基于窄带光谱图像分析的小麦冠层植被指数测量方法研究
2023-02-02余洪锋徐焕良丁永前杨紫楠窦祥林李庆关心桐
余洪锋,徐焕良,丁永前,3*,杨紫楠,窦祥林,李庆,关心桐
(1.南京农业大学工学院,江苏 南京210031;2.南京农业大学人工智能学院,江苏 南京210031;3.南京农业大学现代作物生产省部共建协同创新中心,江苏 南京 210095)
植被指数作为作物生理参数评估的度量指标,可有效反映作物实时长势水平[1]。然而,当作物处于早期生长阶段,冠层覆盖率较低,监测作物生长的光谱仪响应信号中混合了土壤背景干扰,如果不进行必要的土壤与冠层信号分离处理,土壤背景会严重影响植被指数的获取精度[2],现有的GreenSeeker、Cropcircle 等系列便携式植被指数测量仪都存在类似问题。
国内外学者为了抑制土壤背景对植被指数测量的干扰,主要从修正植被指数和运用图像分析技术分割作物背景两方面研究着手。修正植被指数目前有3种方法:第1种方法采用已提出的修正植被指数,如垂直植被指数(PVI)、土壤调整植被指数(SAVI)、转化土壤调整植被指数(TSAVI)、改进红边归一化植被指数(MNDVI)等[3]。在大多数情况下,修正的植被指数对土壤背景的敏感性较低,可以消除土壤背景对测量结果的影响。然而,大部分修正的植被指数对土壤亮度和颜色敏感,不同的土壤亮度和颜色会对测量结果产生未知的影响[4]。第2种方法是采用土壤亮度线,由于土壤类型是土壤亮度线变化的主要因素,土壤亮度线要针对不同类型的土壤分别定义,因此,无法定义通用土壤亮度线,给实际应用带来了不便。第3种方法是开发光谱指数预测模型,通过统计分析方法,消除土壤背景干扰,建立生长评价指标与光谱指数间的关系[5-6]。光谱指数预测模型需要大量的经验数据来完善模型,手段较为复杂[7]。以上基于修正植被指数的方法,可在一定程度上消除土壤背景对植被指数的干扰,但通用性不强。运用图像处理技术分割作物冠层与背景,尤其针对常规的RGB彩色图像具有明显的优势。目前已形成了基于颜色指数、阈值分割、机器学习3种主要的作物冠层提取算法[8-10]。
随着人工智能的蓬勃发展,机器学习已广泛运用于作物表型的提取,其中超像素和卷积神经网络是机器学习2类常规的技术手段,两者技术各有优缺点。超像素基于像素水平的颜色特征和纹理特征生成候选区域,判定候选区域的类别(冠层或背景),处理速度快,但分类的精度较低[11]。Lu等[12]融合简单线性迭代聚类方法SLIC和 Graph-based 产生超像素,提取超像素的平均颜色,由神经网络群体模型判别超像素类型,实现了玉米穗的分割。Guo 等[13]通过SVM对处于抽穗期的稻穗检测进行研究,所提出的分割方法可自动计算开花穗数,并有效量化水稻穗开花期间的开花量和日变化。卷积神经网络分割精度取决于神经网络结构,训练的样本量大,算法耗时较长。在作物冠层提取方面,Pound等[14]利用卷积神经网络(CNN)实现了小麦特征部位如根尖、穗尖、穗基部等的识别。Xiong等[15]提出了一种基于超像素分割和CNN的稻穗分割算法,能很好应用于不同品种及生育期的大田稻穗分割,缺点在于算法耗时较长。考虑到作物冠层的提取算法最终是运用于实时的光谱检测设备中,需要兼顾分割精度和处理速度。
