基于LSTM和残差网络的雷达有源干扰识别
2023-02-01邵正途许登荣徐文利王晗中
邵正途, 许登荣, 徐文利, 王晗中
(1. 空军预警学院信息对抗系, 湖北 武汉 430019; 2. 空军预警学院雷达士官学校, 湖北 武汉 430300; 3. 国防科技大学电子科学学院, 湖南 长沙 410073)
0 引 言
雷达面临电子对抗环境日益复杂,各种新型雷达干扰样式不断涌现的挑战[1-2]。有源压制干扰通过释放干扰信号压制雷达目标回波,极大地影响了雷达对目标的探测,给现代雷达的作战能力带来了极其严峻的挑战。其主要干扰样式包括窄带干扰、宽带干扰、梳状谱干扰和扫频干扰。现代雷达为进行有效地对抗,其先决条件就是对干扰信号正确分类识别,推测掌握干扰方作战意图,提升雷达系统对干扰环境的感知能力。因此,干扰类型识别作为抗干扰技术的重要环节一直是研究的热点[3-4]。目前雷达干扰识别的主流方法是基于信号特征提取的分类方法。影响这类方法性能的主要因素包括两个方面,一个是特征集的选取及提取,另一个是分类器的选择。在干扰信号特征的选取及提取方面,由于各类干扰信号具有很强的相似性,单指标特征难以有效完成分类任务,通常采用提取信号时域、频域、变换域等多维度的多指标特征综合识别方法,如时频域内的矩峰度、矩偏度、包络起伏度、噪声因子等特征[5-8]、奇异谱特征[9]、双谱特征[10],这样一定程度上增加了计算复杂度,造成算法应用泛化能力弱。在分类器的选择方面,采用较多的是决策树、K均值聚类[11]、神经网络[12]、支持向量机[13]分类器。以上这些方法的性能优劣主要依赖于特征提取方法的选择,耗时且需要专家经验的辅助,尤其是变换域特征运算量较大,常规分类器分类性能提升空间有限,在强噪声环境下识别率较低。
近年来,以卷积神经网络(convolutional neural networks, CNN)为代表的深度学习方法利用其自动特征提取和学习能力在图像识别、语音处理等模式识别领域得到广泛应用[14-15],也被相关学者用于雷达及干扰信号的分类识别研究中[16]。文献[17]基于一维CNN构建雷达干扰信号识别模型。文献[18]基于干扰信号的时频图像利用二维CNN和改进模型,自动学习时频图的特征实现干扰信号的分类。文献[19]利用CNN对脉冲压缩处理前后的两个包络图和接收波束信号的时频图构成的多维特征图完成干扰分类。以上方法取得了较好的分类效果,但有些只是利用浅层的网络结构搭建模型,并没有发挥出CNN特征提取的强大能力。通常来说,网络层数越深,提取数据隐藏特征的能力越强,但容易出现网络性能退化问题,残差网络很好地解决了这一缺陷。文献[20]基于扩张残差网络实现雷达辐射源信号识别。文献[21]通过集成残差块和非对称卷积块提取干扰信号特征,在低信噪比下取得了较好的识别效果。
CNN能够有效抽取高维数据的隐藏特征,然而循环网络可以学习到历史信息,研究表明循环网络更适合处理时间序列,结合CNN和循环网络可以发挥两者的优势。文献[22]利用卷积长短时深度神经网络对辐射源信号的原始时间序列数据进行识别,其模型性能在识别能力上超过单纯的长短时记忆(long short-term memory, LSTM)模型。文献[23]利用CNN和LSTM搭建的深度网络对振动信号进行分类识别。
针对上述情况,本文在前人研究的基础上,提出一种残差CNN结合LSTM的雷达有源干扰识别方法。以干扰信号原始时域波形数据作为模型输入,利用一维CNN网络进行信号特征信息提取,残差网络提高模型训练深度避免模型梯度消失,LSTM网络学习特征时序信息,最终实现信号分类识别,并与单纯的残差网络和CNN-LSTM等其他深度学习算法进行对比,验证不同噪声环境下的识别准确度与计算复杂度。全文共3个部分,第1部分介绍雷达有源干扰信号模型的建立;第2部分在CNN、残差网络、LSTM网络分析的基础上,介绍本文提出的残差CNN-LSTM网络模型搭建的具体方法和结构参数;第3部分是仿真试验,通过构建信号数据样本验证模型的有效性,并与其他深度学习方法进行对比分析。
1 雷达有源干扰信号建模
雷达有源干扰分为压制干扰和欺骗干扰两大类,其中压制干扰主要包括窄带干扰、宽带干扰、扫频干扰、梳状谱干扰[24]。本文主要针对这4种典型的噪声压制干扰信号类型进行分类识别。
窄带噪声干扰一般利用噪声调幅干扰来产生,其表达式为
J(t)=[U0+Un(t)]cos(2πfjt+φ)
(1)
式中:U0是载波电压;Un(t)是零均值高斯白噪声;fj为干扰中心频率;φ为干扰相位在[0,2π]上均匀分布,且和Un(t)是相互独立的随机变量。
宽带噪声干扰一般用噪声调频干扰来产生,其表达式为
(2)
式中:u(t)为零均值平稳随机过程;KFM是调频斜率;Uj是干扰的振幅。
利用噪声调频波形产生梳状谱干扰的表达式为
(3)
式中:fj为梳齿出现的频率点;m为频率点数目。
扫频干扰利用一个相对较窄的窄带信号在一定的周期内重复扫描某个较宽的干扰频带产生,表达式为
J(t)=Ujcos[2πfj(t)t+φ]
(4)
式中:fj(t)是干扰信号载频,随时间呈现周期性变化。
图1所示为4类干扰信号在干噪比(jamming-to-noise ratio, JNR)为10 dB时的时域波形,从图上可以看出各类噪声压制干扰信号时域上差异不大,人工分辨较为困难。因此,对于时域波形相似度比较高且对噪声比较敏感的4类干扰信号,本文利用基于CNN的深度学习模型对干扰信号进行识别。


