基于四元阵的超短基线便携式定位设备定向算法
2023-01-27郭晓明
郭晓明,田 甜
(中国电子科技集团公司 第三研究所,北京,100015)
0 引言
各种水下搜救打捞、警用潜水员训练和实操以及潜水爱好者培训等应用场景均涉及潜水员水下协同作业。由于水下能见度差,视野范围小,方位感差,且电磁波衰减严重,传统的陆上定位设备在水下无法使用,因此亟需一种可以解决潜水员水下协同作业时获知相互位置信息的便携式定位设备。
鉴于声波在水下的良好传播特性,目前水下定位以水声定位技术为主要手段,包括长基线定位技术、短基线定位技术和超短基线定位技术[1]。其中长基线和短基线定位系统都需要安装固定的基阵,且基阵尺寸较大。而超短基线定位系统基阵尺度较小,安装方便,可用于舰船和无人水下航行器等的水下定位。
超短基线定位技术发展比较成熟,国内外已经有大量的关于其阵型设计、安装校准、发射信号形式和定位精度提升等方面的研究以及相关成熟产品[2-9]。例如,针对潜水员水下定位主要包括使用岸基主被动声呐对未知入侵潜水员进行定位跟踪的技术及产品研究[10-12],以及针对潜水员水下协同作业时相互位置信息获取的应用研究[13-14],而用于潜水员水下协同作业相互位置信息获取的技术研究基本处于未公开状态。
文中针对潜水员水下协同作业相互位置信息获取应用需求,设计了适用于潜水员水下作业便携使用的、基于微型超短基线正四面体接收基阵定位测向技术方案[15]。首先使用互谱法计算不同阵元间的信号延时,以较小的计算量获得较高的测量方位精度,然后使用和水声数据精准同步的接收基阵姿态数据对互谱法测量方位进行修正,减少潜水员水下作业时由于姿态变化不平稳产生的目标测量方位的影响。最后对该技术方案的测向性能,特别是因多径信道、多阵元相位偏差以及作业过程姿态变化不平稳等因素对测量方位精度的影响展开仿真分析。
1 方案概述
超短基线水声定位主要是通过水声信号测量声源与定位基阵间的相对距离和方位进行定位。针对潜水员水下作业相互位置信息获取应用,水下便携定位设备包括声源单元和定位显示单元两部分。声源单元使用不同的编码区分不同的潜水员;定位显示单元将基阵接收的水声信号转换为电信号,放大调理后转换为数字信号,在数字信号处理单元开展信号检测及声源方位估计计算,并显示测量方位结果。
1.1 超短基线正四面体接收基阵测向原理


图1 正四面体接收基阵坐标系示意图Fig.1 Schematic diagram of coordinate system of regular tetrahedral receiving array
为防止发生相位模糊,阵元间距R与信号波长λ应满足关系:R<λ/2。
当目标声源到基阵的距离远大于阵元间距R时,可把基阵接收到的信号近似看作平面波。
假设目标声源N到原点的距离为L,其在XOY平面的投影为N′。目标声源与原点之间连线在XOY平面的投影如图2 中虚线所示。目标声源信号从球面角θ=(α,β)入射,其中: α为目标声源与原点连线在XOY平面的投影和X轴的夹角;β为目标声源与原点连线和XOY平面的夹角,因此定义信号传播方向的单位向量为

图2 目标声源位置示意图Fig.2 Schematic diagram of target source location

式中,负号表示信号传播方向与坐标轴方向相反。则声源位置为[Lcosαcosβ,Lsinαcosβ,Lsinβ]。
由于目标声源相对各个阵元距离不同,信号经过不同传播时间到达各阵元,这里假设目标声源N与P1,P2,P3,P4 阵元的距离为P1N,P2N,P3N和P4N,则
假设信号到达P2,P3 和P4 阵元相对于P1 阵元的时间延迟为 τ12,τ13和 τ14,则

