基于VGOS单基线的UT1测定能力评估*
2023-02-01姚当张志斌李金岭王广利
姚当 张志斌 李金岭 王广利
(中国科学院上海天文台 上海 200030)
1 引言
VLBI(Very Long Baseline Interferometry)是通过相距数千至上万公里、具有独立本振的两台或多台望远镜,同时观测并记录河外射电源辐射的信号来实现高角分辨率天文成像、高精度的天体测量及地球定向参数(Earth Orientation Parameters,EOP)确定等测量研究[1].1979年起,国际VLBI天体与大地测量服务组织(International VLBI Service for Geodesy & Astrometry,IVS)协调和组织全球VLBI测站进行国际联测,以测定和维持国际天球/地球参考架和EOP[2-3].从1981年开始,IVS每周组织2次基于5-8台站的S/X双频波段24 h观测,因观测数据量大及邮寄至相关处理中心的时间长,其测量结果一般滞后3-15 d.世界时(Universal Time,UT1)是EOP中变化最快且难以精确预报的参数,IVS在20世纪80年代初开始利用单基线开展1 h的UT1加强观测(Intensive observation,INT1),其得到的UT1精度与24 h观测接近[4-5],之后便作为快速获取UT1的重要方式进行每日观测.随着观测站的调整,基线长度的增加,加强观测的UT1测量精度逐渐提高,目前,IVS实测的ΔUT1(UT1-UTC(Universal Time Coordinated))与IERS (International Earth Rotation Service) C04事后精密序列的差异在10µs水平[6-7].
21世纪开始,全球VLBI测站及相关处理系统经过多次升级后,其观测能力、产品时效性和精度等显著提高,但依然面临设备老化、射频干扰(Radio Frequency Interference,RFI)及运维费用不足等问题,且VLBI测量精度主要受限于大气和源结构影响[8-9].为此,IVS提出了采用直径约12 m且转速快的天线和2-14 GHz宽频带接收的VLBI全球观测系统(VGOS)以满足全球大地测量观测系统(Global Geodetic Observing System,GGOS)的1 mm和0.1 mm/yr的站址精度需求,同时实现连续、快速的EOP测定能力[10].图1为截至2021年全球VGOS站建设情况,其中上三角标记为已常规运行站,圆圈标记表示台站已建设且处于运行测试中,而正方形标记表示即将在该处建设VGOS台站.可知全球已有9个VGOS台站实现常规运行,11个台站处于测试中(包括我国的上海佘山和乌鲁木齐南山两个VGOS台站),9个台站在规划建设中.相比于老一代VLBI系统的单右旋圆极化观测模式,VGOS采用双极化接收记录,通过对两路极化数据的校准,可有效提高条纹的信噪比和相位稳定度[11-12].

图1 VGOS全球建站现状,△为已运行,°为测试,□为计划建站.Fig.1 The distribution of VGOS,△: operational,°: antenna built,□: in planning.
基于已建成的VGOS台站,IVS已陆续组织开展了一些测地观测试验.2017年,7个VGOS台站参加了连续15 d 24 h加密观测,群时延精度在2 ps左右[13].综合2017年至2019年的VGOS观测数据,可获得亚毫米的站坐标精度[14],印证VGOS天线的小型化、高转速及宽带特性可提升时延测量精度.在UT1加强观测上,可有效提高观测数目、改善天区分布,更有效分离钟差和湿大气延迟.Haas等[15]2021年利用Onsala双VGOS天线与Ishioka站开展的加强观测,相比于传统的INT1观测,其得到的UT1形式精度可改善3-4倍.
本文利用INT1和VGOS同时段观测数据进行分析,评估VGOS测站开展的加强观测对UT1的测定能力.第2节介绍了VGOS数据及相应处理方法,第3节对INT1与VGOS观测结果进行了对比,研究了极移误差对两者的影响,同时分析了VGOS 1 h和30 min的UT1测量结果,并且分析了我国乌鲁木齐南山13 m和上海佘山13 m VGOS的UT1测定能力,第4节对分析结果进行总结.
