狭窄及隐蔽地下空洞三维探测系统的研制
2023-01-08夏永华杨明龙简小婷
朱 琪,夏永华,王 冲,杨明龙,简小婷,朱 文
(1.昆明理工大学国土资源工程学院;2.云南省高校高原山区空间信息测绘技术应用工程研究中心,云南昆明 650093;3.昆明理工大学城市学院,云南昆明 650051;4.中国电建集团昆明勘测设计研究院有限公司,云南昆明 650041;5.云南省基础地理信息中心,云南昆明 650034;)
0 引言
近年来,国家大力推进基础设施建设,其中会遇到各种类型的地下岩溶地质问题[1],导致地基承载力不足、不均匀沉降、地基滑动、塌陷等问题发生,对工程建设和人员安全可能会造成极大危害[2]。因此,必须妥善治理地下空洞。
治理的前提是需要精确了解地下空洞的大小、形状、走向等数据。但在实际测量过程中,通常由于下放孔径小、空间形态复杂、埋深大、人员及测量设备无法到达、安全风险大等因素,难以准确测量空洞数据。
传统地下空洞探测手段包括地质钻探、电法、三维探测成像仪、钻孔电视、地震反射和探地雷达等,但此类常规探测手段只能定位地下空洞的大致位置,无法精确探明地下空洞的三维形态和体积[3-4]。许汉华等[1]将钻井电视放入钻井孔内查明空洞、溶洞充填物等,但由于设备的局限性,仅能检测以探头为中心两米内的范围。李婕[5]采用地质雷达从地表上向地下发射高频电磁波,但该方法只能探测公路路基中溶洞的深度、介质特性。石学录等[6-7]通过钻孔地质三维探测成像仪检测溶洞内部情况,但该方法仅能分析钻孔周围岩体4 个方向的距离、形状及平面体积和钻孔的夹角。因此,传统探测手段存在获取形态和体积难度大、实时性弱、探测精度低、直观性差等问题。
目前,不少学者采用三维激光扫描技术对空洞进行勘探,该方法是现阶段获取空间数据的重要手段,具有高效率、精度高、无接触等优势。现有装置包括Optech 公司的洞穴扫描系统CMS、GeoSight 公司的集成式三维激光测量系统矿晴MINEi、MDL 公司的地下空间三维激光扫描系统C-ALS[8]等,此类设备主要应用于矿山空区、巷道,测量精度高,但价格十分昂贵。
为满足实际应用需求,采用消费级二维激光雷达来实现以上设备功能。蔡泽宇等[9-10]采用二维激光雷达搭载上下行程云台,构建一个三维空间扫描系统,只对研究目标的三维模型进行轮廓识别。黄风山等[11-16]利用旋转工作台或俯仰装置与二维激光雷达相结合,构建一种旋转二维激光雷达三维扫描测量系统,但扫描范围和角度均在90~180°间,有效范围微乎其微,难以满足实际需求。
