基于改进D-S证据理论的MPAR行为状态识别方法
2023-01-14高天昊董尧尧王鹏达姜浩浩
高天昊, 曲 卫, 董尧尧, 王鹏达, 姜浩浩
(航天工程大学,a.研究生院; b.电子与光学工程系,北京 101000)
0 引言
随着军工装备和军事理论的迅猛发展,以多功能相控阵雷达(Multifunction Phased Array Radar,MPAR)为代表的新式雷达装备逐步进入信息化战场,其释放的各种电磁信号,与自然界产生的电磁信号构成了日益复杂的电磁环境[1],具有电磁场实时改变、频谱无限宽、能量密度不均、信号种类多样以及携带信息复杂等特点。与此同时,MPAR具有灵活调度时间、空间和能量资源的能力以及多工作模式的特点,在认知电子战中扮演重要角色,世界各国加紧展开对多功能相控阵雷达的行为认知研究,期望通过对其行为规律的研究为指挥决策和干扰决策提供直接有效的情报支援。
早期的MPAR行为研究工作起源于VISNEVSKI[2]句法建模,其以“雷达字(Radar Word)”为最基本的模型单元,构建了雷达字、雷达短语和雷达句子逐级递进的层级模型。后续进行多功能相控阵雷达的行为分析,也大多基于句法模型。部分专家学者进行了雷达字提取的研究[3-5],并取得了初步成效,但这仅仅是作为多功能相控阵雷达行为研究的底层,仍需加强对后续更高层次行为的研究。近10年来又有研究人员陆续开展MPAR工作模式识别研究[6-9],但大多基于空基和海基多功能相控阵雷达,不具有通用性。本文重点关注多功能相控阵雷达更高层次的行为状态,为建立一个泛化能力更强的行为状态识别方法展开研究。
1 MPAR行为转变内、外因分析
1.1 战场环境态势
1) 任务需求。MPAR通常装载在较为先进的战机、战舰和一些地基武器平台上,而这些平台在不同时刻、不同地点往往有着不一样的任务,这在很大程度上影响了平台上所搭载的MPAR的行为状态。
2) 安全需求。MPAR作为体制先进的雷达,不仅造价昂贵,而且是技术密集型产品,所以MPAR的行为状态转变很多时候也要从自身安全去考量,这也是影响MPAR行为状态改变的一个关键因素。而影响自身安全的最直接的因素就是敌方的威胁,包括敌方作战平台的载弹量、武器弹药的有效攻击距离和弹药毁伤程度等方面。