2 数据与处理
传统VLBI测站的UT1加强观测每天1次,其中Kokee (简称Kk)和Wettzell (简称Wz)每周一至周五18:30-19:30 (UT)开展INT1观测.在2020年,IVS组织了22次2-5个VGOS测站参与的测试观测,2021年起,与Kk和Wz分别并置的2个VGOS台站(KOKEE12M-K2,WETTZ13S-Ws)每隔2-7 d在18:30-19:30 (UT)开展基于VGOS的UT1加强观测任务.表1为INT1与VGOS单基线UT1加强观测的配置对比,可知VGOS天线的转速明显优于INT1,观测频段上,INT1在S和X波段进行观测,S波段通过6个通道记录,每个通道带宽为4 MHz,X波段则通过8个通道记录,VGOS则是在4个频段,每个频段8个通道、每个通道带宽为32 MHz下观测记录,此外VGOS记录了双极化数据,数据量急剧增多,较难实现高频次观测.

表1 INT1与VGOS单基线测站配置对比Table 1 The baseline comparison between INT1 and VGOS
Kk-Wz基线和K2-Ws基线在2021年的观测情况如图2所示,从1月到10月,K2-Ws基线共观测了71次,Kk-Wz基线共观测了174次.因VGOS天线转速快、记录频段多,有效降低了目标的观测时间及天线的切换时间,K2-Ws基线1 h的有效观测数比Kk-Wz基线平均高出1倍.实际上,若VGOS 4个波段的16通道全部记录,且不限制目标的最短观测时长(40 s),1 h有效观测数将更多.为评估对比两基线的UT1加强观测,本文挑选了61次同一时段内两基线都有观测的数据进行比较分析.

图2 2021年Kk-Wz与K2-Ws观测情况Fig.2 The observation of Kk-Wz and K2-Ws in 2021
不同于S/X的右旋圆偏振,VGOS采用4波段双线极化记录方式,因此相关处理环节,需对4种极化组合进行相关处理,后处理中,需对4组极化组合分别进行条纹拟合,校准各个通道的残余相位以及不同极化链路的相位与时延偏差,从而获得更精确的多通道群时延/时延率[16].图3左右分别展示了经相关和后处理后的Kk-Wz基线和K2-Ws基线的群时延精度(σKk-Wz,σK2-Ws)统计的柱状图,可知Kk-Wz基线在X波段的群时延精度分布更弥散(0-130 ps),特征精度(柱状图峰值)在23 ps处,而K2-Ws基线的群时延精度分布则集中在0-15 ps范围,特征精度在3 ps.

图3 Kk-Wz与K2-Ws观测群时延精度对比Fig.3 The group delay accuracy comparison between Kk-Wz and K2-Ws
带宽综合后的群时延经模糊度消除、钟跳修正等处理后,利用最小二乘方法可对所需参数进行求解.解算时,射电源初始坐标采用ICRF3 (The 3rd realization of the International Celestial Reference Frame)星表,Kk与Wz的站坐标和站速采用ITRF2014 (International Terrestrial Reference Frame at epoch 2014.0)结果,而对于K2与Ws,根据24 h观测的并置站相时延可计算得到.表2为经过相时延计算后K2与Ws在ITRF下分别与Kk、Wz的三维坐标差异(Δx、Δy、Δz),因并置站相距近,K2与Ws的站速度分别和Kk、Wz相同.EOP先验值从IERS C04文件中获取.对于单基线观测,仅估计站间钟差、各站天顶湿时延和ΔUT1.

