切换拓扑下异构无人集群编队-合围跟踪控制
2023-02-07魏志强翁哲鸣化永朝董希旺任章
魏志强,翁哲鸣,化永朝,董希旺,任章
1.复旦大学 工程与应用技术研究院,上海 200433
2.航天三院 创新研究院,北京 100074
3.北京航空航天大学 人工智能研究院,北京 100191
4.北京航空航天大学 自动化科学与电气工程学院,北京 100191
无人集群协同控制近年来受到国内外的广泛关注与重视,并在航空航天领域展现出强大的应用潜力,例如无人机蜂群攻击、多导弹协同突防、多卫星协同探测等。目前,集群系统协同控制领域已经产生了众多紧密相关而又各有侧重的研究分支,包括一致性控制(Consensus control)、编队控制(Formation control)、合围控制(Containment control)等。一致性控制是集群系统协同控制的基础性问题,其目标是使得集群中所有智能体的状态或输出能够实现一致[1]。编队控制是指通过设计合适的控制协议(控制器),使得集群中所有智能体的状态或输出,在对应空间内形成并保持特定的相对阵位关系[2]。在合围控制中,集群中的智能体被分为领导者和跟随者两类,通过设计分布式控制器,使得所有跟随者的状态或者输出,能够进入到多领导者状态或输出所形成的凸包内部[3]。
在传统的合围控制的研究中,通常假设多领导者之间不存在交互与协同。然而,在实际应用场景中,领导者往往需要协同来保持特定的时变编队队形,且能够跟踪参考航迹或者特定目标进行运动,以更好地满足任务需求。例如,高低搭配的多导弹系统协同攻击时,要求高配置的导弹通过协同形成期望的相对阵位关系,同时低配置的导弹需要能够在高配置的导弹的导引下准确落入攻击区域。该场景下就出现了更为复杂的编队-合围跟踪(Formation-containment tracking)控制问题,集群系统存在层内的不同协同控制目标以及层间的协同耦合,一方面要求多领导者形成特定的编队并跟踪参考轨迹或目标运动,另一方面要求跟随者能够进入领导者所形成编队的内部。针对线性集群系统,文献[4]提出了编队-合围跟踪控制的数学定义与控制框架,并给出了分层耦合情况下的分布式控制器多步设计方法。
现有的协同控制方法一般假设集群系统是同构的,即要求集群中的所有个体具有相同的动力学与运动学模型[5]。然而,同构集群作为群体协同的基本形态,存在智能涌现模式单一及协同能力薄弱等局限性。异构集群跨域协同可以充分发挥无人机、无人车、无人艇等不同无人系统的优势,以结构耦合和功能互补的方式实现集群智能的倍增,例如,多无人机-无人车空地协同侦察[6]、多无人机-无人艇空海协同巡逻[7]等。目前异构集群系统编队控制及合围控制的研究尚处于起步阶段,相关的研究成果较少。对于编队问题,文献[8-12]利用输出调节策略,提出了基于分布式观测器的分环编队控制策略,并给出了异构模型约束下时变编队跟踪的可行性条件及稳定性判据。文献[13-16]中假设存在多个同构领导者,提出了能够驱动异构跟随者输出收敛到多领导者凸包内部的分布式合围控制方法。
进一步地,文献[17]研究了高阶异构集群系统的编队-合围跟踪控制问题,基于输出调节策略构造了间歇通信条件下的编队-合围跟踪协议。文献[18]考虑了异构集群系统在离散通信条件下的输出编队-合围跟踪问题,文献[19]则基于自适应控制理论设计了完全分布式的编队-合围跟踪控制器。文献[17-19]中皆假设跟踪-领导者为自治系统,这会严格限制集群整体运动参考轨迹的类型,且不能表示具有未知机动的非合作目标,存在一定的应用局限性。此外,文献[17-19]中期望的领导者输出的凸组合是由集群系统的作用拓扑决定的,故当存在切换拓扑时,领导者的凸组合也会发生变化,将使得跟随者的瞬时输出很有可能会超出多领导者所形成的凸包,这意味着文献[17-19]中的方法无法直接应用于切换拓扑的场景。