1.2 空间运动状态
当MPAR的行为状态发生改变时,通常都伴随着其空间运动状态发生改变。根据WANG等[10]的研究,多功能相控阵雷达行为状态的改变除了与战场态势有关,还与其自身和检测识别目标的相对空间运动状态有关。当检测目标与MPAR距离相对较大且检测目标处于低速运动状态时,MPAR转变为搜索的概率会大于持续跟踪的概率。如果检测目标速度不断加快,径向朝自身驶来,距离相对较大,那么MPAR的资源调度系统会将更多的资源分配给跟踪任务。因此,搭载MPAR的武器平台的距离d、速度v、加速度a等空间运动状态信息与MPAR行为状态的转变密切关联。
1.3 天线扫描方式
相较于常规雷达,MPAR有着更加复杂的系统结构,其中一个极为独特的部分就是相控阵雷达天线。天线波束扫描是体现雷达工作特性的一个重要方面,具体是指为了能够实现对目标区域的有效监测,天线的波束通常会按照某种规律或规则对目标区域进行照射,所以天线扫描方式(Antenna Scanning Type,AST)[11]也是影响MPAR行为状态变化的一个重要体现。
2 D-S证据理论的改进
2.1 D-S证据理论存在问题分析
D-S证据理论在数学公式的推导上是非常严谨的,但是在实际使用的过程中,面对一些极端情况,进行D-S证据理论融合会得到不切实际的判决结果。以MPAR行为状态识别为例,假设包含的行为状态样本空间为Θ={S,A,N,R,T},其中,S为搜索,A为捕获,N为非自适应跟踪,R为距离分辨,T为跟踪保持。2条隐马尔可夫链的基本概率赋值如下所述。
HMM1支持度为m1(S)=0.37,m1(A)=0,m1(N)=0.01,m1(R)=0,m1(T)=0.62;HMM2支持度为m2(S)=0,m2(A)=0.72,m2(N)=0.01,m2(R)=0.28,m2(T)=0。
如果使用传统D-S证据理论,求得冲突因子K=0.000 1,使用传统D-S证据理论合成规则可得m(N)=1,m(S)=m(A)=m(R)=m(T)=0。2条隐马尔可夫链对N的支持度很低,但最后判决结果100%的指向为N,这显然与实际结果相差甚远。其次,当HMM1中对A的基本概率赋值增加0.01后,其融合的结果m(A)将变为0.986,说明算法鲁棒性很差。在基本概率赋值有微小变化时,融合结果将发生剧烈变化。此外,如果之前某个证据源对某状态的支持度为0,无论怎么增加证据对该状态的支持度,最后的融合结果也仍然是0。