表2 基于相时延得到的基线地心矢量Table 2 Baseline geocenteric vector obtained by the phase delay
3 结果与讨论
3.1 K2-Ws与Kk-Wz基线
目前,IVS的多家分析中心将其UT1加强观测的解算结果上报给IVS,其中法国巴黎天文台VLBI分析中心(Paris Observatory Analysis Center,OPAR)和俄罗斯应用天文学研究所分析中心(Institute of Applied Astronomy Analysis Center,IAA)会同时上报传统加强观测和基于VGOS的加强观测结果,维也纳分析中心(The Special Analysis Center in Vienna,VIE)也会在其产品网站上发布加强观测结果(https://www.vlbi.at/index.php/pr oducts/).图4为本文及各分析中心基于两基线测量得到的ΔUT1与IERS C04序列中的ΔUT1插值至对应时刻的差异(δUT1)情况,其中的△为Kk-Wz基线对比结果,*为K2-Ws基线对比结果,误差棒为ΔUT1的形式误差.从图可知,总体上Kk-Wz基线与K2-Ws基线在相同观测时段下δUT1在误差范围内吻合,此外,可发现OPAR提供的K2-Ws结果存在较明显的偏差,很有可能其解算时采用的初始台站坐标存在较大的偏差.
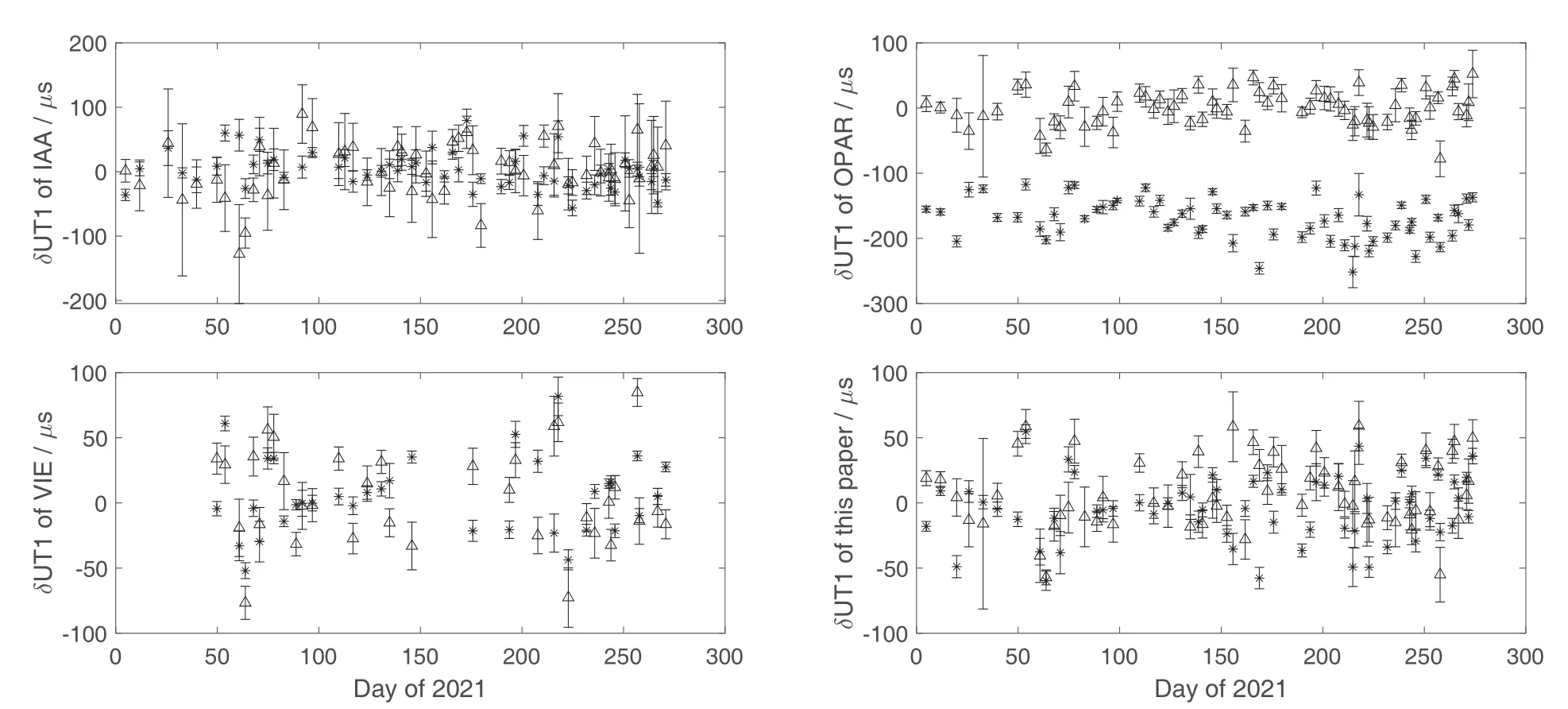
图4 不同分析中心测定的ΔUT1相对C04序列的差异.△为Kk-Wz,*为K2-Ws.Fig.4 ΔUT1 time series of different analysis centers w.r.t.C04.△represents the Kk-Wz baseline,and * represents the K2-Ws baseline.