本研究借鉴近地遥感场景的多光谱相机结构,以优化作物冠层反射光谱仪测量方法为目标,针对土壤背景对特定波段作物冠层反射光谱仪植被指数测量结果的干扰,自主设计了小麦窄带光谱图像获取装置,通过采集小麦近红外窄带光谱图像,运用SLIC和卷积神经网络算法进行冠层提取,并通过双目标定和太阳光免白板校正方法计算植被指数,为田间复杂背景下窄带光谱相机测量植被指数提供技术参考。
1 材料与方法
1.1 小麦窄带光谱图像获取装置
现有用于近地遥感场景的多光谱相机一般采用多个固定波段获取窄带光谱图像,其结构形式大多采用多个镜头配备不同的窄带滤光片,其光源一般采用太阳光,典型的设备如法国Parrot公司的Sequoia多光谱相机,美国Micasense公司的RedEdge-MX和ALTUM多光谱相机等。本研究借鉴近地遥感场景的多光谱相机结构,自制的窄带波段图像获取装置如图1所示。获取装置主要包括窄带图像采集模块、太阳光照度采集模块、图像采集软件系统、高度可调节三角支架等。
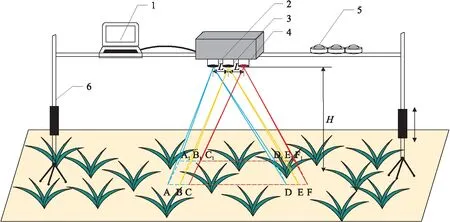
图1 窄带图像的获取装置示意图Fig.1 Schematic diagram of narrow band image acquisition device 1.便携电脑Portable computer;2.近红外窄带相机ANear infrared narrow band camera A;3.近红外窄带相机BNear infrared narrow band camera B;4.红光窄带相机CVisible red narrow band camera C;5.太阳光照度采集模块Solar intensity acquisition module;6.高度可调节支架Height adjustable bracket.
1)窄带图像采集模块:由于植被指数的构建波段以2波段和3波段居多[16-17],因此,本测量装置最多可设置3个波段。测量相机选用3个型号相同的华谷动力科技公司的全波段光谱WP-UC600工业相机,像素为3 072×2 048,帧速为每秒30帧,相机的视场角度为57.6、49.3和71.2°,以工业相机镜头内安装窄带滤光片的形式组成窄带相机。考虑后续的试验数据需要和GreenSeeker RT200获取的植被指数进行比较,故窄带图像获取装置所选窄带波段与GreenSeeker RT200一致,滤光片为光电吸收型窄带滤光片,中心波长分别为656和770 nm,带宽20 nm。GreenSeeker 光谱仪是美国Oklahoma州立大学与Ntech公司开发的目前较先进的一种地面主动式作物冠层反射光谱仪,搭载了656和770 nm两波段的测量光源,可测量归一化植被指数(NDVI),测量结果基本不受大气和天气状况的影响。测量装置相机A和相机B均安装770 nm窄波段近红外滤光片,相机C安装656 nm红光窄带滤光片。3个工业相机安装时,主光轴相互平行且间距相等,镜头平面平齐。在进行窄带图像采集之前,还需要对3个相机进行白校正,具体步骤如下:先取下3个相机的滤光片,在相机下侧放置白板,然后点击软件进行白校正,再装上滤光片即可采集窄带照片。
2)太阳光照度采集模块:选用台湾泰仕(TES)电子工业股份有限公司生产的TES-1339专业级数字照度计测试仪,测量范围为0.01~999 900 lx,测量精度为0.01 lx。
