无人船多波束测深系统应用及精度验证
2023-02-05米仁欢
米仁欢
(广州港工程管理有限公司,广东广州 510730)
0 引言
随着国家经济快速发展,地理信息成果数据已成为国家基础性、战略性信息资源,广泛服务于政府决策、资源普查以及应急保障等领域。陆地地理信息数据可以采用不同分辨率遥感卫星、倾斜摄影测量、北斗定位系统、车载移动测量设备以及三维激光扫描仪等设备获取原始数据,经过专业处理软件生成定位精度高、地理信息丰富的陆地基础地理信息产品。但水下基础地理信息产品获取方式相对比较单一,难以满足经济快速发展的要求。随着国家“经略海洋”战略的提出,急需优化传统的水域测量作业方式来获取水库、河道、浅滩以及深海等区域水下地形数据。
传统的有人船测量方法存在船体不稳定、复杂区域难以保障安全等问题,为了克服解决这些问题,提高水下地形测量效率,无人船搭载GNSS 传感器、测深仪成为理想的选择。相关学者进行了一系列研究:文献[1]提出基于无人船的水陆一体化测量方法,该方法通过在无人船上搭载的激光扫描仪、多波束测深组合导航系统,能够有效采集陆地和水下地形数据;文献[2]采用单波束测深系统测量鱼塘水下地形数据,通过外业RTK 方式验证单波束测深系统精度;文献[3]提出RTK 三维水深测量技术进行多波束测深系统潮汐改正方法,通过编程实现数据准确、便捷水深提取工作;文献[4]提出无人艇多波束测深精度分析方法,对多波束测深系统采集的数据进行成果内符合精度、外符合精度验证;文献[5]提出无人船水下测量精度控制措施,分析了影响水下地形测量精度的因素,并提出对应的改进措施。上述文献对无人船在水下测量、精度提升等方面进行研究,但对于测深成果绝对精度验证方面研究较少。
鉴于此,本文采用无人船搭载多波束测深系统、GNSS 等传感器快速、高效获取水下地形信息,通过相邻航线重叠区域交叉测深点高程数据验证多波束测深系统内部精度,结合外业RTK 测量的高程值数据对比分析验证多波束测深系统绝对高程定位精度。本文详细介绍利用华测华微三号无人船测量系统和GNSS-RTK 系统对广州某地区4.5 km2鱼塘水域水下地形测量。实验结果表明:基于无人船多波束测深系统能够较好地获取水下地形数据,成果精度与作业效率相比传统测量方法有较好的提高,具有较高的实用价值。
1 无人船多波束测深系统精度验证原理
无人船多波束水深测量系统以无人船为移动平台,装备高精度的GNSS、激光扫描仪、多波束测深仪、高精度惯性设备等高精度传感器,通过系统控制模块对规划后的航线进行控制,确保测区全部覆盖,对采集数据利用无线传输的方式实时接收。无人船多波束水深测量系统主要包括无人船、多波束测量系统和岸基系统3 个部分。
1.1 GNSS差分定位技术
由于网络RTK 技术能够快速、准确地获取厘米级定位精度,所以在实际工程应用中得到广泛应用。文中利用两台GNSS 接收机配合,其中一台固定在岸边已知位置处作为基准站,另外一台固定在无人船上作为流动站,流动站接收导航卫星信号并将接收到的观测数据通过网络传送给基准站,通过差分解算方法获取流动站与基准站间的基线向量,最终获取流动站空间三维坐标值。
1.2 多波束测深系统原理
多波束测深系统通过数字测深仪能够精确测得水下地形,获得高精度的水下三维地形图(坐标系统:WGS-84,高程系统:大地高)。该系统具有测量速度快、范围广、效率与精度高的特点,适合大面积水底地形测量工作。由于受到水下环境、测量距离等因素的影响,多波束测深系统通过束控法在线阵或面阵的发射器上发射一个微窄的超声波,在接收阵上采用米尔斯交叉原理接收水底反射形成多路回收波,进而获取精确的水深数据。
多波束测深系统是利用无人船搭载的发射换能器、接收换能器进行水深测量,通过超声波在水介质中的反射实现距离测量。水深值通过超声波在水介质中传播到海底返回接收的时间差确定,具体解算公式如式(1)所示:
式中:D为反射转换器到水底间距离;C为水介质内超声波的传播速度;Δt为数字测深仪发射超声波与接收超声波时间差。同时利用无人船上装载的高精度GNSS 接收机,获取该时刻GNSS 接收机位置的高程H1,则该时刻测量水底的水深高程值H如式(2)所示:
式中:H2为GNSS 接收机到水面的高度,该值为固定值;H3为无人船放入水中吃水高度值;αi为第i个探测器与垂直方向的夹角,该值为实验室安装角度,需要进行标定;ΔD为水下环境带来的测量误差。
相比较测深系统而言,多波束测深系统通过多个转换器单元组成线阵或面阵的方式同时发射、接收多个超声波束对水下地形进行测量,大大降低了数据获取成本。
1.3 多波束测深系统误差来源与评估方法
多波束测深系统误差来源较多,基本可以分为系统误差和偶然误差。主要包括GNSS 定位误差、水深测量系统安装误差、系统参数标定误差、潮汐误差以及声速剖面误差等。GNSS 系统定位时间系统、多波束测深系统以及姿态传感器时间系统不一致,会带来测深点的平面、测深误差,导致不同条带的测深数据测量水深不一致;水深测量系统安装角度难以达到理论设计指标要求,导致不同条带数据拼接时重叠部分水深不完全重合,越靠近边缘部分误差越大;多波束测深经过声速跳跃层时由于声的折射引起的声速剖面误差随波束角的变化而变化,使得不同波束角测深精度不一致。
由于国内缺少多波束测深数据处理规范、完善的多波束水深测量质量评价体系,故文中采用水深测量极限误差、主测线与检查线交叉点不符值2 个指标对多波束水深测量值进行统计。
1)水深测量极限误差。
交通部多波束测深系统、IHO 海道测量标准中对水深极限误差规定为
式中:Δ 为水深极限误差;a为系统误差;b为水深误差比例系数;d为测量水深值。
2)主测线与检查线交叉点不符值。
由于水底高程真值通常难以获取,故难以通过测量值与真值进行直接比较。采用不同测量波束获取交叉值进行误差统计,成为多波束测深系统内符合精度评价的主要方法。
2 工程实例
2.1 数据采集
为了验证无人船多波束测深系统精度,文中选用华测华微三号无人船测量系统对广州市某地区4.5 km2鱼塘水域水下地形测量。该系统安装24 VDC 转220 VAC 逆变器和动力电池,GNSS 定位系统RTK 定位精度平面8 mm+1 ppm、高程15 mm+1 ppm,多波束测深系统的测深范围为0.15~300 m、测深精度为1 cm+0.1%h 等。
为了保障多波束水深测量精度,在进行水深数据采集前,需对多波束测深系统安装参数进行检校。多波束测深系统以多波束声呐安装与水面交点为原始参考点,以船头前进方向为Y轴正方向,船右舷为X轴正向,Z轴为垂直向下方向。在测量前后分别测量各传感器相对参考原点位置值,取两次参数平均值为最终的传感器安装参数。对于多波束测深系统转化器安装偏差测量的仪器,选择在水深坡度变化显著的码头进行测量。通过C—Nav3050 星战定位设备输出ZDA、1PPS 信号,使GNSS 的时间与多波束测深处理单元的时间精确同步,减少因时间延迟导致的系统误差。

