大规模复杂变电站巡检机器人分层路径规划
2023-01-08李睿欣汤明东李海英
李睿欣,汤明东,李海英,黄 微
(上海理工大学机械工程学院,上海 200093)
0 引言
随着电网规模的增大、电压等级的提高,其对供电安全、可靠性的要求也更加严格,变电站正常运行成为保障电力系统供电安全的重要环节[1-2]。目前,中国电网主要采用人工巡检作业方式,即采用人工巡视、手工记录的模式对运行中的变电设备进行检查。人工巡检存在劳动强度大、工作效率低、巡检质量不稳定等缺点,恶劣的气象条件对巡检人员的身体也存在危害[3-5]。近年来,采用机器人巡检代替人工巡检模式已成为变电站巡检发展的热点方向[6-8]。巡检机器人可在变电站的复杂环境中工作,其具有环境感知、任务规划和动作控制等基本功能[9]。在移动机器人技术研究中,路径规划是有效完成复杂任务的关键。
国内山东省电力公司于1999 年最早开始变电站巡检机器人研究,并于2004 年研制成功第1 台功能样机,之后在国家863 项目的支持下研制出变电站巡检机器人[10]。2012 年,重庆电力公司在500kV 巴南变电站成功应用机器人进行自主巡检作业。2014 年,浙江国自机器人公司研制的机器人在瑞安变电站投运。目前,中国在变电站机器人巡检领域取得了长足进展,但在多传感器综合探测、四轮驱动移动平台、综合导航和精确对准、故障精确诊断等技术方面还存在瓶颈[11-12]。如今,随着自动驾驶等新理论及应用的提出,具有全自动驾驶能力的移动机器人也得到了迅速发展,机器人可表现出与人类驾驶员相似的感知和决策能力[13]。虽然机器人在典型的城市交通场景中表现出高性能,但在大规模复杂场景中仍难以实现类人的灵活性和安全性。因此,在大规模、未知或部分未知的变电站复杂环境下,设计一种能够避开固定障碍物及穿越可变障碍物,同时确保安全性、平滑性、灵活性和效率的路径规划方法仍然具有挑战性。
如今,研究者提出了许多路径规划算法。这些算法可分为两类:基于构造的方法和基于探索的方法。基于构造的方法可以在线生成可行且平滑的局部路径,而无需复杂的计算。因此,这些方法适用于高速场景中的运动规划。例如Piazzi 等[14]和Jian 等[15]使用多项式插值执行离线平滑和局部规划。为实现类似的过程,Maekawa 等[16]采用基于样条线的方法,Gu 等[17]使用了回旋线。然而,上述方法无法有效地应用于变电站、停车场、广场和非结构化场景,这些场景中的结构信息不足以构建精确的路径。此外,不正确的注释或环境变化容易导致地图与现实世界不匹配,可能会导致车辆走错方向或影响避障性能。