2.2 D-S证据理论的改进
根据2.1节对传统D-S证据理论的分析可知,传统D-S证据理论主要有3大缺陷:1) 对特殊基本概率赋值的融合结果很差,容易误判;2) 算法鲁棒性很差,在细微概率赋值变化的情况下,融合结果发生剧烈变化;3) 当某焦元支持度为0时,存在“一票否决”现象。为了克服传统D-S证据理论的不足,本文不改变合成规则,主要对证据模型进行改进,淡化证据冲突对融合结果的误判影响。
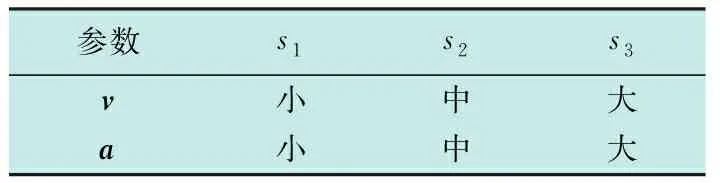
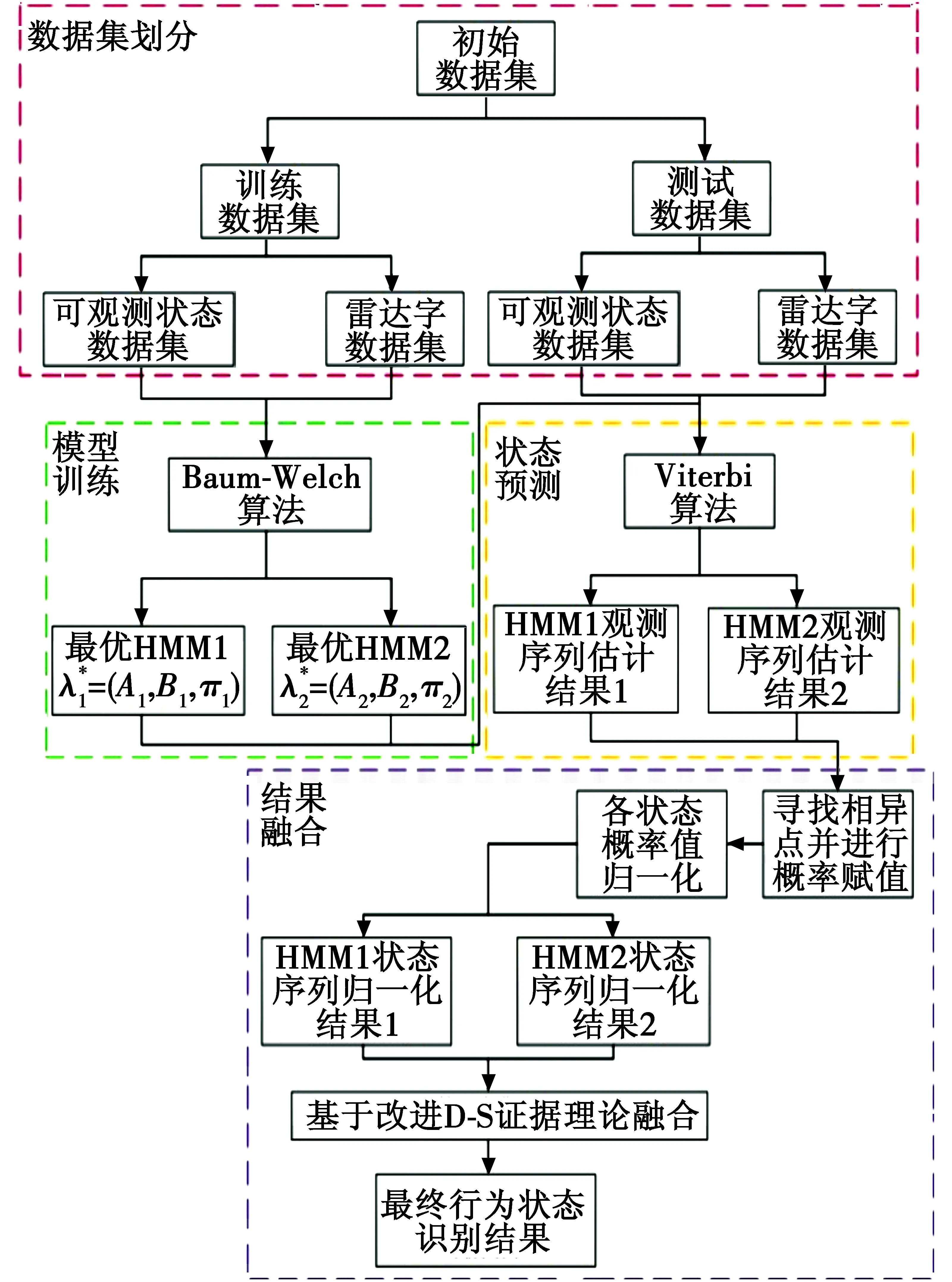
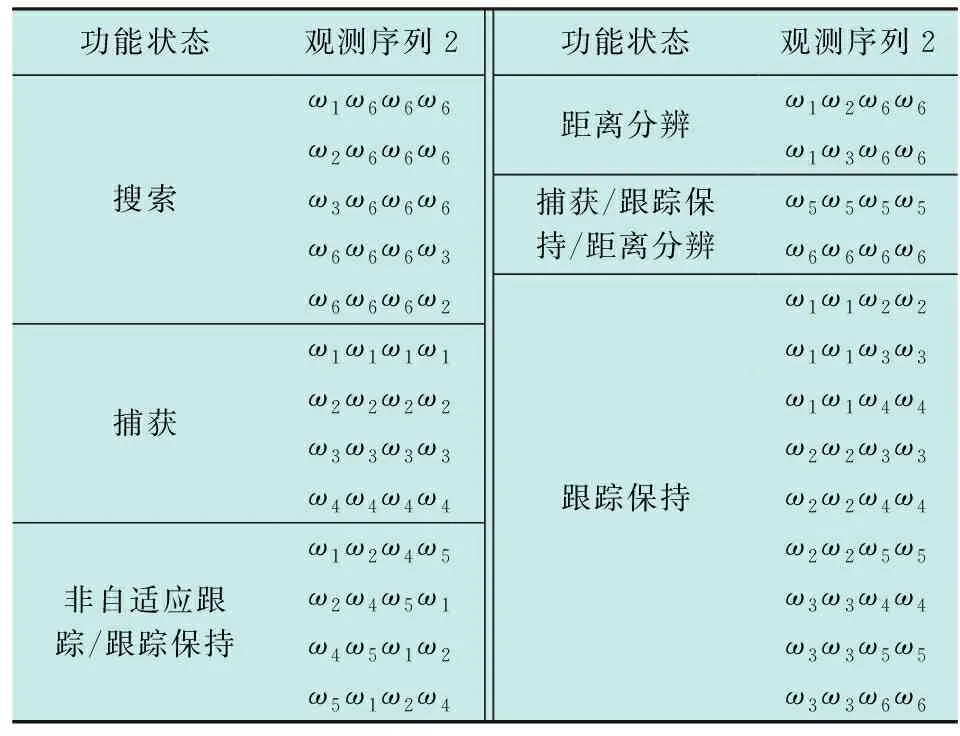
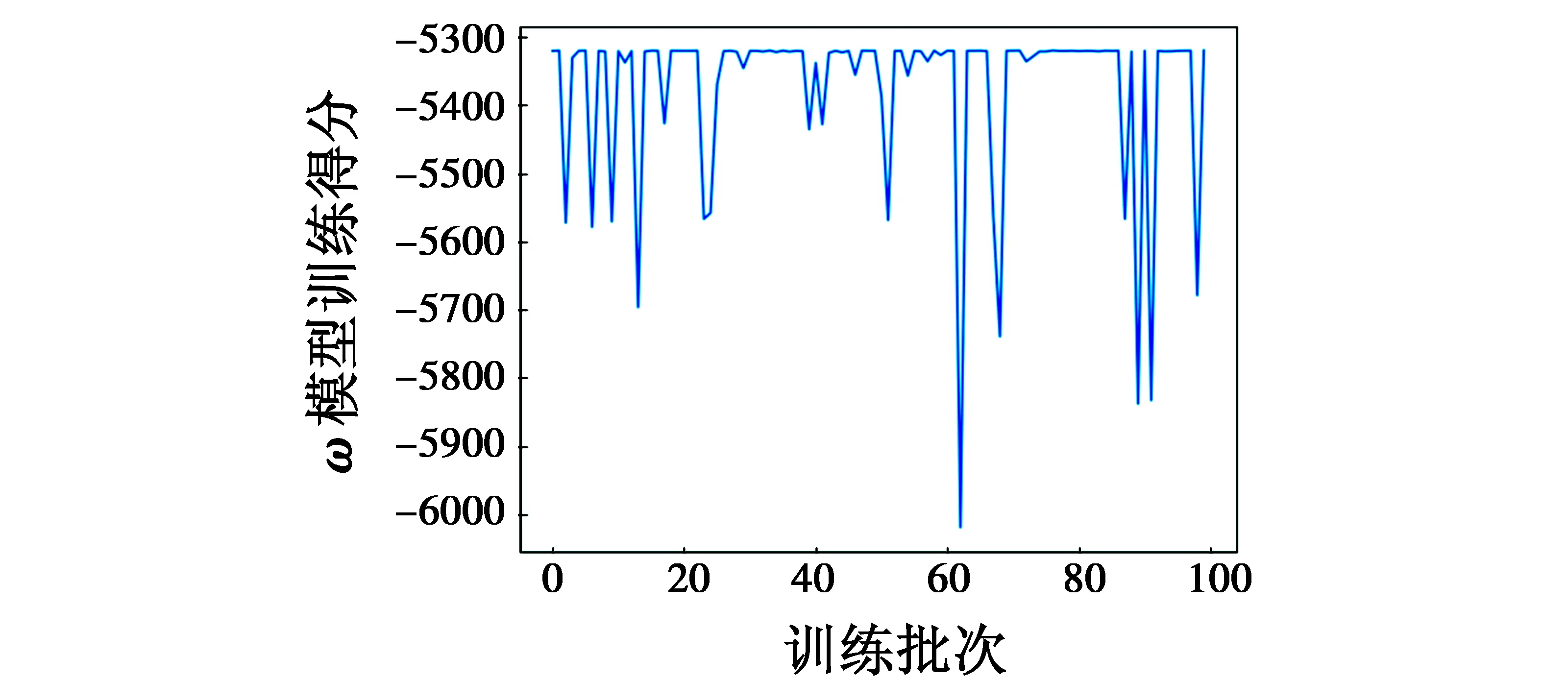
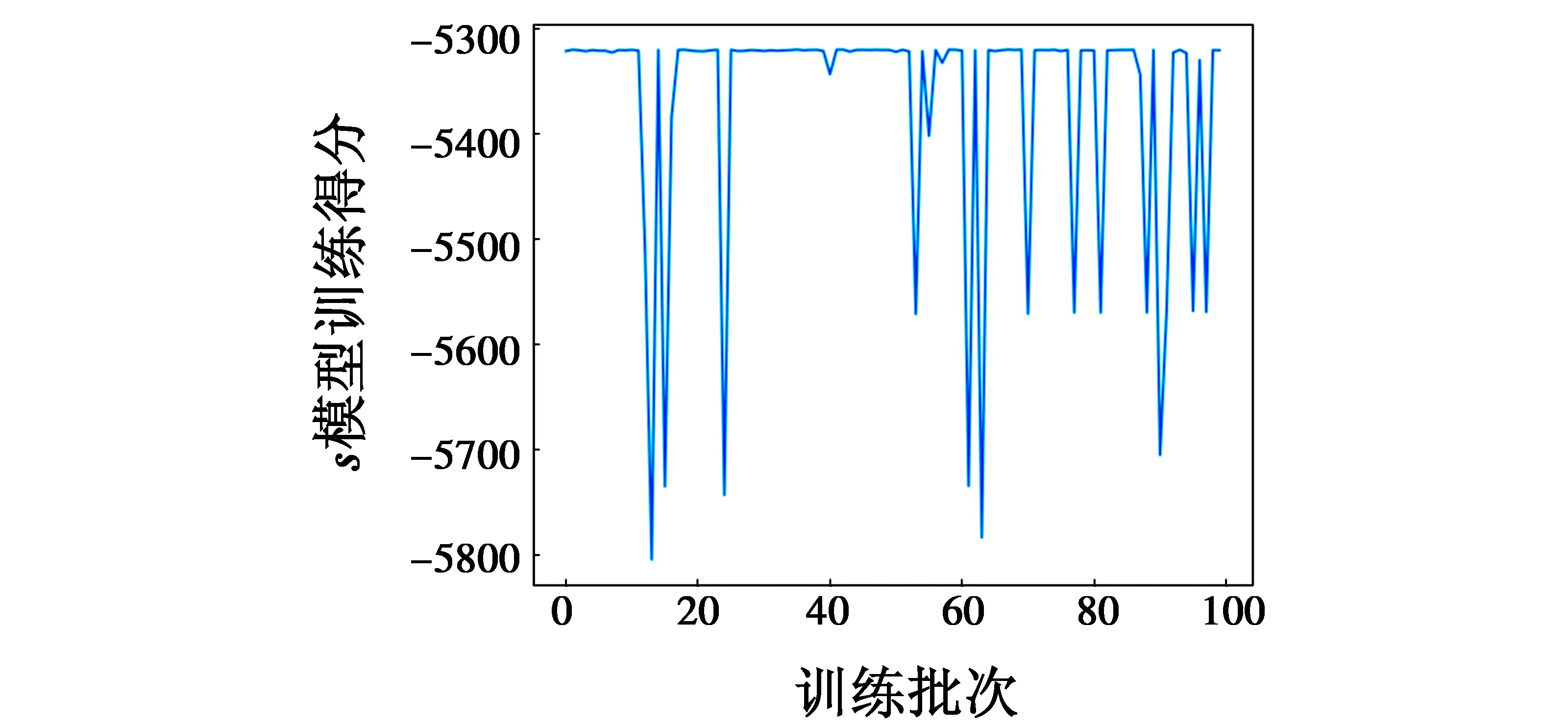
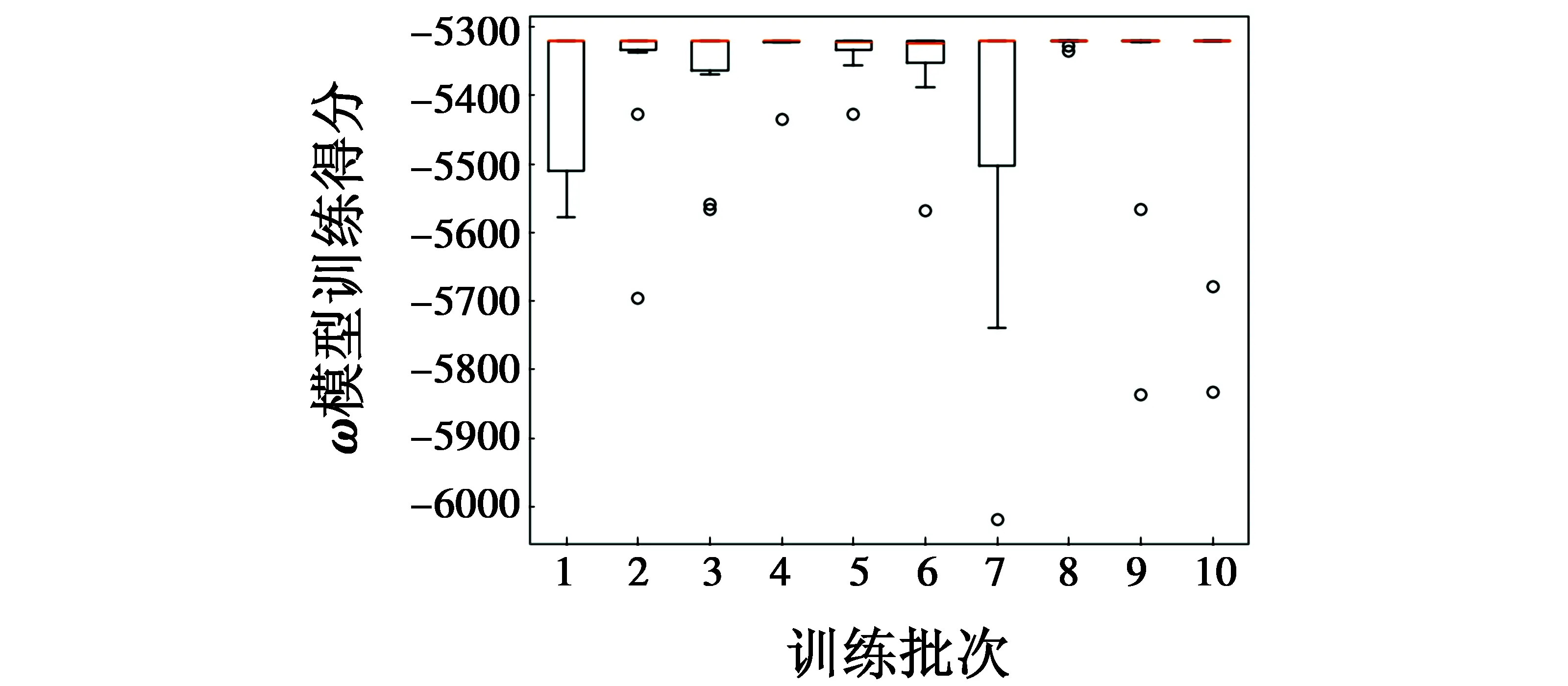
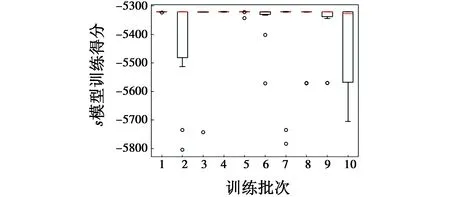
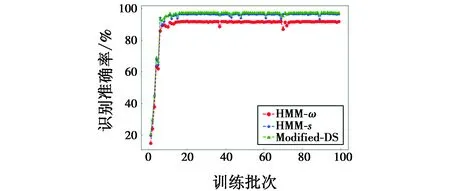
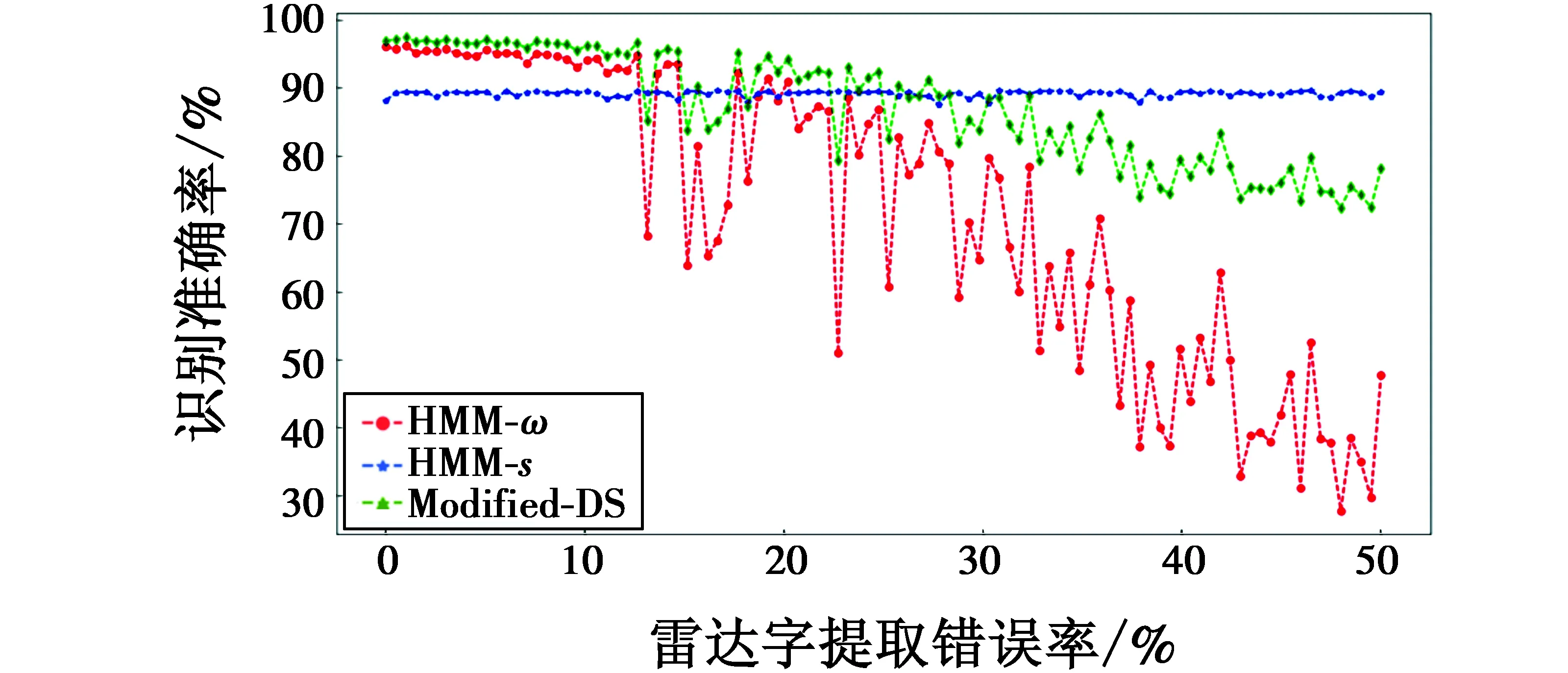
假设存在p个证据源,q个焦元元素,第j个证据源对第i个焦元的基本概率赋值为mj(Ai)。首先引进平均证据体,即将所有现有的证据进行平均,得到平均概率赋值,作为一个新的证据体。将平均证据体对第i个焦元的基本概率赋值记为mave(Ai)(0 (1) 该方法可以有效解决“一票否决”的问题。此外,由于在实际的判决过程中,每个证据源的可信度并不是完全相同的,因此在进行最后的融合时还应考虑不同证据源的支持度。通过引进每个证据源的可信度α,得到带可信度的基本概率赋值,记为mα(Ai)(0 α=[α1α2α3…αp] (2) (3) 影响MPAR行为转变的内、外因有很多,但是现有研究大多是基于雷达字数据进行其行为的识别工作。