无人机LiDAR在道路勘测设计中的应用
2023-01-30贾东杰
贾东杰
(广州地铁集团有限公司,广东 广州 510200)
1 引 言
在传统地形勘测过程中,主要采用RTK的方法沿路线中线按要求定测道路带状地形图、纵横断面等成果用于道路前期的设计规划。但面临着测量周期较长,外业工作量大,尤其在一些植被茂密的山地区域,完成勘测任务需要耗费大量人力物力[1]。无人机LiDAR测量作为一种快速发展的获取目标表面三维空间数据的技术,具有效率高、对植被的穿透性较强等特点,为道路勘测设计提供了新思路。祝燕[2]将机载LiDAR应用于铁路断面测绘中,实现低植被覆盖区断面图生产,在高植被覆盖区效果存在局限性;张衡[3]等将大型LiDAR应用于山区高速公路的勘测设计中,生成测区地形图和道路断面图。李勇[4]依托无人机LiDAR技术对道路进行分段测量,验证了无人机LiDAR技术在公路断面测量中应用的可行性。本文针对小型无人机机载LiDAR技术,在高植被覆盖区域的山区,通过点云滤波算法,实现地面点云数据提取及道路纵横断面生成。
2 技术设计
2.1 项目概况
实验区域总体地形为丘陵地带,测区内地形复杂,西北部测区多以植被茂密的山地为主,东南部区域地势较为平坦,分布有较多的农田和水系。本次勘测线路总长度约为 1.5 km,宽度约为 150 m的条带状区域,为保证点云具有足够的密度和航线重叠度,设计航线为2个架次。项目实施流程如图1所示。

图1 项目实施流程图
2.2 数据采集
本项目数据采用一架8旋翼无人机作为机载平台,搭载RIEGL VUX-1UAV激光扫描仪,无人机上集成了GNSS数据采集单元和惯性导航单元(图2)。在进行激光点云数据采集前,分别设置激光扫描仪、GNSS接收机和地面接收机的采样频率一致,按照规划航信进行数据采集。表1为机载LiDAR的相关参数设置。

图2 无人机LiDAR平台

表1 机载LiDAR参数设置
2.3 激光点云数据生成
利用POSPac软件完成对原始数据的解算,POSPac是Applanix公司研制的一套先进的、智能化的定位定姿数据处理软件,其处理流程为:将地面基准GNSS静态数据导入,并输入基站的精确坐标;将无人机上惯导数据和移动站GNSS数据导入,并输入经过标定后的激光扫描仪与POS模块的相对位置姿态数据,参数设置完成后进行无人机位姿信息解算,生成无人机最佳平滑轨迹(图3),将POS解算后的轨迹数据和激光数据进行融合,即可生成测区点云文件[5]。完成点云融合。
图3 无人机轨迹生成
3 无人机LiDAR数据处理
3.1 点云坐标转换
由POSPac解算的机载LiDAR点云数据在坐标系上采用WGS84坐标。而本项目设计的道路中线所采用的是CGCS2000坐标系。为保证后续生成地形图和道路纵横断面图,考虑到测区范围较小,本文采用四参数[6]法将点云数据的平面坐标由WGS84坐标系转换为项目所使用的CGCS2000坐标系,采用高程拟合方法对高程数据进行转换。
平面转换时,分别在测区周围选取同时具有WGS84坐标和CGCS2000坐标的5对同名点,计算出转换参数,将机载LiDAR点云数据转换到CGCS2000坐标系,转换模型如下所示:

其中:m为尺度变化参数,α为旋转参数,dx,dy为2个平移参数。
高程拟合是将GPS测得的大地高转换为本项目上的正常高,常采用的方法有基于EGM2008模型[7]和二次曲面函数[8]拟合。本项目测区范围较小,采用二次曲面拟合方式,其函数表达式为:ξres=a0+a1x+a2y+a3xy+a4x2+a5y2式中,ξres表示高程异常;x、y表示重心化坐标;a0、a1…a5表示拟合系数。因此在进行高程拟合时,联测的已知高程数不少于6个。具体做法如下:首先联测测区范围内不少于6个已知高程点在WGS84坐标系下与CGCS2000坐标系下的高程,使用最小二乘法求解拟合系数,求出在点云数据中的高程异常值,最终得到机载LiDAR点云的高程数据。
3.2 点云滤波
测区原始点云数据中包括居民地、电力线、树木、水系等要素和噪声点,在进行道路断面提取之前,需要先将非地面点去除,得到只包含地面点的点云数据。本文采用渐进三角网滤波算法[9]对原始点云数据进行滤波处理,从中提取得到地面点云数据。
渐进三角网滤波算法原理是先将测区点云数据进行格网化分块处理,对于每个分块,选取其中最低点作为种子点,利用种子点与周围临近点相连构建初始三角网,初始三角网能够粗略表达整个区域的地形[10]。然后依次向周围搜索,不断添加候选点到三角网中最近三角形的距离和角度,判断是否满足设置的阈值要求,将满足阈值要求的候选点加入三角网形中,使三角网格更加贴近实际地形情况,迭代过程会一直进行,直到没有合适的点加入三角网格为止[11],如图5所示。本次采用渐进三角网算法的参数设置为:最大建筑物尺寸 50 m,最大地形坡度80°,迭代角度8°,迭代距离 1.5 m,迭代终止条件为当三角网中三角形边长小于 1 m时,停止生长。
按照上述参数设置对图4所示的原始点云进行处理,得到地面点云如图6所示,同时截取剖面图,如图7所示,更加直观地对比。