式中,c为水中声速。由此可得出时延的计算公式
这里d相对L可以忽略,故d2忽略。
由上述公式导出目标方位角计算公式

所以得出方位角计算公式

1.2 便携式超短基线定位测向算法实现
超短基线正四面体测向原理是通过不同阵元之间的时延差计算声源的相对方位。从时域进行时延差计算需要相当高的采样率才能获得较高的定位精度,故采用频域互谱法进行时延差计算。
设2 个阵元接收到的信号分别为x(t)和y(t),其中
式中:A1和A2为信号幅度;ω为信号角频率;τ为相对时延。
令X(f)和Y(f)分别为x(t)和y(t)的傅里叶变换,则
可见时延信息包含在互功率谱的相位信息中,此相位为
从式(16)~式(18)可以得出如下结论:
1)互功率谱计算的时延差不受采样率高低影响,因此对于高信噪比信号互谱法可以较为精准地估计时延差,从而得到较高精度的定向结果。因此,使用互谱法可以以较低的采样率、较小的计算量获取较高的定位精度;
2)互功率谱计算时延不受2 个通道信号幅度大小差异影响,即对于高信噪比情况,不同通道信号的幅度一致性不会影响定位结果。
虽然接收基阵尺寸很小,但是阵元直径相比阵元间距只有约1/10,因此虽然阵元之间会存在信号遮挡,但是因阵元之间的遮挡而出现某个阵元接收到的信号在带内属于低信噪比的情况并不严重。而互谱法计算结果和各阵元接收的信号幅度一致性无关。故因阵元之间相互遮挡导致测向误差的概率不大。对于因阵元遮挡导致某个阵元接收到的信号过小的小概率情况,可以采用正四面体立体阵的其他3 个阵元进行声源目标方位计算。
1.3 声源方位姿态修正
潜水员水下作业时,其身体相对大地处于运动状态,且身体各部位也处于相互运动状态,导致便携式定位设备姿态变化不平稳,测量方位的基准坐标系不断变化。使用互谱法获得的方位测量值是针对有效数据采集时刻基阵所处坐标系,该坐标系处于不断变化中。从使用者的使用感受来看,希望显示方位角是平稳的,即显示方位角的基准坐标系是平稳的。从人的生理习惯出发,一般认为显示的测量结果是以大地坐标系为参考的,故需要在互谱法获得的方位测量值基础上进行坐标系变换,得到显示方位值。
坐标系变换算法模型以基阵阵元P1,P2 和P3 所在平面为基阵坐标系的水平面,XYZ对应大地坐标系(XOY为该坐标系的水平面),X′Y′Z′对应接收基阵坐标系(X′O′Y′为该坐标系的水平面)[16]。
假设接收基阵坐标系X′Y′Z′相对大地坐标系XYZ的横滚角为θpitch,俯仰角为θroll,方位角为θyaw。那么同一目标从接收基阵坐标系转换到大地坐标系的旋转矩阵为RxRyRz,其中

同一目标声源的方位、横滚和俯仰信息从接收基阵坐标系转换到大地坐标系的计算公式为
式中: 下标w表示测量方位角坐标系;下标c表示大地坐标系。由目标声源在基阵坐标系的距离、方位角、俯仰角和横滚角测量信息可以换算得到目标声源在大地坐标系的距离和方位显示信息。
由于潜水员姿态处于不断变化过程中,且变化不平稳,因此必须保证用于姿态修正计算的横滚角和俯仰角以及用于方位计算采集的基阵阵元数据是精准同步的。需评估基阵阵元数据采集到互谱法方位计算结束之间的时延差,使用该时延差之前的姿态信息横滚角和俯仰角进行姿态修正计算。
2 仿真验证
为验证水下超短基线正四面体接收基阵测向原理及算法理论的可行性,设定仿真参数如下: 基阵阵元间距3 cm,忽略各阵元之间的相位差;信号带宽1 kHz;中心频率20 kHz;脉宽0.02 s;采样率75 kHz;声速取值1 500 m/s。目标声源和基阵间的距离随机设定,信道噪声使用高斯白噪声。在此基础上,目标声源相对基阵的实际方位均匀覆盖360°,从0 开始每5°一个步进间隔进行扫描仿真,每次仿真覆盖72 个实际方位点。
分别设定信噪比(signal-to-noise ratio,SNR)为-3,0,3,6 和10 dB 进行多组仿真,当SNR 低于某个门限时,测向误差增大。图3 是SNR 为6 dB 的仿真结果,其中横坐标代表仿真步进点顺序,纵坐标代表测量值和实际值之间的偏差,测量方位和实际方位之间的角度偏差小于1°。仿真结果得出,在各通道信号SNR 大于一定门限的情况下,该水下超短基线正四面体接收基阵测向精度较高。

