树冠振动式油茶果采摘机设计与试验
2023-01-16吴问天郭医博高宁煜
吴问天 郭医博 高宁煜
(铜陵学院,安徽 铜陵 244061)
目前我国拥有油茶林面积大约7,000万亩,主要分布于丘陵山区,兼顾较高的经济效益、生态效益、社会效益,已发展成为乡村振兴的支柱产业。但是油茶收获周期短、过度依赖人工、劳动强度大、机械化程度薄弱等问题[1-2],严重制约了油茶产业的发展。在此背景下,设计研制一款油茶果采收机械就成为解决问题的关键。
目前,国内外林果类采摘的主要方式有两种:一种是基于图像识别技术设计的采摘机器人,主要用于采摘要求较高的林果如:草莓、番茄、葡萄等[3-4];一种是基于谐振原理设计的振动式采摘机械,主要用于采摘要求较低的林果如:橄榄、柑橘、红枣等[5-9]。但油茶是我国特有树种,国外几乎没有相关研究;而我国林业采摘机械又处于起步阶段,且油茶的花果同期特点,进一步增大了机械化采摘难度。导致目前参与研发的高校和研究所都处于理论研究和试制试验阶段[10-11]。本文基于油茶——果枝分离力测定试验的分析,提出一种树冠振动式油茶果采摘机,并通过正交试验确定采摘最优参数组合,为最终实现高质量(高采净率,较低花苞损伤率)的油茶果机械化采收提供思路。
一、油茶——果枝分离力测定
(一)试验设备与方法
油茶果实与树枝分离力的大小,是油茶果采摘装置设计的核心依据。故在采摘装置设计之初,进行了相关测定试验。试验名称:油茶——果枝分离力测定;试验地点:安徽省舒城县油茶试验田;试验时间:2019年10月;试验对象:成熟期长林1号油茶树种;试验设备:基于Labview技术设计的油茶——果枝分离力测试台。该测试台具有实时数据采集和显示存储功能,试验台结构示意图如图1所示。根据前期测定试验发现,果实脱落力的大小和果实受力方向相关,为了进一步验证相关性,随机选取80个样本,分为两组;一组选择果实受力方向与其自然生长方向夹角为0度,另外一组选择夹角为90度,分别进行果枝分离力测定。测得的试验数据如图2所示。
