针对阀门黏滞特性的多阈值 Knocker 控制算法研究
2023-01-08邓林志黄佳兴吴德意陈元健
邓林志,孙 晓,黄 靖, ,黄佳兴,吴德意,陈元健
(1.湖南工业大学 机械工程学院,湖南 株洲 412007;2.株洲南方阀门股份有限公司,湖南 株洲 412007)
1 研究背景
阀门在化工、冶金、电力和制药等行业有重要的作用,现代过程控制对阀门的控制精度、寿命提出了较高要求,控制阀作为工业环境中重要的能动控制部件,常出现滞后、黏滞、泄露等问题,这些问题导致了控制系统的振荡,因此减轻阀门的非线性故障引起的控制问题具有重要的研究意义。
为提高调节阀的控制精度与速度,大量研究人员参与了研究,主要是针对调节阀定位器与控制算法进行研究。对阀门控制主要围绕PID 控制的各种线性控制,如Fuzzy-PID[1]、Expert-PID[2]、灰色预测模糊PID[3]等,但这些控制算法大多数没有充分考虑阀门启闭瞬间的非线性特征。
调节阀的黏滞特性是一种常见的非线性特征,一般是因为阀杆和填料密封过紧、介质颗粒的影响等引起摩擦力增大所致。这种非线性特征进而会引起过程变量振荡,最终导致阀门执行机构寿命缩短、生产效率降低。描述这种摩擦力的建模方法有机理建模和数据驱动建模[4],其中机理建模需要准确的模型参数,难以获得;而数据驱动建模工作量较小、计算量较少,所以得到了广泛应用。在后者的发展中,Riccardo 在He 模型的基础上引入了平滑静摩擦模型[5],且基于He 模型搭建了He 模型的逆模型[6];Ding J.等[7]利用多个非线性函数进行建模;Chen S.L.等[8]将阀门状态扩展到4 种状态,更能反映阀门的真实黏滞特征;张浩[9]、陈鹏[10]等基于Chen S.L.的二叉树模型[8]进行了分析与改进。
众所周知,当传统的PID 控制器在阀门控制回路中实施时,因为阀门黏滞特性的影响易导致过程变量的持续震荡,减轻这样的负面影响主要有两种方法,即设计非线性控制器和在控制器输出上叠加额外的补偿信号。目前叠加Knocker 补偿器[11]是一种比较有效的方法,该方法可以降低阀门发生黏滑运动时的振荡周期和幅值,但一定程度上增加了阀杆的磨损。