表3给出了各个分析中心加强观测结果的统计信息,包括相对C04序列的平均偏差,平均偏差的RMS (Root Mean Square),平均形式误差等,其中OPAR的结果,在扣除偏差平均值后,其RMS则为30.8µs.因OPAR、IAA、VIE在解算时,采用EOP的预报值作为先验值,而本文先验值则为IERS C04的事后精密序列,极移先验值要优于其他分析中心,以至整体结果较优.通过本文处理的K2-Ws与Kk-Wz的结果可知,K2-Ws得到的ΔUT1形式精度比Kk-Wz提高1倍[17],且在与C04序列的一致性上,略优于Kk-Wz基线.

表3 不同分析中心的δUT1统计结果Table 3 The statistical δUT1 results of different analysis centers
对于加强观测,由于仅对站间钟差、各站天顶湿时延和ΔUT1进行估计,在射电源坐标、站坐标相对准确情况下,初始极移的偏差将是影响ΔUT1的主要误差源之一,因此本文定量研究了不同的先验极移精度对于ΔUT1的影响.图5为Kk-Wz和K2-Ws分别在0.1 mas、0.5 mas和1 mas极移偏移误差下得到的ΔUT10.1、ΔUT10.5和ΔUT11与极移未偏移得到的ΔUT1对比(DUT1=ΔUT1-ΔUT1offset,其中offset可为0.1、0.5、1),该值可反映出先验极移偏差对于ΔUT1估计误差的传递关系.图5的上两图为极移X分量(Xpole)影响,下两图为极移Y分量(Ypole)的影响.从下图可知,Ypole的误差与ΔUT1估计存在较为明显的线性传递,其每100µas的误差将对Kk-Wz测定的ΔUT1引入1.3µs左右的偏移,对K2-Ws测定的ΔUT1引入1.1µs左右的偏移.对于Xpole,K2-Ws数据反映出的依赖关系的稳定性明显优于Kk-Wz基线,其每100µas的误差将对K2-Ws测定的ΔUT1引入1.7µs左右的偏移.若Xpole和Ypole均存在100µas的误差,则误差传递至K2-Ws基线的ΔUT1的误差则为2.8µs/100µas,同Nothnagel分析INT1数据得到2.3µs/100µas的结论接近[18].