针对上述技术挑战,研究了同时存在切换通信拓扑与领导者未知输入的高阶异构无人集群的编队-合围跟踪控制问题。将各智能体分为“跟踪-领导者”“编队-领导者”“跟随者”3 类,跟踪-领导者用以生成整个集群的参考轨迹,控制目标是使得编队-领导者的输出形成期望的时变编队跟踪,同时跟随者的输出能够收敛到编队-领导者输出所形成的凸包内部。与现有研究相比,主要创新点如下:①采用具有时变输入的跟踪-领导者来生成集群系统的整体参考轨迹或表示待跟踪的非合作目标,所提出的控制器对于具有未知输入的集群参考轨迹仍能有效跟踪,克服了现有编队-合围控制方法无法有效控制集群整体宏观运动的缺陷;②基于自适应控制与滑模变结构控制理论,对编队-领导者与跟随者分别设计了基于边的分布式观测器,能够同时应对切换拓扑与领导者时变输入的影响;③利用多编队-领导者状态的分布式估计值,提出了一种预先定义的合围控制策略,使得跟随者的收敛目标值不依赖于通信拓扑,从而摆脱了已有合围控制方法不适应切换拓扑的局限。
1 预备知识与问题描述
1.1 图 论
异构无人集群的通信拓扑可用图G={V,E,W}表 示,V={v1,v2,…,vN}表示节点集合,E ⊆{(vi,vj):vi,vj∈V;i≠j} 表示边集合,W=[wij]∈RN×N表示具有非负权重wij的邻接矩阵。令εij=(vi,vj)表示图G中从节点vi到节点vj的一条边。权重wij>0 当且仅当εji∈E,否 则wij=0。用Ni={vj∈V:(vj,vi)∈E }表示节 点vi的邻居集合。将图G的入度矩阵定义为D=,其中,表示节 点vi的入度。定义图G的拉普拉斯矩阵为L=D-W。
利用一组有序边(v1,v2),(v2,v3),...,(vk-1,vk)表示从节点v1到节点vk的有向路径。如果对于任意εij∈E 都有εji∈E,且wij=wji,则图G被称为无向图,否则称之为有向图。对于无向图,如果任意2 个不同的节点之间都存在至少一条路径,则称无向图是连通的。对于有向图,如果图G中至少存在一个根节点到其他所有节点都有有向路径,则称图G具有一个生成树。
引理1[1]对于具有N个节点的无向图G,可得如下性质:
1)L具有至少一个0 特征值,1N是0 特征值对应的一个特征向量,满足L1N=0。
2)如果G是连通的,则0 是L的单一特征值,剩余N-1 个特征值均是正的。
1.2 问题描述
考虑由N+M+1 个智能体所构成的高阶异构无人集群系统,其中:i=0 表示跟踪-领导者(Tracking-Leader);i=1,2,…,N表示编队-领导者(Formation-Leader);i=N+1,N+2,…,N+M表示跟随者(Follower)。
定义1 根据协同任务需求,将集群系统中的智能体分为跟踪-领导者、编队-领导者和跟随者。跟踪-领导者用以生成集群系统整体运动的参考轨迹;编队-领导者需要在形成期望的时变编队构型的同时,实现对跟踪-领导者运动轨迹的跟踪;跟随者的输出需要收敛到编队-领导者输出所形成的凸包内。跟踪-领导者没有邻居,编队-领导者的邻居只包括领导者,跟随者的邻居为编队-领导者或其他的跟随者。
为进一步解释上述定义,图1 给出一个多无人机-无人车(Unmanned Aerial Vehicle Unmanned Ground Vehicle,UAV-UGV)系统以编队-合围跟踪的方式协同穿越危险区域的示意图。图中跟踪-领导者表示从出发地到目的地预先规划的轨迹,编队-领导者表示配备有探测装置的无人机,而跟随者表示没有安装探测传感器的无人车。通过协同控制使得多无人机形成期望的时变编队队形且能够跟踪参考航迹,同时基于邻居信息交互,让没有探测传感器的跟随者无人车收敛到多无人机所形成编队的内部。这样就可以保证无人车在移动过程中一直处在无人机形成的安全区域内,以相对较小的代价使整个多机器人系统穿越危险区域,安全地运动到目的地。