本文以雷达字信息为主体,通过加入运动状态和天线扫描方式两个辅助信息,提出了一种基于改进D-S证据理论和HMM的MPAR行为识别方法。 该方法首先引入HMM,将MPAR的运动状态和天线扫描方式作为构成第1条隐马尔可夫链的观测集。 一方面,由于侦察方不能确定敌方的具体攻击目标,所以运动状态中的距离d作为无效参数被删除。按照MPAR的运动状态,根据数值的相对大小建立不同的参数对应关系,如表1所示,以此区别小、中、大3个层次。不同的层次对应于MPAR不同工作状态下的行为特性,是后期进行MPAR行为辨识的重要依据之一。 表1 MPAR运动状态描述Table 1 Description of MPAR motion states 另一方面,AST作为推断MPAR行为状态的重要依据,也是后期仿真数据集构造的重点内容之一。按照不同的属性,可将天线的扫描方式分为不同的类别。本文主要从天线波束的驱动机制进行分类,将MPAR的AST分为电子扫描(Electronic Scan,ES)和机/电混扫(Mechanical/Electronic Mixed Scan,M/EMS)两种。 由于M/EMS本身采用的天线也是ES,所以在进行仿真时将其定义为一维电扫(One-Dimensional Elctronic Scan,1D ES),将能同时测量方位向和俯仰向的AST定义为二维电扫(Two-Dimensional Elctronic Scan,2D ES)。同样采取表的定义方式,将1D ES的AST对应于字母s1,将2D ES的AST对应于字母s2。 (4) 将雷达字序列作为构成第2条隐马尔可夫链的观测集,记为V2。假设MPAR的雷达字共6个,分别是ω1,ω2,ω3,ω4,ω5,ω6,假定其只包含26种不同的状态,每种状态对应4个雷达字,构建MPAR的第2个观测集,即 (5) V1和V2一起构成一个双链HMM。先后运用Baum-Welch和Viterbi算法估计观测序列所隐藏的行为状态序列,最后运用改进的D-S证据理论融合2条HMM链的估计结果,通过概率判决得到最后的结果。