相比之下,基于探索的运动规划方法可在不依赖地图的情况下处理规划问题。该方法通过构建搜索树来探索环境,直到起点与目标连接起来。其中的代表性方法包括A*[18]和快速探索随机树(RRT)[19]方法,这两种方法都可以找到连接两点的可行路径,同时避免存在障碍物。
本文提出一种变电站复杂环境下的巡检机器人导航方法,以实现巡检路径最优的路径规划。变电站环境中存在各种障碍物,如固定障碍物、可变障碍物等。之前的研究只针对固定障碍物或动态障碍物作出规划,本文创新地提出可变障碍物。可变障碍物是指从不同方向通过它时,可呈现出障碍物或非障碍物的特点(如斜坡、台阶、洼地等)。按照规划的巡检线路,机器人自动记录所有设备以及建筑物的地理信息,进而完成整个地图数据的采集,建立变电站巡检地图,之后规划变电站常规巡检路线。本文考虑到可变障碍物的出现,不断丰富离线地图。采用全局路径规划—局部避障控制具有层次化结构的机器人导航运动控制器,实现机器人导航行为控制,以确保机器人在与人共处的复杂动态环境下可实现安全、高效的导航行为。
为了保持混合A*算法灵活性强的优点,并克服其在搜索速度和路径平滑性方面的缺陷,本文提出一种新的基于层次搜索空间尺度的HHA*运动规划方法,在混合A*算法基础上作进一步优化。所提出的HHA*方法包括两个阶段:第一阶段在粗标度图上执行二维搜索,其中提取出通往目标的粗糙路径。通过对此路径的进一步分析,可找到几个本地目标作为后续搜索过程的指导;第二阶段在精细尺度上进行优化的HHA*搜索,以生成达到目标的可行路径。首先利用第一阶段获得的全局目标进行引导,提高了启发式函数的精度,从而减少了重复的无用扩展,然后利用立体曲线和解析展开曲线提高路径的平滑性。在各种复杂的模拟场景中验证了本文方法的安全性、平滑性、灵活性和高效率。实验结果表明,该方法的计算效率相比混合A*算法提高了6 倍。在全局规划阶段相比混合A*提高了45.48%,在局部阶段相比QBC 算法提高了22.87%,相比TEB 算法提高了16.37%。仿真和实验结果表明,采用该方法在大规模变电站复杂场景中进行巡检,可满足路径规划平滑度和安全性的要求。
1 基本介绍及框架
