基于改进网侧控制策略的半直驱风电系统FFRT研究
2023-01-31郭江涛陈烁黄丽玲
郭江涛,陈烁,黄丽玲
(明阳智慧能源集团股份公司, 广东 中山 528437)
0 引 言
半直驱永磁同步风电系统(Semi-Direct Drive Permanent Magnet Synchronous Generator, PMSG) 兼 具直驱风电系统可靠性和双馈风电系统结构紧凑的优势,半直驱永磁同步风电系统与直驱风电系统和双馈风电系统的主要区别在于发电机和齿轮箱,半直驱永磁同步系统发电机采用中速永磁同步发电机,与直驱风电系统相比,在体积和重量上小了很多。半直驱永磁同步风电系统采用中速齿轮箱,与双馈风电系统的高速齿轮箱相比,降低了故障率及设计成本,提高了发电效率,同时保留了永磁同步发电机系统优良的FFRT能力,是风力发电的主流方向之一[1-3]。
半直驱风电系统通过全功率变换器与电网解耦,具有优越的FFRT能力。目前增强FFRT功能的方法主要集中以下两方面:(1)从改变机侧控制策略的角度出发,在电网故障时通过限制风机桨距角,控制输入至电网的功率实现了风电系统的低电压穿越。这种方法增加了机侧控制策略的难度,且存在响应及时性的问题[4-6];(2)采用卸荷电路或储能系统[7-9]在故障期间稳定直流侧电压,但在故障期间未向电网注入无功电流,不满足国标要求。为提高风电系统FFRT能力,文献[10]采用卸荷电路与改进网侧控制策略相结合的方式实现了风电系统的低电压穿越,但并未对高电压穿越能力进行验证。文献[11-12]提出了基于动态无功电流控制的高电压穿越控制策略,实现了风电系统高穿期间稳定控制。文献[13-14]采用变阻值卸荷电阻可在低电压穿越期间卸放更多能量,实现低电压穿越期间的稳定控制。
本文采用无功优先的改进网侧控制策略结合卸荷电路,可提升半直驱风电系统的FFRT能力。系统整体拓扑结构如图1所示。卸荷电路主要在电网电压故障期间维持直流侧电容功率稳定,网侧变换器在稳态时维持直流侧电压稳定,在故障期间优先向电网注入无功电流。仿真与实测结果表明,采用的控制策略可在多种电网电压故障时,优先向电网注入无功电流支撑电网电压恢复。
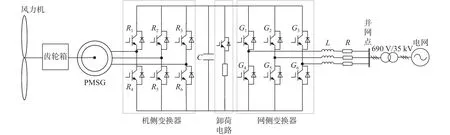
图1 半直驱风电系统拓扑结构Fig.1 Topological structure of semi-direct drive wind power system
1 半直驱风电系统控制策略
1.1 机侧变换器数学模型及控制策略
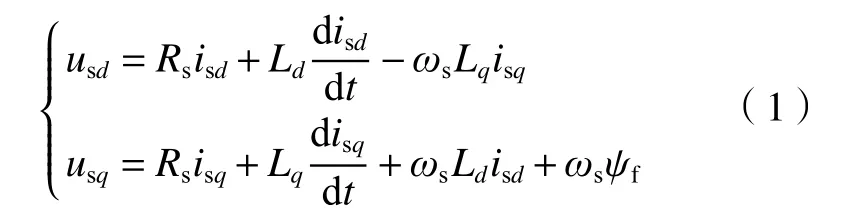
机侧变换器的控制本质上是对发电机组的控制[15-16],实现对风电机组的功率控制。本文的机侧变换器采用转速外环和电流内环的双闭环控制策略[17],转速外环的给定值是控制目标实现的关键。其中转速外环的转速给定由主控给出。PMSG在dq旋转坐标系下的电压方程为:
式中:
Ld、Lq−定子电感d、q轴分量(H);
ψf−转子磁链(Wb);
usd、usq− 定子电压d、q轴分量(V);
isd、isq−定子电流d、q轴分量(A);
ωs−同步角速度(rad/s);
Rs−电网内阻(Ω)。
1.2 网侧变换器数学模型及控制策略
网侧变换器的主要目标为在理想电网条件下维持直流侧电压稳定[18],同时在电网电压暂态故障时优先向电网注入无功电流辅助电网电压恢复。网侧变换器控制多采用直流电压外环和电流内环的双闭环控制方式。为实现功率解耦控制,将电网电压矢量定向于d轴,则d轴电流控制有功功率,q轴电流控制无功功率,得出网侧变换器在dq旋转坐标系下的电压方程为:

式中:
Rg−线路电阻(Ω);
Lg−滤波器电感(H);
ωg−电网同步旋转角速度 (rad/s);
ugd、ugq−网侧变换器电压的d、q轴分量(V);
igd、igq−网侧变换器电流的d、q轴分量(A);
vgd、vgq−电网电压的d、q轴分量(V)。
根据我国最新《风力发电机组 故障电压穿越能力测试规程》(GB/T 36995—2018)要求:在电网电压故障期间,风电系统按要求需向电网优先注入一定的无功电流支撑电网电压恢复[19]。常规网侧双闭环控制无法满足国标要求,对网侧变换器控制策略进行优化,其优化后的控制策略如图2所示。其中,优化后在故障期间无功电流给定分为三个通道:上通道为高电压穿越运行模式,下通道为低电压穿越运行模式,中间通道为单位功率因数运行模式,在该模式下,其无功电流给定iq=0。
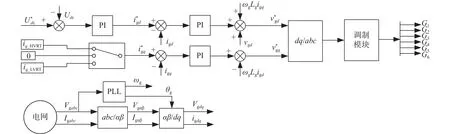
图2 网侧变换器控制策略Fig.2 Control strategy of grid-side converter
其无功电流给定由下式给出:

式中:
ig_HVRT−高电压穿越期间无功电流给定(A);
ig_LVRT−低电压穿越期间无功电流给定(A);
UT−并网点电压标幺值(pu);
In−风电系统额定电流(A)。
2 卸荷电路及电阻选择
低电压穿越运行过程中,由于并网点电压(Point of Common Connection,PCC)跌落,由直流侧传输至电网的功率减小,考虑全功率变换器机网侧解耦特性,机侧功率在故障期间正常工作,势必造成机网侧功率不平衡,多余功率囤积在直流侧电容造成直流侧电压骤升;高电压穿越运行过程中,由于并网点电压升高,电网能量会通过反并联二极管倒灌至直流侧一部分导致直流侧电压骤升;为维持故障穿越期间直流侧电压的稳定,在故障穿越期间投入卸荷电路,消耗直流侧多余的能量,抑制直流侧过电压,进而实现风电系统FFRT运行。
卸荷电阻阻值大小取决于需要消耗的最大功率及直流侧允许的最高电压。当不考虑回路中的非线性元件时,其卸荷电阻取值为:
式中:
Udc_max− 直流侧电压最大值(V);
∆P−需要消耗的最大功率(W);
C−直流电容容值(F)。
根据系统参数及故障电压穿越过程中有功功率变化量,综合可得卸荷电阻阻值R=0.5 Ω。
3 仿真及测试结果分析
为验证改进网侧控制策略提升半直驱风电系统FFRT能力,建立半直驱风电系统仿真模型;并在某项目现场进行实测,其风电系统参数如表1所示。

表1 半直驱风电系统参数Tab.1 Parameters of semi-direct drive wind power system
3.1 并网点电压对称升高 30% 工况
为验证半直驱风电系统的高电压穿越能力,仿真设计风速条件为风电机组的额定风速11 m/s保持不变。其空载、实测及仿真数据如图3和图4所示。其中实测数据为蓝色曲线,仿真数据为红色曲线(其它工况相同)。

图3 3相130%空载电压Fig.3 3-phase 130% no-load voltage

图4 对称高电压穿越运行实测及仿真波形Fig.4 Measured and simulated waveforms of symmetric high voltage ride through
根据新测试规程要求,将测试参数导入仿真模型中,其空载电压如图3所示,在空载期间其空载抬升电压约为1.281 pu,在标准要求±3%内。
电网电压对称骤升至130%工况时,风电机组应优先向电网注入感性无功电流支撑电网电压恢复。为与实测数进行对比分析,模拟在2.0~2.5 s时并网点电压UPCC对称升高至130%的工况,其测试及仿真对比结果如图4所示。在电压骤升工况下,从波形可以看出实测和仿真分别向风电机组优先发出0.430 pu及0.460 pu左右的感性无功电流,高于其理论值 0.300 pu,且其响应时间约为 20 ms,可以更快响应电压变化,有利于UPCC恢复;此时由于无功电流的作用,电压由理论值 1.280 pu降为 1.130 pu左右。无功电流响应时间约为20 ms,不超标准要求的40 ms,无功电流控制良好。根据其有功功率波形可以看出,实测时由于风速实时变化,其功率呈现不规则波动,仿真波形由于风速固定则相对平滑,均在高穿开始及结束时刻有较大暂态波动。在整个高电压穿越运行期间,网侧变换器优先向电网注入无功电流支撑电网电压恢复,实现了半直驱风电系统的高电压穿越运行。
3.2 并网点电压不对称升高 30% 工况
为验证半直驱风电系统不对称高电压穿越能力,在3.1的基础上,设计AC两相对称升高,其空载波形如图5所示。

