深空长时延条件下测控系统捕获应急处置方法*
2023-01-18陈少伍金文马
张 伟,刘 军,陈少伍,金文马,苏 犇
(1.西安卫星测控中心,西安 710043;2.宇航动力学国家重点实验室,西安 710043;3.浙江大学 航空航天学院,浙江 杭州 310027;4.北京跟踪与通信技术研究所,北京 100094;5.北京航天飞行控制中心,北京 100094)
0 引 言
近10年以来,我国初步建成了全球布站的深空测控网,在探月工程和首次火星探测任务中发挥了重要作用[1]。深空测控任务的特点是传输时延大、信号电平弱、多普勒动态大、测控通信信号中断频繁[2]。首次火星探测任务中,探测器与地面测控设备之间的距离最远达到4×108km,双向光行时长达44 min[3-4],对于如此之长的光行时,地面测控设备如果发生故障导致测控链路中断,按照以往的测控模式,重新建立双向链路的时间代价将长达数十分钟,在近火制动、进入下降着陆(Entry,Descent,and Landing,EDL)等重要测控弧段甚至是不可接受的。
针对这一问题,需要改变依靠下行信号状态确认后再进行上行信号流程推进的近地捕获模式,建立上下行解耦合的深空捕获模式[4]。在此基础上,深空测控设备才能缩减应急发令需要的捕获时间,实现测控链路异常中断时的快速响应。
火星探测的测控距离之远在我国尚属首次,国内未查询到长时延条件下测控应急处置的相关文献,国外航天机构深空任务设计及组织模式相关文献较多[5-15],但其捕获流程设计及应急处置方法未见公开资料。本文将对首次火星探测任务中的光行时及其对测控的影响进行分析,对近地卫星及深空航天器的捕获模式进行介绍,据此分析深空长时延条件下测控链路应急处置方法并评估其实施效果。
1 首次火星探测任务光行时分析
火星是地球的近邻,是我国行星探测任务的首个探测目标。根据首次火星探测任务设计,器地单向传输时延最长约为22.2 min。根据测定轨计算,首次火星探测任务器地距离及传输时延如图1所示。
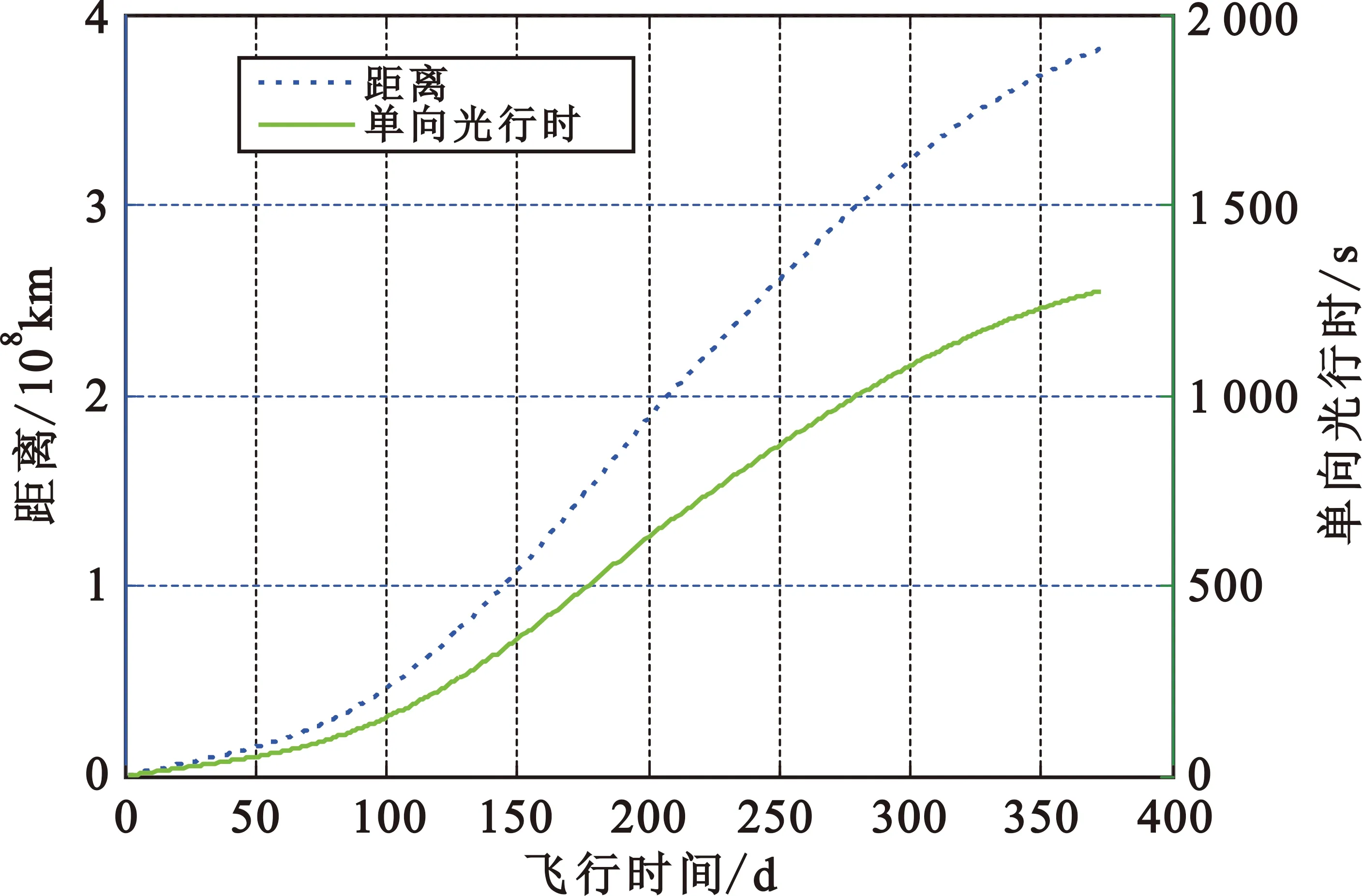
图1 我国首次火星探测任务器地距离及传输时延
