一种快递分拣机器人工作站的控制系统设计*
2023-01-09毕思,张冲
毕 思 ,张 冲
(武昌工学院,湖北 武汉 430000)
机器人工作站快递分拣与人工快递分拣有着很大的不同,其工作的完成完全凭借机器人工作站中的示教指令和控制系统中写入的指令,自动化程度很高,几乎不需要人为的参与,不仅能独立完成分拣工作,而且分拣效率高,极大地降低了对人力的需求[1-2]。基于此,为实现对快递的高效、快速分拣,课题组设计了一款快递分拣控制系统,主要介绍了该控制系统的软件与硬件组成、功能以及控制系统的整体调试[3]。
1 控制系统设计
1.1 控制系统工作原理
分拣的快递分为小件、中件和大件三种。该控制系统设计的工作原理:传送带起始处扫描到快递后立即开始运作,并在经过传送带1/3长度的地方时,到达第一个筛选口,长度或宽度小于20 cm的快递将掉落至小件专用传送带上;经过传送带2/3长度的地方时,到达第二个筛选口,长度或宽度为20 cm~35 cm的快递将掉落至中件专用传送带上;在到达传送带终点时,长度或宽度大于35 cm的大件快递将运输至存放大件快递的容器内;当传送带末端的传感器检测到快递的10 s后,传送带停止工作[4-5]。三种快递的容器依次按传送带的三等分长度摆放,并按照小、中、大的顺序依次摆放。
1.2 控制系统设计
在传送带起始处,传感器检测到快递后传送带开始工作,将从传送带上的快递运输至传送带末端,在传送带末端的传感器检测到快递后,传送带停止工作。