本文所提算法将MPAR行为识别问题转化为一个概率估计结果的融合问题,主要分为4个小框架来完成最终的行为辨识目的,具体算法的流程见图1。根据算法流程图,4个框架依次为数据集划分框架、模型训练框架、状态预测框架和结果融合框架。 图1 算法流程图Fig.1 Flow chart of the algorithm 1) 数据集初始化和划分。首先将初始的MPAR运动状态和天线扫描方式转换为字符形式数据集,作为HMM1的观测序列数据集;将雷达字序列作为HMM2的观测序列数据集。由于战场中所面对的敌方MPAR平台是非协作目标,所以事先无法获取敌方观测序列与隐藏状态的对应关系,需要采用无监督的模型训练方法。因此需要进行数据集划分,按照7∶3的关系将初始数据集划分为训练集和测试集。 3) 状态预测。将模型训练得到的最优参数模型作为状态预测的输入参数,采用Viterbi算法对测试集数据进行状态预测,分别得到HMM1观测序列的估计结果1和HMM2观测序列的估计结果2。 4) 结果融合。首先找出状态预测中Viterbi算法得到的各节点相异状态,将该状态的最大概率值作为该状态的概率赋值。由于各状态概率值会随着观测序列训练长度增加而逐渐变小趋于零,因此在进行D-S证据理论融合之前,还要将各状态的概率分布值进行归一化处理。完成归一化处理之后,采用改进的D-S证据理论完成最后的结果融合,得到最终的识别结果。 按照第1章对MPAR行为转变的内、外因分析,本章的仿真数据集主要从战场环境态势、空间运动状态、天线扫描方式以及表现雷达功能状态的关键要素——雷达字序列着手。由于不同作战环境下战场态势差别很大,对这部分内容进行仿真得出的识别模型不具有很强的泛化性,所以本文主要考虑从另外3个方面构建仿真数据集验证本文所提的基于改进D-S证据理论的雷达行为状态识别方法。 实验场景设定:假设某国的导弹驱逐舰出现在我国某海域,由于战场环境不断变化,驱逐舰上所搭载的MPAR的行为状态也将不断变化,其行为状态的转变规律遵循图2所示的转换机制。 图 2 行为状态转变规律Fig.2 Patterns of functional change 仿真生成MPAR的仿真数据集,一共10条,前7条用作训练数据集,后3条用作测试数据集。