图4 原始测区点云
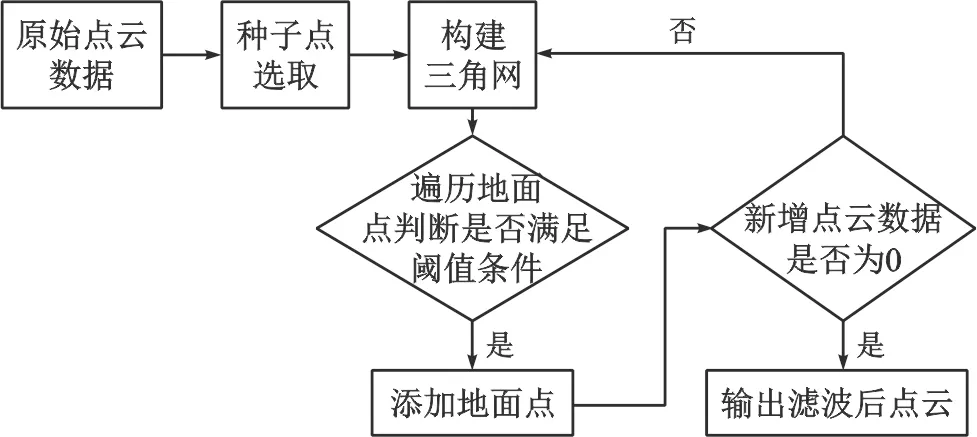
图5 渐进三角网滤波流程图

图6 滤波后整体图

图7 点云滤波前后对比图
为检验提取地面点云精度,利用RTK沿设计线路沿线实地采集地面点坐标。以其中某一段为例,RTK沿纵断面线共采集146个点,为每一个RTK点都从提取的地面点云中选取距离相近的点与其做高程对比,高程对比结果如表2所示:

表2 提取地面点高程与实测高程对比表
从对比结果可以看出,49%提取的地面激光点云高程与RTK所测的地面点高程差值小于 0.1 m,88%的地面激光点云与RTK所测地面点高程差值小于 0.3 m,结果表明:本文采用的渐进三角网加密算法从机载LiDAR点云中提取地面点的结果能够满足公路勘测的要求。
4 道路纵横断面提取
从生成的地面点云中提取规划道路的纵横断面,其主要流程如下:
将设计道路的中线文件从起点开始每间隔 50 m生成一条道路横断面线,如图8所示,将生成的设计道路纵横断面DXF图导入到提取的地面点云数据中,效果如图9所示。
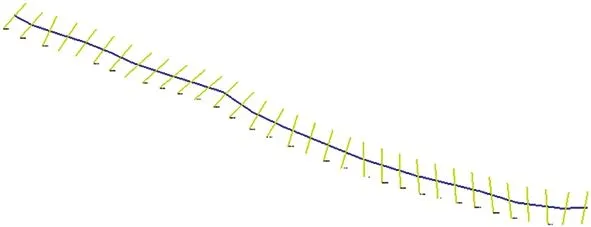
图8 设计道路纵横断面
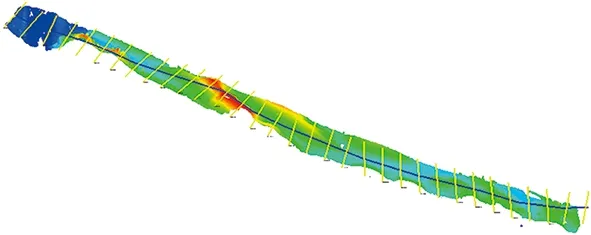
图9 断面文件导入地面点云
根据设计的道路纵横断面DXF图中关键点的平面坐标在地面点云中进行最邻近点搜索[12],将满足条件的地面点云按顺序连接成线,即得到设计道路的地面纵横断面图,如图10~图13所示。

图10 道路纵断面图
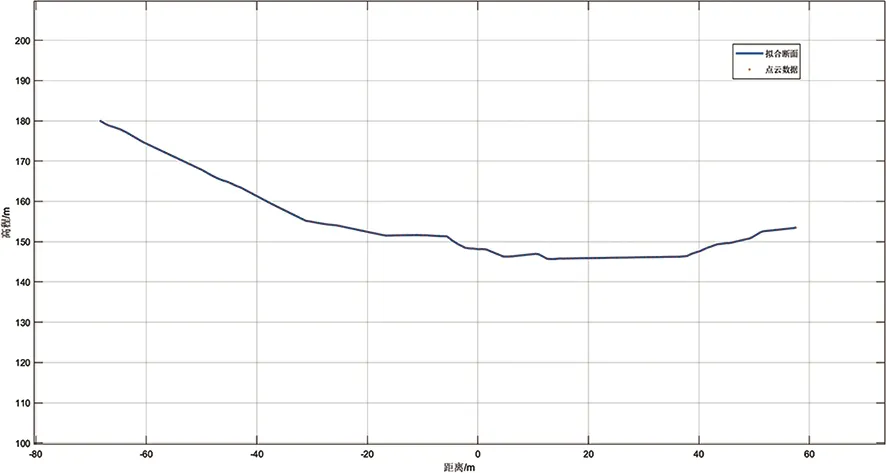
图11 道路横断面图(100 m)

图12 道路横断面图(500 m)

图13 道路横断面图(1 000 m)
5 总 结
无人机LiDAR测量技术是一种高效的获取地面位置数据的方法,通过进一步处理可以获取测区的数字高程模型、数字正射影像和纵横断面图等测绘产品。本文结合道路勘测项目,利用无人机LiDAR获取了测区范围内全部的点云数据,通过对点云进行滤波处理,提取出地面点数据和纵横断面图。通过本文实验表明,采用无人机LiDAR技术加快公路勘测项目的进度,缩短勘测周期。