分拣程序流程图,如图1所示。开始分拣作业后,货架上的传感器开始检测货架上是否存在货物,若某点位上存在货物,则不进行搬运;若不存在货物,则执行快递搬运命令,执行机器人工作站快递搬运示教命令。但实际的程序编程逻辑与该流程逻辑有所不同,程序编程中的逻辑是在开始分拣快递工作后直接给予工作站快递分拣信号,在检测到某点位上存在货物时,将原本执行的该点位搬运指令置位不执行;而在该流程逻辑中,传感器先检测是否有货物存在于点位上,再决定是否执行分拣命令,在执行顺序上与程序编程逻辑存在些许差距[6-9]。
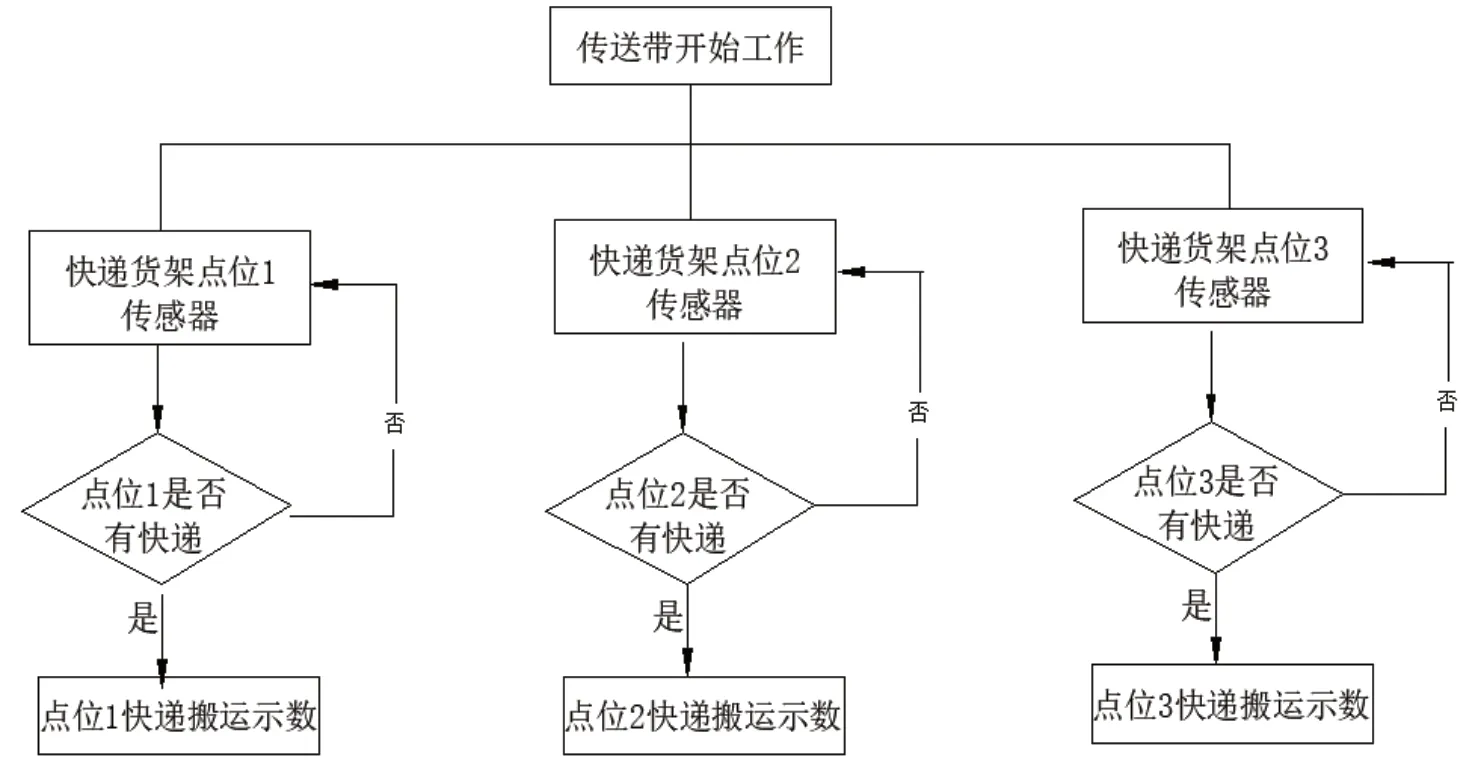
图1 分拣程序流程图
1.3 控制系统硬件选型
1.3.1 PLC控制器选型
PLC控制器:西门子SIMATIC S7-1200、CPU 1214C DC/DC/DC(订货号:6ES7-214-1AG40-0XB0)。
西门子SIMATIC S7-1200是一款紧凑型、模块化的PLC控制器[10]。其使用灵活,易于设计及实施,可以用于控制各类型设备,满足不同的自动化需求,并出色地完成各种高度精确的自动化任务,同时还具备支持小型运动控制系统、过程控制系统的高级应用功能。
1.3.2 机器人本体选型
机器人工作站:ABB机器人IRB 1410型机床上下料机器人。
IRB 1410型机床上下料机器人以其坚固可靠的结构而著称,同时具有噪声水平低、例行维护间隔时间长、使用寿命长等优势。该机器人工作范围大、到达距离长(最长为1.44 m),承重能力为5 kg,上臂可承受18 kg的附加载荷。机器人本体坚固,配备快速精确的IRC5控制器,可有效缩短工作周期,提高生产率。
1.3.3 编码器选型
