基于整车动力需求的氢燃料电池跟随型能量控制策略研究与优化
2023-01-13郭凤刚
杨 琨, 郭凤刚
(北汽福田汽车股份有限公司, 北京 102206)
目前,氢燃料电池(HFC)受催化反应速率和辅助零部件响应的影响,其功率输出偏“软”[1],需要配合动力电池“削峰减谷”,以满足整车即时功率需求。作为其核心管理的能量控制策略(PMS),对燃料电池和动力电池的寿命均存在重大影响[2-3]。
本文将已交付运营的10.5 m氢燃料电池客车作为研究对象,开发基于整车动力需求规则的跟随型PMS。通过MATLAB/Simulink搭建仿真模型,验证模型准确性,并完成策略效果预测。
1 整车及氢燃料电池电电混合动力系统
1.1 基本情况
采用本文控制策略的整车,最大允许总质量17 t,整备质量14 t,最高设计车速69 km/h;搭载驱动电机额定功率、额定转速、额定转矩分别为110 kW、 900 r/min、1 100 N·m,峰值参数分别为220 kW、 2 700 r/min、2 400 N·m。配备额定功率94 kW、峰值功率115 kW的氢燃料电池和51 kW·h的磷酸铁锂功率型(放电倍率2 C)动力电池。整车高压平台470~700 V,低电压平台9~16 V。车辆行驶工况为城市公交工况,单程43.5 km,共包含14站,平均单趟运行1~1.5 h,每日运营时长约10 h,总运营里程超过300 km。
1.2 电-电混合动力系统及PMS设计要求
1.2.1 电-电混合动力系统
本文HFC客车的“电-电混合动力系统”架构和电气原理如图1所示。

(a) 整车电-电混合动力系统架构图
图1(b)中24 V铅酸电池用来给整车控制器、主散热系统、DC/DC控制器、空压机控制器等供电;12 V铅酸电池主要是为氢燃料电池(FCU)控制系统供电[4]。
排除产品设计失误,HFC寿命性能的主要影响因素包括:启停机绝对次数、输出功率加/降载速率与变载频率、低温冷启动策略及绝对次数、长期服役功率/电压/电流等[5-6],主要是通过影响HFC内部核心零部件或材料的耐久性来影响系统整体寿命。动力电池作为辅助动力源,其寿命的主要影响因素包括:环境/电池温度、过充/过放、电池充放量(吞吐量)等[7]。所有影响HFC和动力电池寿命的参数均可通过混合动力系统的控制算法直接或间接控制,以保证系统满足整车的动力需求并整体处于比较好的健康状态(SOH),同时兼顾整车在全生命周期PLM中的能耗优化。
1.2.2 PMS设计要求
PMS设计首先应确保动力电池SOC在最佳寿命安全窗口,再保证其区间稳定性以控制动力电池吞吐量。动力电池SOC及吞吐量与FCS变载频率、升降载速率和启停机次数均有直接关系。因此,FCS支持变载和启停机工况方面的性能表现直接决定了电-电混合动力系统PMS可优化空间及系统耐久性能表现。高变载工况可以支撑超细分的动力电池SOC查表策略,甚至可以设计基于整车功率需求的模糊控制策略,两者均可表现出优于传统动力电池SOC查表PMS的鲁棒特性[8]。