变电站机器人巡检基本框架如图1 所示。首先机器人按照规划的巡检线路绕整个变电站行走一圈,机器人自动记录所有设备及建筑物地理信息,结合变电站建筑图纸完成整个地图构建数据的采集;然后开启地图生成程序,自动生成变电站巡检地图;地图构建完成后,根据变电站巡检设备类型及数量设定巡检点,并优化巡检路线。当动态障碍物突然出现时,会使原来设定的巡检路线出轨,可利用局部路径规划出新的巡检路线。若遇到可变障碍物,判断可变障碍物地形是否可以通过。如果不能通过,则将其视为障碍物并更新离线地图,继续进行局部路径规划。采用全局路径规划—局部避障控制具有层次化结构的机器人导航运动控制器,以确保机器人在与人共处的复杂动态环境下实现安全、高效的导航行为。
1.1 变电站离线地图构建
变电站巡检地图构建步骤如下:开启机器人激光雷达传感器传输功能,完成激光雷达初始化;遥控机器人按照规划的巡检线路绕变电站行走一圈,机器人自动记录所有设备及建筑物地理信息,完成地图构建数据采集;之后开启地图生成程序,自动生成变电站巡检地图,见图2。
地图构建完成后,根据变电站巡检设备类型及数量设定巡检点,并优化巡检路线,然后进行巡检测试。按照标定完成的最优路线对变电站设备的巡检点进行测试,查找遗漏并调整巡检路线,保证设备巡检点的全覆盖。

Fig.1 Basic framework for substation robot inspection图1 变电站机器人巡检基本框架

Fig.2 Establishment of offline map of the substation图2 变电站离线地图构建
1.2 可变障碍物
可变障碍物是指变电站中能够以某种方向、姿态通过的障碍物,可呈现障碍物或非障碍物的特点。基于这一特点,在变电站离线地图中不可将其视为障碍物,否则将无法得到最优巡检路径。如图3(a)所示的可变障碍物,可以上坡但不能下坡;如图3(b)所示的可变障碍物,只能向下行驶而不能上台阶。变电站巡检机器人能在平坦、开阔的路面行驶,面对可变障碍物则需要判断是否能以特定的方向、姿态穿过。当变电站巡检机器人检测到周围出现人或其他动态障碍物时,通过局部路径规划生成新轨迹,将新路径与变电站地图中的可变障碍物进行比对,判断生成新的路径是否能通过可变障碍物,如果不能通过,则将其放入离线地图中,重新进行局部路径规划。可变障碍物路径规划分析过程如图4所示。
在局部路径规划过程中,随着离线地图的不断丰富,尤其是可变障碍物的出现加大了路径规划难度,所以本文提出面对大规模复杂变电站的路径规划方法。
1.3 丰富离线地图