光行时的增加对航天器的测控带来了显著影响:一是同一时刻地面站和航天器发射和接收的上下行信号存在很长的时延差;二是按照传统捕获方式捕获时间过长。
探测器和深空站收发信号时延如图2所示。设当前时刻为t,地面站收信号光行时为τ1,发信号光行时为τ2,t时刻地面站接收的下行信号由探测器在t-τ1时刻探测器发送;t时刻深空站发送上行信号,t+τ2时刻探测器接收到上行信号。设当前时刻为t,探测器收信号光行时为τ4,发信号光行时为τ3,t-τ4时刻地面站发送上行信号,并在t时刻由探测器收到;t时刻探测器发送下行信号,t+τ3时刻地面站接收到下行信号。
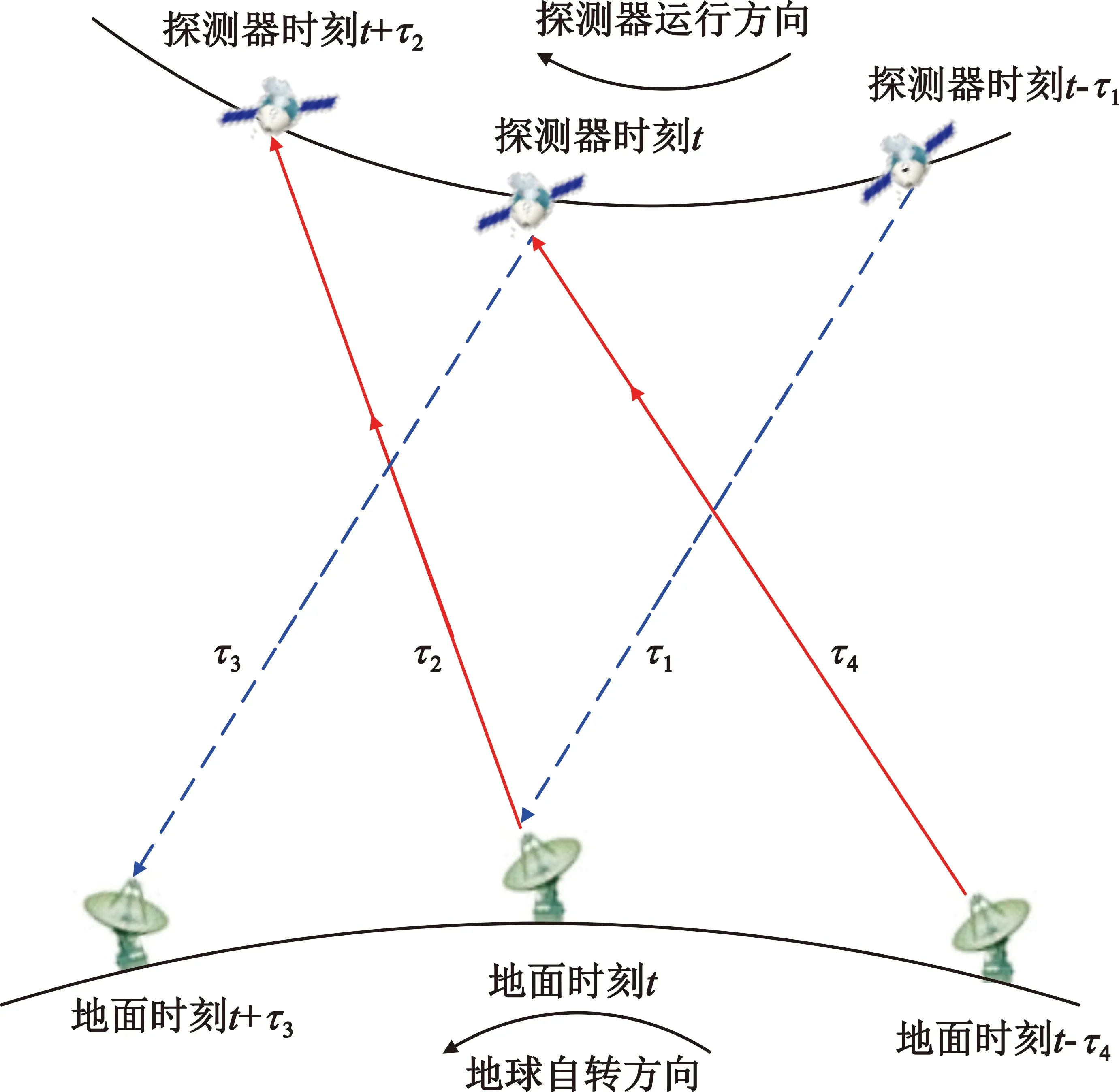
图2 探测器和深空站收发信号示意图
器地单向光行时较大时,地面站收发信号的延迟非常大,如果按照传统的捕获流程,载波双向捕获和距离捕获需多次器地往返,由此导致捕获时间将包含多个器地光行时,需要设计新的捕获流程将上行与下行信号解耦合,不再用下行信号判断执行情况后驱动上行信号完成捕获流程,从而降低捕获时间。
2 深空任务的捕获时间考量
2.1 近地卫星捕获时间
在常规模式下,地面测控设备任务弧段开始时,首先完成角度捕获锁定卫星下行信号,接着启动扫描;上行载波经过单向光行时抵达卫星,卫星完成载波锁定;载波相干转发返回地面,地面测控设备通过随扫判决或星锁信息判定双捕,控制上行扫描回零;下行信号随扫回零后,载波双向捕获完成。双捕完成后,再依次发送测距音,完成距离捕获。双向捕获和距离捕获均完成,将外测数据发送至任务中心,加调遥控副载波,具备指令发令条件,系统捕获完成。一般情况下,系统捕获完成后向卫星发送上行遥控指令及注入数据;紧急情况下可以去掉距捕流程。近地卫星捕获原理流程见图3。
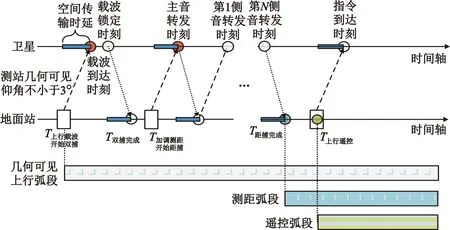
图3 近地卫星捕获流程示意图
传统双捕子流程包含1个双向光行时,距捕子流程包含7个侧音对应的7个双向光行时,地面站系统捕获时间的计算公式如下:
t近地系统捕获=t角捕+t双捕+2t光行时+t距捕+
14t光行时+t送数+t加调遥控。
(1)