在此基础上,付川等[12]增设了一个阈值来限制Knocker 补偿器的施加条件,减少了阀杆的磨损;朱亚平等[13]对Knocker 补偿器的幅值进行了自整定改进,有效减少了控制回路震荡。文献[14]提出了开环两步法,但其需要对阀门达到目标位置时的控制器输出进行估计,整个过程需三步开环阶跃响应,实现时间较长;文献[15]通过在标准PID 控制器上加入改进的两步补偿器,提高反应速度的同时也消除了振荡,然而这种基于两步法的方法需要对黏滞程度和目标稳态位置等进行估计的额外要求。
本文基于黏滞阀门在运动过程中表现出的特性,建立了较为完善的二叉树改进模型,并针对黏滞特性导致的控制回路输出呈现振荡的问题,建立了改进的多阈值Knocker 补偿器与樽海鞘群算法相结合的补偿控制方案,以期获得更好的控制效果。
2 黏滞模型
阀门执行机构的位移转换环节中常出现黏滞特征,黏滞现象通常用真实阀门位置与控制器输出之间的相位图表示,如图1 所示。其中fs为静摩擦力,fd为动摩擦力,图中的黏滞跳变为死区和移动区之间转换的一个瞬态过程。
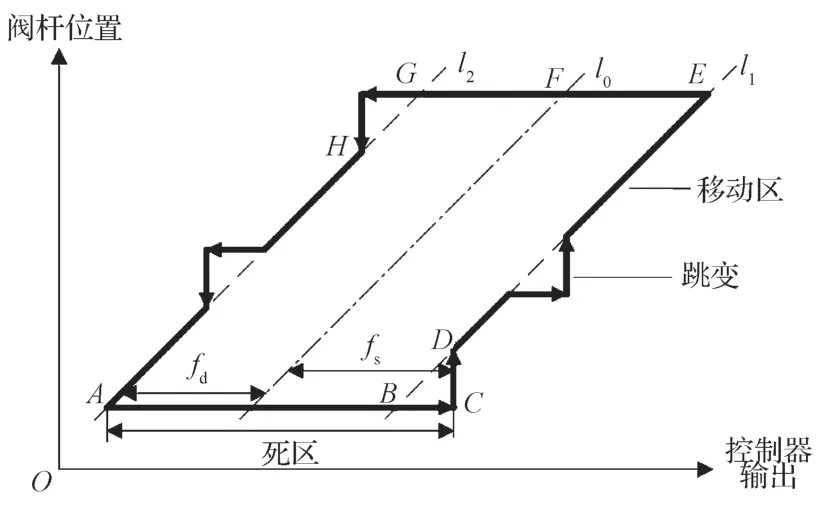
图1 控制阀的输入输出特性Fig.1 Input and output characteristics of control valves
如图1 所示,正常无死区和黏滞的阀门输入输出曲线趋向为线l0,带有黏滞特征的阀杆位置变化过程如下:阀杆从起始位置O点开始,随着控制器输出量增加到达C点,此时输入累计量刚好超过静摩擦力的大小,阀杆开始滑动且静摩擦力切换为动摩擦力,而静摩擦力往往大于动摩擦力,此前静摩擦力积蓄的势能导致阀杆位置产生从C点到D点的跳变,D点之后阀杆受力平衡,因此阀门输入输出保持线性在DE上移动,当阀门输入不再增加时到达静止点E,此时阀杆状态再次回到被静摩擦力阻碍的初始状态,阀杆完成一个带有黏滞特性的位置变换,反向过程即路线EGHA运动状态与上述过程同理。