其中,距离、速度的数据集长度与雷达字集长度的1/4相等,隐藏行为状态序列包括搜索(Search),捕获(Acquisition,ACQ),非自适应跟踪(Non-Adaptive Track,NAT),距离分辨(Range Resolution,RR)和跟踪保持(Track Maintenance,TM)共5种状态。依据目前公开的加拿大水星多功能雷达工作特性,设定MPAR功能状态与观测序列的对应关系分别如表2和表3所示。 表2 功能状态与观测序列s的对应关系Table 2 Correspondence between functional state and observation sequence s 表3 功能状态与观测序列ω的对应关系Table 3 Correspondence between functional state and observation sequence ω 4.1.1 模型训练得分情况 首先进行算法有效性验证实验。取训练数据集长度为2100,测试集数据长度为900。根据文献[5],将航速介于0~11 kn(1 kn≈1.852 km/h)之间记为低速,介于11~21 kn之间记为中速,超出21 kn记为高速,依次编码为s1,s2,s3;记舰载武器最大射程为dmax,距离介于0~dmax/3编码为s1,距离介于dmax/3~dmax编码为s2,超出dmax编码为s3。进行100次Monte Carlo实验,模型训练的对数概率分值情况如图3和图4所示。 图 3 ω模型训练的对数概率分值情况Fig.3 The log probability score of the ω model training 图 4 s模型训练的对数概率分值情况Fig.4 The log probability score of the s model training 不难看出,相同实验条件下,模型训练100次会多次出现异常值。为了更清晰地观察异常值情况,绘制图3和图4对应的箱线图分别如图5和图6所示。 