图1 多无人机-无人车系统协同穿越危险区域示意图Fig.1 Example for cooperative crossing dangerous area of multi UAV-UGV swarm systems
需要指出的是,定义1 中的跟踪-领导者不仅可以表示预先设计的虚拟参考轨迹,还可以代表某一具有全局定位能力的实际个体,用以控制整个集群系统的宏观运动。此外,跟踪-领导者还可以表示非合作目标,例如,多弹协同拦截场景中的来袭目标。
考虑如下的跟踪-领导者的模型:

式中:v0(t)∈Rq、r0(t)∈Rl和y0(t)∈Rp分别表示跟踪-领导者的状态、控制输入与输出;S、E与F为常值矩阵;要求v0(t)是有界的。将编队-领导者和跟随者的模型表示如下:

式中:xi(t)∈Rni、ui(t)∈Rmi和yi(t)∈Rp分别表示智能体(ii=1,2,…,N+M)的状态、控制输入与输出;Ai、Bi与Ci为常值矩阵。由式(1)和式(2)可知,所考虑的异构不仅存在于领导者和跟随者之间,也包括编队-领导者内部以及跟随者内部。
为了涵盖跟踪-领导者为非合作目标的场景,假设其控制输入r0(t)对于所有编队-领导者和跟随者都是未知的。例如,在多飞行器协同拦截的场景中,跟踪-领导者代表拦截目标,r0(t)则表示拦截目标的未知机动。要求r0(t)满足以下的有界条件。
假设1 跟踪-领导者的未知输入r0(t)是有界的,存在正常数η使得
对于编队-领导者(i=1,2,…,N),利用时变向量刻画其期望的 时变输 出编队,其 中,hyi(t)(i=1,2,…,N)是分段连续可导的。
定义2 对于任意给定的有界初始状态,如果下式成立:

则称编队-领导者实现了期望的时变输出编队跟踪。
定义3 对于任意跟随者k,存在非负常数ρk,j(k∈{N+1,N+2,…,N+M},j=1,2,…,N)满足,使得

成立,则称异构集群系统式(2)实现了输出合围。
定义4 如果对于任意的编队-领导者i(i∈{1,2,…,N})以及跟随者k(k∈{N+1,N+2,…,N+M}),有式(3)和式(4)同时成立,则称高阶异构集群系统式(1)与式(2)实现了期望的输出编队-合围跟踪。
研究了集群系统的编队-合围跟踪问题,引入跟踪-领导者来配置集群系统的整体运动。从定义2~定义4 可知,时变编队跟踪问题、合围问题以及一致性跟踪问题均可以统一到编队-合围跟踪问题的一般框架内。在定义3 中,通过非负权重ρk,j来刻画多编队-领导者输出的凸组合,通过不同取值组合的ρk,j,可以将编队-领导者所形成编队内部的任意一点作为跟随者k的期望跟踪目标。值得指出的是,ρk,j的取值与通信拓扑无关,可以根据实际任务需求进行预先设计,更加具有实际意义。
2 控制器设计与稳定性分析
考虑集群系统存在切换拓扑的场景,将所有可能的 作用拓 扑的下 标集合记为Z={1,2,…,z}。令[tl,tl+1)(l=0,1,2,…)表示一个无限序列的一致有界非重叠时间区间,其中,tl+1-tl≥τd>0。作用拓 扑在时 刻tl+1发生切换。令σ(t):[0,∞)→{1,2,…,z}表示切换信号,其取值为当前图的序号。在时刻t,作用图和对应的拉普拉斯矩阵分别记为为保证各编队-领导者都能在合围控制中发挥作用,要求各跟随者邻居集合的并集包含所有的编队-领导者。

对于编队-领导者(ii=1,2,…,N),期望的时变输出编队向量hyi(t)由以下的局部外系统产生:

假设3 如下的调节器方程:

有解(Xi,Ui)(i=1,2,…,N)。
假设4 如下的局部调节器方程:

有解(Xhi,Uhi)(i=1,2,…,N)。
假设5 如下的调节器方程:

有解(Xi,j,Ui,j)(i=N+1,N+2,…,N+M;j=1,2,…,N)。
考虑如下的编队-合围跟踪控制器:对于编队-领导者(ii=1,2,…,N),有
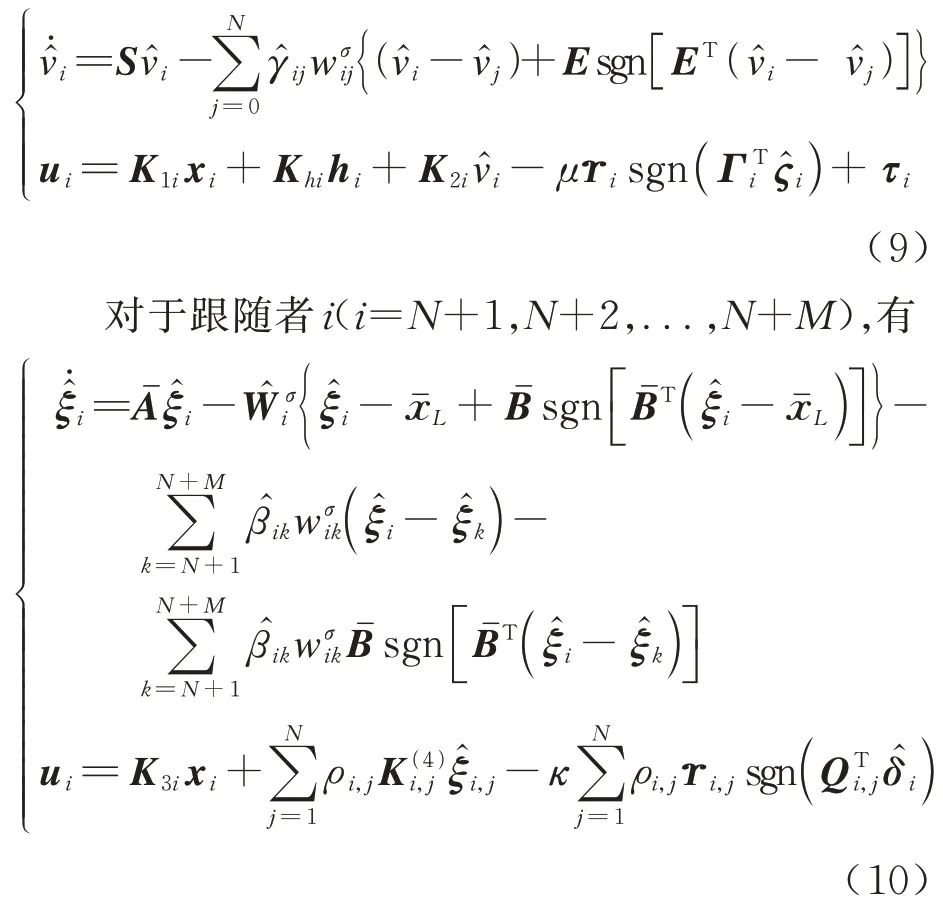
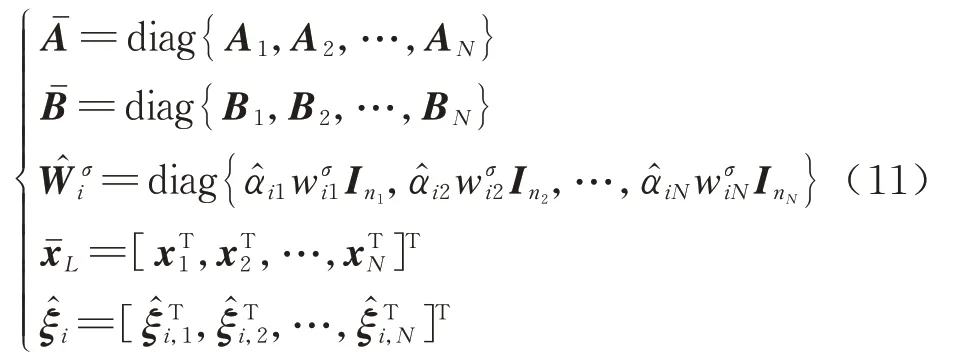
在编队-领导者(ii=1,2,…,N)的控制器式(9)中表示对v0的分布式估计值,表示自适 应控制增益;τi表示时变编队跟踪补偿输入;表 示待设计的正常数;K1i、Khi、K2i、ϒi和Γi表示待确定的增益矩阵。在跟随 者i(i=N+1,N+2,…,N+M)的控制器式(10)中,有:
异构集群系统编队-合围跟踪控制设计框图如图2 所示。下面给出确定式(9)和式(10)中控制参数的算法。
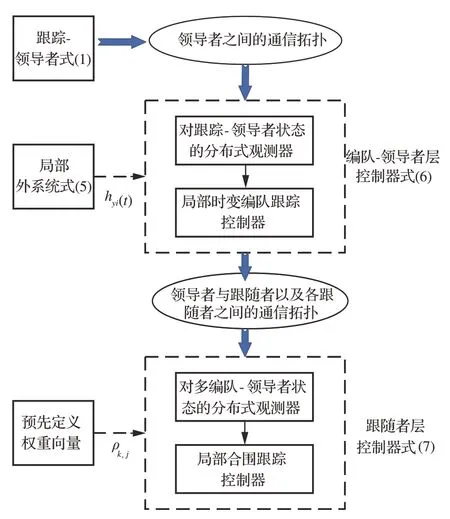
图2 异构集群系统编队-合围跟踪控制设计框图Fig.2 Design diagram for formation-containment tracking control of heterogeneous swarm systems
算法1 对于编队-领导者和跟随者,采用以下步骤设计编队-合围跟踪控制器式(9)和式(10)。
步骤1 分别选取常值矩阵(Xi,Ui)(i=1,2,…,N),(Xhi,Uhi)(i=1,2,…,N),(Xi,j,Ui,j)(i=N+1,N+2,…,N+M,j=1,2,…,N)使得假设3~假设5 中的调节器方程成立。
步骤2 设计编队-领导者(ii=1,2,…,N)的控制器式(9)。对于由局部外系统式(5)所产生的期望时变输出编队向量hyi(t),检验是否存在补偿输入τi,使得编队-合围跟踪可行性条件成立:
如果式(12)对于各个编队-领导者都成立,则算法继续;否则,期望输出编队hy(t)在所设计的控制器下是不可行的,算法停止。自适应参数的更新律为