3)图像采集软件系统:图像采集软件系统在华谷动力科技公司提供的开源软件框架上自主编程完成,可实现3个相机同时采集、存储、参数设置等功能。
4)高度可调节三角支架:图像采集模块和太阳光照度采集模块安装在支架上,支架目前采用固定式三角架方式,支架高度可上下调节,同时保证图像采集模块稳定并平行于地面,避免因图像采集模块的微小振动引起拍摄图像偏差。
在实际测量过程中,相机A、B、C的拍摄范围分别为标注的蓝色、黄色和红色区域。相机A、B、C布置的间距为L,相机A、B、C拍摄区域重合率随拍摄高度H增高而增大。重合率(U)计算公式如式(1)所示。根据试验装置的实际参数(视场角θ=49.3°,间距L=0.05 m)计算出测量高度H=2.65 m,重合率为 97.94%,所拍摄区域基本重合,本文测试过程测量高度均高于2.65 m。
(1)
式中:H为冠层距离相机的测量高度(m);θ为相机的视场角(°);L为相机之间的布置间距(m)。
1.2 试验条件
试验地点位于南京农业大学白马基地(119°18′E,31°61′N)种植12个小麦品种,每个品种种植2个小区,对应2个施氮水平,分别为0 和24 g·m-2。单个试验小区面积约为0.8 m2,种植4行小麦,行距为 25 cm,共24个小区。数据采集时间为未封行分蘖期和封行拔节期,具体采集时间为2021年2月21—22日、2021年4月28—30日,天气晴朗。采集的数据类型包括:656和770 nm波段的试验小区窄带图像及对应时刻的白板图像,GreenSeeker RT200 参考试验数据等。测试地点的试验场景如图2所示。

图2 试验测试地点概况Fig.2 The general picture of test site
1.3 数据处理与分析
本文植被指数测量的技术路线如图3所示。运用本研究的窄带图像分割算法对770和656 nm波段的窄带光谱图像进行冠层提取,计算提取的双波段冠层光谱图像的灰度平均值,结合实测的双目相机白板比值ω,运用公式(7)计算方法得到NDVI。

图3 基于窄带光谱图像分割的小麦植被指数提取流程Fig.3 Technical route of wheat vegetation index extraction based on narrow band spectral image segmentation
由于GreenSeeker RT200 视场角与本研究所设计的装置不同(在测量高度为1 m时,GreenSeeker RT200测量光源的尺寸约为106 cm×4 cm),两者测量的NDVI所代表的群体大小不同,GreenSeeker RT200的测量区域是条状的,本文测量装置的测量范围是面状的,为了达到比较的目的,在实际过程中,GreenSeeker RT200对测试小区进行多次采样,以整体覆盖本研究相机的测量区域,同时,也将相机提取的面形区域进行分区,获取与GreenSeeker RT200测量区域基本一致的测试结果,使两者之间的测量结果有可比性,并验证了封行前后的相关性。GreenSeeker RT200处理方案:利用GreenSeeker RT200对每个种植小区单行小麦进行等间隔4次测量,单个种植小区可以获得16个测量数据。本文植被指数提取方法划分NDVI的方案:利用本研究提取的双波段小麦种植小区冠层窄带图像,将小区单行冠层图像等间隔划分成4等份,单个小区可获得16个等份的双波段窄带冠层图像,利用本文的植被指数提取方法计算NDVI,即可得到与Greenseeker RT200测量对象基本对应的NDVI。
