一种基于运动平台的单站无源定位算法研究与应用
2023-01-09马若飞李辰梓
马若飞 李辰梓 王 超
(西安电子工程研究所 西安 710100)
0 引言
随着电子技术的不断发展,在现代战争中,电子对抗的作用已经越来越重要。无源侦察功能作为电子对抗重要的功能领域,在工作过程中不需要向探测目标发射侦察信号,从而实现了整个工作过程中的电子隐蔽效果,并且由于无源截获的电磁波信号单向传播特点,使得无源侦察的探测距离相对较远,可以较好的保护自身及己方目标,降低被敌方先期发现和跟踪的概率[1-3]。单站无源定位技术作为无源侦察领域的重要应用方向,在空间电磁频谱获取与电磁态势生成中发挥着关键的作用。基于运动平台的无源定位系统,能够自主地控制自身运动平台的运动方式和运动航迹,使得其信号建模与定位估计算法相对简单清晰,并且可以在整个工作过程中,获取到更优的观测条件,得到更好的观测数据[4]。在威胁辐射源信号的截获参数中,来波方向(DOA)的截获计算容易实现,并且该参数来源于威胁辐射源的位置与无源侦察系统的位置之间的空间关系,所以不容易在整个观测过程中发生捷变,使得参数测量结果可靠性和可信度较高,因此基于来波方向测量的单站定位技术具有重要的意义[5-6]。基于以上阐述,本文采用基于运动平台的威胁辐射源到达角度交叉技术进行信号模型与算法原理的分析,并且进行了模型仿真与外场试验验证工作。
1 信号模型与算法原理
基于运动平台载荷的威胁辐射源角度交叉定位算法的信号模型如图 1所示,图中点T(Target)表示需要进行无源定位的雷达辐射源在平面中的坐标点,点S(Start)是运动载荷进行角度交叉定位时运行航迹上的起始点,点E(End)是运动载荷进行角度交叉定位时需要实时计算并输出定位值的定位点,为了方便进行三角关系的数学运算,一般工程实践中,运行航迹选择直线匀速运动,即运动载荷从点S开始沿着直线SE以速度V匀速运动,在时刻t到达当前定位点E,此时上述平面中的三个点,形成三角关系图。在该三角关系中,直线TE的长度即为算法最终需要求解的威胁辐射源的距离信息。
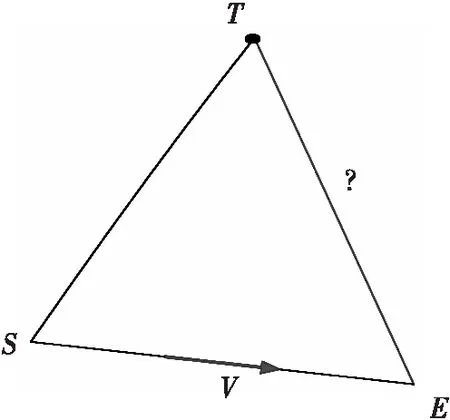
图1 运动平台角度交叉定位信号模型图