针对上述问题,本文设计一种适用于地质勘探领域,获取地下空洞三维数据的系统。该系统通过自主研发的激光扫描探头采集数据,并开发了相对应的装置控制、数据转换、数据处理与实时显示软件,以获取地下狭窄隐蔽空洞的三维点云数据,并对系统进行可行性实验和精度分析。
1 地下空洞三维探测系统
地下空洞三维探测系统(Underground Cavity Detection System-3D,UCDS-3D)主要由激光扫描探头、固定支架、控制器、连接支杆及系统配套软件组成,如图1所示。
UCDS-3D 系统在探测勘探过程中,遇到的地下隐伏岩溶等其它空洞(见图2)时,既能自动获取空洞的三维数据、视频、照片等信息,又能探明岩石层信息、溶蚀、破碎等地下情况。
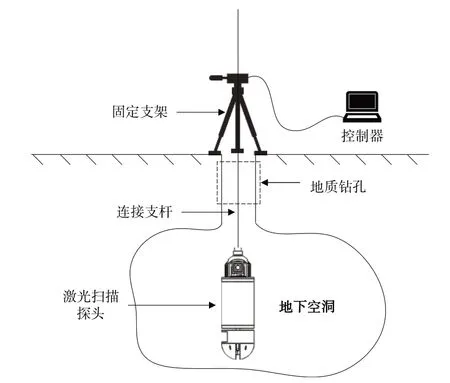
Fig.1 Composition of UCDS-3D system图1 UCDS-3D系统组成结构
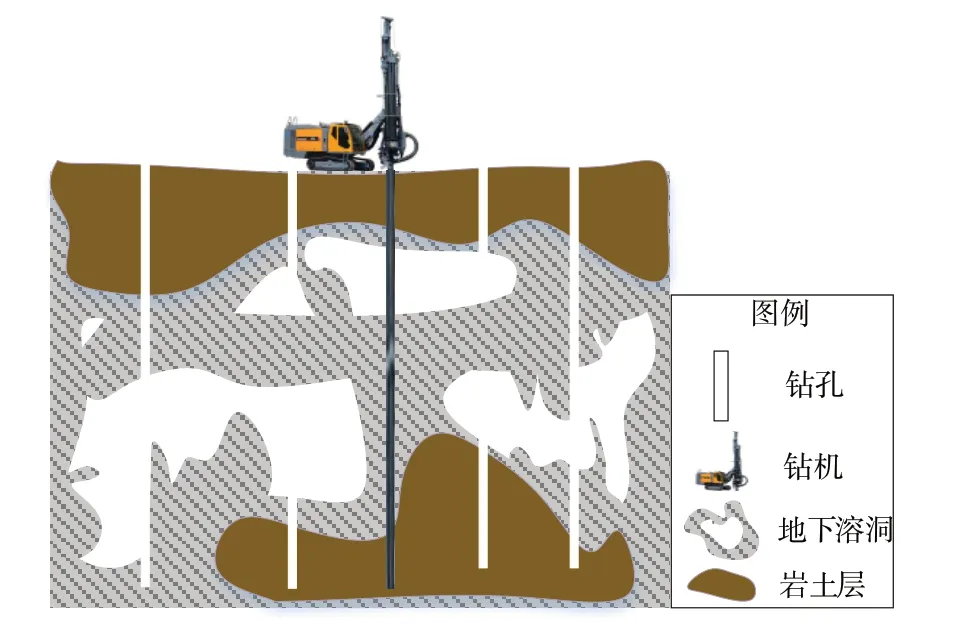
Fig.2 Underground cavity in geological exploration图2 地质勘探的地下空洞
1.1 工作原理
UCDS-3D 系统的工作流程如图3 所示,主要组件为激光扫描探头。激光扫描探头包括扫描端和探测端,扫描端采用低成本二维激光雷达,在每次扫描过程中雷达测距核心随电机驱动呈顺时针旋转,对周围环境进行全方位扫描,并发射调制后的红外激光信号。目标物体的反射信号将被雷达视觉采集系统接收,然后经过处理器解算得到目标物体与雷达的距离、夹角信息,最后将数据统一输出。
根据雷达运行规律,本文在配置驱动器、控制板、姿态系统等装置的基础上,增加一个与雷达二维坐标系垂直的坐标轴,以获取目标三维数据。其中,探测端采用红外高清摄像头、驱动器、控制板等器件采集目标区域内视频、照片等有效数据,探明岩层界面、溶蚀裂隙及破碎地带,分辨空洞与溶洞充填物;外置控制器USB_485 端口与激光扫描探头中的单片微型计算机(Micro Controller Unit,MCU)的TTL_485 端口连接,操控MCU 控制探头进行数据采集、机械驱动、电压输送、数据信号传输等操作。
1.2 硬件组成
UCDS-3D 系统硬件主要由激光扫描探头、固定支架和连接支杆构成。其中,固定支架和连接支杆使用现有设备;激光扫描探头分包含上、中、下3 部分,上端为探测端,中端为驱动装置、集成板和防护罩,下端为探头端,规格为Φ10cm,H38cm,如图4所示。