此外,拍摄得到的所有照片通过 Python 3.8统一调整后生成 Jpg 格式文件,然后利用Python 3.8对图像进行分割并提取图像的特征参数。对数据进行的相关分析和回归分析均采用 Matlab 2018 软件。
1.4 基于SLIC与卷积神经网络的窄带图像分割算法
对中心波长为656和770 nm 2类窄带光谱图像进行分割处理,2类窄带光谱图像分割性能可能存在差异,选用分割性能较好的窄带光谱图像作为模板,通过双目标定(旋转平移操作)实现对另一类窄带光谱图像的分割[18]。由于作物冠层对656 nm波段有强吸收性,图像中的冠层、土壤背景和阴影相似,因此,在人工打标签时,不可避免地引入误差,导致训练的神经网络存在误差,而770 nm波段能被冠层强反射,窄带图像中冠层与土壤背景、阴影差异大,图像分析时方便打标签。本文的研究思路是:选用770 nm窄带光谱图像进行分割,将分割结果作为模板,然后通过双目标定实现656 nm波段窄带光谱图像的冠层提取。本研究采用超像素聚类的方式,将770 nm窄带光谱图像划分成局部的、具有一致性的、能够保持一定图像局部结构特征的子区域(超像素),然后将这些超像素输入特定的神经网络中,结合手工标记数据完成神经网络的训练与在线测试,实现窄带光谱图像冠层的分割提取。基于超像素与人工神经网络的冠层分割总体技术流程如图4所示。

图4 基于超像素与人工神经网络的冠层分割总体技术流程Fig.4 Overall technical flowchart of canopy segmentation based on super pixel and artificial neural network
1.4.1 超像素分割算法目前使用较多且效果较好的超像素算法是简单线性迭代聚类(SLIC)[19-20]。该算法基于颜色相似度和空间距离关系进行迭代,将图像像素进行聚类。SLIC算法构造K(K为图像像素总数)的5维特征向量,由Lab颜色空间中图像像素的3个颜色分量和直角坐标系中每个像素的二维位置坐标组成,然后构造5维向量的距离度量,对超像素进行迭代聚类。为了获得较好的分割性能和平衡算法的运行时间,需要确定超像素数和紧度,特别是与算法运行时间直接相关的超像素数K。紧度取值范围在0~40,紧度取值越小,超像素之间划分的边界越精细,本研究取值为5。
超像素数K由实际分割精度确定,评价分割精度的指标有很多,本文选取Ue(under segmentation error)作为分割精度的评价指标。Ue描述的是超过真实数据边界的像素的比例[21],公式为:
(2)
式中:Sj为第j个超像素算法生成的超像素块;G为基准区域;N为超像素块的个数;B为控制超像素分割算法生成的超像素与基准分割区域重合的百分比阈值,取值为5%;i为基准分割区域的序号;j为超像素区域的序号。
1.4.2 卷积神经网络模型构建采用的卷积神经网络框架为VGG16[22],如图4所示。VGG16是牛津大学和Google DeepMind公司合作研发的深度卷积神经网络。VGG16优点是网络结构规整,简化卷积神经网络的结构,全部使用3×3的小型卷积核和2×2的最大池化层。本研究VGG16 模型的输入为小麦窄带光谱超像素图像,输入单个超像素的尺寸不超过 224×160×3(宽×高×颜色通道),共包含 13 个卷积层、5个池化层和3个全连接层。
