改进自适应禁忌退火粒子群算法的电力系统环境经济调度
2023-01-27熊国江何其多付子怡
史 磊,熊国江,潘 政,刘 宇,何其多,付子怡
(贵州大学电气工程学院,贵阳 550025)
0 引言
在电力行业中,火电厂由于化石燃料燃烧产生大量污染气体,如SO2、NOx以及CO2气体,对环境造成严重污染。因此,有必要将传统单纯考虑发电成本的调度方式转变为兼顾环境因素影响的环境经济调度(Environmental Economic Dispatch,EED)方式。在EED问题中,同时以发电成本最小和污染气体排放量最低为目标。通过EED 旨在使发电成本和污染气体排放两者利益趋于平衡,具有现实意义。
EED优化问题是一个非凸、非线性、存在多个约束条件的多目标优化问题。目前对EED 问题的目标处理方式主要有两种,其一是将两个目标同时处理,周汝南[1]提出一种交互式模糊偏好多目标进化算法,或采用帕累托前沿[2],将Pareto最优解作为求解目标,但对于高维多目标同时处理时,对求解算法的要求较高、求解质量较差,且运行周期长;其二为单目标处理方法,文献[3]中将其中一个目标作为约束条件处理,但很难获取合理的解,偏重性太强。文献[4]中运用价格罚因子,通过价格罚系数(Price Penalty Factor,PPF)将气体排放量转化为费用嵌入经济调度,这种方法在一定程度上牺牲了目标之间的协调关系,对求解算法要求相对较低、求解质量高、运行周期短。
传统优化算法在求解EED问题时,存在求解速度慢、精度差等缺点,智能优化算法开始受到更多研究学者的青睐。智能优化算法在求解EED 问题中具有较大的优越性。目前发展迅速的智能优化算法有粒子群算法、遗传算法、退火算法、免疫算法、萤火虫算法、差分进化算法以及禁忌搜索算法等。武慧虹等[5]提出一种基于精英克隆和突变机制的改进差分进化算法,提高算法的全局搜索能力;于德鳌等[6]提出一种变步长的萤火虫算法,提高求解的精度;Al-Amyal 等[7]提出一种改进蚁群算法,通过减少每层节点数量而不影响问题探索来提高算法的搜索能力;Dasgupta 等[8]利用价格惩罚因子构建一个单目标函数,利用基于混沌序列的混合回溯搜索算法和粒子群优化算法求取目标函数最优值。
粒子群算法作为一种典型的智能优化算法,具有易于实现、精度高、收敛速度快等优点。传统粒子群算法在算法早期容易陷入局部极值,且其惯性权重和学习因子等参数对算法的求解结果有很大影响。针对这一问题,陆松建等[9]设计出一种带逃逸策略的简化粒子群算法,引入一种逃逸机制来跳出局部最优解。该方法解决了局部极值问题,但求解结果欠佳;闫群民等[10]提出一种基于双曲正切函数模型的惯性系数决策,进行非线性的自适应变换,使得求解水平有所提高。吴永红等[11]提出一种对惯性权重和学习因子进行调整的策略,试图建立学习因子与权重系数的变化函数,提高算法的优化精度。除参数自适应的改进外,还可通过改进更新公式来提高粒子群算法的性能。Lin等[12]增加粒子个体朝向全局最优的引领搜索项,使粒子群获得更多扰动,避开局部极值;还有引入黑洞理论的黑洞粒子群[13]等。多种智能优化算法融合也备受学者青睐,郭明杰等[14]将模拟退火思想和粒子群进行融合,提高离散优化问题的处理能力,同时避免陷入局部最优;刘刚等[15]将微分进化算法和粒子群相融合,既保持前者的快速收敛性,同时兼具后者搜索多样性;田壁源等[16]则根据粒子当前状态对权重系数和学习因子进行修正,进一步改善早熟的缺陷,增强其局部搜索能力。
基于上述研究现状,采用修改平均价格罚因子(Modified Average Price Penalty Factor,MAPPF)[17]的折算方法将EED问题转化为单目标优化问题,降低问题的求解复杂度,提出一种改进自适应禁忌退火粒子群算法(Improved Adaptive Tabu Annealing Particle Swarm Optimization,IATAPSO)来提高EED 问题的求解效率,避免早熟现象的发生。针对惯性系数和学习因子,分别设计基于反正切函数和余弦函数的参数自适应控制策略,保证算法在前期具有较强的全局搜索能力,中期局部搜索能力逐步提升,后期拥有局部收敛速度。引入禁忌思想的退火扰动机制,加强粒子摆脱局部极值的能力,有效避免粒子种群“早熟”现象的发生。通过15 机系统为算例[17],进行仿真分析。
1 EED问题的数学模型
EED问题需要在满足等式和不等式约束条件下,最小化发电机组发电成本和污染气体排放量。
1.1 发电成本
总发电成本的目标函数[18]为