黏滞阀门的数据驱动建模中被广泛使用的模型有Li 模型、Kano 模型、二叉树模型。本文的黏滞模型在二叉树模型的基础上扩展对黏滞特征进行描述,为了更真实地反应黏滞阀门运动状态,在二叉树模型的基础上加入考虑:1)阀杆前一时刻为滑动且滑动摩擦力为0 的条件下,滑动方向发生改变时会无条件转换成停滞状态,这是不合理的,真实情况是当阀杆上的合力大于静摩擦力时,阀杆依旧保持滑动状态[9];2)阀杆所受的摩擦力大小可能受正反行程的变化而变化;3)当前一时刻阀杆处于滑动状态,而此时刻的阀门输入变化小于某个阈值时,阀门也会由滑动状态转变为停滞状态。结合以上分析的黏滞二叉树模型流程如图2。图中k为现在时刻,k-1 为上一时刻;设Sv=1 时为停滞状态,Sv=0 时为滑动状态;ucum(k)为控制器输出的累加量,u(k)为控制器输入量;d(k)为滑动方向;y(k)为阀门输出位置。
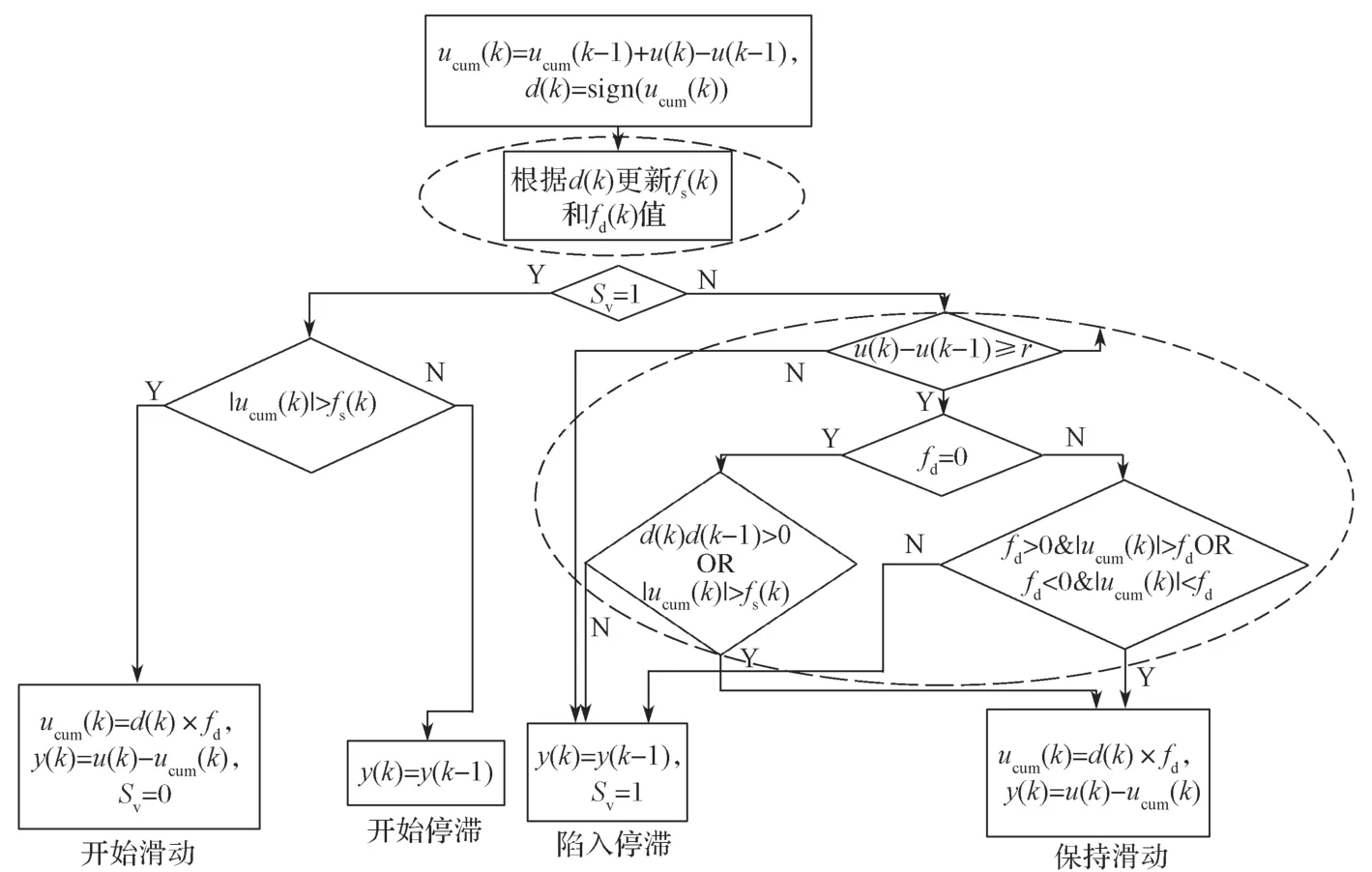
图2 改进的黏滞二叉树模型Fig.2 Improved sticky binary tree model
为描述黏滞特性对控制过程的影响,构建带有黏滞特性阀门为控制对象的简单闭环控制回路,如图3所示。图中yr为控制系统的设定值;χ为阀杆位置输出;y为过程输出;U为控制器输出;r为干扰。
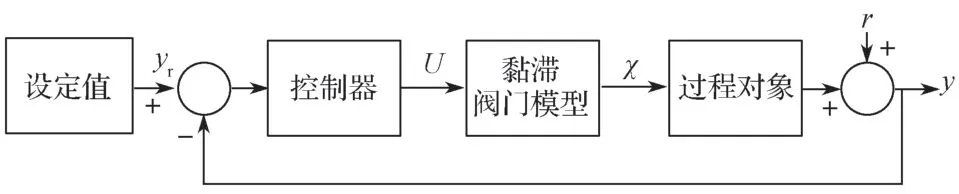
图3 存在黏滞特性的控制阀控制回路Fig.3 Control circuit of control valves with viscous characteristics
阀门的运动阶段如下:1)当控制误差较大时,控制器输出值也较大,足以克服静摩擦力作用,阀杆位置随着控制器的输出同向变化;2)随着误差的减小,控制器的输出变化率降低,当变化率很小甚至为0 时,或者阀门位置误差反向且控制器输出不足以克服反向摩擦力时,阀门会陷入黏滞状态;3)过程输出接近设定点时因为PID 控制器中积分器的作用,控制器的输出信号会以较小的变化率变化,当控制器输出变化到足以克服静摩擦力作用时,阀门位置又会产生跳变,过大的跳变导致控制误差反向,此时阀门容易重新陷入停滞状态。如此反复将会导致控制输出和控制对象的过程输出在稳态工作区域附近出现极限循环。根据如图3 所示的控制系统,设置黏滞参数fs-fd=3,得到的控制效果如图4 所示。