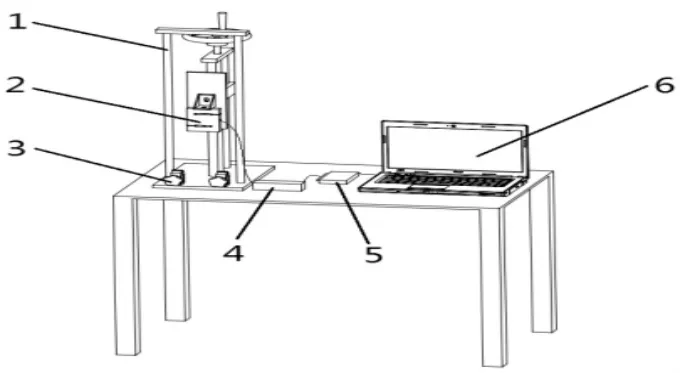
图1 试验台结构示意图
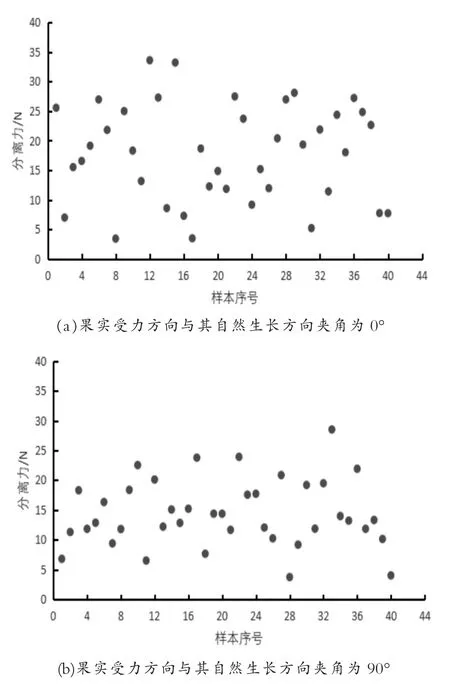
图2 油茶果在不同作用力方向下的果实和树枝的分离力
(二)试验结果分析
由图2可知:作用力方向与果实自然生长方向相同时,即夹角呈0度时,测量样本值主要分布在15-18N,最大分离力为33.61N,最小值为3.42N,平均分离力为17.92N;当作用力方向与果实自然生长方向呈90度夹角时,测量样本数值主要集中在15N附近,最大分离力为28.51N,分离力平均值为14.39N。
根据测量的数据对比分析可得,样本作用力方向与果实生长方向呈90度夹角时,果枝分离力要比作用力与果实自然生长方向一致时测得的果枝分离力要小得多。所以当果实水平左右摆动,更易脱落。
二、整机总体结构与工作原理
(一)总体结构
树冠振动式油茶果采收一体机总体结构如图3所示,主要由动力总成、履带式底盘、采摘装置和输送装置共同组成。为了保证采摘时通过性,整机选择龙门式架构;两个采摘装置对称安装在龙门框架两侧,进行油茶果采摘工作;同时基于安徽省油茶田主要分布于丘陵地区这一特点,选择履带式底盘结构;其中采摘、行走和输送等所有动力均由动力总成提供。
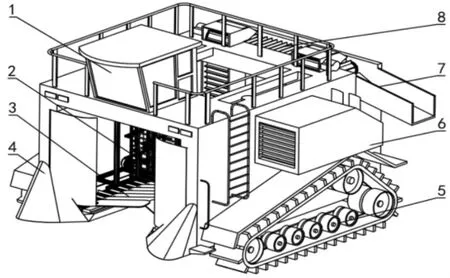
图3 油茶果采收一体机总体结构
(二)工作原理
采收一体机采用骑垄作业的形式,自行到达合适的采摘位置,此时整机两侧采摘装置在动力总成的控制下深入油茶树的树冠中,通过在水平方向上的激振作业,实现油茶果实的脱落。采摘下来的油茶果在梳齿结构的辅助下滚落于两侧的传动带上,通过输送装置最终输送到出料口位置,落入旁边的收集车当中,整个采收作业到此完成。
三、基于ADAMS仿真分析
(一)ADAMS仿真模型
由于树冠振动式油茶果采收一体机结构太过复杂,为了尽量真实的模拟采摘装置作业情况,设计了专门的采摘装置试验台,结构如图4所示。