步骤3 设计跟随者i(i=N+1,N+2,…,N+M)的控制器式(10)。自适应参数(j∈{1,2,…,N})和的更新律如下:

编队可行性条件式(12)揭示了可行的时变编队与编队-领导者异构动力学特性的匹配关系,利用局部外系统式(5)中的ri(t)和控制器式(9)中的时变编队补偿输入τi(t)来扩展可行的编队集合,使得异构集群在所提出的控制器下能够形成更多类型的时变编队。为了给出更直观的可行性条件式(12)的检验方法,根据文献[2,8]中的非奇异变换,不失一般性地假设矩阵Bi是列满秩的,则存在非奇异矩阵,其,使得和成立。在式(12)两边同时左乘变换矩阵Γi,则编队-合围跟踪可行性条件式(12)可以分解为

对于给定的异构集群系统模型和期望的时变编队向量,可以事先明确,因此,易于检验条件是 否满足,同时可以直接设计补偿输入τi(t)=利用上述非奇异分解方法,能够更直观地检验编队-合围跟踪可行性条件式(12),并且给出补偿输入τi(t)的计算表达式。此外,如式(13)和式(14)所示,自适应增益通过基于边的邻居误差进行动态更新,能够分布式地调整,避免了对切换拓扑各个拉普拉斯矩阵的特征值、领导者系统矩阵的特征值等全局信息的依赖。
以下定理给出了高阶异构无人集群系统式(1)和式(2)实现编队-合围跟踪的充分条件。
定理1 假设1~假设5 成立。如果由式(5)所生成的期望编队向量hy(t)满足可行性条件式(12),则存在切换拓扑的高阶异构集群系统式(1)和式(2)能够在由算法1 所确定的控制器式(9)和式(10)的作用下,实现期望的输出编队-合围跟踪。
证明 以下将首先证明编队-领导者能够实现期望的输出时变编队跟踪,进而证明跟随者的输出能够收敛到编队-领导者输出所形成的凸包。对于编队-领导者(ii∈{1,2,…,N}),令表示对跟踪-领导者状态的分布式估计误差,则由式(1)和式(9)可得:
考虑如下的共同Lyapunov 函数:

沿轨迹式(17)对V1求导可得:
将式(20)代入式(19)则有:


对于编队-领导者(ii=1,2,…,N),将控制器式(9)代入系统方程式(2)。令ςi=xi-Xhi hi-Xiv0,则有:

将Khi=Uhi-K1i Xhi、K2i=Ui-K1i Xi与Biϒi-Xi E=0 代入式(31),可得:





注释1 虽然文献[17-19]考虑了编队-合围跟踪问题,但都要求跟踪-领导者为自治系统,不具有控制输入,这会严重限制跟踪领导者所产生参考信号的类型。引入了具有时变未知输入的跟踪-领导者见式(1)来生成集群系统的整体参考轨迹,进一步研究了高阶异构集群系统的编队-合围跟踪控制问题,所提出的控制器对于具有未知输入的集群参考轨迹仍能有效跟踪。从定理1 的证明过程可知,编队-领导者的状态与控制输入对跟随者的合围误差都存在影响,如式(37)和式(55)所示,对跟随者设计的合围控制器需要能够有效补偿编队-领导者的时变编队跟踪运动所带来的耦合作用,因此,所考虑的编队-合围跟踪控制问题比孤立的编队跟踪问题和合围问题更具有挑战性。
注释2 与文献[23]中基于节点的方法不同,本文将自适应控制增益与非线性补偿函数分配到了作用拓扑中的各条边。采用基于边的自适应分布式观测器,能够构造共同Lyapunov 函数V1与V3,进而可以证明闭环系统在切换拓扑下的稳定性。因此,本文提出的基于边的自适应编队控制方法能够同时应对切换拓扑与领导者时变输入的影响。
注释3 文献[24-29]考虑了具有分层架构的两层式编队-合围控制问题,其中都假设通信拓扑是固定的。在现有的合围控制与编队-合围控制的研究文献[13-19,24-29]中,期望的领导者状态/输出的凸组合是由集群系统的作用拓扑决定的,故当存在切换拓扑时,领导者的凸组合也会发生变化。在这种情况下,跟随者的瞬时状态/输出很有可能会超出多领导者所形成的凸包,这意味着文献[13-19,24-29]中的现有合围控制方法难以直接应用于切换拓扑的场景。基于对多领导者状态的分布式估计值,提出了一种预先定义的合围控制策略,采用给定的非负权重ρi,j(j∈FL)来刻画多领导者期望的凸组合,使得跟随者的收敛目标值不依赖于作用拓扑,从而实现了切换拓扑条件下高阶异构集群系统的编队-合围跟踪控制。假设编队-领导者之间以及跟随者之间的拓扑是无向的,有向切换拓扑下的编队合围跟踪控制问题更具有挑战性,是值得未来重点研究的方向之一。
3 无人机-无人车异构集群仿真验证
将编队-合围跟踪控制方法应用到多无人机-无人车异构系统的空地协同巡逻应用场景,其中,跟踪-领导者i=0 代表异构多机器人系统的整体参考轨迹,编队-领导者i=1,2,3,4 表示四旋翼无人机,跟随者i=5,6,…,10 表示麦克纳姆轮无人车。多无人机在空中形成期望的编队跟踪,同时多无人车能够收敛到多无人机所形成凸包在地面的投影内,多机器人系统以编队-合围跟踪的形式执行协同巡逻任务。由于四旋翼无人机的高度方向可以单独控制,以下仅考虑二维平面(X-Y平面)内的运动情况。假设多机器人系统的作用拓扑存在切换,所有可能的拓扑如图3 所示,设作用 拓扑在之间每5 s 切换一次,且其初始作用拓扑为
考虑如图3 所示的跟踪-领导者模型:
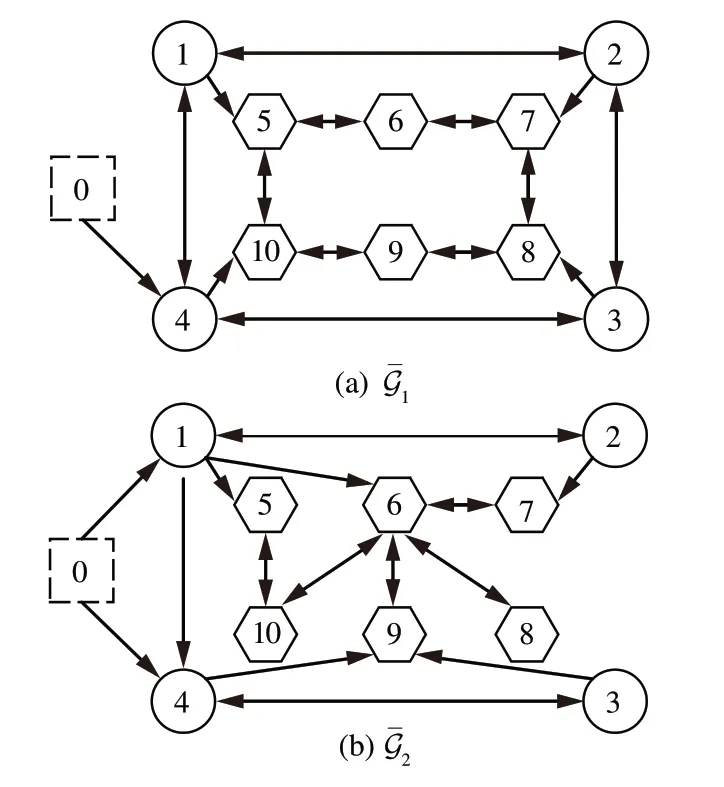
图3 可能的作用拓扑Fig.3 Possible topologies

