在紧急工况下换道避障的稳定性。
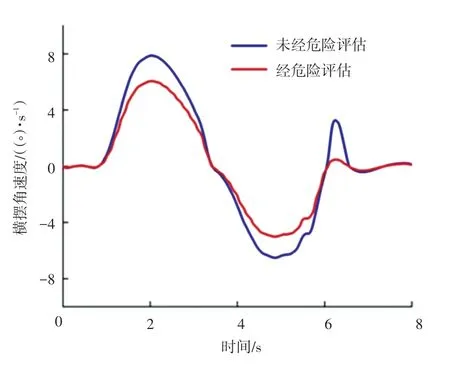
图6 横摆角速度曲线Fig.6 Yaw rate curve
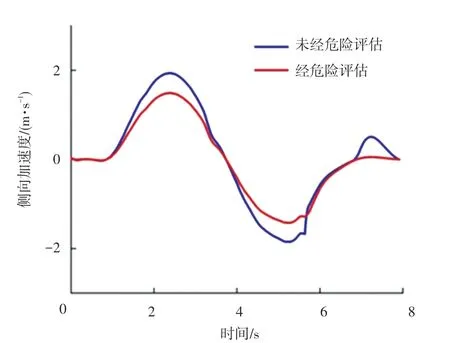
图7 侧向加速度曲线Fig.7 Lateral acceleration curve

图8 质心侧偏角曲线Fig.8 Centroid slip angle curve
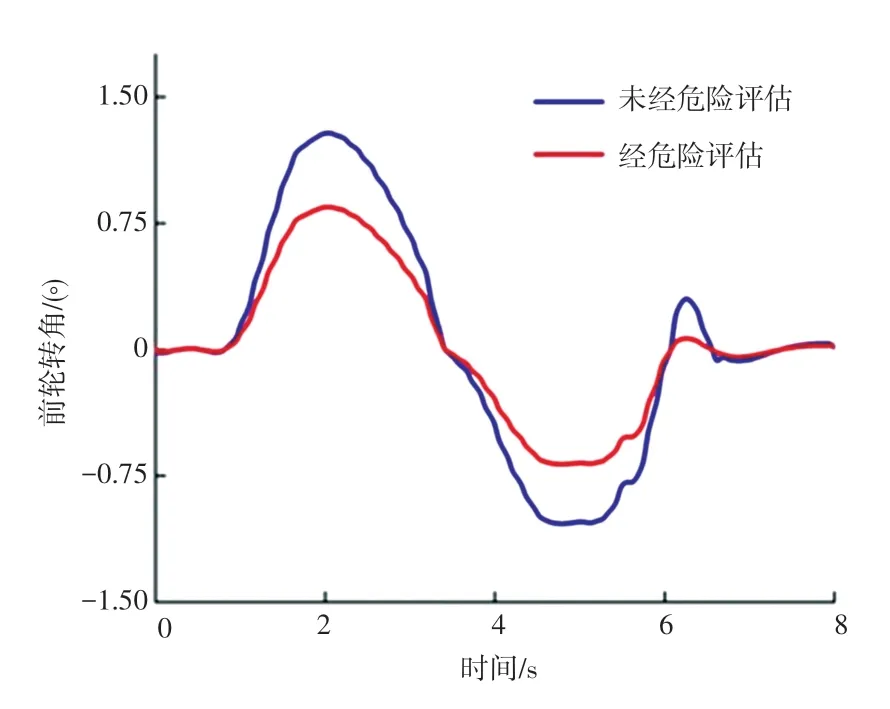
图9 前轮转角曲线Fig.9 Front wheel angle curve
综上,本文所设计的危险评估方法可以有效提高智能车辆的换道避障精度,并且能够对车辆横摆角进行有效的约束,提高换道避障的稳定性和安全性。
4 结束语
危险评估模型对智能车辆的换道避障有重大影响,本文通过七次多项式进行车辆换道轨迹规划,并结合七次多项式换道轨迹和车辆横摆角速度,设计了一种综合考虑碰撞和失稳风险的危险评估模型进行车辆换道避障的危险评估。通过Carsim -Simulink 联合仿真,模拟紧急换道工况,进行车辆紧急换道避障仿真。仿真结果表明,所提出的危险评估方法可以精确预测和评估换道风险,并能有效提高智能车辆换道避障的稳定性和安全性。