根据变电站的环境不断丰富离线地图。变电站环境中地形比较复杂且障碍物较多。一开始根据传感器采集到的变电站中电站等固定障碍物信息和可变障碍物信息,将其加入到地图中建立离线地图。由于出现动态障碍物,利用局部路径规划生成新路径。通过不断丰富离线地图,建立动态地图。
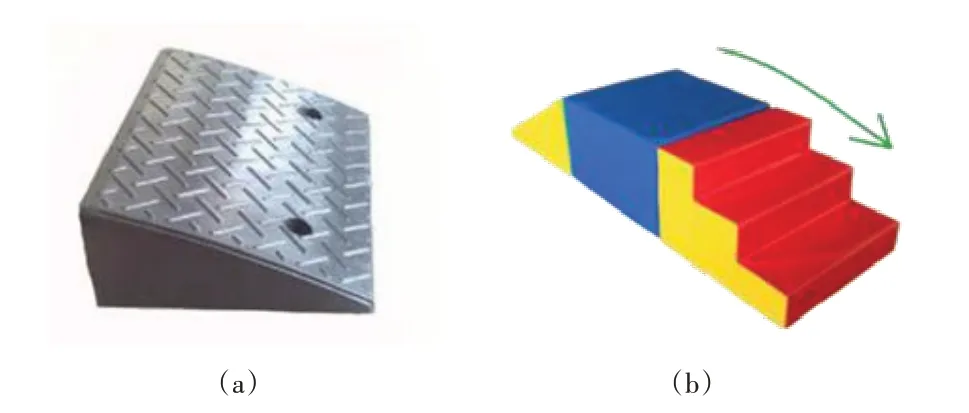
Fig.3 Variable obstacles图3 可变障碍物

Fig.4 Variable obstacle path planning analysis process图4 可变障碍物路径规划分析过程
本文主要将障碍物分为3 种类型:固定障碍物、可变障碍物、动态障碍物。固定障碍物是指变电站中的大型设备,如变压器、电站、建筑物等;可变障碍物是指变电站中能够以某种方式通过的障碍物,不可单纯设定为固定障碍物;动态障碍物是指变电站中的人、突然出现的杂物等。障碍物分类如图5 所示。随着离线地图的不断丰富以及各种类型障碍物的出现,加大了路径规划难度,因此本文特别提出可变障碍物的路径规划。
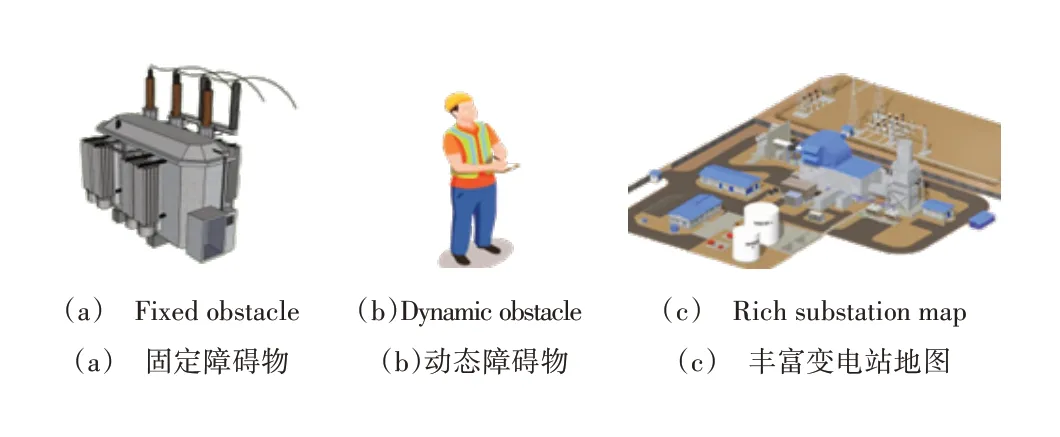
Fig.5 Obstacle classification图5 障碍物分类
2 路径规划算法系统
为了实现变电站巡检机器人的导航行为控制,使机器人在复杂动态环境下实现安全、高效的导航行为,本文提出一种新的基于层次搜索空间尺度的HHA*运动规划方法。
2.1 HHA*算法
基于现有工作,HHA*算法包括预处理和搜索阶段。在预处理阶段,通过粗尺度上的2DA*搜索生成一个引导路径。通过对生成路径的分析,可以找到划分整个搜索空间的局部目标,其中每个部分都相对简单,然后在精细尺度上执行基于A*的混合搜索。在本地目标的指导下,通过使用分层启发式函数,可大大加快搜索速度,从而使整个系统能够及时响应环境中的动态障碍物。此外,利用曲率连续运动单元和展开曲线,使生成的路径可直接满足连续要求。
2.2 启发层次函数
在子目标的帮助下,对不同子区域的状态进行了不同定义。对于每个状态s,将所提出的启发式函数hHHA*定义为:

其中,Sgi表示与s所在位置对应的目标:
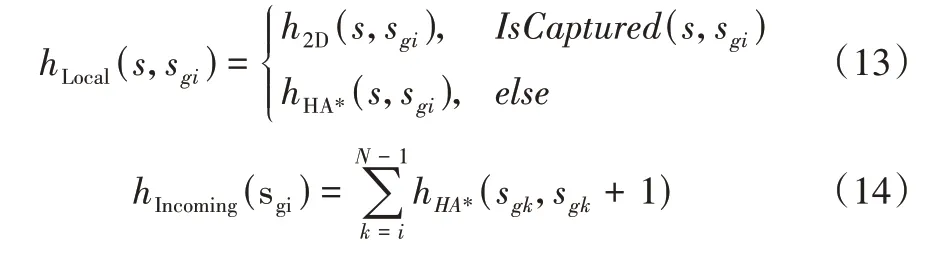