设其未知控制输入为

基于文献[30]中的内外环控制架构,四旋翼无人机在外回路(位置-速度回路)的运动学模型可由式(2)近似表示,其中分别取ϖx1=ϖx2=0,ϖv1=ϖv2=0,ϖx3=ϖx4=-1,ϖv3=ϖv4=-1。采用文献[31]中的反馈线性化技术,麦克纳姆轮无人车的运动学模型也可近似由式(2)表示,其中,Ai=02×2,Bi=I2,Ci=I(2i=5,6,…,10)。各无人机的状态变量由位置与速度组成,输出为位置;各无人车的状态与输出皆表示位置。
4 架无人机作为编队-领导者,在指定高度进行定高飞行,即在Z轴方向进行单独控制。要求无人机在X-Y平面内形成正方形编队,期望的输出编队向量表示为,其中,hy1=[ -1,1]T,hy2=[1,1]T,hy3=[1,-1]T,hy4=[ -1,-1]T。为生成hy,易知局部外系统式(5)中的矩阵可选取为Hi=02×2,Ri=02×2,Yi=I(2i=1,2,3,4)。6 辆无人车需要收敛到多无人机所形成的凸包在地面的投影内,为刻画各无人车的期望收敛值,定义权重向量ρi=[ρi,1,ρi,2,ρi,3,ρi,4(]i=5,6,…,10),并选取

利用算法1 对编队-合围跟踪控制器式(9)和式(10)进行设计。首先,分别选取X1=X2=I4,U1=U2=I2⊗[0 0],X3=X4=I4,U3=U4=I2⊗[1 1],Xhi=I2⊗[1 0]T,Uhi=-ϖxi I2(i=1,2,3,4),Xi,j=I2⊗[1 0],Ui,j=I2⊗[0 1](i=5,6,…,10;j=1,2,3,4),可以验证假设3~假设5 中的调节器方程成立。然后,设计编队-领导者无人机(ii=1,2,3,4)的控制器式(9)。由于Ri=02×2,令补偿输入τi=02×1,可知可行性条件式(12)对于各个编队-领导者都成立。选取自适 应参数的初 值为j=0,1,…,4)。令μ=1,K11=K12=I2⊗[-2 -2],K13=K14=I2⊗[-1 -1],ϒi=I2,i=1,2,3,4。最后,设计跟随者无人车(ii=5,6,…,10)的控制器式(10)。令自适应参数与的初值为选取K3i=-I2和ϒi,j=02×(2j=1,2,3,4)。跟踪-领导者的初始状态为v0(0)=[ -20,0,0,-1]T,编队-领导者与跟随者的初始状态由随机数产生。
图4 给出了无人机-无人车异构集群系统在t=30 s 内的位置轨迹以及在不同时刻的位置截图(t=0,15,25,30 s),其中,五角星表示跟踪-领导者i=0;菱形、上三角形、圆形与右三角形分别表示编队-领导者无人机i=1,2,3,4;正方形表示 跟随者 无人车i=5,6,…,10。图5 与图 6 分别给出了编队-领导者的输出编队跟踪误差以及跟随者的输出合围误差曲线。由图4~图6 可知,4 架无人机形成了期望的正方形编队,且能够实现对跟踪-领导者运动轨迹的跟踪,同时六辆跟随者无人车能够收敛到多无人机所形成的凸包在地面的投影内。因此,多无人机-无人车异构集群系统实现了期望的输出编队-合围跟踪。