目前,PMS常用的类型包括基于动力电池SOC的规则型策略和基于整车动力需求及车辆驾驶特征的跟随型策略。本文是在规则型PMS基础上,以整车动力需求为索引并进行间歇性迭代计算,提高燃料电池系统功率输出与车辆需求的吻合程度,降低动力电池动力输出占比,降低其吞吐。
2 基于动力电池SOC规则型PMS
2.1 规则型PMS设计
规则型PMS是指针对不同动力电池SOC区间,由整车控制器(VCU)差异化设置燃料电池目标功率,并保持动力电池SOC维持在某区间的能量控制策略。在车辆运行过程中,FCS始终处于可变功率输出状态。整车控制器(VCU)结合BMS给出的动力电池可允许充放电功率(SOP)和SOC状态,将功率需求(目标功率)发送给燃料电池控制器(FCU),再由FCS完成功率响应。
为保证动力系统寿命,规则型PMS设计时常将动力电池SOC安全窗口设定为40%~80%,燃料电池系统变载时间间隔≥7.25 s,尽量避免非故障启停机,同时将氢燃料电池系统输出功率定在10~80 kW区间,因为输出功率越小,系统效率越高。
本文制定的规则型PMS如图2所示,FCS响应功率点定义为60 kW、35 kW、27 kW、23 kW、18 kW、16 kW、13 kW、10 kW、5 kW,其中细化功率区间[10,35]kW是根据图3中的整车动力需求平均功率来确定的。相应地,动力电池SOC查表索引区间为[20,40]、(40,60]、(60,65]、(65,68]、(68,70]、(70,75]、(75,78]、(78,80]、(80,100]。若车辆处于制动回收或动力电池处于低温等状态时,应同步考虑动力电池SOP。

图2 基于动力电池SOC查表规则PMS

图3 整车平均需求功率曲线
2.2 车辆运营情况及问题
车辆投入运营近半年,单车行驶最高里程35 682 km,全年平均氢耗5.17 kg/100 km。根据云数据平台数据,对其中某辆车全天FCS和动力电池工作数据进行整理和分析,如图4和图5所示。
1) 动力电池。SOC工作范围为53%~73%,满足40%~80%的安全窗口。通过对动力电池实际充/放电(即包含驱动放电及制动回收电等)积分计算,其工作期间吞吐量为425.3 Ah。
动力电池SOC工作范围是指,最大可用电量减掉其安全区间、过放区间和缓冲区间后剩下的可以允许长期工作容量范围;最佳寿命安全容量窗口范围通常为58%~65%[9]。保证动力电池在最佳寿命SOC范围工作是整个能量控制策略中非常重要的部分。动力电池吞吐量一方面可反映出车辆工况特征,另一方面也反映出动力电池的充放倍率。随充放倍率提高,最佳寿命安全窗口也会缩小[10]。鉴于此,缩小动力电池SOC工作范围,并降低其吞吐量是保持动力电池寿命性能的重要手段。从实车运营数据可知,动力电池SOC工作范围和吞吐量存在进一步缩窄及降低的空间。

图4 动力电池实际SOC和FCS输出功率曲线

图5 动力电池吞吐量曲线