图 5 ω模型训练的对数概率分值箱线图Fig.5 Box plot of log probability scores for ω model training 图 6 s模型训练的对数概率分值箱线图Fig.6 Box plot of log probability scores for s model training ω模型训练产生了23次异常值(超过均值5%以上的有8个),s模型训练产生18次异常值(超过均值5%以上的有9个),异常值占比较高,会造成后续状态识别结果的不稳定性。因此本文对整体算法再次进行改进,首先增加n次模型训练次数得到不同的训练得分记为scorei(0 4.1.2 训练集长度对识别性能的影响 使用运动状态和天线扫描方式数据集进行行为状态识别的方法记为HMM-s,使用雷达字数据集进行行为状态估计的方法记为HMM-ω,本文所提方法记为Modified-DS,通过对比实验研究训练集长度对3种方法识别性能的影响。为了使仿真实验进一步逼真现实战场情况,设置前期进行雷达字提取时所得雷达字的提取错误率为8%,运动状态提取错误率为2%进行仿真实验,识别结果取30次Monte Carlo实验的平均值,得到不同方法随训练数据集长度变化的识别准确率对比见图7。 图 7 识别准确率随数据集长度的变化Fig.7 Variation of recognition accuracy with dataset length 图7展示的是在100个批次的数据集下,不同方法所得识别率的对比情况。可以发现,在最初数据集容量较小时,3种方法识别效果均较差,这主要是因为在数据量不够的情况下,训练得到的模型参数存在较大误差,进而导致最后的预测效果不佳。当达到15个批次后,各方法的识别准确率将趋于稳定,这对后续的实验设置具有一定的指导意义。这主要是因为随着数据长度不断增加,训练所得模型将逐步逼近于MPAR原始模型,所以识别准确率逐步提升,最后趋于稳定。此外,3种方法在模型训练稳定后均有一定的识别准确率突变点,这是因为设置了雷达字提取误差,导致训练的模型存在一定的不稳定性,造成最后的识别效果略有下降,但是在最差的情况下基于改进D-S证据理论的识别方法仍有95.5%的识别准确率,不影响改进方法的整体性能。 进行高层次的MPAR行为识别的前提是首先完成好较低层次的行为辨识工作,其中最重要的工作之一就是进行雷达字提取。