图5 2相130%空载电压Fig.5 2-phase 130% no-load voltage
根据图6可看出,在不对称高电压穿越期间,风电机组在实测和仿真中分别通过网侧变换器优先向电网注入约0.361 pu和0.369 pu的无功电流支撑电网电压由1.140 pu降低至约1.014 pu,无功电流响应时间约20 ms,比标准要求快一倍左右,无功电流作用效果明显。根据PPCC波形可以看出,在高穿故障结束后约3 s,其功率由于风速减小呈现跌落趋势,风速恢复后,又随之增大;在高穿开始和结束时刻,有功功率有约为0.080 pu的暂态波动。整个不对称高电压船业运行期间,网侧变换器优先向电网注入无功电流支撑电网电压恢复,实现了风电系统的柔性不对称高电压穿越运行。

图6 不对称高电压穿越运行实测及仿真波形Fig.6 Measured and simulated waveforms of asymmetric low voltage ride through
3.3 并网点电压对称跌落至 20% 工况
为验证半直驱风电系统对称低电压穿越能力,仿真风速保持不变,其空载电压波形如图7所示。在故障期间,其故障电压跌落至0.220 pu,标准要求电压跌落档位偏差为(0.200±0.050) pu,在标准要求内。

图7 3相20%空载电压Fig.7 3-phase 20% no-load voltage
电网电压对称跌落80%工况时,应优先向电网注入容性无功功率支撑电压恢复。为对比实测和仿真结果,仿真设计在2.000~2.625 s时发生三相对称20%跌落工况,其测试和仿真结果分析对比如图8所示。从实测和仿真波形图可以看出,在整个低电压穿越期间风电系统向并网点注入约0.955 pu和0.944 pu 左右的无功电流,其响应时间约为 46 ms,响应速度远快于标准要求的75 ms,符合标准要求。在无功电流支撑下,UPCC从其空载的0.220 pu抬升至 0.355 pu。
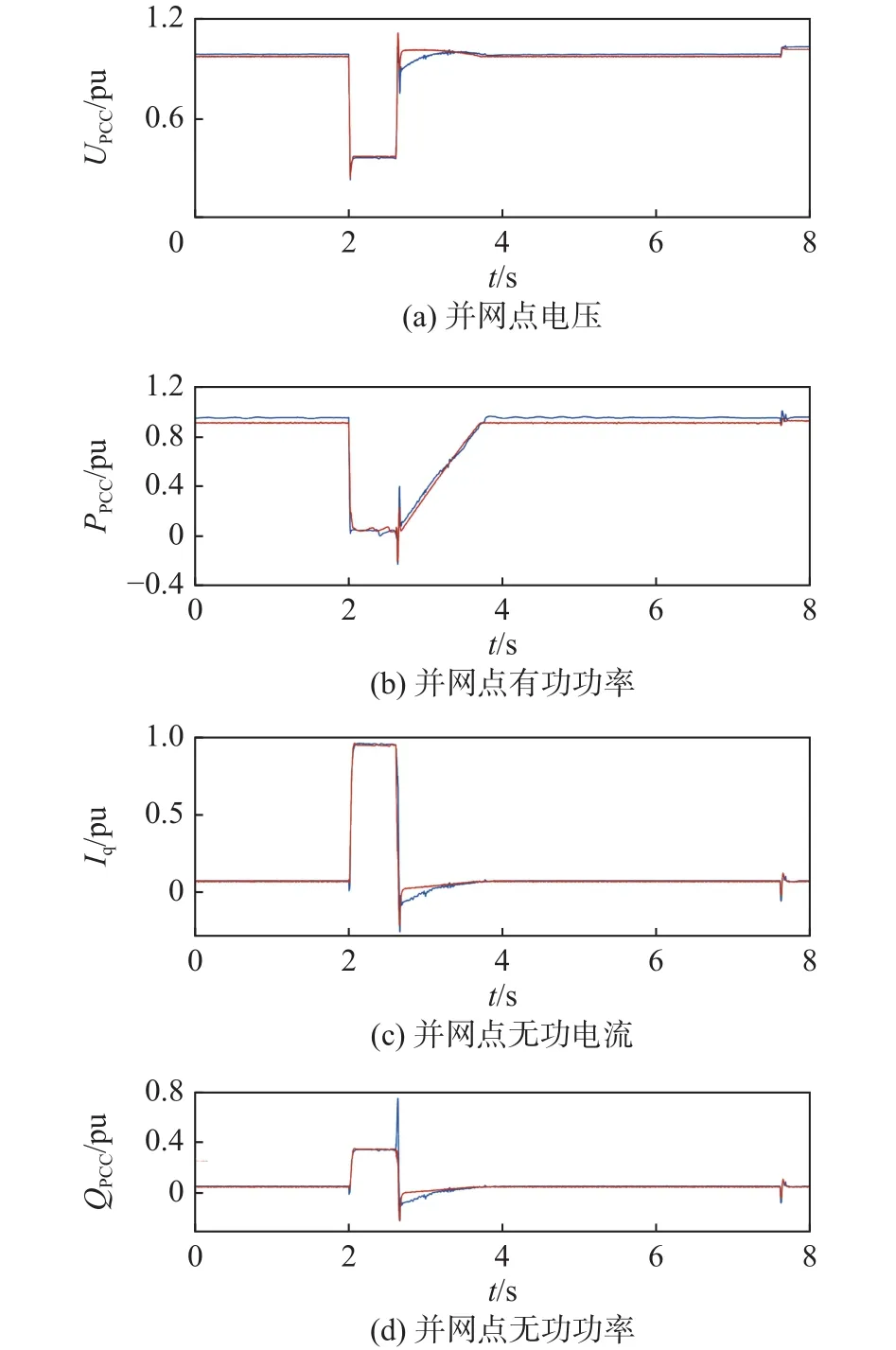
图8 对称低电压穿越运行实测及仿真波形Fig.8 Measured and simulated waveforms of symmetric low voltage ride through
无功电流作用效果明显。整个故障期间,向电网注入约0.050 pu的有功功率,其余 0.950 pu的能量均通过卸荷电阻以热能的形式释放,在故障结束时刻出现较大暂态波动。故障结束后有功功率恢复期间,其恢复速率在实测工况下维持约72.5%Pn/s的速率恢复,仿真期间维持约81.5%Pn/s的速率恢复,远快于标准要求的10%Pn/s,风电系统控制性能良好。仿真和实测无功功率基本维持在0.340 pu左右,仅实测波形在故障结束时刻有0.200 pu左右的暂态波动。在整个对称低电压穿越期间,网侧变换器优先向电网注入无功电流支撑并网点电压,实现了半直驱风电系统对称低电压穿越。
3.4 并网点电压不对称跌落 20% 工况
为验证半直驱风电系统在不对称电压故障下的运行能力,设计并网点发生AC两相短路故障,其故障空载电压如图9所示,可看出在故障期间,线电压跌落最深相跌落至0.164 pu,符合标准。