hHHA*由两部分组成:局部启发式hLocal,从s到sgi,以及输入的启发式h,从sgi到最终目标。当搜索树的一个分支通过sgi时,其提供了足够的梯度,并引导搜索过程更快接近最终目标。hLocal与hHA*略有不同,s可以达到具有横向偏移量的sgi。当s足够接近局部目标时,sgi就会退化为h2D,以确保一致性。
2.3 路径平滑度优化
HHA*中的节点扩展采用直线和圆弧作为运动单元。此外,引入Reeds-Shepp 曲线作为解析展开曲线,求出直接解即这些曲线的组合。虽然用该方法可保证最终路径方向的连续性,但是如果直接用于路径跟踪,生成路径在曲率轮廓上的不连续性会引起抖动。因此,在HHA*中需要一个进一步平稳的步骤,以避免这种影响。
本文方法解决了这一问题,即在节点展开和解析展开曲线生成过程中使曲率曲线保持连续。对于节点的展开,引入连接状态曲率与线性曲率的方法;对于解析展开曲线的生成,生成一个具有连续曲率的Reeds-shepp 样曲线。两种方法都能保持曲线和端点的曲率连续,使整个组合路径连续。
2.4 运动单元
引入具有线性曲率的运动单元可用参数{κ0,σ,L,v}表示,其中κ0表示初始曲率,σ表示曲率,l表示曲线长度,v=±1 表示驱动方向。通过积分得到运动单元对状态的影响:
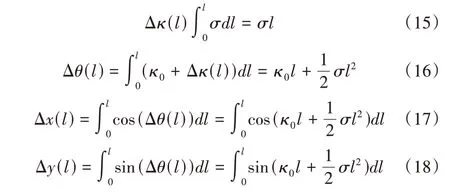
通过旋转和平移变换,运动单元可被附加到任何具有相同曲率的状态s0=[x0,y0,θ0,κ0,d0]T上。生成的子状态如下:
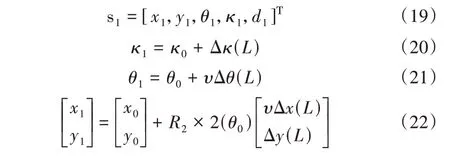
其中,R2× 2(θ)表示二维旋转矩阵:

当σ=0 时,式(17)、式(18)的表达式退化为混合A*的表达式:

否则,根据初始曲率κ0=0,当σ=0 时,式(17)、式(18)可使用菲涅耳积分计算得到:
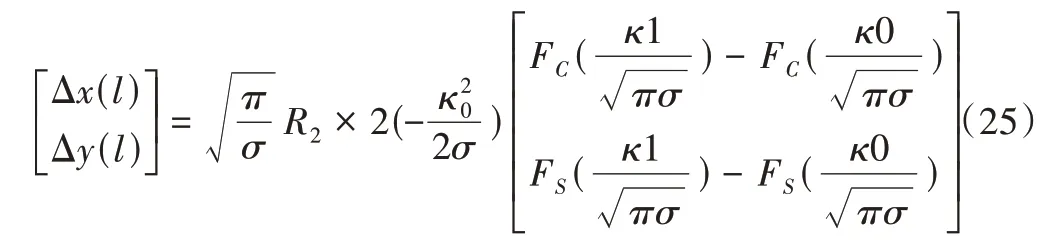
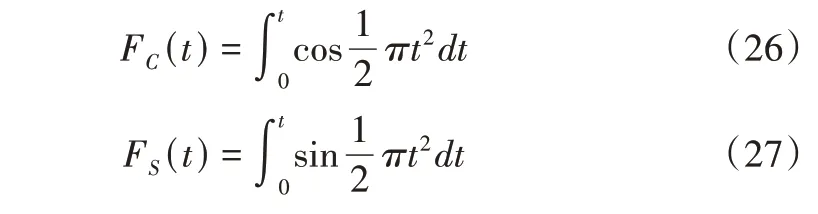
其中,FC(t)和FS(t)为菲涅耳积分,分别为:
使用所提出的运动单元的效果如图6(a)、图6(b)所示,图6(a)显示了环形曲线(κ0=0,σ=0)平滑地连接直线段(κ0=0,σ=0)与弧线段(κ0=0,σ=0)。图6(b)的方法与图6(c)所示的混合A*相比,可在保持生成路径连续性的同时,有效地提高整体平滑度。
3 仿真实验

Fig.6 Comparison of motor units in mixed A*and HHA*图6 混合A*与HHA*中的运动单元比较