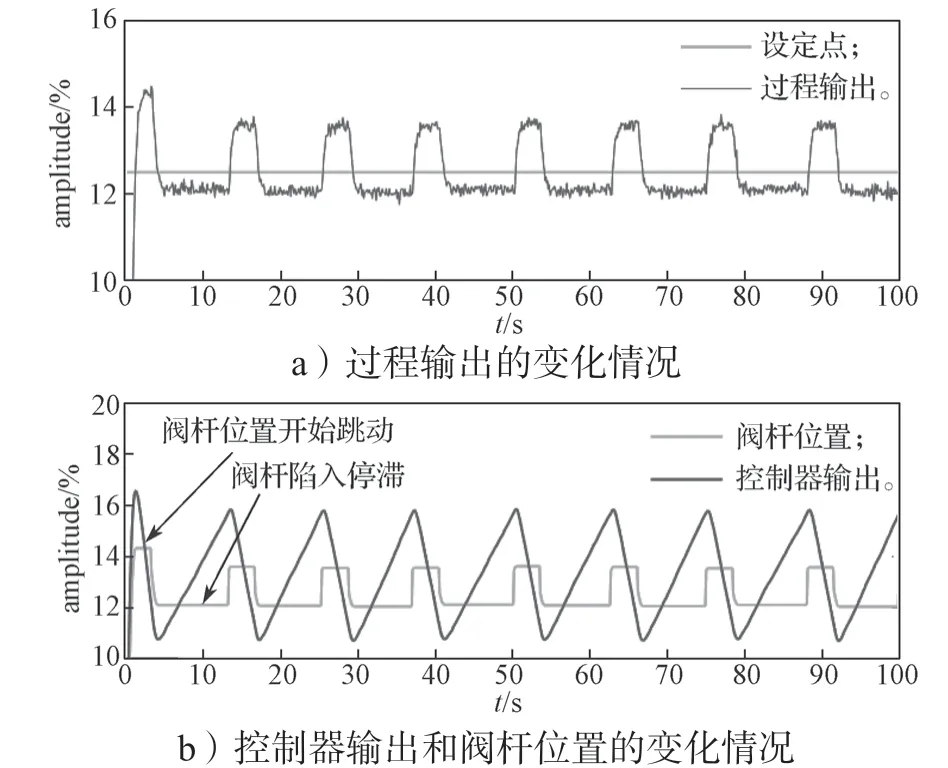
图4 有黏滞特性的闭环回路控制效果图Fig.4 Closed loop control effect with viscous characteristics
3 系统补偿与控制策略
3.1 改进的Knocker 补偿
阀门黏滞的补偿措施有两种,即使用非线性控制器和控制器后添加补偿信号,本文基于第二种方法进行研究。目前Knocker 补偿法是一种简单有效的方式,即当控制器输出发生变化时,将一设定好周期hk、幅值a、脉冲宽度τ的脉冲信号增加到控制器的输出信号中以克服摩擦力的影响,Knocker 补偿效果的优劣与脉冲信号的设定参数hk、a、τ有关,这些参数取值不宜过大或过小,否则振荡效应会更加严重,其补偿原理如图5 所示。图中Uc表示控制器的输出,Uk表示补偿信号的输出,加入补偿后的总控制信号为U=Uc+Uk。
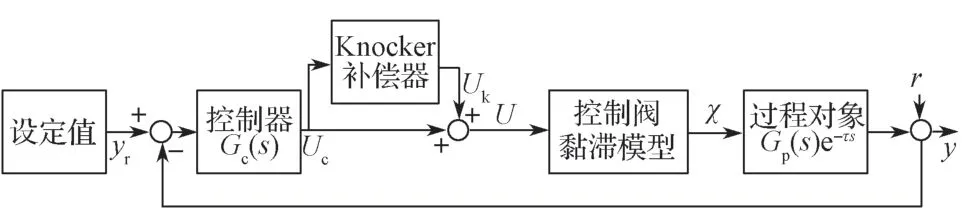
图5 Knocker 补偿原理图Fig.5 Knocker compensation schematic diagram
实际工业环境中,当阀门执行机构因行程方向的不同而产生了黏滞程度变化时,使用原Knocker 补偿方法难以满足稳定性要求,因此修改原补偿信号为如下双参数模式[10]:
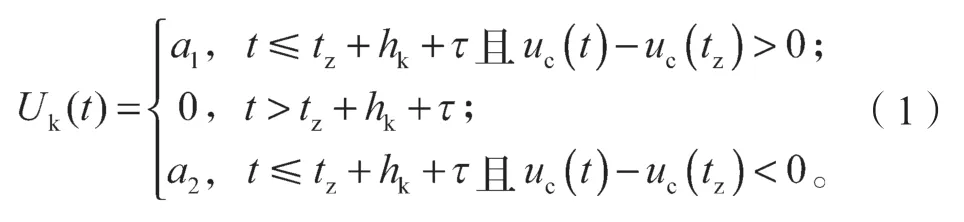
式中:tz为上一周期信号开始的时间点;hk为脉冲周期;a1和a2分别为幅值正反行程的脉冲幅值;τ为脉冲宽度。
在控制器输出方向上叠加原Knocker 信号,可以显著降低振幅和振荡周期,但也造成了阀杆的频繁动作,导致阀杆磨损。考虑在满足工业要求条件下设计一种改进的Knocker 补偿策略,满足误差要求的同时减少或者消除系统振荡。
一般在加入补偿器一段时间后,绝对误差会逐渐减少,在设定点不变且无其他干扰条件下达最小值时,可以去除Knocker 补偿器甚至控制器,而在不满足最小值要求时又可以重新激活补偿控制作用。因此提出3 个问题:1)如何检测到这种状态?2)如何适当增加进入这种状态的可能性?3)当控制器输出停止时,阀杆位置是否保持在理想位置?