2) 氢燃料电池系统。全天总变载次数38次,最小变载时间间隔70 s,平均变载时间间隔979 s;人为切换运营模式导致3次系统启停;20~35 kW区间内功率运行时间占总运行时间的89%,无≥35 kW功率点出现。总体来说,氢燃料电池系统在功率范围和变载频率方面虽然满足设计要求,但FCS长期工作在35 kW以下,可能会造成膜电极长期润湿不足,从而加速其衰减,可考虑采用调高输出功率来优化FCS的健康状态,以更好地平衡双电系统寿命性能。
3 基于整车动力需求的跟随型PMS
将整车实时功率需求作为燃料电池系统目标输出功率的能量控制策略称为跟随型PMS。采用跟随型PMS可对FCS输出功率进行更加准确的预测及纠偏[11],从而解决上述规则型PMS存在的问题。
3.1 跟随型PMS设计
将动力电池SOC/SOP状态、整车动力需求作为FCS输出功率的联合判据,以10 s为时间间隔,对FCS需求功率进行计算后绘制出如图6所示的跟随型PMS示意图。其中整车需求功率P根据车辆实际运行数据计算获得:
式中:ts为开始时间;te为结束时间;U为母线电压;I为母线电流。
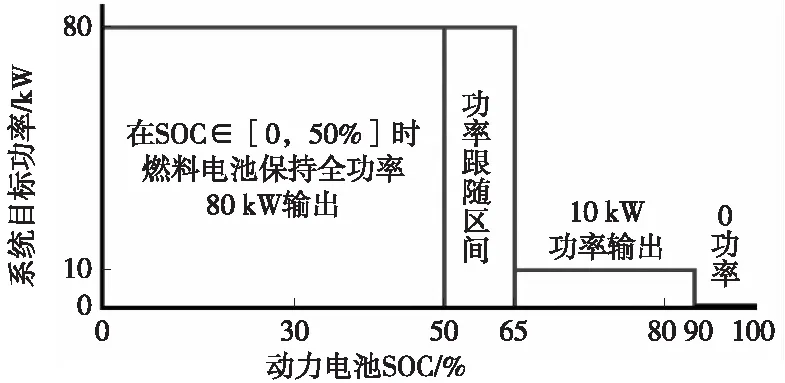
图6 跟随型PMS示意图
在该控制策略中,FCS在动力电池SOC低于50%时以80 kW全功率输出,待动力电池SOC回升至65%后,由VCU恢复对FCS输出功率的跟随控制。具体要求是:当动力电池SOC高于90%时,FCS怠速(零功率)输出;当80%≤动力电池SOC≤90%时,FCS以最小输出功率10 kW输出;当动力电池SOC降到65%时,恢复系统的跟随控制,直到SOC值为50%为止。
3.2 策略仿真与分析
对FCS需求功率及变载需求、动力电池SOC和吞吐总量变化情况进行对比,分析两种能量控制策略各自的优劣势。
3.2.1 PMS仿真模型搭建
利用MATLAB R2018a软件对电-电混合动力系统进行能量流仿真模型搭建[12],在基于动力电池SOC查表规则的PMS模型基础上,增加FCS需求功率跟随控制模块并完成相关仿真模拟计算。在MATLAB/Simulink中以能量流形式建立其仿真模型,实现对策略快速验证和迭代。规则型和跟随型控制策略在控制策略上有明显差异:前者首先通过BMS将动力电池的SOP/SOC作为判断依据输入给VCU,由VCU决定FCS输出功率;后者首先通过VCU将整车功率需求反馈给FCU,再由BMS结合FCS输出功率进行功率的削峰填谷,具体如图7所示,其中①~③表示控制时序。
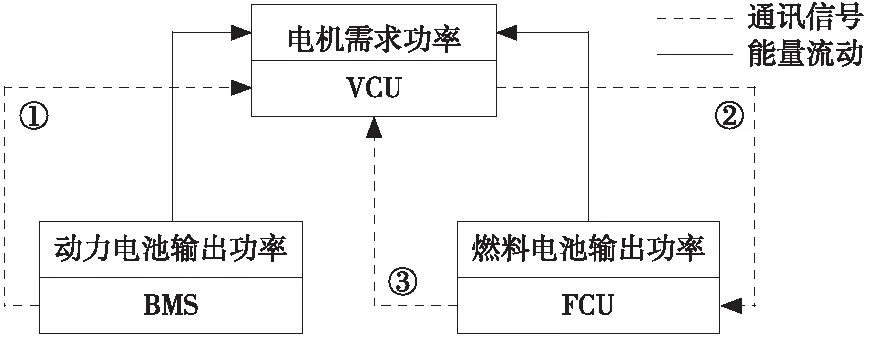
(a) 规则型PMS
在MATLAB/Simulink中建立的仿真模型通过动力电池初始状态模块、整车动力需求模块、氢燃料电池系统需求功率即时判定模块、动力电池吞吐量计算模块组成,以数据总线的形式获取各个子模块的输入量、输出量及系统状态变量,用于各功能模块的计算。
3.2.2 仿真结果及分析