地球轨道卫星一般距离为4×104km,16个光行时占用系统捕获时间约为2 s,地球轨道卫星的系统捕获时间一般为20 s左右,因此光行时占系统捕获总时间的比例较小,可忽略光行时影响。
2.2 深空探测器捕获时间
深空探测器捕获模式包括常规模式和为深空模式,具体系统捕获方式为常规扫描、常规预置、深空扫描、深空预置四种。在以往月球探测任务中,深空站主要使用常规扫描捕获方式;首次火星探测任务中深空测控设备主要使用深空预置捕获方式,应急情况下,可根据需要采用深空扫描捕获方式。
在深空预置模式时,考虑光行时影响,深空站在任务开始后,分别同时开始下行与上行工作,锁定探测器下行信号后向任务中心送出遥测数据,发送含上行多普勒频率预置(考虑光行时影响)的上行载波,载波保持一定时长满足探测器锁定上行载波的要求后发送测距音,测距音按照预定时间间隔依次发送;测距音发送完成后,加调遥控,经过单向光行时,上行载波抵达探测器,载波保持的时长使探测器能够可靠锁定上行载波;此后测距音按照时间间隔依次到来,探测器对测距音依次相干转发,再经过器地空间传输,地面先后接收到探测器下传的遥测信息(包含探测器上行信号锁定情况)和测距音,任务中心完成探测器上行链路锁定状态判断后,向深空站发送“航天器上行链路状态”信息;深空站依据上行链路和下行链路的锁定情况完成双捕判决,距捕完成后将外测数据发送至任务中心,至此系统捕获完成。
在实际工作中,为保证遥控指令执行的可靠性,避免一次捕获不成功造成指令不执行的不可逆影响,一般情况下需要在任务中心完成探测器上行链路锁定状态判断或者深空站判断双捕后才开始发送遥控指令和注入数据。深空任务捕获流程见图4。
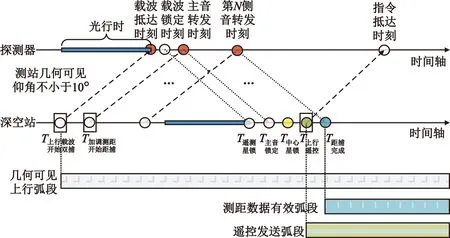
图4 深空任务捕获流程示意图
深空双捕子流程包含1个双向光行时,距捕子流程不再包含光行时,深空站系统捕获时间的计算公式如下:
t深空系统捕获=t角捕+t双捕+2t光行时+t距捕+t送数+t加调遥控。
(2)
深空捕获模式改进虽然比传统捕获模式省去了7个双向光行时的时间,但是仅仅1个双向光行时导致的系统捕获时间以器地距离4×108km计算就达到44.4 min。虽然深空微弱信号的锁定比较耗时,但通常在数分钟以内,相比载波和测距音的锁定用时,深空任务中光行时在系统捕获时间中的占比较大。