2500线编码器分辨率可达10 000 P/R,最高转速可达3 000 r/min。输出转矩大,速度在1 000 r/min以下为恒转矩输出。57步进电机发热小、振动噪声小。高速停止时可以做到平稳快速,无零速振荡时可以做到运行平稳,且响应速度快,适合频繁启停的场合。
1.3.4 光电传感器选型
光电传感器:E3F1-DS8P1传感器。
光电传感器是通过把光强度的变化转换成电信号的变化从而实现控制效果的。一般情况下,由发送器、接收器和检测电路三部分构成。课题组根据需要选择了E3F1-DS8P1型光电传感器。传送带电机为三相步进电机,其特征参数有:电机功率为1.1 kW;电压为380 V;转速为2 800 r/min,且价格相对便宜。此外,还包括小型、中型、大型快递摆放货架各1个。
1.4 控制系统程序设计
根据控制系统的控制要求以及控制流程图,完成机器人末端的I/O通信和地址分配,如表1所示;外部控制按钮与传感器I/O信号分配,如表2所示。

表1 PLC与机器人I/O地址分配表
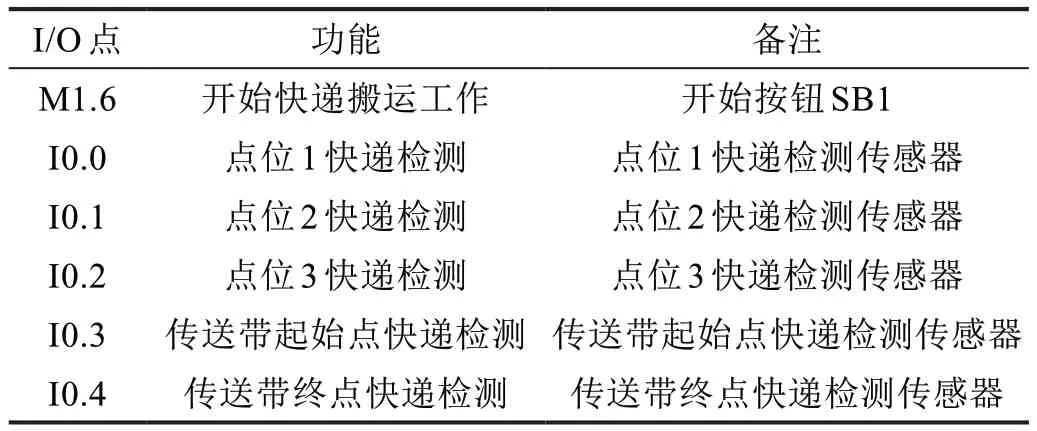
表2 外部按钮与传感器I/O信号分配表
小、中、大三种快递搬运程序类似,以小件快递为例,快递搬运程序段1(小件货物开始搬运)的程序设计,如图2所示。即常开触点M1.6接通信号后,经过常闭触点M0.3后给M0.3常闭触点置位信号,使常闭触点M0.3保持断开状态,常开触点M1.6无法再给信号到后续程序,常开触点Q0.0(小件货物点位1搬运)、Q0.1(小件货物点位2搬运)、Q0.2(小件货物点位3搬运)收到置位信号。