图1 4类干扰信号时域波形图Fig.1 Time-domain waveform diagram of four types of jamming signals
2 深度学习模型
2.1 一维CNN
CNN是一种具有表征提取和学习能力的前馈神经网络,主要由卷积层、池化层和全连接层等组成,在图像识别等二维数据分类问题中得到了广泛的应用[25]。卷积层通过卷积核对输入数据进行特征抽取,在训练过程中不断拟合数据局部隐藏特征。池化层对数据进行下采样降维处理,完成参数稀疏降低数据量。由于输入数据与卷积核尺寸都比较大,权值和偏置等网络参数较多,常用参数共享方法,使网络自由参数的个数减少,加快网络训练过程。本文讨论的干扰信号时域数据为一维时间序列数据,因此采用一维CNN,其运算公式为
(5)

最大池化公式为
(6)

2.2 残差CNN
随着CNN模型层数的增加,多个隐藏层之间会带来特征丢失、信息不完整等问题,从而出现梯度消失现象,降低网络性能。残差网络解决这一问题的主要做法是在卷积处理非线性变换的同时增加线性直达通路[26-27]。其基本单元结构如图2所示。

图2 残差网络结构Fig.2 Residual network model
图2中可以看出,在输入xl和输出xl+1之间,中间的两个卷积层前后设置了越层连接,将浅层的输入直接连接到端部位置,由于该直达越层连接权重为1,所以可以避免在层层映射的过程中,由卷积层非线性处理F(xl)的权重小于1而导致的网络梯度消失问题。通过残差操作,在增加深度的同时也能保证网络性能不会退化。本文所使用的残差网络单元结构如图3所示,3个卷积层和1个跳线连接构成一个残差单元。

图3 残差CNN网络单元结构Fig.3 Residual CNN network cell structure
2.3 LSTM网络
循环神经网络是一种处理复杂序列数据中经常用到的深度学习算法,网络是以序列数据为输入,在序列的演进方向上进行递归处理,且所有循环单元按链式连接的神经网络,可以处理序列结构的信息,体现信息在时间维度上从前往后的传递和积累,能够扩展时间特征。常规的循环神经网络每个时刻的隐藏层状态由当前输入和前隐藏层的状态同时决定,记忆容量有限而且容易造成梯度消失的问题。LSTM网络在常规循环神经网络的基础上引入了遗忘门、输入门、输出门单元来控制LSTM单元的状态迭代,通过门系数来控制记忆信息、输入信息的获取和输出信息的传输,提高分类网络的效能和稳定性[28-30],如图4所示。