图9 2相20%空载电压Fig.9 2-Phase 20% no-load voltage
实测和仿真数据的正序分量波形如图10所示。由于不对称期间,标准对无功电流不做要求,为简化控制,在不对称期间网侧变换器不发无功电流支撑电网电压,从图10中的Iq波形可以看出。在故障期间,由于卸荷电路的作用,并网点有功功率PPCC比故障前时刻略低,在故障结束后的恢复阶段,实测和仿真分别以85%Pn/s和91%Pn/s的速率恢复至当前风速对应功率。在故障期间,其正序电压在故障结束时刻有微小的暂态波动;其中无功电流Iq和无功功率QPCC在故障开始和结束时刻有不到0.100 pu幅度的暂态波动,整个实测和仿真期间,网侧变换器控制良好,风机稳定运行,实现了半直驱风电系统的不对称低电压穿越运行。

图10 不对称低电压穿越运行实测及仿真波形Fig.10 Measured and simulated waveforms of asymmetric low voltage ride through
4 结论
本文采用改进网侧变换器控制策略结合卸荷电路的方式可在并网点电压对称跌落/升高、不对称升高故障期间优先向电网注入无功电流,并结合卸荷电路故障期间卸放累积在直流侧电容的能量,有效提升了半直驱风电系统的故障穿越能力,通过现场测试及仿真研究得出以下结论:
1)半直驱风电系统通过无功优先的改进网侧控制策略能在并网点对称故障及不对称升高故障工况下优先且以2倍标准要求速度向电网注入无功电流,辅助电网电压恢复,保证系统故障期间不脱网运行。
2)在不对称低电压故障工况下,风电系统不注入无功电流,简化系统控制策略,提高系统稳定性。
3)现场测试结果表明被测风电机组在无功电流及其响应时间、有功功率恢复速度方面均满足最新的故障电压穿越规程。