卷积层中采用大小为 3×3的卷积核提取图像特征,卷积层中卷积核数分别为 16、32、48、64、128。为保持特征图的尺寸为整数,卷积层2中采用了边界扩充(padding=1)。池化层卷积核的大小为 2×2,步长为 2。全连接层 1 中隐藏神经元的个数为 120,丢弃率为 0.5,全连接层 2 中隐藏神经元的个数为 120,丢弃率为 0.5,全连接层 3包含4个隐藏神经元,丢弃率为 0.5。输出层为小麦窄带光谱图像冠层、土壤、秸秆、其他。
训练过程:10张770 nm 的3 072×2 048的田间小麦窄带图像被用于离线训练VGG16神经网络。每张田间小麦窄带图像预生成1 000个超像素,手工对这些预生成的超像素进行标注,冠层超像素被标记为1,土壤超像素被标记为2,秸秆被标注成3,其他超像素被标注为0,作为真实分割效果。770 nm窄带图像训练可得到10 000个标记的超像素,按照4∶1划分训练集和测试集。VGG16神经网络训练的优化器为Adam(adaptive moment estimation),损失函数为交叉熵损失函数(categorical_crossentropy loss),训练轮次为100次。
在线测试过程:离线训练好VGG16神经网络后,即可利用 VGG16 在线分割小麦窄带光谱图像。
1)利用超像素聚类算法,将小麦窄带光谱图像生成1 000个超像素块的图像,将单个超像素图像尺寸压缩为224×160像素大小图片,输入神经网络。
2)基于 VGG16 对超像素进行分类,按照分类结果将原始超像素图片放入各自文件夹。
3)将分类后的小麦冠层超像素按照其索引号拼接为大图。
4)恢复与原始图像大小相同的分割图像。
1.4.3 分割效果的性能指标评价图像分割效果可通过图像交并比(Qseg)、召回率(Recall)、精度(Precision)以及综合评价指标(F值)评价[23-24],计算方法如式(3)—式(6)。Qseg值反映分割结果与真实值之间的相符程度,其值为0~1,Qseg值越高,分割效果越好。Precision反映被分割为冠层的样本中其真实标签为冠层的比例,是分割结果精确程度的一种表征。Recall反映真实标签为冠层的样本被正确分割的比例,衡量分割冠层区域的完整性。Precision和Recall通常呈负关,精度提高,Recall通常会降低,反之亦然。F值为综合考虑Recall和Precision的平衡指标,兼顾分割的精准程度和完整性,F值越高,分割效果越好。
(3)
式中:A(v)为由分割算法分割得到的像素类别集合,包括背景(v=0)和前景(v=1);B(v)为对应像素集的真实标签集合,包括背景(v=0)和前景(v=1);i,j为像素索引;m为图像高;n为图像宽;vi,j为第i列第j行像素的灰度值。
(4)
(5)
(6)
式中:TP为真实标签为冠层且被分割为冠层的像素个数;FP为真实标签为背景但被分割为冠层的像素个数;FN为真实标签为冠层但被分割为背景的像素个数。
1.5 阈值分割方法
阈值分割方法采用传统的灰度图像自动阈值分割方法(OSTU),将770 nm波段窄带图像转换成灰度图像,利用OSTU得到带有像素索引号的二值图,依据索引号对770 nm波段窄带图像进行操作:二值图为“0”,则770 nm波段窄带图像R、G、B三通道值赋值为0,二值图为“1”,R、G、B三通道值保持不变。