本文提出一种新的基于层次搜索空间尺度的HHA*运动规划方法,该方法相比混合A*具有更高的搜索效率,并能得到更平滑的结果。此外,与RRT*方法相比,HHA*也具备这些优势。在各种虚拟场景下进行实验比较,验证该方法的优越性。此外,还在变电站巡检机器人平台上通过算法实验作进一步的道路测试。
3.1 层次启发式函数实验
引入100m×100m 的多障碍物场景来模拟变电站场景,验证所提出的层次搜索结构,如图7 所示。其中,黑色栅格为固定障碍物,灰色栅格为可变障碍物,圆圈为动态障碍物。巡检机器人从点A 到点B 行驶,黑色虚线表示变电站常规巡检路径,红色实线表示HHA*算法的实验结果,蓝色虚线表示混合A*算法的实验结果。

Fig.7 Path planning Comparison of HHA*and hybrid A*algorithms图7 HHA*与混合A*算法路径规划对比
HHA*能够识别可变障碍物,同时能够避开动态障碍物。混合A*不能识别可变障碍物,并将可变障碍物当作固定障碍物处理,且路径较长。
表1 中列出了以上两种方法的数值分析结果。两种算法都可在场景中生成可行的路径,但在搜索节点数量上存在显著差异。与预测的一样,混合A*中采用的两种启发式方法都不能真正代表到目标的距离,其搜索节点和时间消耗是HHA*的几十倍。
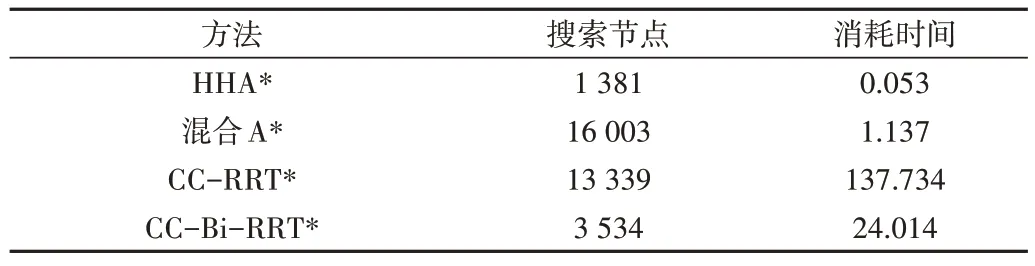
Table 1 Comparison of HHA*with the other methods表1 HHA*与其他方法比较
两种方法沿生成路径移动的f 值如图8 所示。由于受到被低估的启发式函数的影响,混合A*的f 值在整个过程中不断增加,如图8(b)所示。相比之下,由于每个子区域比较简单,HHA*中的启发式函数可以很好地进行估计,从而得到图8(a)中的多个平坦范围。此外,图8 中显示了下降情况,表明当路径通过子目标时,f 的总体趋势保持下降,解析展开式对搜索空间的划分也有较好效果。然而,根据表1,通过所提出的局部目标,HHA*中的解析扩展式获得了更高的成功率,从而产生了更好的优化效果。与上述相反的是,在混合A*中,虽然尝试了数千次的分析展开,但大部分被碰撞实验拒绝,导致搜索速度无法得到提高。

Fig.8 f values of paths generated by both methods图8 两种方法生成的路径f值