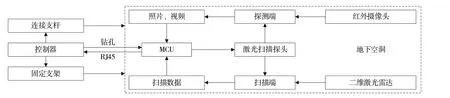
Fig.3 Flow chart of working principle of UCDS-3D system图3 UCDS-3D系统工作原理流程图
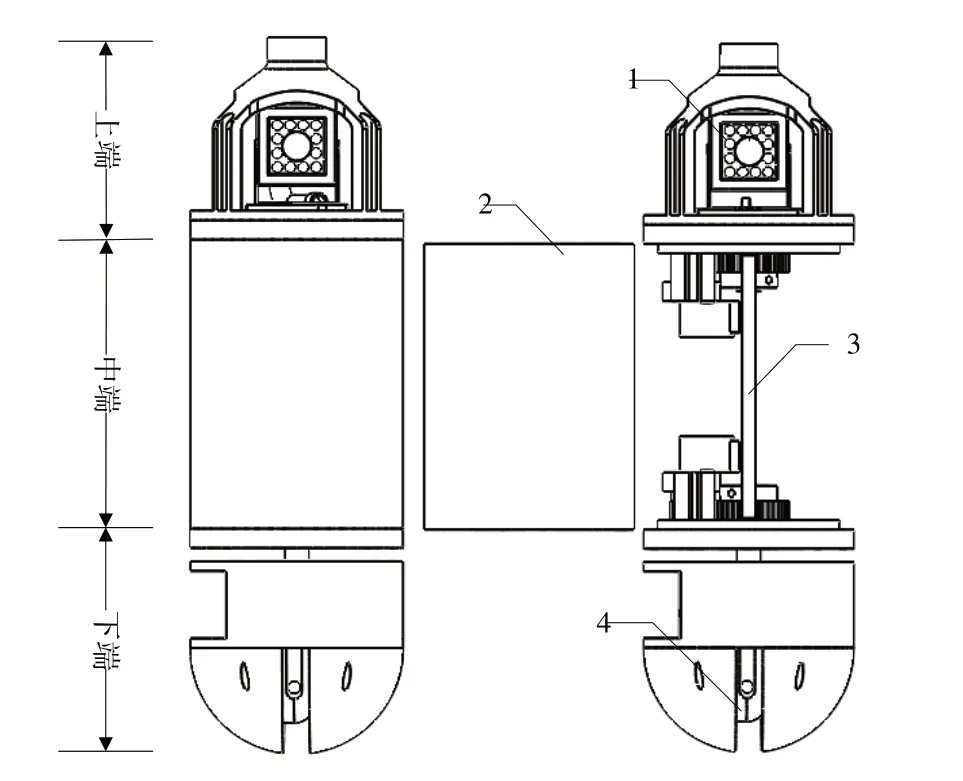
Fig.4 Composition of laser scanning probe图4 激光扫描探头的组成
二维激光雷达采用SLAMTEC 公司的RPLIDAR A3M1,该设备应用激光三角测距技术,配合高速视觉采集处理器,具备高达16 000 次/s 的高速激光测距采样能力。在检测远距离物体、黑白物体切换及强光直射物体时,测距仍然保持稳定,可在25m 半径范围内进行全方位激光扫描测距,产生所在空间的平面点云地图信息。RPLIDAR A3M1激光雷达具体参数如表1所示。
相较于其它品牌激光雷达,RPLIDAR A3M1 激光雷达具有以下优势:①体积小,规格为Φ7.6cm,H4.1cm,几乎是市场现有专业级或消费级二维、三维激光雷达中规格最小的激光雷达;②低成本;③性能强,A3M1 较于同价位二维激光雷达的性能更强。

Table 1 RPLIDAR A3M1 parameter表1 RPLIDAR A3M1参数
1.3 软件开发
UCDS-3D 系统软件包含雷达配置软件Slamtec RoboStudio 和自主开发的UCDS-3D-Data Conversion,主要实现数据采集、数据转换及数据的可视化、预处理等功能。
1.3.1 Slamtec RoboStudio
Slamtec RoboStudio 一款可扩展的机器人管理与开发的电脑桌面应用软件,能够提供Frame grabber(帧抓取器)插件与激光雷达建立通信,调试图形化、控制器扫描速度,显示扫描视图,获取激光雷达数据及状态信息。
软件包含Standard、Express、Boost、Sensitivity、Stability共5 种扫描模式,依据采样频率可将扫描模式量程分为6m、10m、16m、35m。在RPLIDAR 工作时,每个采样点数据(见表2)将通过通讯接口进行输出,输出格式为文本。

Table 2 Data information of RPLIDAR A3M1 sampling points表2 RPLIDAR A3M1采样点的数据信息