(1)
公式(1)表示三角数学关系中的正弦定理,将其运用在图 1所示的信号模型中,正弦定理应用为公式(2)和公式(3)所示的三角关系,要想求解TE的长度DTE,就需要获得运行航迹中从起始点到定位点之间运行的长度DSE,起始点和定位点分别与威胁辐射源之间连线的夹角φT,以及起始点与运行航迹之间的夹角φS。
(2)
(3)
在实际的应用过程中,需要依据无源侦察设备采集威胁目标的到达角度(DOA),惯导设备实时输出当前设备的经纬度和航向角等参数,计算距离估计值。根据上述参数形成的三角关系如图2所示,其中DTE为需要求解的当前距离值,DSE为航迹SE的距离长度值,α为威胁辐射源在起始点S被测量的北向角φα,β为威胁辐射源在定点E被测量的的北向角φβ,θ为航迹SE的航向角度φθ,α′为α相对于北向坐标轴的内错角,β′为(360-β)相对于北向坐标轴的内错角。

图2 北向坐标下可观测参数三角关系图示
下面根据以上一些测量或者计算参数值,获得当前求解距离值为
φT=α′+β′=(α)+(360-β)=α-β
(4)
φS=θ-α
(5)
(6)
2 仿真分析
按照上文中推理出来的威胁目标当前距离估计值(公式6),在Matlab中进行仿真,仿真条件如下:
1)起始定位点时,威胁目标与运动载荷平台相距固定的距离,并且起始定位点在运动载荷平台行进方向的起始角度差φT为从0°开始。
2)工程设计中,角度误差是无法消除的,然而角度误差对定位算法会有影响,所以按照业界能够实现的干涉仪无源测角误差量,暂定仿真的角度误差值为±2°以内的随机值。
3)载荷平台沿着直线匀速运动,将角度差φT从0°运行到180°,用于仿真在运动航迹上能够测到的所有威胁辐射源可能存在的角度位置。
仿真结果如图3和图4所示,图中的X轴 “偏差角度”是指起始定位点与目标之间的连线,与当前定位点与目标之间的连线,所组成的角度值,即前面公式中的φT;图中的Y轴的“误差比”是指在相同的测角噪声条件下,定位目标的距离估计值与目标真实的距离值之差,与目标真实的距离值之间的比值,该值越小,表明定位目标的估计值越准确。
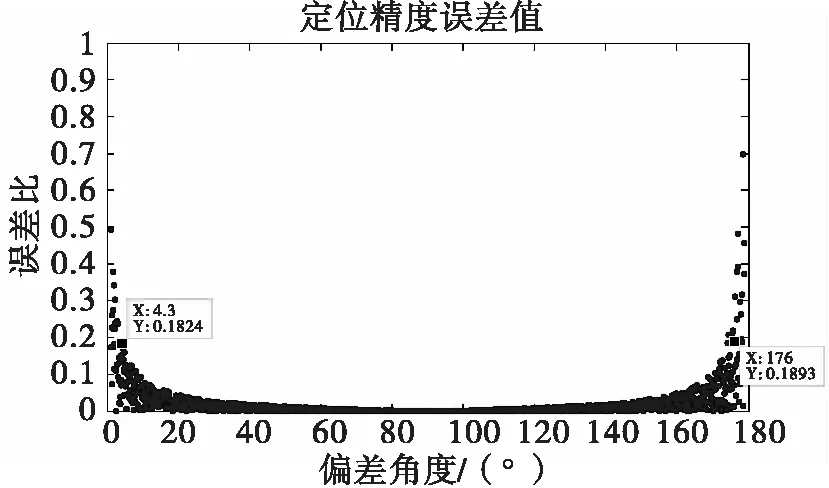