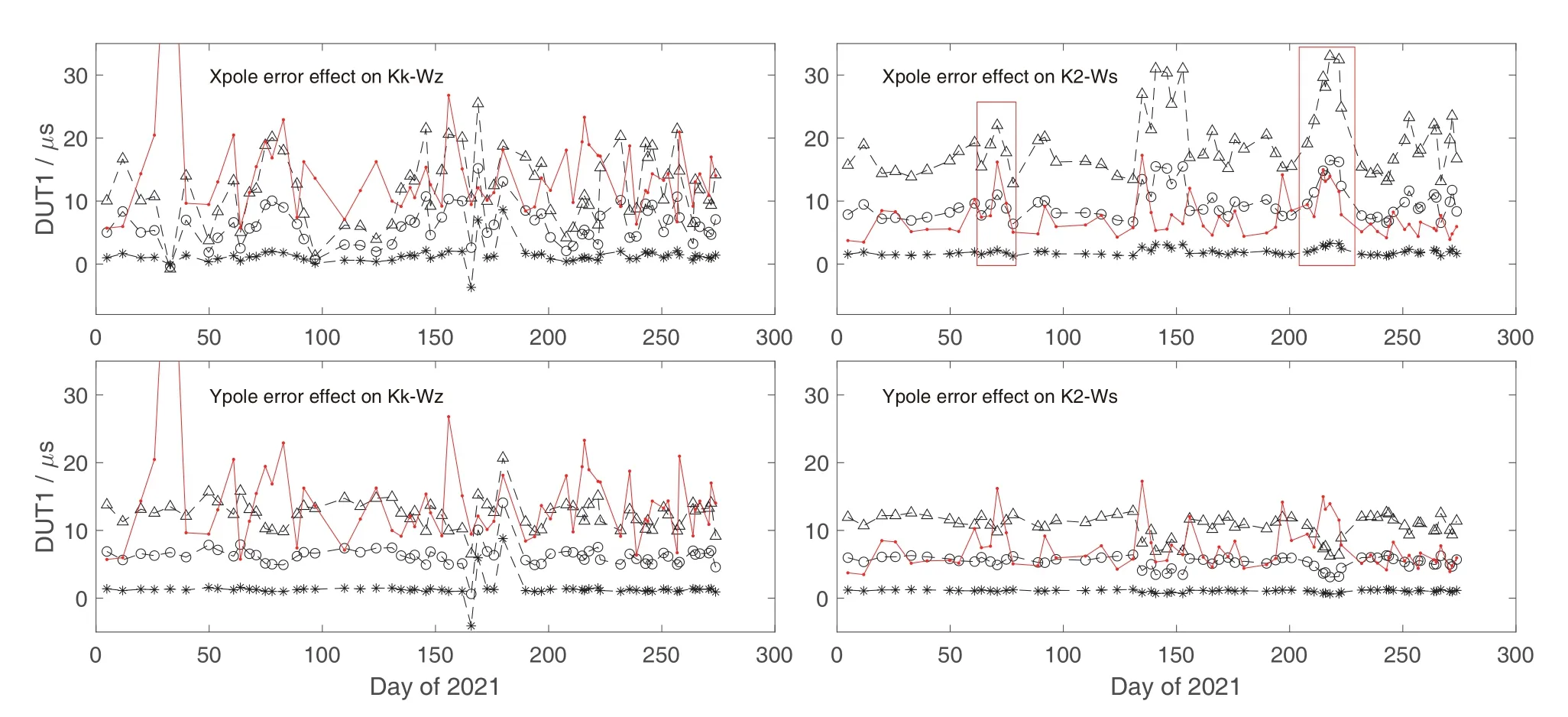
图5 极移误差对Kk-Wz基线及K2-Ws基线测定UT1影响,Δ线表示1 mas偏移,°线表示0.5 mas偏移,*线表示0.1 mas偏移,红线为ΔUT1形式精度.Fig.5 The impact of errors in polar motion on UT1 for Kk-Wz and K2-Ws,the line of Δ,° and * represent the pole offsets of 1 mas,0.5 mas and 0.1 mas,and the red line is formal error of ΔUT1.