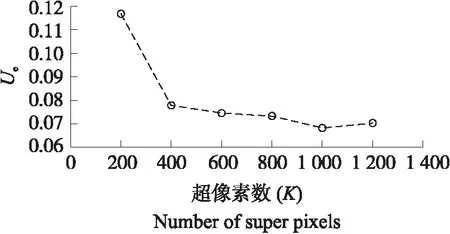
图5 不同超像素数(K)的分割精度Fig.5 The segmentation accuracy of different super-pixels(K)
1.6 免白板标定的植被指数计算方法
采用太阳光作为检测光源的作物冠层反射光谱仪具备测量视野大,被测物体光照辐射均匀性好等特点,但现有的作物反射光谱仪测量植被指数时,需要进行频繁的白板标定,过程繁复。本课题组提出了一种新的太阳光植被指数测量方法,可以克服现有利用太阳光作为检测光源的作物冠层反射光谱仪需频繁白板校准的问题[25]。研究表明,在太阳光条件下,近红外与可见光窄带波段的白板灰度值比值是恒定的,植被指数计算可免白板标定,以NDVI为测量指标,其窄带图像形式的NDVI计算公式为:
(7)
式中:ω为中心波长656 nm和770 nm 2个窄带相机拍摄的白板灰度平均值比值;V770_c为中心波长770 nm的窄带相机拍摄的小麦冠层图像的灰度平均值;V656_c为中心波长656 nm的窄带相机拍摄的小麦冠层图像的灰度平均值。
2 结果与分析
2.1 SLIC算法参数确定
为了确定SLIC算法的超像素数(K)值,将Ue作为衡量标准。10张分辨率为3 072×2 048的770 nm波段窄带图片被选择并精确标记。依次将选择的照片划分成200、400、600、800、1 000、1 200,Ue的分割精度如图5所示。结果表明,当K为 1 000 时,Ue的平均值处于局部最小值,同时考虑到K值过大,超像素的分割容易失去意义。因此,K被设置成1 000。
2.2 光谱图像分割性能评价
处理了12个小麦品种24幅770 nm波段窄带图像,对比传统阈值分割和本研究方法的冠层提取性能,结果见表1。从分割性能指标角度评价,本文提出的神经网络分割方法均优于传统的阈值分割方法。

表1 传统阈值分割方法与本文分割方法结果比较Table 1 Comparison threshold segmentation with the segmentation method
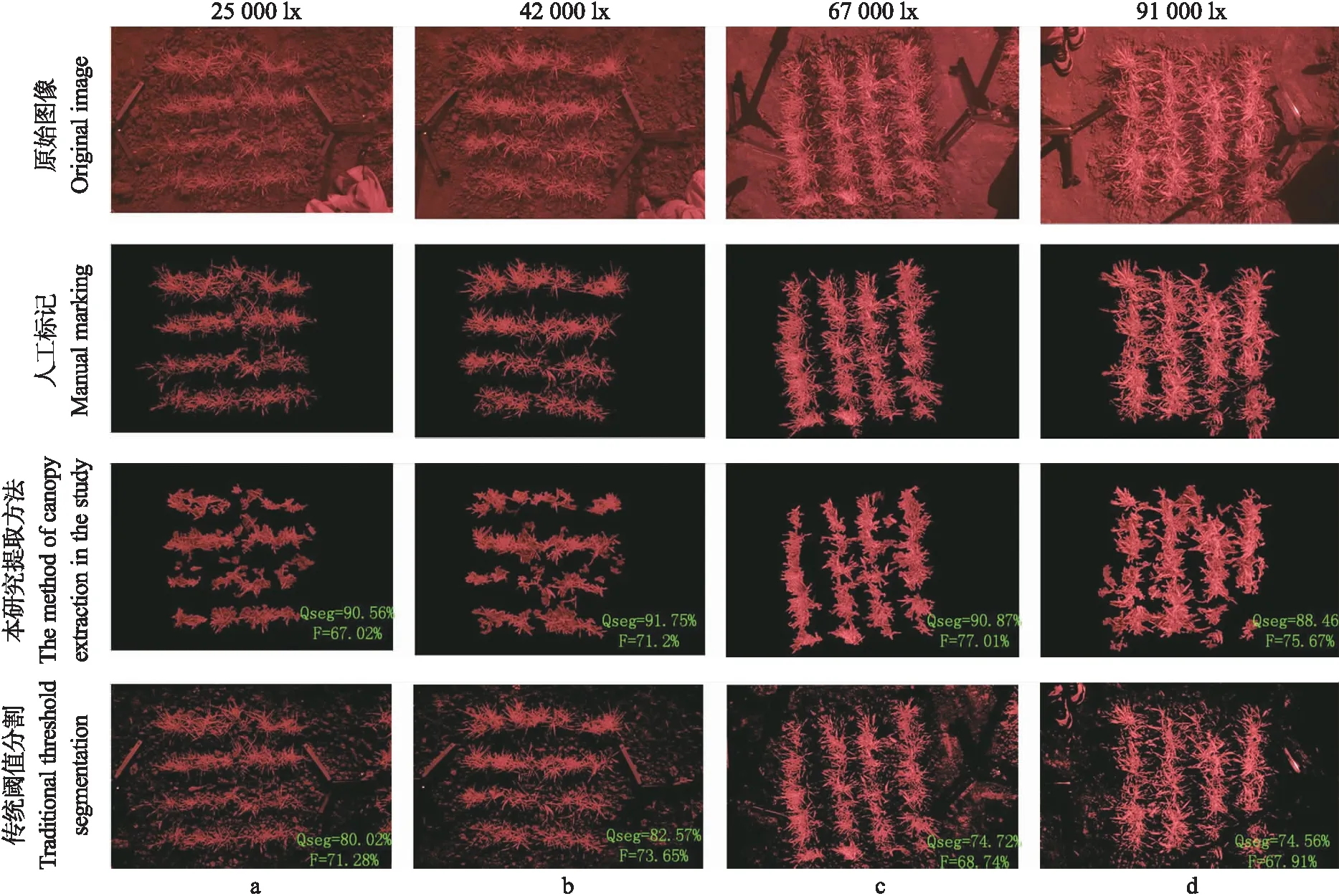
图6 本文分割方法与阈值分割方法对不同光照条件下分蘖期小麦770 nm窄带光谱图像的冠层提取效果对比Fig.6 Comparison of canopy extraction effect between segmentation method and threshold segmentation method in 770 nm narrow band spectral image of wheat at tillering stage under different light conditions a.未施氮田块1 Field block 1 without nitrogen application;b.未施氮田块2 Field block 2 without nitrogen application;c.施氮田块1 Nitrogen fertilizer field 1;d.施氮田块2 Nitrogen fertilizer field 2。下同 The same below.