式中:N为火电机组数;Pi为火电机组i的有功出力;ai、bi和ci分别为火电机组i运行费用系数。
1.2 污染气体排放量
污染气体总排放量的目标函数[18]为

式中,αi、βi和γi为火电机组i的污染排放系数。
1.3 约束条件
(1)功率平衡约束。发电机组总有功出力等于系统总负荷与系统总网损之和,即

式中:PD为系统总负荷;Ploss为总网损。对于Ploss,采用B系数法求解

式中,Bij、B0和B00为系统网损系数。
(2)发电机出力约束。综合考虑机组有功出力最大、最小范围和爬坡速度约束后的机组出力限值:

式中:为机组i前一时段的出力;DRi、URi分别为机组i爬坡速率的下限值和上限值;Pi,max、Pi,min分别为机组i的最大、最小出力,为机组i在该调度时段的最大、最小出力。
(3)旋转备用约束

式中,PR为调度时段总旋转备用容量。
2 改进自适应禁忌退火粒子群算法
受鸟类群体行为启发,提出粒子群算法(Particle Swarm Optimization,PSO)。PSO 是一种随机搜索算法,具有较快的收敛速度和全局搜索能力。假设在D维的搜索空间中,N个粒子形成一个种群,每个粒子为一个D维向量xi=[xi1,xi2,…,xiD],i=1,2,…,N;其速度向量为:vi=[vi1,vi2,…,viD];第i个粒子个体最优位置pbi=[pi1,pi2,…,piD];粒子群最优位置gb =[g1,g2,…,gD];每个粒子向量都是优化问题的一个潜在解,在PSO中粒子更新

2.1 改进参数自适应策略
在标准粒子群算法中,参数ω、c1和c2是控制粒子运动方向的重要参数,在大多的算法中,其取值多靠经验,但给定的取值难以满足不同迭代时期的要求。
2.1.1 惯性系数反正切函数控制策略
惯性系数ω表征继承上一代速度的程度,直接影响算法搜索能力。当ω 较大时,受上代粒子速度影响大,飞行速度快,全局搜索能力强,但难以做到局部收敛;ω较小时,受前代粒子影响小,对局部进行细致搜索,很容易陷入局部极值,求解效果差。针对这种特点,提出一种基于反正切函数的ω系数的控制策略:
式中:ωmin、ωmax分别为给定惯性系数的最小、最大值;t、M分别为当前代数和给定最大代数;n为衰减系数。n越大,其中期衰减速度越快,反之则相反。
在算法前期使ω 保持较大值,增大全局搜索能力,避免陷入局部极值;在中期,保持一定速度逐渐减小ω的取值,逐步增强其局部搜索能力;在后期,ω 的取值较小,较小的取值可以对极值附近区域进行精细搜索,使粒子向着全局最优位置收敛。通过自适应策略可实现全局搜索能力和局部搜索能力之间的控制。
2.1.2 学习因子余弦函数控制策略
对于学习因子c1、c2而言,若c1较大,粒子更多向着个体最优位置移动,粒子群全局搜索能力有所提高,但难以找到最优值且难以收敛;若c2较大,其收敛速度快,容易陷入局部极值。因此采用余弦函数的非线性学习因子策略:

在算法初期,c1=2.5、c2=0.8,随着迭代数t的增大,c1逐渐减小为0.1,相反c2逐步增加到3.2。这样设置可在初期保证全局搜索能力,且变化速度较缓,对全局进行较全面的搜索;在中、后期c1迅速下降,c2迅速上升,使得局部搜索能力迅速提高,收敛速度加快。
2.2 改进禁忌退火扰动策略
在粒子群进化过程中,通过参数的自适应使算法具备一定全局搜索能力,但其全局搜索能力有限,在粒子迭代过程中,难以避免出现大量粒子聚集的现象,使得粒子多样性变得匮乏,在迭代前、中期出现大量粒子聚集的“早熟”现象,容易陷入局部,仅通过式(7)进行位置的更新,难以跳出局部极值,引入禁忌激励的退火选择机制,来选择全局最优位置的替代解xbr来取代gb,利用其突跳的概率,一定程度上避免“早熟”情况的发生。
2.2.1 退火温度适应值
模拟退火算法是一种全局性优化算法,借鉴物理退火过程,利用Metropolis 准则并适时控制温度的下降来求解全局性优化问题[14]。结合Metropolis 准则,定义其第i个粒子温度适应值为Tfit(i),求取过程如下:
式中:T(i)为第i个粒子对应的温度适应值;pbest(i)为第i个粒子的个体最优值,其对应粒子个体最优位置为pbi;gbest为全局最优值,其对应的粒子全局最优位置为gb;Tc为当前代数对应退火温度,其初始的取值与更新的方式为:

式中,K为退火的降温系数,一般取值为[0,1]之间接近1 的值,取值为0.9。
2.2.2 禁忌激励度
结合禁忌搜索思想,算法在迭代前、中期应避免过多重复于局部搜索,造成粒子的浪费,记录前一代到达过的全局最优位置,在下一代搜索中应减少对该位置的搜索,使前期粒子更新更多作用在全局范围搜索,提高全局搜索能力。
根据粒子间欧式距离对远离全局最优位置的粒子给予“激励”(Mfit):

为避免迭代后期产生过大的扰动,保证算法的收敛能力,在此仅考虑D(i)数值降序排列的前3 个粒子激励度,其他粒子则不予考虑,视为不存在激励度。
2.2.3 轮盘赌算法选择扰动粒子
将Tfit、Mfit进行线性组合,归一化处理得到总体适应度值