为解决上述3 个问题,在控制过程中提出了对应的3 步控制策略:1)就如何检测到是否达到较小绝对误差条件,可用滤波后的误差导数和误差绝对值来鉴定,如果滤波误差的导数在多个脉冲补偿周期Tp时间段内的平均值小于一个阈值r2,且此时的绝对误差也小于一个阈值δ时,应停止PID 控制,保持控制器输出值恒定;2)在Knocker 补偿器启动上设置停用条件,当为真时Uk(t)=0,这是为了在误差接近能达到的最小值时更容易进入停滞状态,即1)中的判定状态;3)当控制器停止输出后,判断此时的输出值是否满足误差最小值要求,同时为了防止噪声导致脉冲无必要的重启,设置条件,条件真时保持状态,否则重新启动PID 和Knocker 补偿器,为了提高阀杆重新启动的速度,此处的Knocker 补偿器无上一步设置的阈值,综上,改进的Knocker 补偿控制策略流程见图6。
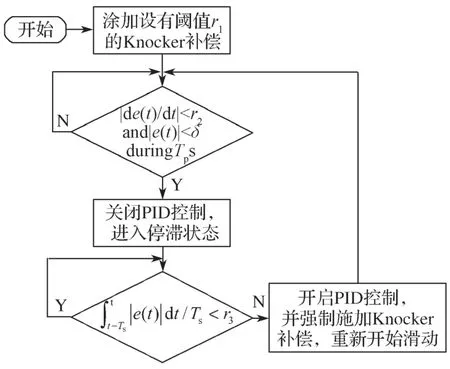
图6 控制转换流程图Fig.6 Control conversion process
3.2 Smith 预估器设计
为补偿控制系统中滞后部分,在反馈中加入一种Smith 环节,使得新的反馈信号中的滞后环节转移到闭环回路之外,保证控制系统的闭环稳定性,加入Smith 预估器后的完整控制系统如图7 所示,为了方便计算,将控制器、Knocker 补偿器和黏滞阀门非线性部分的传递函数等效为
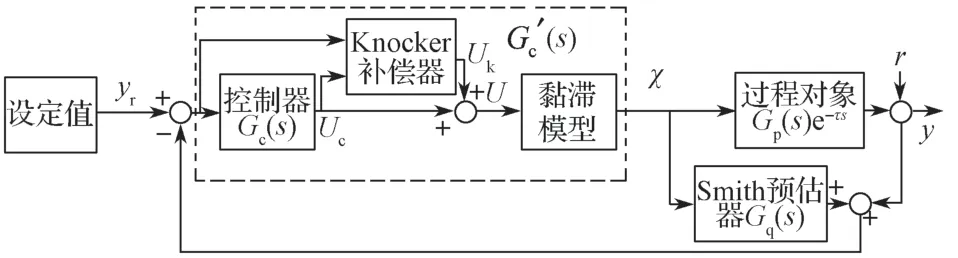
图7 控制系统结构图Fig.7 Control system structure diagram
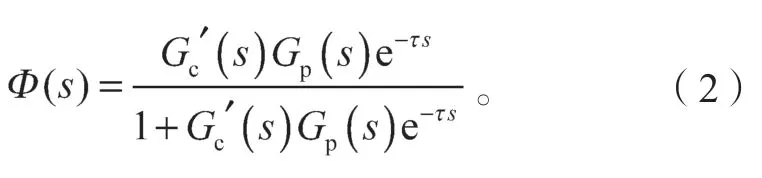
未加入预估器前的闭环传递函数为
为消除闭环系统特征方程中的纯滞后部分e-τs,加入Smith 预估器补偿,该补偿环节的传递函数为

补偿后的闭环系统传递函数为
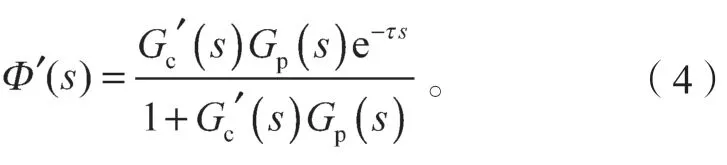
当Smith 补偿器与被控阀门过程对象部分的参数精确相等时,系统闭环传递函数分布中含时滞项部分被抵消,消除了分母中的极点,对控制系统闭环的稳定性能和动态性能有很大的改善,将在后续的仿真环节中引入使用。
4 参数优化