图3 SNR=6 dB 时测量方位和实际方位偏差Fig.3 Deviation between measuring azimuth and actual azimuth at SNR=6 dB
3 影响因素分析
前文的仿真是基于较为理想的水文环境,信道模型仅添加了高斯白噪声。然而实际的工程应用中存在诸多影响测向精度的因素,如多径等复杂水声信道特性、加工工艺导致的同一接收基阵不同阵元之间存在的常规手段难以校准的相位差、潜水员水下作业姿态动态变化不平稳引起测量方位和显示方位的不一致等。在仿真模型基础上分别加入上述影响因素,仿真验证四元超短基线测向算法在潜水员水下作业场景中的应用可行性。
3.1 多径复杂水声信道特性
实际水声信道非常复杂,特别是浅海环境,除了各种海洋环境噪声和舰船噪声的影响外,还存在强烈的多径效应,这些特性都会影响测向精度。
算法关注的频带相对有效采集频带可以看作窄带,因此只要发射声源级和接收灵敏度足够高,即将阵元收到的水声信号看作高信噪比信号。图4仿真基于直达波到达后延时约0.002 s 后,有1 条信号强度为直达信号0.5 倍的水底反射多径信号到达,延时约0.005 s 后有1 条信号强度为直达信号0.3 倍的水面反射多径信号到达的多径模型。由仿真结果可以看到,所有多径信号中,强度最大的海底、海面一次反射多径对测向精度影响不大,实际使用可以忽略。

图4 多径下的测量方位和实际方位偏差Fig.4 Deviation between measuring azimuth and actual azimuth under multipath
3.2 接收基阵各阵元相位一致性
由于现有机加工工艺的限制,同一接收基阵不同阵元之间存在相位差。由于接收基阵阵元间距小,常规的相位校准方法不可用。
换能器使用陶瓷材料,同一基阵的不同阵元是从同一陶瓷管切割而来,且从四元阵每个阵元的测量阻抗特性曲线来看,不同阵元之间的阻抗特性差异不大,因此同一基阵不同阵元之间相位差不会太大(小于10°)。
仿真模型以阵元P1 为基准,阵元P2,P3,P4 和P1 之间的相位差在-10°~10°之间选取随机数进行仿真。图5 是测量方位和实际方位之间的偏差。由于潜水员水下作业自身状态不断变化,对协同作业潜水员相对方位的分辨率不高。从仿真结果可知,基阵各阵元间的相位差可降低测向精度,但整体的测向趋势和实际方位变化趋势保持一致。故各阵元间相位差引起的测向误差不会影响实际应用。