2.3 应急处置捕获流程设计
在首次火星探测任务中,由于深空网全球布站使探测器可测控时间覆盖率达到90%[1],正常情况下,为保证遥控执行的确定性,系统捕获所耗费的数十分钟开销是可以接受的,但是如果发生测控链路中断等异常,在问题排除后需尽快发送指令的情况,长达数十分钟的捕获时间开销则难以承受,因此应急处置捕获流程需进一步缩短捕获时间。
任务应急处置捕获流程见图5。应急处置捕获时,深空测控设备在上行载波(含多普勒频率预置)发出并保持一定时间后,依次发送上行测距音,随后加调遥控,上行捕获流程完成。此时上行信号虽未到达探测器,但已具备上行遥控发送能力,任务中心可正常发送遥控指令或注入数据。待双向光行时后,探测器锁定指示等工程遥测下传到地面后,可确认遥控指令接收及执行情况。
图5 深空任务应急处置捕获流程示意图
应急处置捕获时间不再包含光行时,仅包含用于双捕的预置保持时间和用于距捕的测距音发送时间,通常为数分钟,此用时能够保障深空任务应急处置时的快速发令需求。深空站应急处置捕获时间的计算公式如下:
t应急处置捕获=t角捕+t双捕+t距捕+t加调遥控。
(3)
紧急情况下,捕获流程中可去掉距捕子流程,捕获时间仅包含用于双捕的预置保持时间,进一步保障了深空任务的快速发令需求。此时捕获时间的计算公式如下:
t紧急情况捕获=t角捕+t双捕+t加调遥控。
(4)
2.4 不同捕获流程的捕获时间分析
综上所述,对于不同捕获流程,假定探测器距离4×108km,利用信道模拟器搭建环路,设置载波信噪比为30 dBHz(高于门限10 dB),在此情况下仿真分析捕获时间,结果见表1。
表1 不同捕获流程的捕获时间
由此可见,传统上下行耦合的捕获模式带来的光行时开销已不适合深空场景,而深空捕获模式中的双向光行时在应急处置或紧急情况需快速发送遥控指令时也难以接受,在此情况下应急遥控指令发送不再等待双向光行时进行双捕判决,上行捕获流程完成后即发送遥控指令可有效缩短应急的响应时间。应急处置和紧急情况捕获流程在深空任务中使用还需要对可靠性进行实测。
3 深空任务应急处置实例