Knocker 补偿器的参数有hk、τ、a1、a2,根据Hagglund 描述[11],脉冲宽度τ一般选为采样时间的1~2 倍,周期hk一般选为脉冲宽度的2~5 倍。幅值a1、a2的合适值受设定信号和控制器参数的影响,难以确定,仿真中这两个值以更小的过程输出振幅为选值标准。改进控制策略中的r1、r2、r3值因存在互相影响的关系,难以确定最好的互配值,本文拟通过樽海鞘群算法得到较好控制效果的参数值。δ值为改进后补偿算法的误差允许值,可通过控制效果的好坏选取最小值,Tp值与Knocker 补偿器的周期有关,本文中选定为5 倍hk来检查5 个周期中误差是否超过阈值,Ts为5 个采样周期的时间长度。
樽海鞘群算法模拟樽海鞘群在捕食过程中聚集成链状的行为,建立一种樽海鞘链模型来优化问题。樽海鞘群种群被分为两种:领导者和跟随者。领导者围绕着食物进行搜寻,跟随者从之。本文在融合多种改进策略后的樽海鞘群算法主要内容如下:
1)通过Tent 映射进行种群初始化[16]:
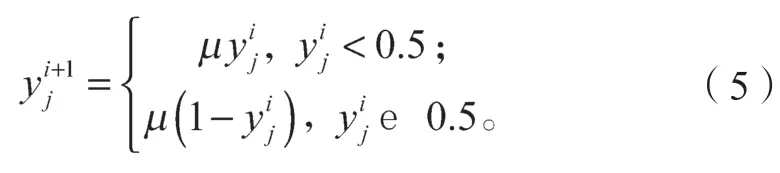
式中:为第j维中第i个变量的初始值;μ为混沌参数,本文取μ=2;i=1,2,…,N为种群规模和混沌序号;j=1,2,…,dim为维数。
将得到的混沌序列y i j映射到种群的搜索空间中,和分别是第j维空间的上下界,即

2)领导者的位置更新如下:
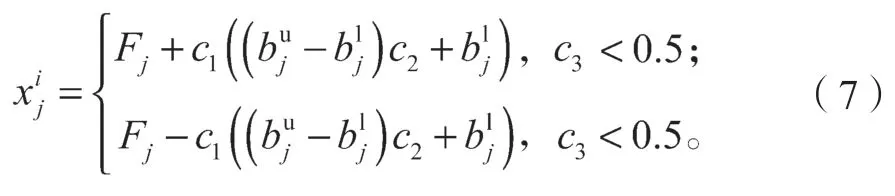
式中:为第i个领导者在第j维的位置;Fj为食物源在第j维的值,食物源的位置即每一代中最优个体的位置;c2和c3为区间[0,1]的随机数,前者决定更新的步长,后者决定方向;c1为领导者在整个迭代时间中全局探索和局部开发的平衡系数,旦

其中,t为当前迭代代数,tmax为最大迭代代数。
3)由文献[17-18]可知,为增强跟随者在迭代前期的探索开发能力,将自适应惯性权重融合到跟随者的位置更新中,跟随者的位置更新见式(9):
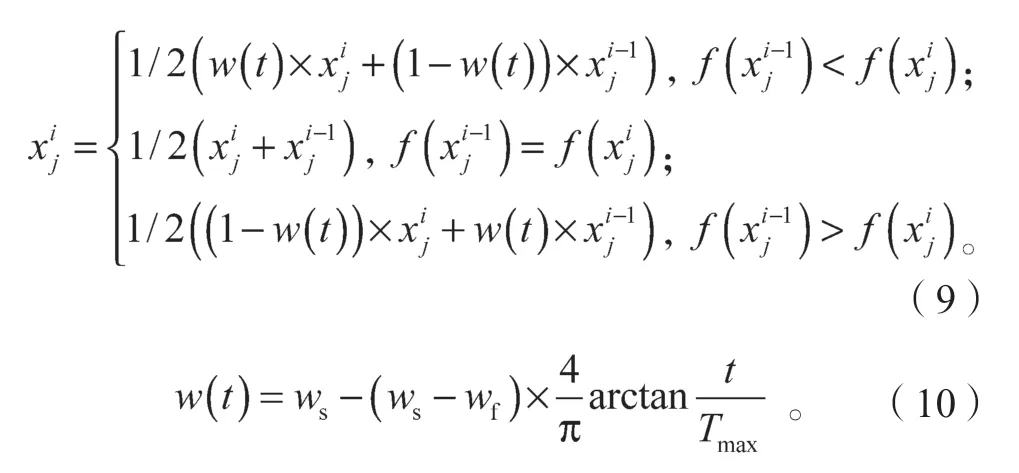
式(9)~(10)中:f(*)为个体目标函数;w(t)为根据式(10)自适应递减的权重因子;经试验寻优,效果最好的ws和wf值分别为0.5 和0.15。
樽海鞘群算法流程如下。
Step 1参数初始化N(种群数量);G(最大迭代次数);L(当前迭代数);dim(搜索个体的维数);bu、bl(搜索上界和下界的dim维向量);混沌初始化参数μ;跟随者更新权重ws、wf。