表1 系统检校结果
2.2 航线规划
根据测区范围规划无人船自动测量的航线。航线规划如图1 所示。

图1 航线规划结果
2.3 数据处理
按照数据处理规范,对测量得到的多波束测深数据进行数据处理。处理完成后,依据需求对数据进行重采样,具体操作如下:
1)利用HydroSurvey 测量软件对数据进行后处理,对需要处理的水深数据文件选择合适的参考文件,打开水深提取文件;
2)设置数据重采样间隔,依据参数在航线方向的采样间隔取一个测量点;
3)对所有观测数据重采样后,生成最终的水下三维数据,最终的成果数据如图2 所示。
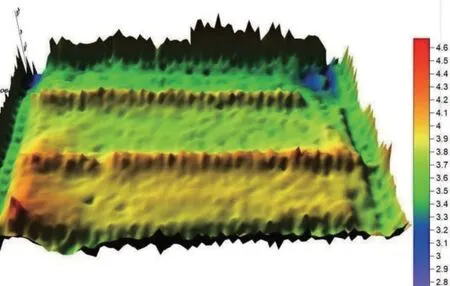
图2 水下三维数据结果单位:m
2.4 精度分析
为了验证无人船多波束测深系统内部精度,先对单一航线获取的水深数据进行单独处理,然后将相邻航线重叠数据进行求差运算。经统计,相邻航线交叉点共计2 975 681 个,最大高程差值为0.21 m,最小高程差值为0.02 m,中误差为0.08 m 远小于水深0.056 m 的限差要求,成果内符合精度满足各种规范要求。同时,由于本次测量水深比较浅,将池塘排空水后,再随机选取30 个点位进行人工测量高程值。假定人工测量高程值为真值,将其与无人船多波束测深系统获取的高程值进行比较,从而评定无人船测深系统绝对测深精度(外部精度)。
由图3 可知:DZ 高程值小于0 的有12 个点,大于0 的高程误差值有18 个,数据分布基本符合高斯分布情况。误差最大值为0.112 m,最小误差0.003 m,误差绝对值小于0.04 m 的数量占80% 以上,表明无人船多波束测深获取水下测高数据稳定性较强。

图3 DZ 直方图分布
3 结语
目前,无人船多波束测深系统技术还处于发展阶段,技术尚不成熟,但近年来无人船测量技术为水下地形测量提供了一种新的测量方向。本文采用无人船搭载多波束测深系统测量水下地形数据,同时,验证多波束测深系统成果精度,结果显示:精度符合各种规范要求,解决水下地形难以测量问题,实现水下地形新的作业模式。随着水下技术发展,无人船多波束水下测深技术应用越来越广泛。
