基于解剖标记点的手术导航空间配准研究*
2023-01-30胡纪昌吴文琪何嘉嫒范一峰
胡纪昌,邵 彤,董 男,吴文琪,何嘉嫒,范一峰
(杭州医学院医学影像学院,浙江 杭州 310053)
0 引言
手术导航系统(Image Guided Surgery,IGS)[1]以影像学数据为基础建立图像空间,在手术前通过寻找图像空间和病人空间的坐标转化关系,达到在术中实时跟踪手术器械在病人空间位置的目的。手术导航系统帮助医生减少手术对病人造成的创伤,降低了手术风险,是微创手术的重要组成部分。空间配准[2]是手术导航的最为关键技术,空间配准的准确性在很大程度上决定了导航系统的定位精度。
目前,应用于手术导航系统中的空间配准算法主要有点匹配空间配准[3]和面匹配空间配准[4]。点匹配空间配准是应用最为广泛的一种空间配准方法,手术前,医生在病人头皮表面粘贴人工标记物[5],将其作为配准的标记点。这种方法需要专门为导航进行一次影像扫描[6],增加了病人的辐射剂量和手术成本。面匹配空间配准通过扫描仪获取病人面部表面点云进行空间配准,与传统的点匹配空间配准相比,其优点是不需要粘贴人工标记物和进行专门的影像扫描。但是面匹配在临床中的应用并不广泛,主要是因为它的配准精度不均匀、脑后部靶点配准误差较高[7]。
本文提出一种基于解剖标记点[8]的空间配准法,使用病人头部固有的解剖标记点进行空间配准,不需要粘贴人工标记物和进行专门的影像扫描,而且配准精度较为均匀。
1 配准过程
本文采用奇异值分解法(SVD)[9]对两个空间进行配准。先在图像空间选取一个点集{Pi},然后在病人空间选取一个对应的点集{Qi},最后对两个点集的对应关系进行转化。配准的目标是寻找{Pi}和{Qi}之间的一种转换关系:
Qi=RPi+T
其中,R旋转3×3旋转矩阵,T为3×1平移矩阵。
⑴分别求点集P和Q的质心

⑵求各标记点相对于质心的位移向量

⑶求H矩阵
⑷对H矩阵进行SVD分解,得到:
H=U∑VT
⑸根据I=VTRU,求旋转矩阵R
R=VUT
⑹求平移矩阵T
T=Q-RP
2 实验结果
本实验使用台式计算机,3D Slicer 导航模块[10],NDI公司的Polaris定位仪及其配套的跟踪器械构成一套手术导航系统,如图1所示。
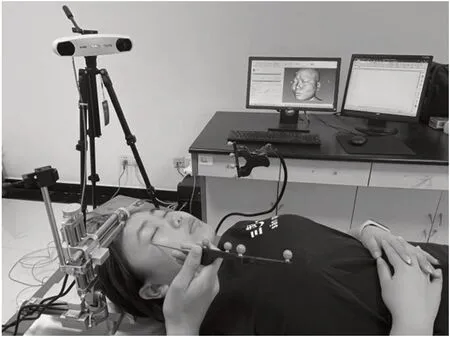
图1 手术导航系统的构成
使用鼻根、鼻尖、左眼外眦、右眼外眦、左外耳廓切迹、右外耳廓切迹作为解剖标记点进行空间配准。用探针在头部表面和图像空间分别选取以上解剖标记点进行空间配准,标记点配准误差(Fiducial Registration Error,FRE)为1.07。选取如图2,图3所示的5个靶点,其配准误差如表1 所示。实验结果表明,所有靶点的TRE均小于2.5 mm,能够满足临床需求。

图2 正脸靶点分布
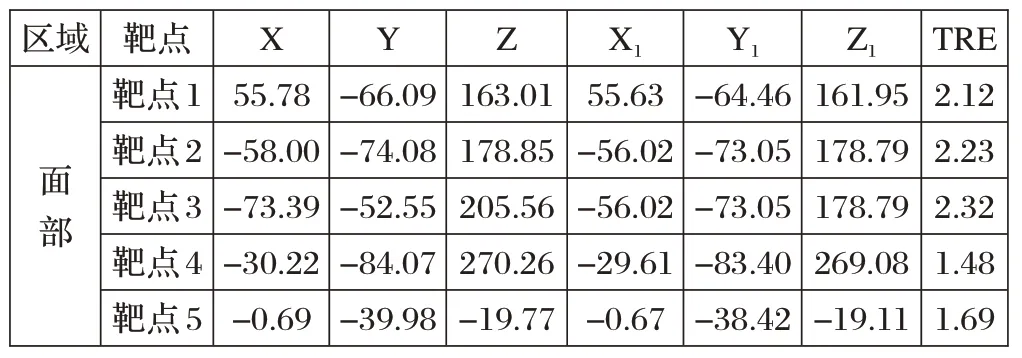
表1 靶点配准误差
3 结论与展望
本文提出一种基于解剖标记点的空间配准方法,该方法具有靶点配准精度高,鲁棒性强的特点,能够满足临床需求。由于是针对志愿者的实验,所以只用到了面部的解剖标记点,没有利用到脑中后部的解剖标记点。下一步将充分研究脑部各种不同的解剖标记点的组合对靶点精度的影响,以满足不同组合对不同手术姿势的需要。
