基于闭环控制的空间自平衡担架设计
2023-01-30谭隆君
谭隆君,尹 念
(1.长沙理工大学城南学院,湖南 长沙 410015;2.长沙理工大学汽车与机械工程学院,湖南 长沙 410114)
0 引言
救援环境中,路面通常因遭到破坏导致凹凸不平,使得伤员的转运速度减慢,也增大了医疗人员的劳动强度。搬运过程中担架的过度倾斜不仅会使伤员感到不适,还可能对骨折、内伤和内出血等伤病员造成二次伤害,危及其生命安全。为防止伤员在运输时倾斜而受到二次伤害,提升运输效率,靳飞等[1]设计出一种能够保持平稳性的自平衡担架床,能够根据地形变化调整担架的角度保持平衡。为解决多向倾斜问题,张欣等[2]设计出一种可多向自平衡的担架床,在担架床中引入控制思想,提升了伤员的运输质量。目前投入使用的自平衡担架床虽然能有效实现倾斜路面的自平衡,但大多结构复杂、重量重,不便于携带且运输效率较低。基于此,本文设计出一种集自平衡与可拆卸于一体的多功能担架床。
1 机构自平衡原理
自平衡机构包括抬杆、支撑杆和担架板,其中,支撑杆一端与抬杆活动连接,另一端与担架板通过旋转副相连,如图1所示。当救援人员抬着担架行走在有一定倾斜角度的路面上时,控制器控制支撑杆伸缩,带动旋转副转动进行角度调节,实现自平衡,整个过程不需要人工介入。

图1 机构自平衡原理图
2 整体结构设计
本设计可拆卸自平衡担架由自平衡担架、自平衡控制系统、360°旋转把手和可拆卸结构4部分组成。
为保证平衡担架在复杂的环境中保持平衡,需要对其x、y和z轴的转动和z轴的移动进行实时调整。根据上节所述的机构自平衡原理设计出如图2所示的自平衡控制系统,系统由STM32单片机、电推杆、控制器、担架主体和动态倾角传感器组成。工作原理是测量范围为0°~360°、测量精度为0.1°的动态倾角传感器时刻检测担架主体的倾斜角度,并实时与控制器内预先设置的角度对比,若数据发生偏差,控制器则发出指令驱动4个电推杆(见图3)伸缩,实现担架主体的高度调整。
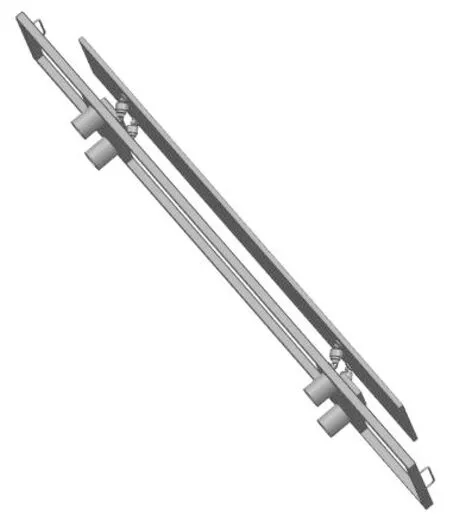
图2 担架自平衡结构图

图3 带万向球头的电动推杆
担架处于倾斜状态时会导致救援人员的手腕感到不适,采用360°旋转把手可不受任何方向的制约,救援人员的手腕不必随担架倾斜,始终处于舒适状态。
可拆卸结构部分,担架外架上设有间隔的螺纹孔,可用于安装担架窗和担架顶,安装后可在运输时防雨和防高空坠物对伤员造成二次伤害;担架主体四角有带插销的4个空心柱,当伤员转移到路况好的环境时可用于安装电动滚轮加快运输速率,减少救援人员体力消耗;在划艇上还可起到固定桩的作用,便于救援时通过深水区和洪水受灾区。
3 控制效果仿真分析
经典PID控制器的原理是用预设输入与实际信号的误差以及其微分、积分的线性组合来产生控制信号。但其常常存在调节时间与超调量之间的矛盾,即无法在保证快速的条件下实现无超调。而将这3个状态参数进行非线性组合采用PID控制有助于提升控制效果[3]。
常见线性PID控制器传递函数的一般表达式为:
(1)
本文采用了一种基于电容电极之间带电粒子的作用原理所构造的非线性函数[4]对PID控制率进行修正。其控制规律的表达形式为:
(2)
式中:
(3)
(4)
式中:参数m>0,用来调整函数曲率;参数U0用来调整函数的幅值;|e| 以1/s(s+2)(s+3)为模型,对模型进行线性和非线性PID控制对比,在预定参数下,非线性PID控制器的系统框图如图4所示。 图4 非线性PID系统框图 为验证控制器的性能,以增益曲线与横轴所围面积相等为依据分别进行参数设计[5]。 线性PID控制器的参数为: kP=5,ki=0,kd=4.1 非线性PID控制器的参数为: 2种控制器的阶跃响应如图5所示,差距在5%以内,且最终都能回到稳定状态,系统稳态误差都接近于0。但在上述预定参数下对2种控制器进行延时环节测试时,非线性PID控制器的最大延时为线性PID 控制器的192%。研究结果表明,这种非线性PID控制器能够在保持系统控制刚度的条件下,较好地提升系统的最大延时承受能力,获得更大的稳定裕度,更好地平衡了系统动态响应性能和稳定性之间的矛盾。 图5 阶跃响应时间对比 为防止伤员在救援运输过程中受到二次伤害,保证伤员在运输中的平稳性,本文设计出一种可用于复杂地面环境救助伤员的可拆卸式自平衡担架。其具有以下优点。 1)采用4个电动推杆与球形万向节的联合动作实现担架在多方向的角度调整,以应对担架的任何倾斜状况。 2)采用一种新的非线性PID控制算法,有效提升了系统的控制能力,增大了系统的稳定裕度。 3)根据实际情况,担架可拓展安装各种附件结构,增加附加功能,实现担架的多功能化。

4 结论