3.2 路径平滑性分析
对HHA*和混合A*生成的路径进行曲率分析,比较其平滑性。生成的路径曲率曲线如图9 所示,其中图(a)-(b)由HHA*生成,图(c)-(d)由混合A*生成。HHA*方法相比混合A*获得了更平滑的曲率轮廓。在混合A*产生的路径中有几十个曲率,其中包含不连续的点。因此,HHA*中使用的方法满足连续要求,而混合A*中使用的Reeds-Shepp曲线则不满足要求。
4 路径规划实验
本节精心设计了具有挑战性的实验场景,以验证该方案的效率、灵活性、平滑性和安全性,并对实验结果进行了详细讨论。
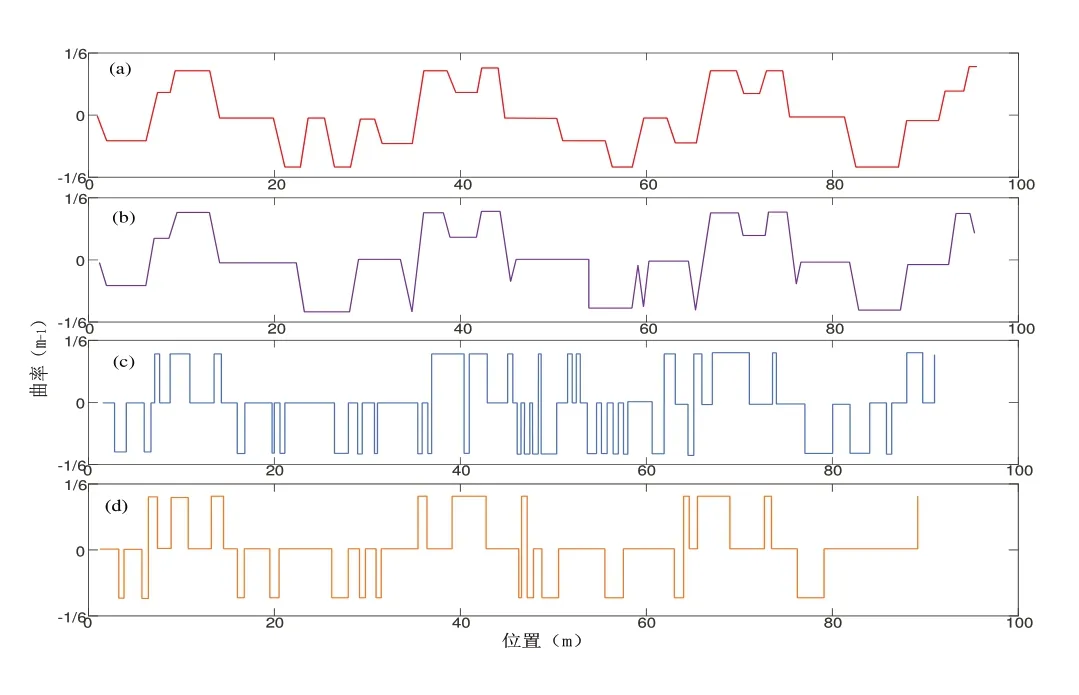
Fig.9 Curvature curve of the path图9 生成的路径曲率曲线
4.1 实验设置
本文实验在配备HokuyoUTM30LX 激光测距仪的先锋3-DX 差速驱动机器人上进行,如图10(a)所示,该机器人的最大线性速度为1.2 m/s。考虑到变电站导航的安全性,本文将线速度的上界设为0.7 m/s。激光测距仪的扫描范围为270°,角度分辨率为0.25°,且有效测量范围为0.1~30m。

Fig.10 Experimental environment图10 实验环境
4.2 全局路径规划
为验证本文提出的路径规划方法的优越性能,方案1的设计如图10(b)所示。一个盒子被放置在机器人前面作为一个可变障碍物,机器人必须到达门口。
为了对路径规划进行公平的比较,在方案1 的测试中使用了相同场景。在两组测试中,全局路径规划的线程被触发61 次,基于混合A*的路径规划器的平均扩展状态数与图大小分别为1 794 和4 226,而本文建议的HHA*路径规划的平均扩展状态数分别为978 和1 815。与基于混合A*的路径规划相比,该路径规划的计算效率与内存消耗分别提高了45.48%和57.05%,证明了所提出的基于层次搜索空间尺度的HHA*路径规划方法的有效性。
4.3 局部路径规划
为了验证所提出的局部规划方法的灵活性、平滑性和效率,设计了方案2,如图11(a)所示。在此情况下,机器人需要沿着一条长长的走廊移动,并向右急转弯以通过门。此外,门缝里有两个盒子作为可变障碍物。该场景需要局部路径规划提供平滑和灵活的运动来引导机器人达到目标。其中,本文HHA*路径规划结果如图11(b)、图11(d)所示,QBC 路径规划结果如图11(c)所示,TEB 路径规划结果如图11(e)所示。