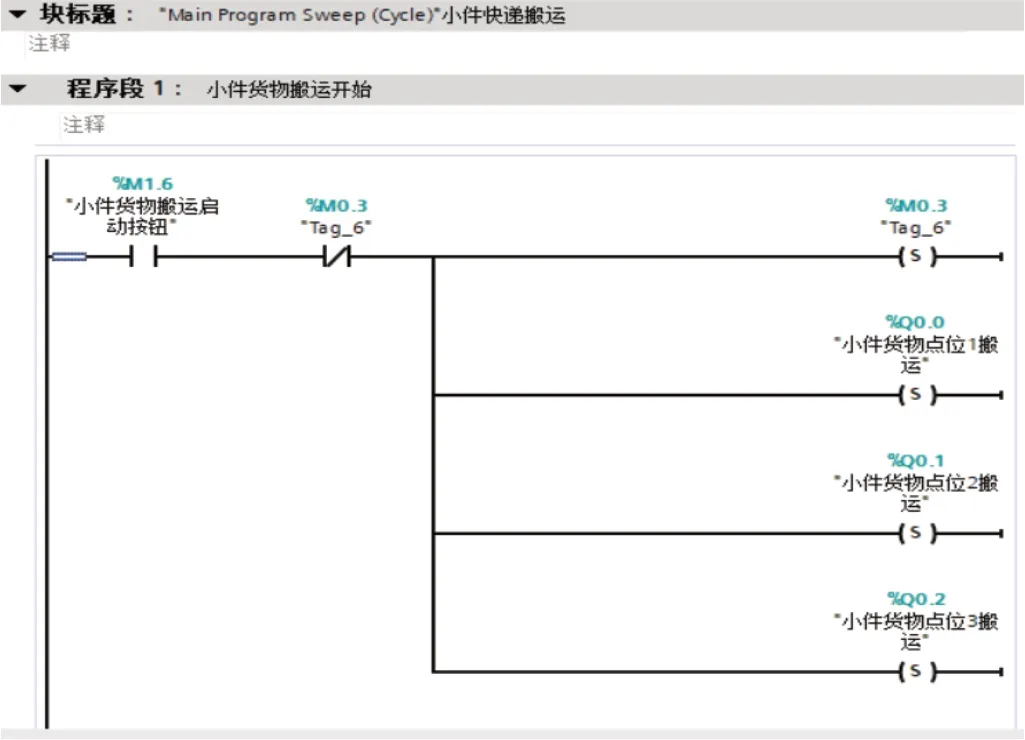
图2 快递搬运程序段1(小件货物开始搬运)程序设计图
程序段2-3(小件快递点位1传感器)的程序设计,如图3所示。程序段2-3代表了光电传感器检测到物体后,无法再继续分拣快递至点位1,于是就给予程序一个启动信号(M0.1传感器检测到物体信号),常闭触点M0.0与常闭触点M0.0复位指令形成了一个使传感器不能再左右程序的功能,并给予常开触点M0.2信号,继续执行程序段3,信号经过常开触点I0.0并执行常开触点Q0.0(小件货物点位1搬运)复位指令,使程序段不执行小件快递点位1的搬运指令。
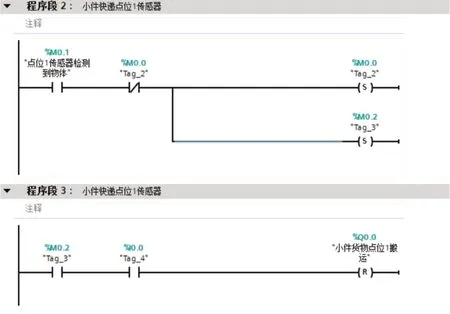
图3 程序段2-3(小件快递点位1传感器)程序设计图
1.5 控制系统调试
利用博途V14调试并检测控制系统PLC程序是否出错,进行仿真实验。鼠标右键点击“小件货物搬运启动按钮”,将信号修改为1,即模拟开始搬运快递,程序正常运作。启动按钮,点位1、2开始货物搬运,如图4所示。
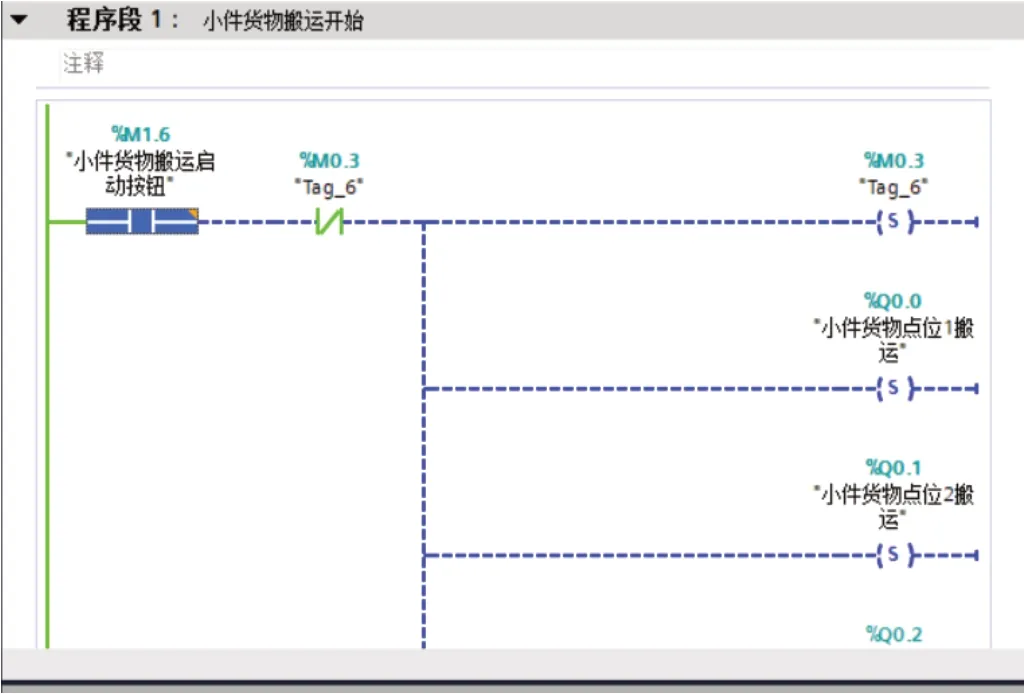
图4 源程序调试图
2 结语
课题组设计的快递分拣工作站的控制系统结合了工业机器人码垛技术、光电传感器检测技术、PLC控制技术等内容,以西门子PLC作为控制器,以工业机器人的码垛编程作为动作指令,光电传感器作为指令判断,将三者结合,高效地完成了快递分拣的工作。该工作站控制系统程序简单,只需要稍加修改就能完成其他类型物品的搬运,具有很强的适应性,可以很好地完成各种不同尺寸货物的分拣工作。