图4 多无人机-无人车系统在t=30 s 内的位置轨迹以及在指定时刻t=0,15,25,30 s 的位置截图Fig.4 Position trajectories with t=30 s and snapshots at t=0,15,25,30 s for multi UAV-UGV swarm systems
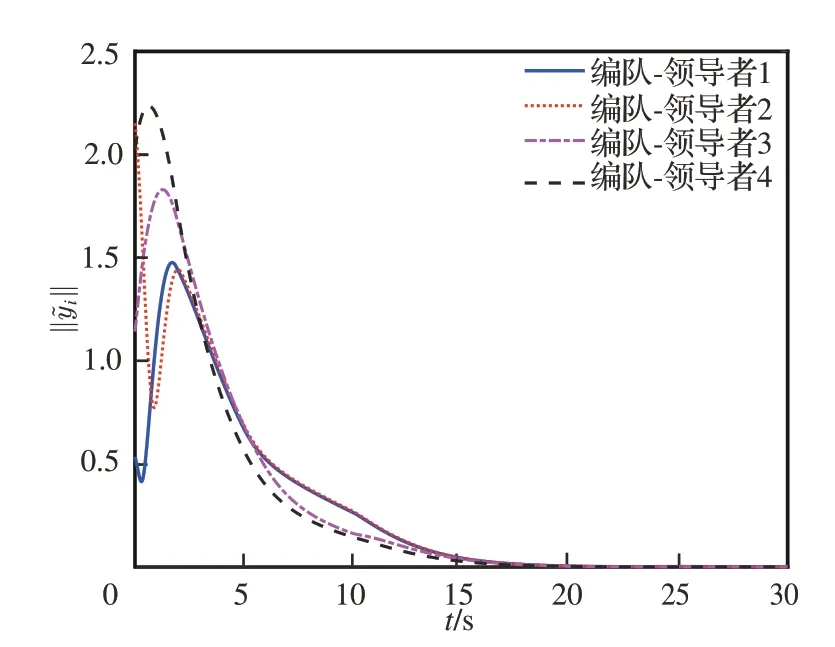
图5 编队-领导者的输出编队跟踪误差曲线Fig.5 Output formation tracking errors for formation-leaders

图6 跟随者的输出合围误差曲线Fig.6 Output containment errors for followers
为了进一步展示所提出的控制方法能够适用于时变编队场景,将编队-领导者的期望编队构型设置为时变旋转圆形编队。对于编队-领导者无人机(ii=1,2,3,4),分别选取期望的时变编队向量为

图7 给出了无人机-无人车异构集群的位置轨迹以及在指定时刻的位置截图,可以看出4 架无人机实现了期望的时变旋转编队构型,且跟随者无人车能够收敛到时变编队的内部,即无人机-无人车异构集群实现了期望的编队-合围跟踪。

图7 无人机时变旋转编队下t=30 s 内集群位置轨迹以及在指定时刻t=0,20,25,30 s 的位置截图Fig.7 Position trajectories with t=30 s and snapshots at t=0,20,25,30 s with time-varying rotating formation for UAVs
4 结论
研究了切换拓扑下高阶异构集群系统的输出编队-合围跟踪控制问题,主要结论如下:
1)采用具有时变输入的跟踪-领导者来生成集群系统的整体参考轨迹,克服了现有编队-合围控制无法有效控制集群整体宏观运动的缺陷。
2)基于自适应控制与滑模变结构控制理论,对编队-领导者与跟随者分别设计了基于边的分布式观测器,能够同时应对切换拓扑与领导者时变输入的影响。
3)利用多编队-领导者状态的分布式估计值,提出了一种预先定义的合围控制策略,使得跟随者的收敛目标值不依赖于作用拓扑,进而摆脱了已有编队-合围控制方法不适应于切换拓扑的局限。
4)提出了对分布式编队-合围跟踪控制器的参数进行设计的算法,给出了分层耦合条件下高阶异构无人集群系统实现输出编队-合围跟踪的充分条件。