图4 油茶果采摘试验台总体结构
本文在Pro/E软件中建立油茶果采摘试验台三维模型,利用ADAMS与Pro/E的接口将采摘试验台模型导入ADAMS软件中进行动力学仿真。
(二)材料属性定义
模型导入后,分别添加各组件材料如表1所示。
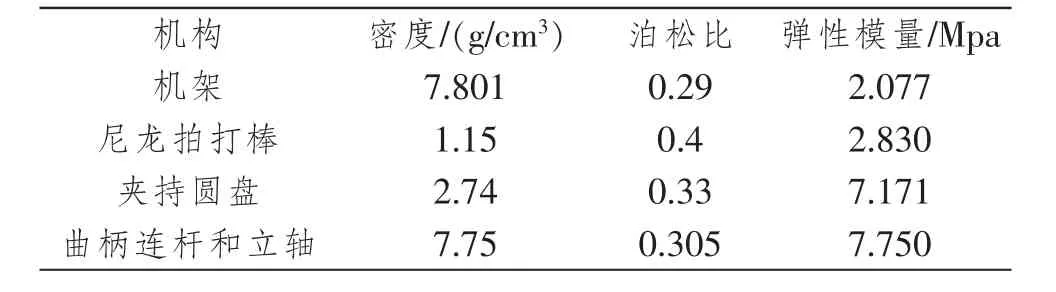
表1 材料属性
(三)约束和驱动添加
根据采摘装置实际运行情况,对试验台各部件进行条件约束。大地和试验台架、各轴承座和试验台架以及滑轨和试验台架等设为固定副;曲柄连杆和采摘装置之间设定为转动副;采摘装置和滑轨之间设为移动副;驱动副设置在曲柄上,随着曲柄的旋转,采摘装置实现在导轨上的左右振动,如图5所示。
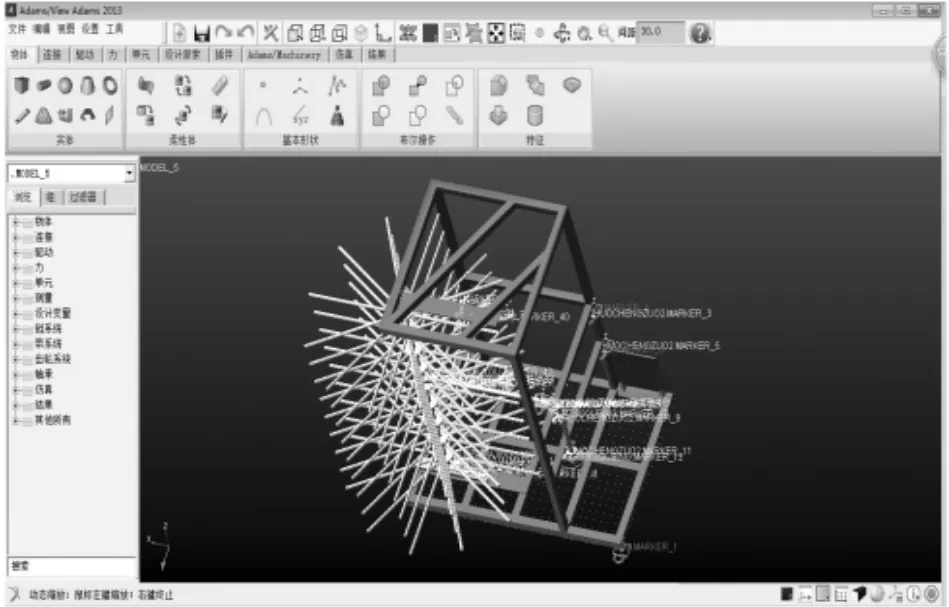
图5 约束的添加和驱动
(四)仿真结果分析
设置仿真分析时长设为5s,仿真步数定为50步,选择动力学仿真类型,其他设置为默认,即开始仿真分析。待仿真结束后进入后处理模块,设定振动频率为20Hz,振动幅度为100mm,拍打棒材质选为尼龙。选取拍打棒质心点paidabang8.CM作为对象,得到拍打棒沿X轴方向的拍打力仿真曲线,如图6所示。
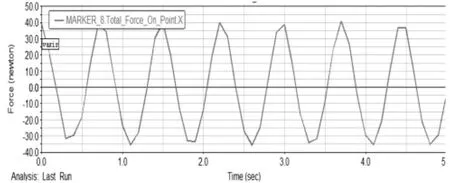
图6 采摘装置拍打力仿真曲线图
根据油茶果与树枝分离力试验,油茶果实脱落的最大分离力为33.61N,而采摘装置中拍打棒的拍打力F=40.1N>33.61N,因此采摘机构满足油茶果采摘要求。
四、田间试验
(一)试验条件与设备
采摘试验于2019年10月2日舒城的油茶园中进行,选择8棵生长周期相同,花果分布情况相近的“长林1号”油茶树种为试验目标。该树种果与花交错分布,树枝分布密集。树高1.7-2.3米,植株行、间距2.5米,果高0.3-1.9米,结果深度0.1-0.3米,树冠直径1.5-2米。
试验设备:卷尺、变频控制器、尼龙棒、松木棒、空心铝合金棒、采摘装置试验台等。