图6展示了本文神经网络分割方法和传统阈值分割方法对不同光照条件下分蘖期小麦770 nm窄带光谱图像的冠层提取效果。图6-a—d对应未施氮田块1、未施氮田块2、施氮田块1、施氮田块2。拍摄时间为2021年2月21日07:10、07:25、08:05、08:25。从试验结果看,传统阈值分割后的冠层图像存在较多的噪点,背景图像的障碍物也无法剔除;而本研究的分割方法能够适应光强变化,Qseg、Precision、Recall、F值 4个分割指标都好于传统的阈值分割方法,并且能去除复杂背景干扰。因此,从统计结果和单张图片处理细节看,本研究的冠层提取算法优于传统的阈值分割算法。
图7为双目匹配后的656 nm波段冠层提取结果,利用分割后的770 nm波段的窄带图像作为基准,将其转化为二值图像,二值图像通过适当的双目标定(平移和旋转操作,由Matlab Stereo Camera Calibrator标定工具箱确定平移和旋转参数)后,与656 nm光谱图像进行“与”操作,即可得到656 nm波段的冠层提取图像。

图7 双目匹配后的656 nm波段图像冠层提取效果Fig.7 Canopy extraction effect of 656 nm band image after binocular matching
2.3 窄带相机白板响应比
利用图1窄带光谱图像的获取装置采集不同光照条件下656和770 nm波段标准白板图像,共采集140组数据。采集时的辐照强度变化范围为20 000~120 000 lx,656和770 nm波段窄带相机的光圈设置为1/16,曝光时间分别为20和10 ms。
将采集得到2波段RGB白板图像转化成灰度图像,计算2波段白板图像的灰度平均值,2波段白板灰度平均值的比值如图8所示。2波段白板灰度值具有良好的线性关系,决定系数为0.969,拟合出的双目相机白板比值ω为0.559。特别指出,图8中画圈的数据偏离拟合直线的原因是770 nm在辐照强度较强时,770 nm白板的灰度响应值趋向于饱和,因此发生偏离现象。所以在后续试验时,田间测试应该尽可能让相机响应值小于240,可以通过适当的等比例调节双波段曝光时间实现。

图8 656和770 nm白板的灰度值的比值(ω)Fig.8 The gray value ratio(ω)of 656 and 770 nm whiteboard images

图9 小麦封行前GreenSeeker RT200和本研究方法 获取的NDVI平均值Fig.9 NDVI average value of GreenSeeker RT200 and the method proposed by the study before the wheat was closed
2.4 封行前的NDVI
本研究方法和GreenSeeker RT200获取的封行前小区NDVI平均值如图9所示。本研究方法提取的小区NDVI平均值试验组(施氮水平为24 g·m-2)都高于对照组(施氮水平为0 g·m-2),说明本研究提出的植被指数提取方法的有效性。另外,由于土壤背景的干扰,GreenSeeker RT200 测量的小区NDVI平均值波动显著大于本文研究方法所计算结果。当被测冠层植被裸露较多时,由于土壤NDVI显著小于植被NDVI,GreenSeeker RT200 所测NDVI平均值小于本文研究方法所计算的NDVI。当被测冠层植被裸露较少时,GreenSeeker RT200 NDVI与本文研究方法所计算结果接近。