1.3.2 UCDS-3D-DataConversion
地下空洞三维探测系统数据转换及显示软件(UCDS-3D-Data Conversion and Visualization)是针对RPLIDAR 激光雷达自行开发的一款数据转换及三维显示软件,主要包括文件输入输出、数据转换和数据显示3 个模块。软件整体设计流程如图5所示。
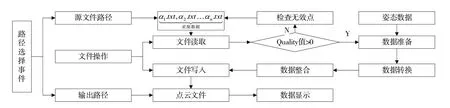
Fig.5 Flow chart of software design of UCDS-3D Data Conversion and Visualization图5 UCDS-3D—Data Conversion and Visualization 设计流程图
软件基于Microsoft Visual Studio 2017(简称为VS2017)平台,采用使用Q(t跨平台C++图形用户界面应用程序开发框架)搭建框架,使用大型跨平台开源C++编程库点云库(Point Cloud Library,简称PCL)进行开发。其中,PCL 集成三维信息显示、处理的关键技术和算法,包含许多点云处理的通用算法和管理点云数据的高效数据结构;Qt 通过Qt Visual Studio Tools 插件将开发工具集成至Microsoft Visual Studio 中,便于后期使用可视化图形界面编辑器Qt Designer 设计操作界面。
(1)数据转换页面。首先读取多个激光雷达数据文件中的有效数据;然后基于新构建的三维坐标系统将其转换为三维数据;接下来将三维点云数据通过通用格式进行整合并写入新建文件;最后输出tx(t文本文档)和PCD(Point Cloud Data)两种格式的数据。图6为数据转换界面。
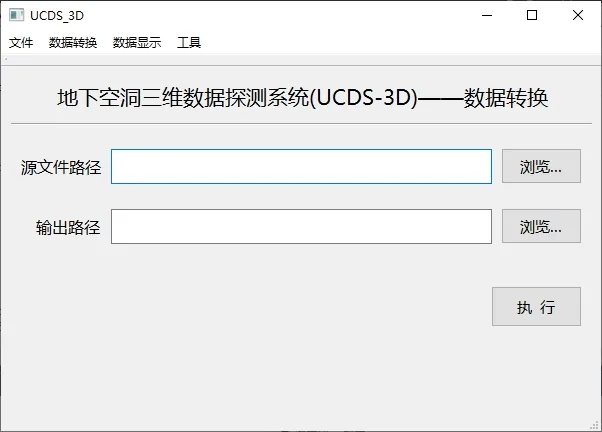
Fig.6 Data conversion interface图6 数据转换界面
(2)数据显示页面。数据显示页面实时显示转换后的三维数据,有助于操作者查看数据采集情况以分析数据的有效性,如图7 所示。由于该软件使用Qt 框架,需要首先使用Cmake 编译对应版本PCL 的VTK 源文件;然后将编译后的二进制文件放入Qt 文件夹中;最后在Qt Designer 工具栏中产生“QVTK Widgets”插件显示功能,运用此插件显示三维数据。此外,PCL 中包含众多类库,数据显示页面包括公共模块(Common)、文件读写模块(IO)、表面重建模块(Surface)、可视化模块(Visulization)。