图7 采摘试验现场图
(二)试验方法
通过对采摘机理和前期研究分析可知,影响采摘效果的主要因素为:A振动时间;B振动幅度;C振动棒材料;D振动频率。因此选定以上4种因素进行正交试验。为了更好评价采摘结果,选择采净率和花苞掉落率为性能评价指标。
1.采净率:

式中:P1为采净率 (%);N1掉落的果实数量(个);N2采摘前果实数量(个)。
2.花苞掉落率:

式中:P2为花苞掉落率(%);M1为采摘后剩余花苞数量(个);M2为采摘前花苞数量(个)。
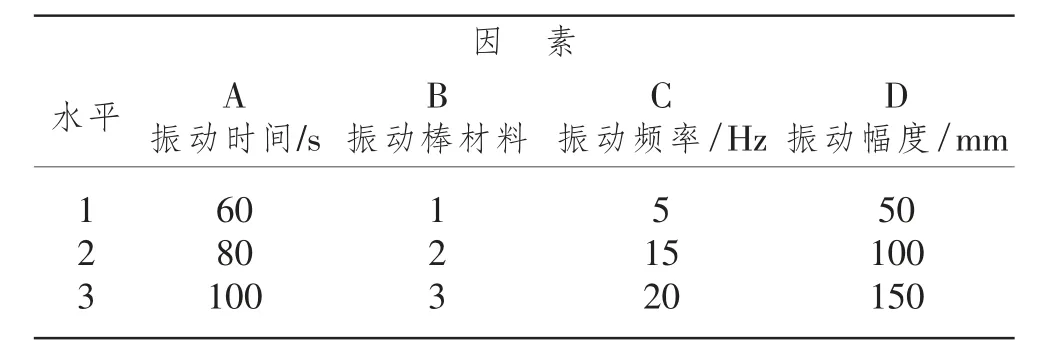
表2 正交试验因素水平表
(三)试验结果分析
正交试验安排与极差分析如表3所示。
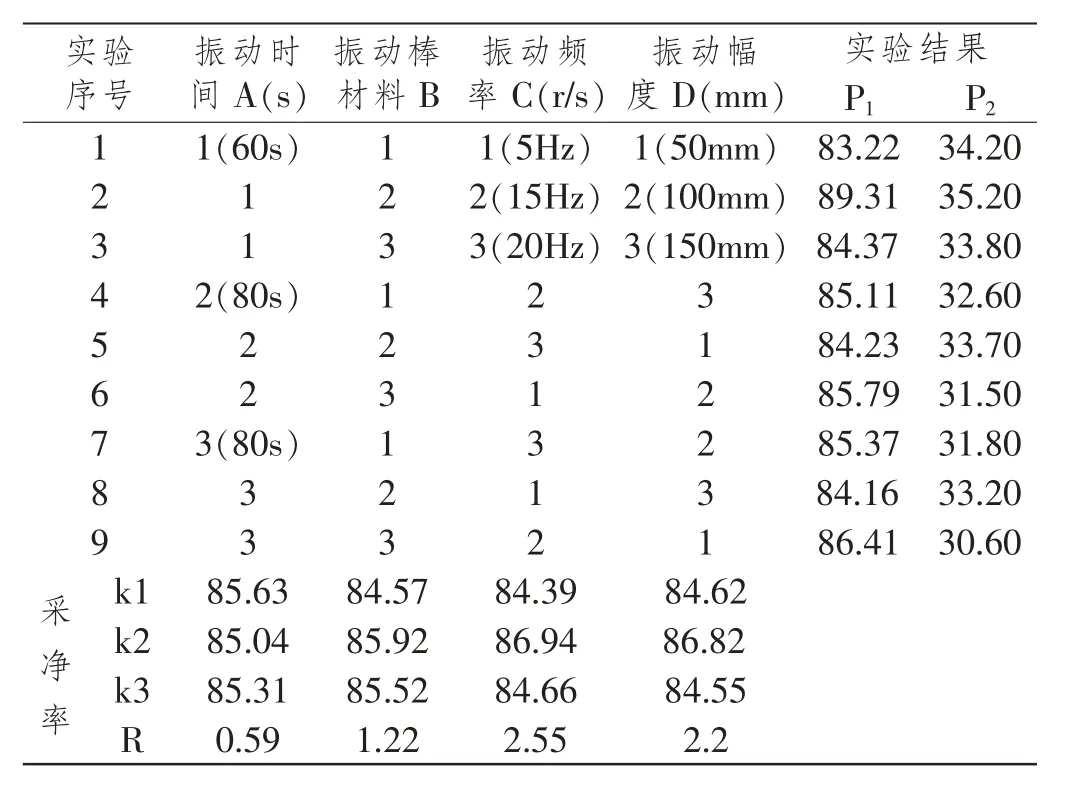
表3 正交试验安排与结果
通过表中的极差分析可知,影响采净率的最主要因素为振动频率。次要因素为振动幅度和材料,而时间的影响相对较小。林果类采摘机械的性能优劣还是更加重视采净率的大小,采净率越高,采摘效果越好,所以可以确定A1B2C2D2为最优组合,即振动时间为60S、振动棒材料选用尼龙棒、振动频率为15Hz、振动幅度为100mm。此时采净率为89.31%,花苞掉落率为35.20%。
虽然该采摘装置采摘效率远远超过人工采摘,但是根据采摘现场调研结果可知,人工采摘时花苞损伤率在15%-25%范围内,明显低于机械采摘时花苞损伤率。想要在不影响油茶果树来年产量的情况下,实现油茶果机械化采收,还需要进一步考虑花苞因素,对采摘装置结构参数进行优化。
五、结论
为满足油茶果机械化采摘的需要,本文基于油茶果-果枝分离力测定试验结果,设计了一款树冠振动式油茶果采收一体机。经过ADAMS虚拟仿真分析和田间试验,确定了采摘装置的可行性。田间试验结果表明:在振动时间为60S、振动棒材料选用尼龙棒、振动频率为15Hz、振动幅度为100mm的作业参数组合下,油茶果采净率最高,为89.31%,此时花苞掉落率为35.20%。