图3 定位精度误差统计图(完整角度区间)
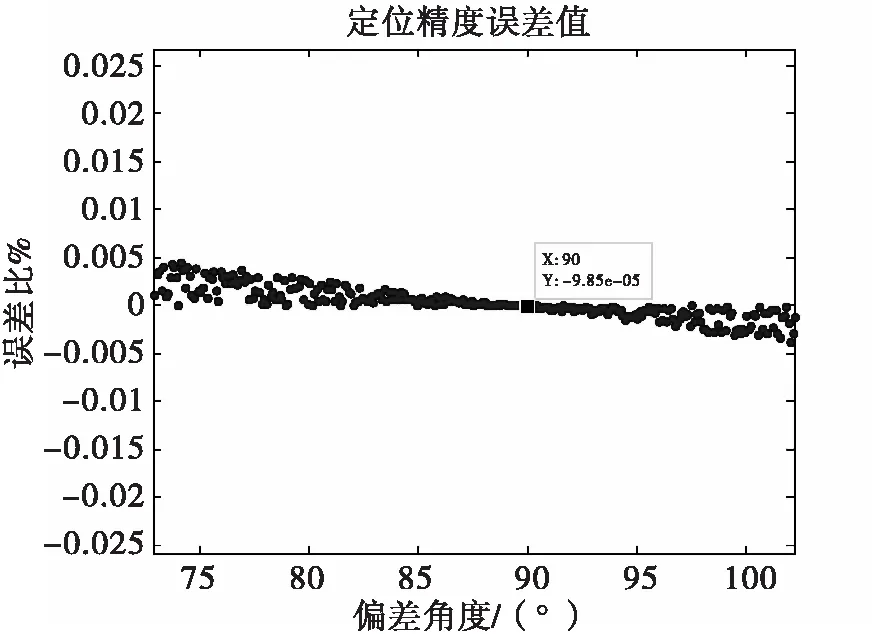
图4 定位精度误差统计图(中心角度区间)
从图3中可以分析得到,想要得到特定要求的定位精度(如要求定位精度小于N%),偏差角度φT需要满足一定的要求,即大于固定偏差φdiff或者小于(180-φdiff)。实际应用中,当在运行航迹上选择了定位起始点之后,需要沿着预设的运行航迹继续运行,相应的定位精度会随着偏差角度φT的增大而收敛,直到满足需要的定位精度要求。
从图 4中可以分析得到,定位误差最小的角度偏差区间在φT等于90°附近,所以在实际应用中,最理想的定位航迹点在φT等于90°的时候。
3 实验验证
通过将上文中分析的Matlab仿真算法,工程应用到某无源侦察载荷中,利用该载荷截获的威胁辐射源的到达角(DOA)和运动平台在试验场地中的运动航迹,来测试验证该定位算法的工程可行性和指标有效性。
实验场景如图5所示,威胁辐射源布设在距离实验场景中的运行公路外约2.5km远的固定点,无源侦察载荷沿着运行公路运动约1.5km,用来模拟实际的运动航迹。无源侦察载荷在运动过程中,实时计算威胁辐射源的到达角(DOA),并且综合无源侦察载荷中惯导设备实时输出的经纬度信息和航向角信息,按照仿真算法要求,实时计算获得当前定位点与威胁辐射源所在固定点之间距离的估计值。在对比统计测距精度时,首先采集威胁辐射源所在固定点的经纬度信息,然后与无源侦察载荷运动过程中定位点的经纬度信息进行计算,获得无源侦察载荷在运动过程中真实的距离值。将运动过程中实时估计的距离值与真实的距离值进行比对统计,可以分析整个运动过程中定位测距估计值的有效性。
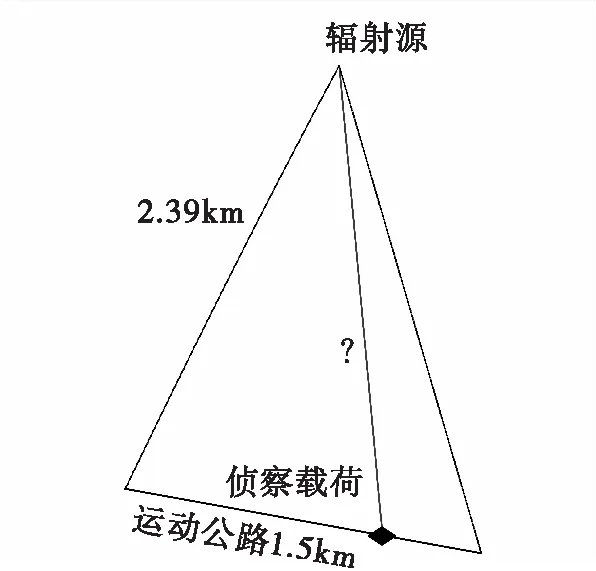
图5 实验场景图
因为实验场地受限,运行公路无法提供足够长的运行距离,所以满足不了仿真分析时最佳的角度偏差区间(φT等于90°附近),无法测试验证最优的测试结果。但是在该实验场景下,已经能够获得满足系统测试要求的测距精度。