从图10可知:Greenseeker RT200测量的各小区NDVI的变异系数最大值、平均值、标准差分别为47.12%、33.61%、10.17%。本研究方法测量的各小区NDVI的变异系数最大值、平均值、标准差分别为18.59%、9.61%、3.88%。理论上,同一个试验小区内,作物长势比较一致,不同测量点的植被指数客观上应该不存在明显差异。但从GreenSeeker RT200 和本研究方法的NDVI测量结果来看,GreenSeeker RT200的测量数据在同一测试小区内存在较大波动,明显大于本研究方法的植被指数测量结果,这说明GreenSeeker RT200 的测量受土壤背景干扰较大,所测数据有很大的不确定性,而本文的植被指数提取方法可有效消除土壤背景干扰的影响。

图10 GreenSeeker RT200和本研究获取的各小区小麦NDVI值Fig.10 Different block NDVI values acquired by GreenSeeker RT200 and the method proposed by the study
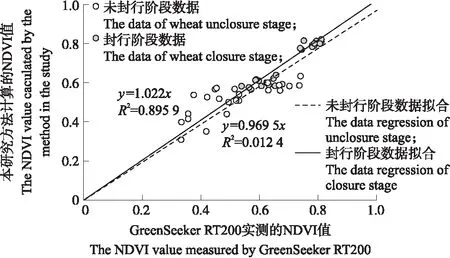
图11 本研究方法与GreenSeeker RT200 试验结果的 相关性分析Fig.11 Correlation analysis between test results of the method proposed by the study and GreenSeeker RT200
2.5 封行后的NDVI
为了对比封行前、后测量结果之间的差异,对封行前、后本研究方法与GreenSeeker RT200测量结果之间的相关性进行了分析。从图11可见:封行前的拟合决定系数仅为0.012 4,这说明在作物生长早期,土壤裸露的比例大,GreenSeeker RT200所采集的NDVI混入了大量土壤背景干扰信号,导致两者相关性显著降低。封行后的拟合决定系数为0.895 9,封行后的测量结果具有较强的相关性,这表明本研究获取的植被指数的可靠性,可以表征不同生长阶段的小麦长势状况。
3 小结
本研究提出了一种基于窄带光谱图像分析的小麦植被指数提取方法,运用窄带光谱图像分析技术和太阳光免白板校准技术,去除土壤背景对植被指数测量的干扰,主要结论如下:
1)自主设计了多镜头结构的窄带光谱图像获取装置,运用超像素分割(SLIC)和神经网络(VGG16)分类相结合的图像分析方法实现了770 nm波段小麦冠层图像的精准分割,其Qseg、Precision和F的平均值分别为90.41%、80.82%和72.73%,并且可以通过双目匹配实现660 nm波段窄带图像的精准分割。试验结果表明,本研究的窄带图像分割方法具有良好的光强适应性,并且优于传统的阈值分割方法。
2)为了克服基于太阳光源的作物冠层反射光谱仪需要白板频繁标定的缺点,采用了本课题组前期自然光条件下免白板校准的植被指数提取方法,实测了不同光照条件下双波段白板图像比值ω,比值恒定为0.559,相关性决定系数为0.969,植被指数的提取过程得到简化。
3)在作物生长早期,去除土壤背景干扰对植被指数的测量十分必要。在相同的测试田块内,GreenSeeker RT200测量的各小区NDVI的变异系数最大值、平均值、标准差分别为47.12%、33.61%、10.17%,而本研究测量的各小区NDVI的变异系数最大值、平均值、标准差分别为18.59%、9.61%、3.88%,且本方法所提取的植被指数在测试小区小麦封行后与GreenSeeker RT200的测量结果具有较高的相关性,决定系数为0.895 9。因此,本研究提出的植被指数测量方法,可以有效抑制土壤背景对植被指数测量的干扰,增加植被指数测量的可靠性。本研究可进一步拓展窄带光谱图像的分割波段,实现多种植被指数的提取,为多镜头结构的作物反射光谱仪的优化设计提供了参考。