图4 LSTM单元的基本结构Fig.4 LSTM cell structure
LSTM与一般循环神经网络的不同主要在于递归网络隐藏状态的计算,t时刻LSTM单元状态Ct由舍弃单元无用信息和保留部分有用信息两部分决定,该时刻隐含层的状态ht由输出门挑选Ct的有用信息得到,其计算式分别为
ht=ottanh(Ct)
(7)
(8)

ft=σ(Wf×[ht-1,xt]+bf)
(9)
it=σ(Wi×[ht-1,xt]+bi)
(10)
ot=σ(Wo×[ht-1,xt]+bo)
(11)
(12)
式中:Wf、Wi、Wo为各门控节点的权值矩阵;Wc代表记忆权重;bf、bi、bo为各门控节点的偏置;bc代表记忆单元偏置;σ代表sigmod函数。
LSTM通过输入门、遗忘门、输出门这3个门实现了其特殊的长短期数据记忆功能,使得该模型更适合学习前后关联和连续性的数据的特征。干扰信号时域数据具有时间连续性,选用具有记忆功能的LSTM模型符合本文研究的干扰信号分类要求。
2.4 干扰信号分类模型
本文构建基于残差CNN和LSTM的深度学习分类网络结构如图5所示,网络结构参数如表1所示。模型共有33层,其工作过程如下:
步骤 1由于LSTM层的输入为序列数据,所以首先将干扰信号时域数据进行序列折叠输入后续网络层;
步骤 2通过一次卷积和两次残差块操作,再经过最大池化层和扁平层将数据进行降维和压平;
步骤 3将扁平层输出数据进行序列展开输入两层LSTM层进行时序信息提取,最终得到提取的特征。
步骤 4利用Softmax输出概率值,根据概率分布确定信号的类型,并根据标签输出正确率。

表1 网络结构参数

图5 残差CNN-LSTM深度学习网络模型Fig.5 Residual CNN-LSTM deep learning network model
3 仿真试验
3.1 试验流程
基于LSTM和残差CNN的深度学习网络的干扰信号识别试验流程如图6所示,干扰信号训练和测试样本数据产生以及网络模型的搭建、训练和测试均在Matlab2019环境下进行,操作系统为Windows 7旗舰版64位操作系统,CPU为Inter(R) Core(TM) i7-1165G7 2.80 GHz,GPU为NVIDIA GeForce MX450,运行内存为16.0 GB。

图6 基于深度学习网络的干扰识别框架Fig.6 Jamming recognition framework based on deep learning network
3.2 仿真条件
本文基于干扰信号的时域仿真数据,构建一维残差CNN与LSTM的干扰信号识别模型。对窄带干扰、宽带干扰、梳状谱干扰、扫频干扰4种信号,在JNR为-10~10 dB的范围内,JNR间隔为2 dB,每类信号每个JNR下产生100个训练样本。干扰信号采样频率fs为100 MHz,干扰持续时间τs为30 μs,4类信号的参数如表2所示,所有参数在取值范围内随机选取。对算法进行测试时,在每个JNR下各产生100个测试样本用于测试。

表2 4类信号参数设置

续表2
3.3 仿真结果
为提升训练效率,实验中设置的迭代次数为30次,每批次训练样本数量为500。同时为了验证本文提出的残差CNN-LSTM深度学习模型对干扰信号识别的有效性,将本文方法与残差CNN和CNN-LSTM网络两种方法进行对比分析,其网络结构分别如图7和图8所示,模型中的参数和表1中所列相同。

图7 残差CNN网络模型Fig.7 Residual CNN network model

图8 CNN-LSTM网络模型Fig.8 CNN-LSTM network model
通过500次蒙特卡罗实验得到的信号识别率结果如图9所示,分别为残差CNN-LSTM、残差CNN、CNN-LSTM在不同JNR下测试集中的准确率。从图9中可知,在测试过程中,3种深度学习网络对信号的识别准确率均随JNR的增大而提高,其中综合利用残差和LSTM的深度学习网络对于各JNR环境下的干扰信号识别性能要普遍优于其他两种网络。测试集中在JNR为0 dB的强噪声环境下,残差CNN-LSTM方法对4种干扰信号识别准确率均大于98.3%,其中对宽带干扰和窄带干扰的识别率可达100%。残差CNN网络的表现略差,在JNR为0 dB时,对4种干扰信号识别准确率均大于95.2%,但在更低JNR环境下和残差CNN-LSTM网络性能差距拉大,-4 dB下最低识别率仅为78.5%,残差CNN-LSTM网络表现更为稳定,4类信号最低识别率为91.2%。CNN-LSTM网络的准确率表现最差,在JNR为0 dB的环境下,4种干扰信号准确率最低为90.8%。说明通过残差网络和LSTM网络的引入,CNN网络的表现更为稳定,鲁棒性更好,强噪声环境下准确率有明显提升。
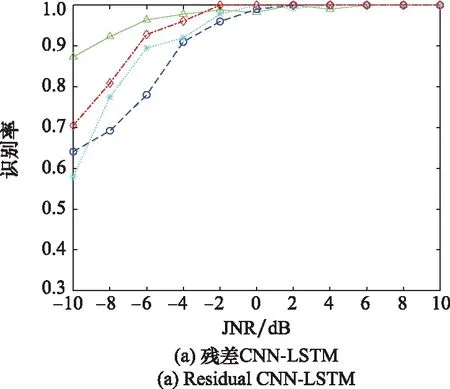