图5 相位差在-10°~10°间的测量方位和实际方位偏差Fig.5 Measurement azimuth and actual azimuth deviation with phase difference between -10° and 10°
3.3 水下作业姿态动态变化不平稳
对不同接收基阵姿态(横滚角、俯仰角)下测量方位和实际方位的偏差进行仿真,获得测量方位和实际方位的差异趋势。之后使用1.3 节坐标系变换模型进行声源方位姿态修正,获得姿态修正后的显示方位和实际方位的差异。
分别取接收基阵坐标系X′Y′Z′相对大地坐标系XYZ的横滚角和俯仰角为-30°~30°之间的随机数,目标距离在10~500 m 之间随机确定,目标方位在360°内随机确定。按照上述方法选择100 组参数进行仿真。图6 是没有添加姿态修正的仿真结果,横坐标表示仿真序列,纵坐标表示测量方位和实际方位偏差。从仿真结果可以看出,由于潜水员水下作业时姿态变化不平稳而导致的测量目标声源方位和实际目标方位,即显示目标方位之间存在较大的偏差,该偏差会导致使用者主观判定的目标位置和实际目标位置之间存在较大偏差。图7是添加姿态修正后的仿真结果,从仿真结果可以看出,经过姿态修正后的测量方位和实际方位偏差很小。
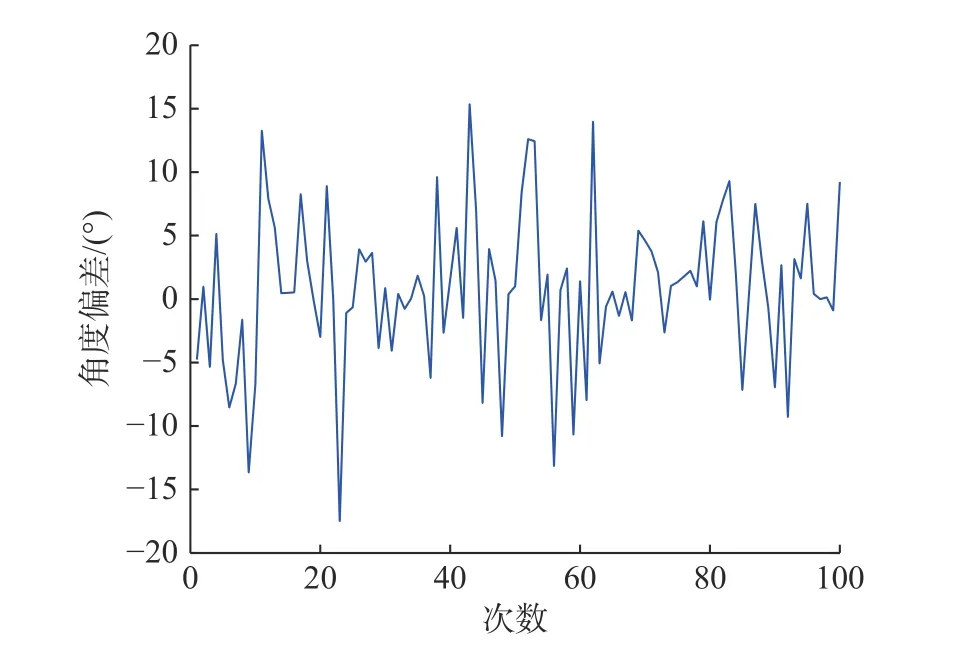
图6 坐标系变换导致目标方位偏差Fig.6 Target azimuth deviation caused by coordinate system transformation
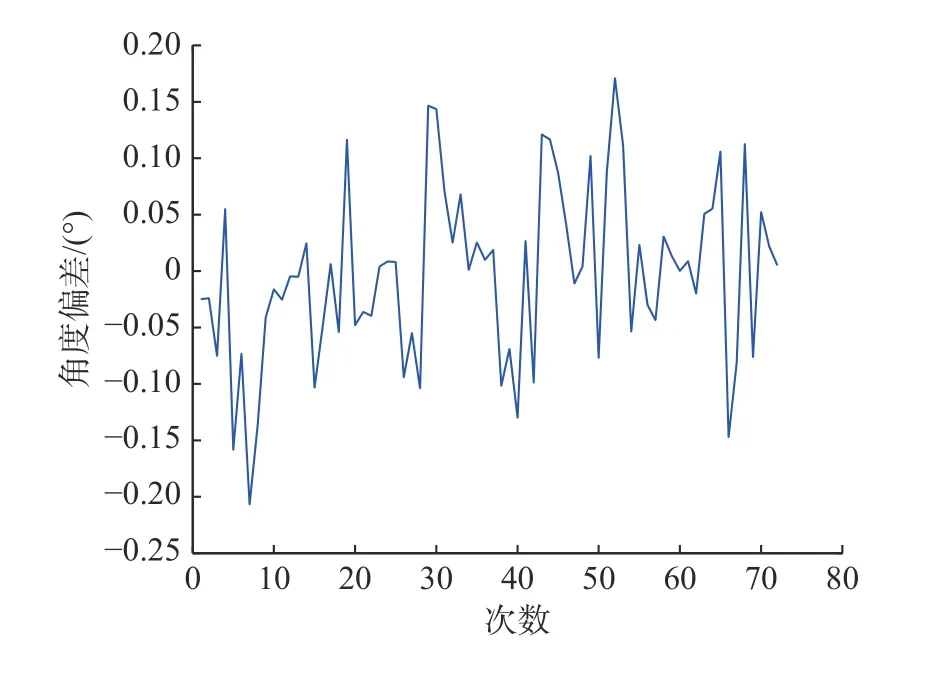
图7 姿态补偿校准后的偏差Fig.7 Deviation after attitude compensation calibration
4 结束语
所提四元超短基线定向算法使用微型超短基线基阵,能以较低的采样率和较小的计算量获得较高的定位精度,满足水下便携式设备体积小、功耗低的要求。该算法适用于信号带内信噪比较高的情况。主要影响定位精度的因素包括多径复杂水声信道特性的影响、潜水员水下作业姿态变化不平稳,以及接收基阵不同阵元之间存在相位差等。因阵元间距小导致不同阵元之间相位差难以使用常规校准手段进行修正,因此实际使用会带来一定的定向误差(小于5°)。潜水员水下作业很难保持静止状态,对5°方向误差不敏感,因此所提四元阵定向算法可以用于解决潜水员水下协同作业获取相互位置信息应用时目标声源定向问题。