由于该无源侦察载荷是宽带接收体制(2G~40G的工作频段),所以试验中选择S波段、X波段、Ka波段等三种典型频段中的试验信号,分别测试验证该算法的普适性。详细的试验数据如图6、图7、图8、图9、图10、图11所示。由于该定位算法中,截获的威胁辐射源的到达角(DOA)是个关键参数,所以在统计分析实验数据时,需要着重考虑该参数。三个波段的测角误差图和测距一次点误差值图中,都存在测角误差图中的有效数据时长比测距一次点误差值图中的有效数据时长要长的情况,是因为测角数据是从无源侦察载荷开始正常工作就实时截获生成的有效数据,而要获得有效的定位数据,需要形成一定的偏差角度φT,所以生成有效定位数据的起始时间比生成有效测角数据的起始时间要晚。
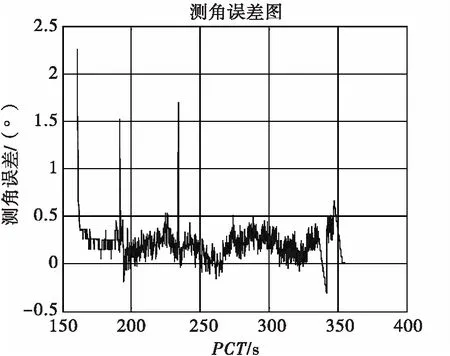
图6 S波段信号的测角误差值图
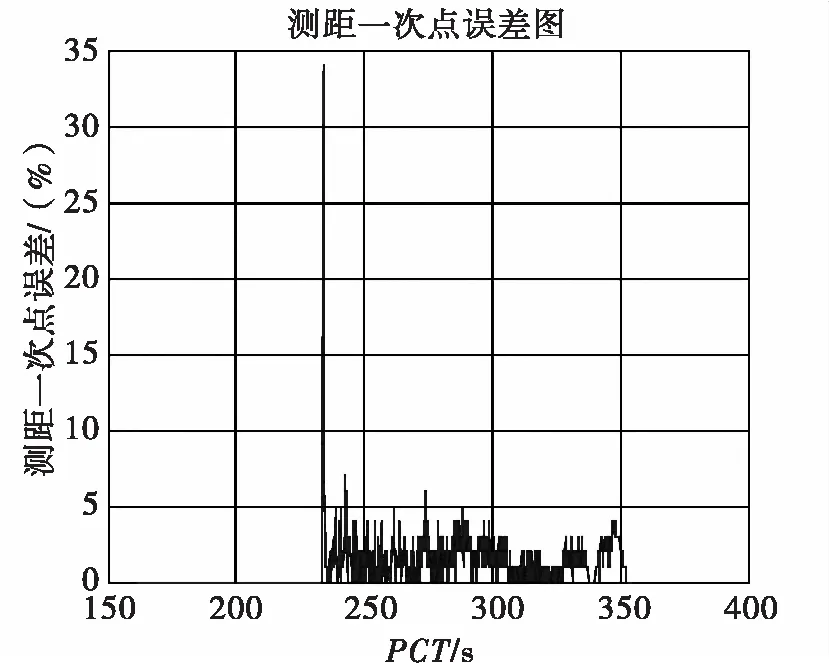
图7 S波段信号的测距一次点误差值图
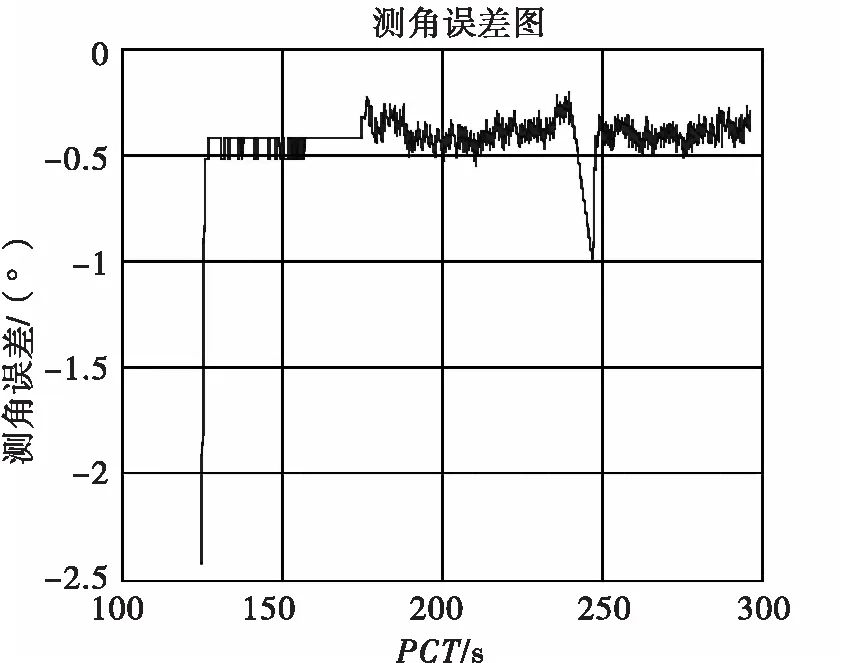
图8 X波段信号的测角误差值图

图9 X波段信号的测距一次点误差值图
图10 Ka波段信号的测角误差值图
图11 Ka波段信号的测距一次点误差值图
通过对以上试验数据进行统计分析,形成如表1所示的试验数据统计表,通过该统计数据可知,当运动平台沿着航迹运动时,只要测角精度满足一定的指标要求,通过该定位算法,估计的威胁辐射源的位置信息(距离)就会得到较好的精度指标。
表1 试验数据统计表
4 结束语
本文通过对基于运动载荷的雷达辐射源角度交叉定位算法进行信号建模,分析信号模型中相关参数之间的拓扑结构关系,运用三角数学关系中的正弦定理,得到求解获得当前距离值DTE需要的关键参数及其对应的数据来源,并分析推导了求解当前距离值的估计算法。利用算法公式在Matlab中进行了仿真,根据仿真结果形成了指导工程应用的算法准则和设计约束。最终将该估计算法工程应用到某运动平台的无源侦察载荷中,通过在布置好的外场试验场景中,选择S波段、X波段、8mm段等三种典型频段中的试验信号,分别测试验证该算法的普适性。通过对试验数据进行统计分析,当运动平台沿着航迹移动预定的距离之后,只要测角精度满足一定的指标要求,通过该定位算法,估计的威胁辐射源的位置信息(距离)就会得到较好的精度指标。