图9 不同JNR环境下4类信号识别准确率Fig.9 Recognition accuracy rate of four types of signals under different JNR environments
图10为3种深度学习网络在训练过程中准确率、损失率变化曲线的比较。可以看出,3种网络均具有较稳定的网络性能,其中本文提出的残差CNN-LSTM网络的收敛速度最快,在相同的迭代次数下,准确率和损失率均优于其他两种网络结构下的数值,也体现了在深层模型下残差网络模型和LSTM网络模型结合的优势。

图10 3种网络测试集学习损失率、准确率变化图Fig.10 Learning loss rate and accuracy rate change diagram of three network test sets
3.4 模型可视化
为直观呈现残差CNN-LSTM模型各层数据的分布情况和网络迭代性能,采用T-分布随机近邻嵌入(T-distributed stochastic neighbor embedding, T-SNE)方法对各个层输出的高维特征进行降维,并在二维平面进行可视化。图11为4 400个训练样本经卷积层、LSTM层输出后经过降维处理后的散点分布图。图11中,序号1~4分别代表窄带干扰、宽带干扰、梳状谱干扰和扫频干扰4类信号,横纵坐标轴表示数据降维后的两个特征。从图11可知,从原始信号的第一层卷积层提取的特征难以区分不同的干扰类型(见图11(a))。随着网络层的不断迭代,不同网络层学习出来的数据特征逐渐呈现出独特的聚集分布,最终实现准确可靠的分类(见图11(i))。

图11 训练集样本各网络层T-SNE降维可视化情况Fig.11 T-SNE dimensionality reduction visualization of each network layer of the training sets sample
3.5 计算复杂度分析
神经网络的复杂度主要包括空间复杂度和时间复杂度,空间复杂度是指网络可学习参数量,主要由卷积层、LSTM层和全连接层决定。时间复杂度从每轮训练迭代时间和单个样本平均识别时间两方面进行分析。在500次蒙特卡罗实验统计平均情况下,本文采用的残差CNN-LSTM和残差CNN、CNN-LSTM的复杂度对比如表3所示。

表3 模型复杂度对比
由表3可知,残差CNN-LSTM的空间复杂度和时间复杂度与CNN-LSTM基本一致,由于增加了LSTM层,网络结构更为复杂,其参数量相比残差CNN有一定增加,空间复杂度高于残差CNN,每轮迭代耗时和平均识别耗时也略高于残差CNN。但从表3中数据来看,本文提出的残差CNN-LSTM在空间复杂度和时间复杂度与残差CNN、CNN-LSTM相比差别不大,识别耗时均在ms量级,且残差CNN-LSTM模型能够取得更高的识别正确率。
4 结 论
本文提出了基于一维残差CNN和LSTM网络结合的干扰信号分类方法。该方法直接利用干扰信号时域数据提取信号高维抽象特征,避免了人为提取信号特征的预处理环节,可以实现对4类雷达有源噪声干扰信号的有效分类,在低JNR下也能提供可靠的识别率,4类信号在JNR为0 dB的强噪声环境下信号识别准确率均高于98.3%。
本文所提方法通过在模型中引入残差网络提高了网络深度,利用LSTM网络对时序信息的提取能力提高了模型的抗噪性能。通过对3种深度学习网络的对比试验表明,残差CNN-LSTM网络在各JNR环境下的分类性能和鲁棒性最佳,在相同的迭代次数下,准确率和损失率均优于其他两个网络结构下的数值,体现了在深层模型下残差网络模型和LSTM网络模型结合的优势。