Step 2根据式(5)生成N个个体的初始种群,并且根据适应度函数值大小排序种群,定义前N/2 个个体为领导者,后N/2 为跟随者,初始化当前迭代次数L=1。
Step 3whileL<G+1,根据式(7)和(9)更新种群位置。
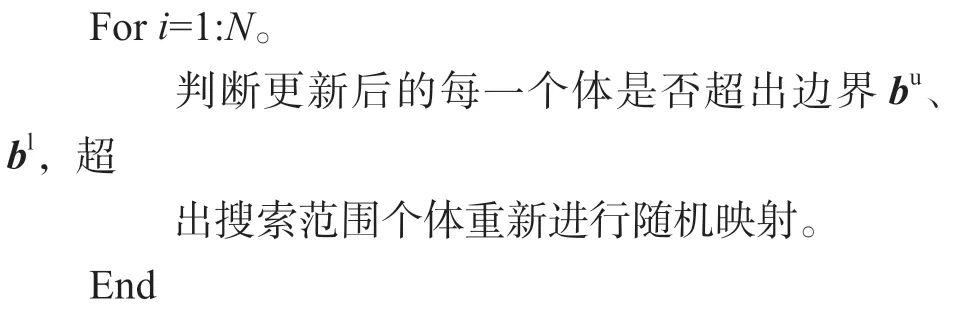
重新根据适应度函数评估个体位置,更新食物位置为最优解位置,本次迭代结束,L=L+1。
Step 4End while 迭代结束,得出最佳个体。
5 系统仿真
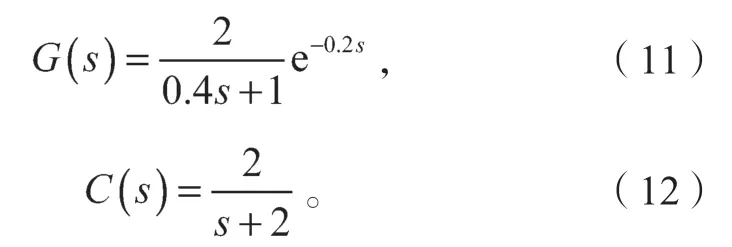
单输入输出的阀门控制回路如图7 中所示,对其进行仿真测试。过程对象如式(11),控制器传递函数模型如式(12)。
二叉树模型摩擦力大小如式(13)。

式中d(k)为k时刻阀杆的运动方向。
为验证多阈值改进Knocker 补偿算法的优越性,将其与文献[9]中的单阈值Knocker 补偿方法进行比较,将二者统一条件后分别仿真,都加入标准差为0.1的白噪声r(t)到过程输出中;Knocker 补偿信号的周期hk=0.8 s;脉冲宽度τ=0.2 s;系统采样时间为0.1 s,仿真时间为2 000 s。
将单阈值的Knocker 补偿加入控制系统中,并通过试凑法得到控制效果较优的Knocker 参数值,即a1=1.192、a2=1.319、r1=0.221,控制效果如图8 所示。
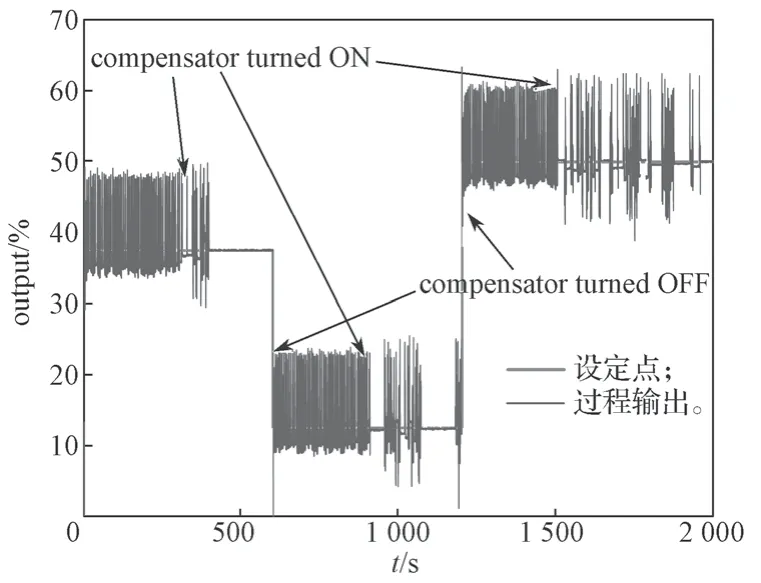
图8 单阈值Knocker 补偿仿真Fig.8 Single threshold Knocker compensation simulation
使用改进后的多阈值Knocker 补偿法与单阈值Knocker 法进行对比,首先幅值同样采用经验试凑法设置,a1=1.094、a2=1.171、δ=0.3,其他仿真条件不变,改进策略中的r1、r2、r3值代入樽海鞘群算法中,以仿真结果的IAE指标作为目标函数,寻找最优阈值,设置搜索种群N=30、迭代次数G=30,IAE的表达式如式(14)所示。

式中:T1、T2为仿真起始和终止时间;e(t)为误差。
得到优化后的3 个阈值分别为r1=0.167 6、r2=0.128 5、r3=0.279 3,补偿效果如图9。
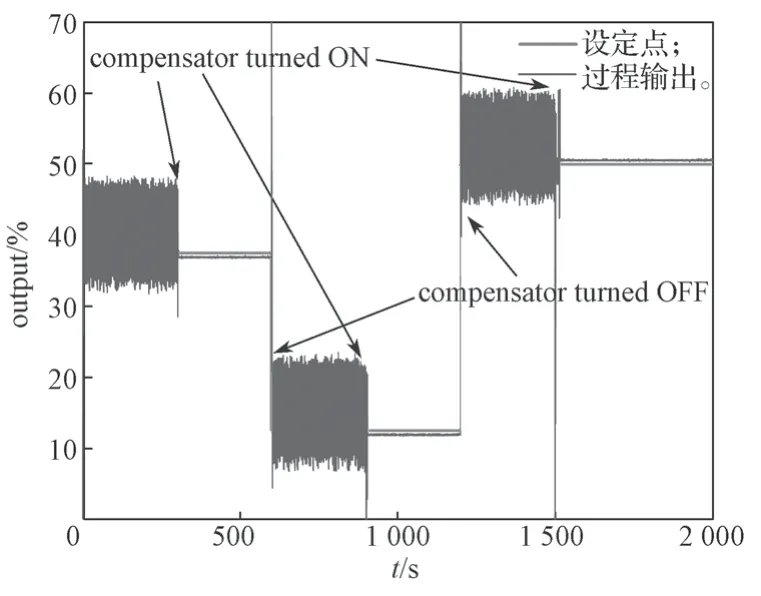