此外,根据ΔUT1形式精度抖动可知,K2-Ws观测比Kk-Wz稳定,且形式精度与极移误差影响的相关性也相对明显,如图5右上图的矩形框区域.对于Kk-Ws观测,因形式误差不稳定,受极移误差的影响波动大,且部分观测时段下,如第32 d、100 d,即使存在较大极移偏差DUT1的变化也非常小,主要因其有效观测数目少(12个),导致射电源天区分布差,极移的偏差被站间钟差和湿大气所吸收,进而未能在ΔUT1中体现.K2-Ws观测在形式精度相对较小时受极移误差的影响比较稳定,而形式精度较差时极移误差将对ΔUT1产生较大的影响,如第70 d前后(台站环境湿度大)和215 d前后(Ws仰角都在30°以内),这在图4的同一时段下得到体现,不同分析中心存在较大差异.
图6为K2-Ws基线30 min和1 h观测情况下测得的UT1对比情况,其中上三角表示1 h结果,右三角表示前30 min结果,圆圈表示后30 min结果.从图可知30 min与1 h测量结果整体变化趋势相一致.表4给出了基于18:30-19:30、18:30-19:00、19:00-19:30数据集结果的统计信息,可知,在与C04一致性上,三者得到的结果差异不大,因30 min观测数减少,形式精度增大至11.1µs,整体上仍优于Kk-Wz结果.若VGOS测站采用最高记录速率时(32 Gbps),30 min观测在减少数据量的同时,也保证了测量精度,可超快速测量UT1.

表4 K2-Ws不同观测时长δUT1统计结果Table 4 The statistical δUT1 results of different observed time on K2-Ws baseline

图6 K2-Ws 1 h与30 min测得ΔUT1相对于C04的时间序列Fig.6 ΔUT1 time series of one hour and half hour observed by K2-Ws w.r.t.C04
3.2 S6-U6基线
2021年初,上海佘山13 m(S6)和乌鲁木齐南山13 m (U6)建成,截至7月,同国内其他台站共开展了8次24 h VGOS测地观测.本文利用18:30-19:30(UT)时段两站的观测数据对UT1进行估计分析,其与K2-Ws的加强观测的比较如图7所示.因S6-U6基线长度为K2-Ws基线的1/3,对应UT1精度要低于K2-Ws基线,但两基线相近时刻所测结果的趋势保持一致.表5给出了S6-U6基线8次加强观测情况及统计结果,可知S6-U6基线测得的ΔUT1与C04的平均偏差在-19.2µs,RMS为46.2µs,平均形式精度为17.7µs,相比于佘山25 m和南山25 m基线的15-40µs形式精度,整体得到提升[19].

图7 K2-Ws与S6-U6实测结果对比Fig.7 ΔUT1 time series of K2-Ws and S6-U6 w.r.t.C04

表5 2021年S6-U6基线δUT1结果Table 5 The δUT1 result of S6-U6 in 2021
4 总结
截至2021年,全球已有9个VGOS观测站开展常规观测,其中K2-Ws的UT1加强观测已实现例行化观测服务.本文首先针对2021年同时段K2-Ws与Kk-Wz基线的数据进行了比较分析,结果表明,VGOS 1 h观测测得的ΔUT1平均形式精度为7.4µs,较传统INT1基线提高1倍,且与IERS C04的一致性上,K2-Ws所测的ΔUT1相对于IERS C04序列偏差的RMS为25.3µs,略优于Kk-Wz的28.2µs.其次,分析了初始极移的精度影响,表明,K2-Ws基线因1 h观测数目多,受极移初始值误差的影响比Kk-Wz稳定,每100µas的极移误差将对ΔUT1引入2.8µs的偏移.然后对K2-Ws 30 min的观测数据进行分析,可知数据记录量减半的同时,其测定的ΔUT1与1 h观测相当,可用于UT1超快速获取.
最后,针对国内于2021年初建成并处于测试阶段的VGOS观测站,基于8次24 h VGOS测试数据,开展了乌鲁木齐南山13 m和上海佘山13 m单基线测定UT1研究,其测量得到UT1 RMS为46.2µs,后续可长期组织开展单基线1 h UT1加强观测,以检验其测定能力.
致谢感谢上海天文台舒逢春老师提供上海佘山和乌鲁木齐南山VGOS站的相关处理结果.