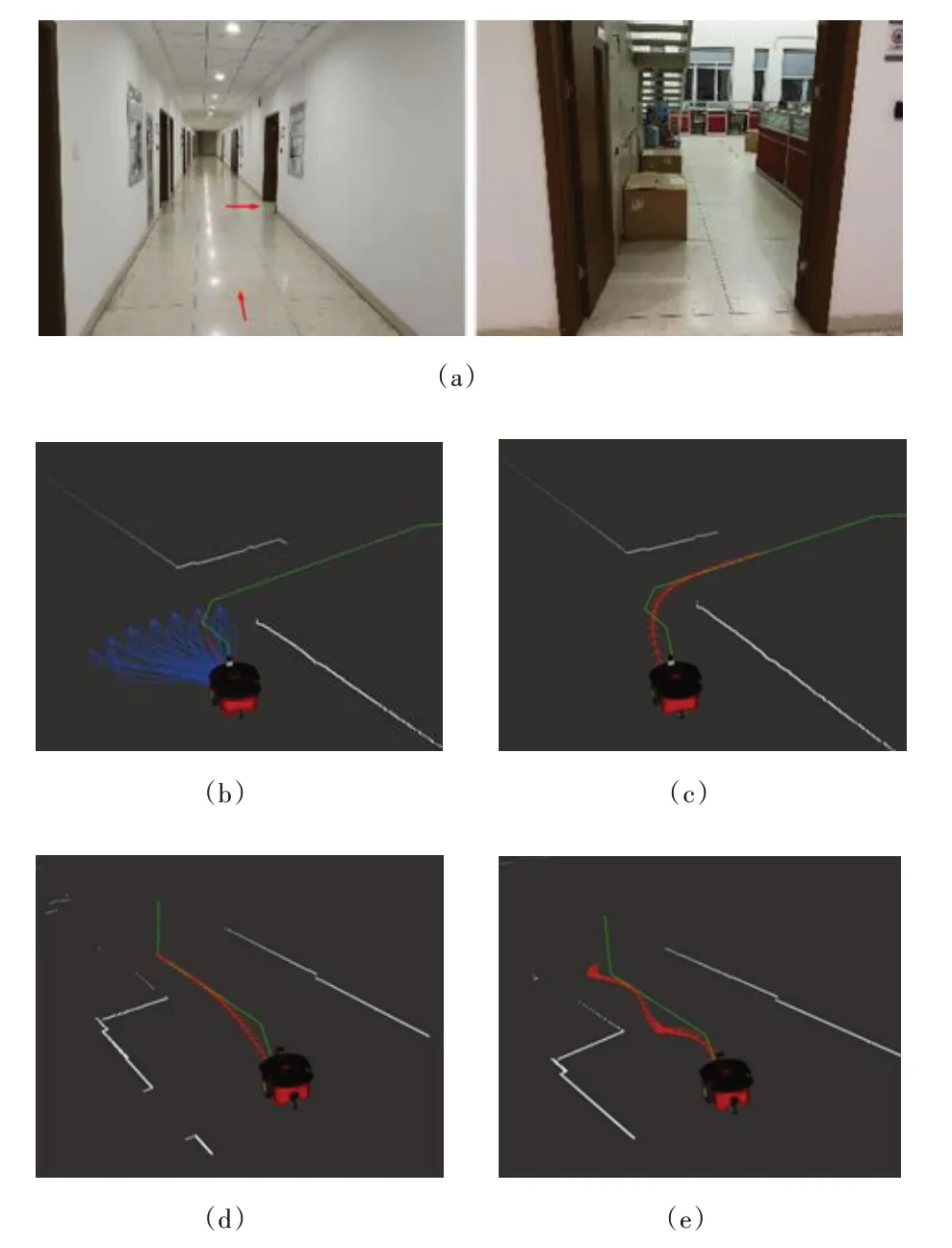
Fig.11 Comparison of different results for path planning图11 不同路径规划结果比较
在方案2 的测试中,本文提出的局部规划方法显示出良好的运动效率和灵活性。特别是当机器人接近门并需要急右转时,通过局部规划引导机器人顺利通过门,如图11(b)所示。相比之下,如图11(c)所示,QBC 会引导机器人缓慢地通过门,离线设计的Bezier 曲线的端点是固定的,不能根据实时规划任务进行调整,从而限制了局部规划运动的灵活性。重复实验几次,实验结果见表2。QBC大约需要25s 引导机器人达到目标,而本文的HHA*局部规划方法只需要19s。与QBC 相比,本文提出的局部规划方法的运动效率提高了22.87%。本文还将其与路径局部规划算法TEB 进行了比较,结果表明,本文方法得到的局部路径明显比TEB 更平滑,如图11(d)、图11(e)所示。重复几次实验,由表2 可知,TEB 大约需要23s 引导机器人到达目标,相比于TEB,本文提出的局部规划方法的运动效率提高了16.37%。基于以上对比实验结果,得出了本文提出的局部规划方法在平滑性、运动效率和灵活性方面都具有优势。
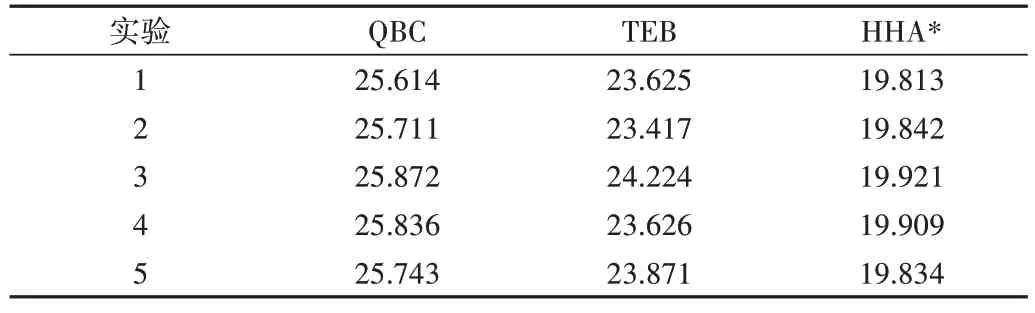
Table 2 Comparison of motor efficiency(s)in scheme 2表2 方案2中运动效率比较
5 结语
本文提出一种HHA*运动规划方法来解决变电站复杂场景下机器人的运动规划问题,针对变电站中的可变障碍物提出解决方案。本文所提出的HHA*方法包括两个阶段:第一阶段在变电站粗标度图上执行二维搜索,其中提取出通往目标的粗糙路径,通过对此路径作进一步分析,可将障碍物进行具体分类作为后续搜索过程的指导;第二阶段在精细尺度上进行优化的HHA*搜索,克服了混合A*在搜索速度和路径平滑性方面的缺陷。在该方法中,采用一种新的启发式函数来加速搜索,同时采用连续运动单元来提高生成路径的平滑性。实验结果表明,本文方法在运行速度和路径平滑性方面相比其他方法具有更大优势。进一步的道路实验表明,该方法能更好地响应快速变化。后续工作还将对该方法进行扩展,以更好地与场景中的动态障碍物进行交互。