为了验证所提改进算法的鲁棒性,本次实验首先将雷达字提取的准确率设置为100%,之后每次降低0.5%,直到提取准确率为50%。此外,根据图7所展示的实验结果,在15个批次后训练模型将趋于稳定,所以本次实验中训练数据集的大小设置为15个批次,分别进行100次Monte Carlo实验,将平均值作为识别的最终结果,统计HMM-s,HMM-ω和Modified-DS这3种方法的识别准确率如图8所示。 图8 识别准确率随雷达字提取错误率的变化Fig.8 Variation of recognition accuracy with radar word extraction error rate 随着提取雷达字的准确率下降,也就是随着雷达字提取的错误率增大,HMM-ω和Modified-DS这2种方法的识别准确率呈现波浪式下降趋势,HMM-s的识别准确率稳定在89%左右,这是因为HMM-s仅依靠MPAR的空间运动状态和天线扫描方式来进行最后的识别工作,所以基本不受影响。当雷达字提取错误率小于28%时,大多数情况下Modified-DS识别准确率高于另外两种方法。当雷达字提取的准确率小于72%时,虽然Modified-DS识别准确率逐步下降并低于HMM-s方法,但仍高于HMM-ω方法,且在一般情况下,雷达字提取的准确率会维持在80%以上。 根据MPAR的行为规律,首先从战场环境态势、空间运动状态以及天线扫描方式这3个方面分析了影响MPAR的内、外因素,并通过分析决定采用空间运动状态、天线扫描方式这2个信息作为MPAR行为辨识的辅助信息。之后分别将可观测信息和雷达字建立对应的HMM链,最后结合改进的D-S证据理论融合2条单链的估计结果,以此作为最终的识别结果。通过仿真实验证明了算法的有效性,在一定范围内,数据量的增大将使得最后识别准确率逐渐提升,达到一定程度后保持稳定;此外,改进算法的鲁棒性较强,在一定雷达字提取错误率的前提条件下仍有不错的识别效果。但是改进算法也存在不稳定的缺陷,提升算法稳定性将是下一步工作的重点。3 识别算法设计


4 仿真实验和结果分析


4.1 算法有效性验证
4.2 雷达字提取性能对识别效果的影响
5 结束语