通过轮盘赌选择法,根据其粒子总体适应值,在粒子pbt的集合中进行选择,得到的粒子为扰动粒子xbr。利用xbr代替式(7)中gbt粒子来参与粒子更新,

xbr选择为gbt的概率如图1 所示。
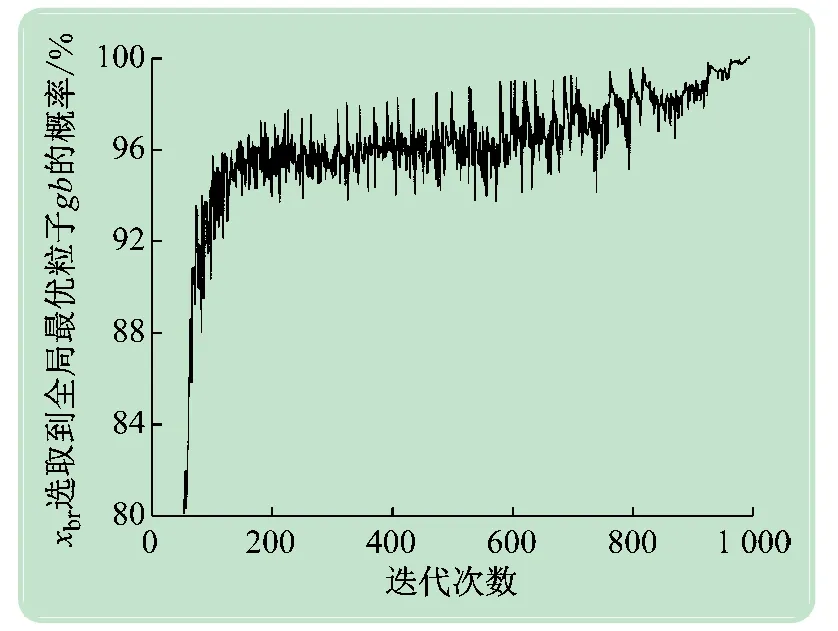
图1 禁忌激励后xbr选择到gbt 的概率
由图1 可见,在迭代初期禁忌激励度的影响较大,扰动粒子xbr有较大概率选择到远离前代最优位置gbt的激励粒子对应的个体最优解pbit,来替代gbt去引导粒子进行全局性搜索,一定程度上避免“早熟”现象;而在迭代中、后期,随着温度适应值差距的扩大与激励度系数(M-t/M)的逐渐衰减,禁忌激励效果减弱,xbr选到gbt粒子的概率逐渐增大,最后逼近于1,从而保证算法的收敛能力。
3 IATAPSO算法求解EED问题步骤
EED属于多目标问题,两目标之间量度不一致,难以同时求得两目标的最优解。因此需要寻求二者的利益平衡点,建立EED数学模型:

式中:f(P)为环境经济优化调度的机组综合总费用;hm为修改平均价格罚因子[17]。
为满足约束条件,需对条件中的等式约束和不等式约束进行处理。对违反不等式约束的值进行边界截断处理,即越界则取临近边界值,对违反等式约束的值采用罚函数法处理。
IATAPSO算法求解EED步骤如下:
步骤1参数初始化,设置初始粒子群参数及退火参数。
步骤2随机生成初始粒子位置,并计算适应度值,选出pb和gb。
步骤3根据式(11)~(13)计算温度适应值Tfit,根据式(14)、(15)计算求得禁忌激励度Mfit。
步骤4根据式(16)求解总体适应值,结合轮盘赌选择法选出扰动粒子xbr。
步骤5根据式(8)~(10)分别对参数ω、c1、c2进行更新。
步骤6根据式(17)对粒子位置进行更新,并进行约束处理。
步骤7计算更新粒子适应度值,更新个体最优pb和全局最优gb。
步骤8根据式(13)对当前温度Tc进行降温;判断当前迭代次数是否大于最大迭代次数,若大于则执行步骤9;否则,重复步骤3~7。
步骤9输出搜索到的全局最优位置gb 以及全局最优值gbest,算法结束。
4 算例分析
以15 机系统为算例,分别采用PSO、ASAPSO[10]、SAPSO[14]、ADCPSO[19]和IATAPSO等算法进行仿真求解,种群粒子数为50,迭代1 000 代,在Matlab 试验平台上独立运行20 次,记录其最优目标函数值,平均目标函数值以及输出结果的标准差。此外与文献[17]中EPA算法与HEPA 算法的实验结果进行比较。结果见表1、2。