将整车动力需求代入两仿真模型,分别得到基于规则型和跟随型的PMS仿真数据。由于实车只搭载规则型PMS,所以将基于规则型PMS的实际运行数据只用于与其仿真数据的对比。分析如下:
1) 动力电池SOC分析。由图8可知,按规则型策略仿真的动力电池SOC变化区间为52%~74%,与实际运行变化范围54%~74%基本一致,满足动力电池系统40%~80%的SOC范围要求。从仿真结果可知,相比规则型控制策略,跟随型可以实现更稳定的动力电池SOC控制(64.8%~65.3%)。由图9可知,动力电池实际运行吞吐量为425.3 Ah,对比仿真规则型策略,动力电池的吞吐量为410.5 Ah,偏差仅为3.61%,证明仿真模型可较为准确地反映电池实际吞吐情况。将相同工况带入跟随型策略仿真模型,计算出动力电池的总吞吐量为118.4 Ah,降低幅度较大,说明采用跟随型PMS可有效提升动力电池寿命。
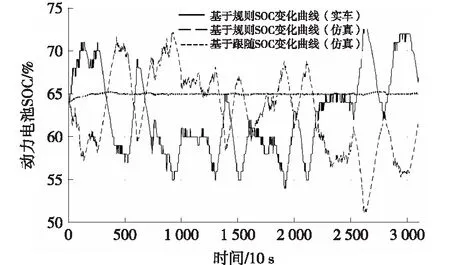
图8 动力电池SOC数据
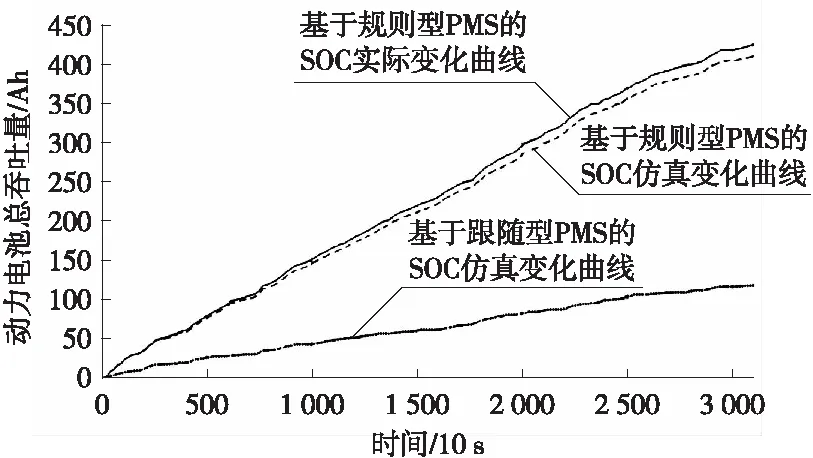
图9 动力电池吞吐量曲线
2) FCS输出功率分析。跟随型策略中由于FCS输出功率与整车功率需求更加接近,其输出功率区间向高功率范围移动,因此功率上限的设定是策略中需要重点设计的内容(主要考虑动力电池SOP、整车动力需求及FCS变载限制等)。
将实车运行、规则型和跟随型PMS下的FCS输出功率数据列入图10,可见基于规则型PMS(含实车运行和仿真)控制下,FCS输出功率集中在23 kW、27 kW和35 kW等几个主要功率点,与实际运营情况接近,而跟随型PMS使FCS呈现频繁变载状态且输出功率在10~80 kW变化。同时,对跟随型FCS输出功率数据分布进行分析,发现30 kW以下功率占比降至53.26%,而30~80 kW占比达到了46.74%。输出功率高于30 kW可有效降低因氢燃料电池系统长时间工作在低功率区间而导致的长期膜干现象[13]。同时,FCS平均变载时间间隔为16.5 s,最短变载时间间隔为10 s,相比规则型PMS的最小变载时间间隔70 s和平均变载时间间隔979 s,跟随型策略大幅提高了FCS变载频率,但均小于氢燃料电池系统允许的最小变载时间周期7.25 s,满足使用要求。
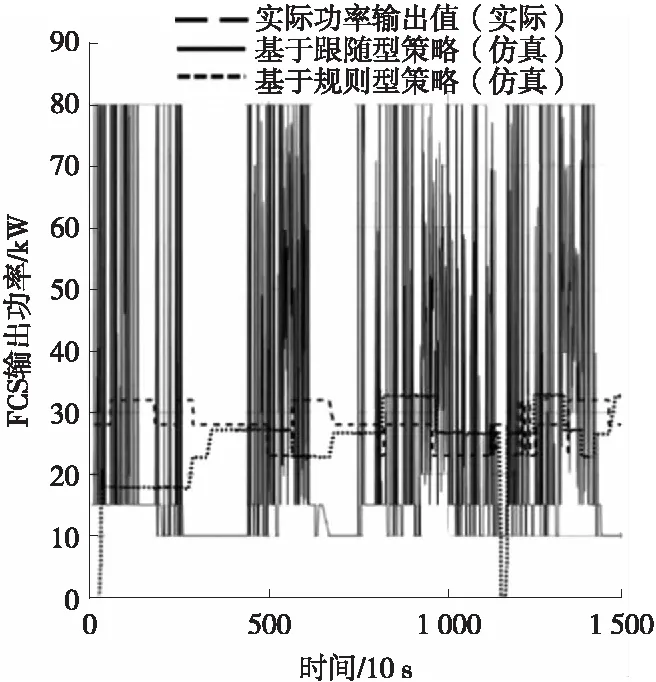
图10 FCS输出功率曲线
4 结束语
本文以交付运营的氢燃料电池客车作为研究对象,对其能量控制策略展开研究,提出基于整车动力需求(跟随型)能量控制策略。根据仿真结果,跟随型能量控制策略可保持动力电池SOC高稳定性,总吞吐量大幅降低,可有效提升动力电池寿命。同时,FCS的输出功率也从中低区间向高区间转移,有效减弱了FCS长时间低功率输出导致的膜干对FCS寿命的影响。因此,基于整车动力需求的跟随型能量控制策略相比传统能量控制策略,可明显提高电-电混合动力系统寿命性能。