首次火星探测任务应急处置的场景主要有两个,一是探测器多组收发天线之间的正常切换,二是由探测器或地面测控设备异常导致的测控链路中断。为了验证应急处置捕获流程的可靠性,模拟地面测控设备故障,对应急处置流程进行了实测。
3.1 应急处置案例
深空测控设备分机多为双机热备份,当单机发生故障时,切换为热备份,切换后启动应急处置捕获流程。发射机速调管故障是深空站的常见故障,本文以发射机速调管故障为例对地面测控设备故障应急处置流程进行说明,如图6所示。
图6 发射机速调管故障应急处置协同工作流程
当深空站将故障定位到发射机速调管后,调度报告任务中心并同步按照故障预案进行处置,速调管为热备份单机,因此需要去激励并切换上行信道链路为备份速调管链路;随后基带信号输出,并通过备份上行链路将信号发出,待信号功率平稳后启动应急处置捕获流程,上行捕获流程结束后调度报告。此时应急处置完成,可正常开展遥控指令发送工作。此后深空站可择机开展故障速调管的处置,排除故障。
3.2 故障应急处置测试验证
深空站模拟发射机速调管故障进行了应急处置和紧急情况处置的过程演练,并在首次火星探测任务中开展了实际应用,处置时间和成功率统计结果详见表2,其中处置时间是对多次处置结果取算术平均。
表2 应急处置时间及成功率
通过故障模拟演练和任务实际应用的结果可以看出,在长光行时条件下深空测控系统应急处置时,任务中不能发送遥控指令和注入数据的时间为故障处置时间和上行捕获流程时间,不含光行时和下行捕获流程所用时间。统计成功率表明,应急处置流程和紧急情况下的处置流程完成捕获的可靠性很高,可以在深空任务中使用。
4 结束语
深空探测任务中的长光行时条件造成测控通信链路正常捕获时间大幅增加,给测控通信链路异常中断的应急处置带来了难以接受的时间开销。在深空测控设备的捕获模式中分离上行与下行,放宽任务的确定性要求换取快速响应时间,实现应急处置需求,通过深空测控设备故障处置案例的模拟测试和在首次火星探测任务中的应用测试证实了该方法的可用性。在保证工程可靠性的条件下缩短捕获时间,在未来深空探测更长光行时条件下实施可靠且灵活的应急处置是后续工作中需要不断探索且必须实现的使命任务。