图9 参数优化的多阈值knocker 补偿仿真Fig.9 Multi-threshold knocker compensation simulation based on parameter optimization
对比图8 和图9,可以得知单阈值的Knocker 补偿控制效果不稳定,这种方法虽然总体上降低了阀杆的动作次数,但根据设定点的变化,控制效果参差不齐。而多阈值的Knocker 补偿法在设定点发生跳变的控制要求中,除了能使系统快速达到稳定状态外,还能保持较小的误差,在实际的工业控制中更具有应用意义。
为验证上述结论的真实性,在0~100%开度设定仿真中,以5%为公差计算20 个阶跃输入的仿真结果,设置仿真时间为600 s,分析结果的稳态偏差、标准偏差、IAE、ISE4 种性能指标,并取其平均值,得到的最终结果如表1 所示。
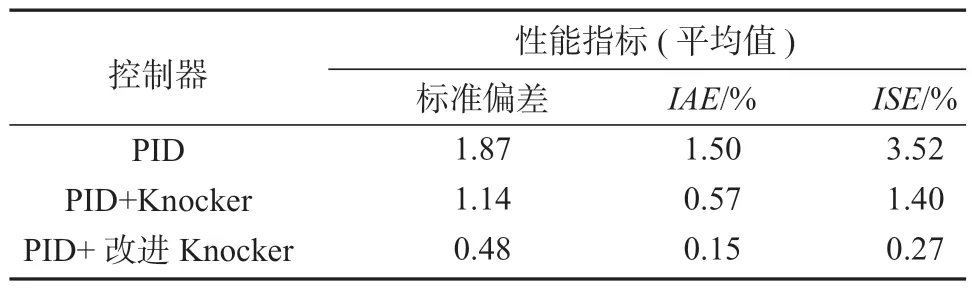
表1 控制性能指标比较结果Table 1 Comparison of control performance indicators
分析表1、图8 和图9 的结果可知,在高黏滞特性的阀门系统中,采用传统的Knocker 补偿控制策略并不能保证所有的控制变量达到预期值,并保持系统稳定性。采取改进后的多阈值Knocker 补偿控制策略后,系统在0~100%开度的控制要求中都能达到稳定,且稳态误差较小,输出误差相对总量程的比率为1%以下,可见提出的方法能一定程度上解决因黏滞导致的阀门控制回路的振荡问题。但本方法以误差作为判断依据对控制器的启闭进行调控,导致控制误差一般不绝对为0,这是本方法的局限所在,因此如果旨在减少误差指标和减少阀杆磨损,而对控制精度没有非常高的要求,本方法较为适用。
6 结语
为克服变摩擦力高黏滞模型控制系统中,因黏滞、死区、滞后等非线性因素导致的控制系统输出震荡和控制精度不佳的问题,创建了以反馈的控制误差和控制器输出值为核心判断依据的多阈值Knocker 补偿+Smith 预估器的控制策略,并且引入了樽海鞘群算法对控制策略中难以确定的参数寻优,简化了部分参数的选定,最后的实验结果显示,改进的控制策略相较传统的补偿策略,其稳态误差在低于1%的同时,大大减少了阀杆动作的次数,同时IAE、ISE等性能指标分别降低73.7%和80.7%,适用于黏滞阀门的控制过程中。