表1 各算法最优值及各机组出力
对比表1 中数据,IATAPSO最优解与其他的算法最优解相比,机组发电总成本略高于其他算法,而污染气体总排放量最低,证明模型充分考虑环境调度的影响因素,也说明发电成本与污染排放二者相互矛盾。
对比表2 中数据,IATAPSO 最优值最小,较之标准PSO节约费用2 426.57 $/h,较之ASAPSO[10]节约费用991.34 $/h,与SAPSO 相比节约费用1 080.04$/h,较之ADCPSO[19]节约费用2 144.78 $/h,较之EPA 与HEPA,分别节约费用为8 737.09 $/h 与7 377.09 $/h。这说明,IATAPSO较之其他算法具有更强的寻优能力与跳出局部极值的能力,将各算法求解结果的20 次平均值进行比较,IATAPSO 具有出色的表现,说明IATAPSO 具有稳定的运算结果,可以有效的避免“早熟”的现象发生。
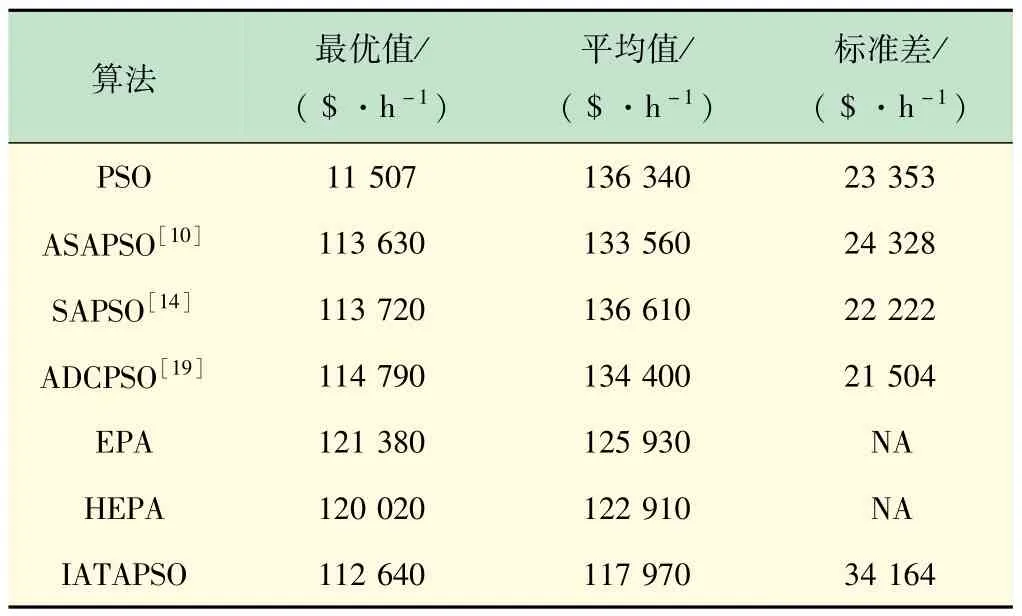
表2 各算法运行20 代的最优值、平均值、标准差
此外,通过标准差分析可知,IATAPSO 标准差远小于其他各类算法,可见其鲁棒性强,求解质量高。
各算法的收敛曲线如图2 所示。
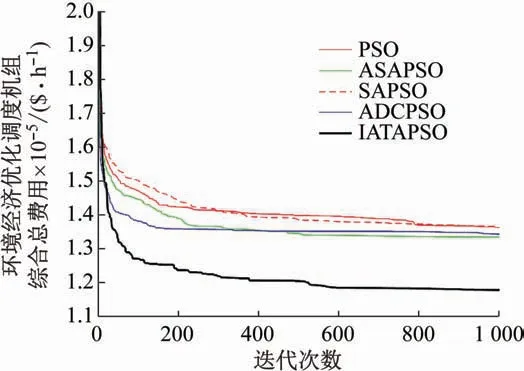
图2 各算法收敛曲线对比
可见,IATAPSO 可以保持较快的收敛速度,同时具有出色的跳出局部极值的能力,在50 代以内便已远超其他算法,避免了“早熟”现象的发生。
上述仿真结果表明,IATAPSO在跳出局部极值能力,收敛速度以及鲁棒性等方面均有出色的表现,较之其他对比算法更有竞争力。
5 结语
本文提出一种基于改进自适应禁忌退火粒子群算法的EED求解方法,采用修改平均价格罚因子将EED转化为单目标优化问题,降低问题求解难度。为提高粒子群算法的求解性能,设计了相互协调的参数自适应策略,同时引入禁忌搜索和模拟退火思想,增强了粒子群算法的全局搜索能力,降低了前、中期陷入局部极值的概率,提高算法的收敛速度。15 机系统仿真结果表明,与其他算法相比,IATAPSO 具有更好的求解精度和求解稳定性,且收敛速度更快。