2 UCDS三维坐标系的建立及转换
UCDS 三维坐标系主要由UCDS-3D 地下空洞三维数据探测装置的扫描端数据构建而成,该部分由雷达部分、驱动部分、传动部分、控制部分、底盘组成。其中,雷达部分通过传动部分与驱动部分相连,由驱动部分带动雷达部分旋转,为二维激光雷达增加第三维度,构建UCDS 三维坐标系。
2.1 转换原理
A3M1 雷达扫描得到被测对象的二维信息,包括距离值d(旋转中心距离采样点之间的实际距离)和夹角θ(当前采样点相对于雷达自身朝向的夹角),将其以极坐标形式进行保存,具体计算公式如下:
Fig.7 Data visualization interface图7 数据显示界面

A3M1 雷达遵循左手法则坐标体系,在二维激光雷达扫描平面上建立二维坐标系o-x1y1,坐标系原点为扫描核心的旋转中心o,传感器正前方定义为坐标系的x1轴(与二维激光雷达0°扫描光束的发射方向相同),y1轴的正方向与激光雷达90°扫描激光束的发射方向相同,具体坐标系定义如图8 所示。根据式(2)将扫描平面上P点的极坐标(d1,θ1)转换为直角坐标(x1,y1)。

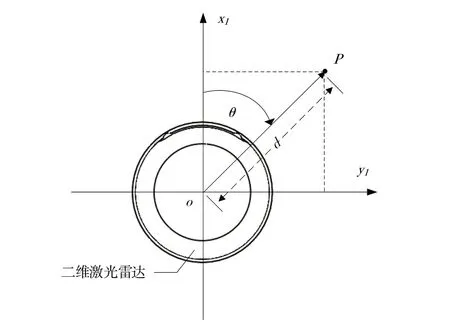
Fig.8 Definition of RPLIDAR A3M1 scanning data coordinate system图8 RPLIDAR A3M1扫描数据坐标系定义
如图9 所示,P点所在面为初始扫描面,在机械装置的驱动下,雷达以扫描核心为中心且垂直于水平面方向上旋转角度α后得到第二次扫描面,并获取第二次扫描面上的P'点极坐标(d2,θ2)。此时,姿态系统输出角度α(初始扫描面与第二次扫描面的二面角PoP')。
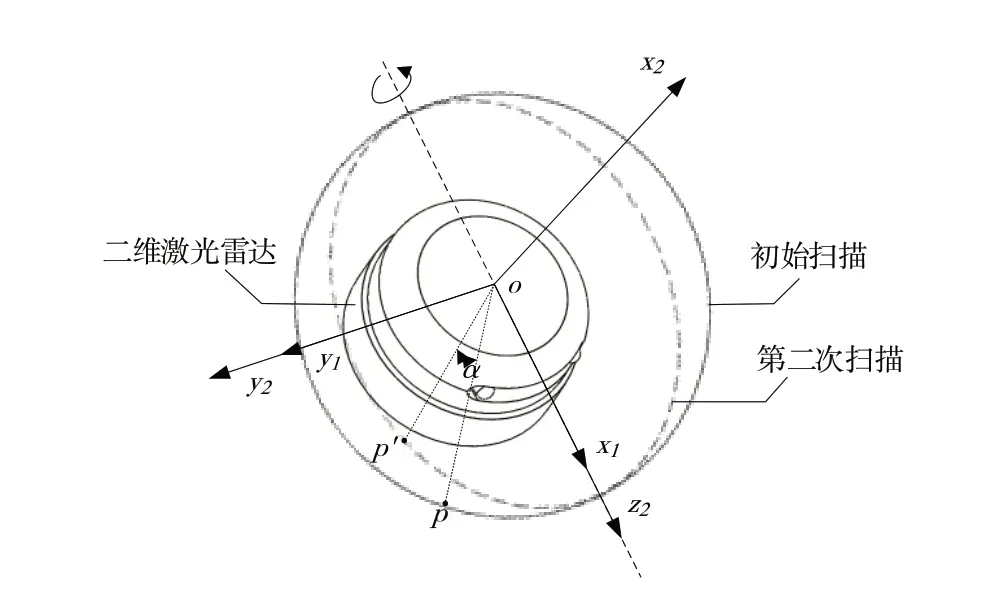
Fig.9 Establishment principle of UCDS three-dimensional coordinate system图9 UCDS三维坐标系建立原理
为了整合激光雷达在同一位置不同垂直面的二维数据,需要以二维坐标系o-x1y1和对应扫描面旋转角α为基础,构建一个三维坐标系o-x2y2z2。其中,o为扫描核心的旋转中心,x1轴则转换为坐标系o-x2y2z2的z2,y1轴转换为y2,然后由空间坐标系右手法则获取x2。如图10 所示,根据初始扫描和第二次扫描两种情况将三维坐标系o-x2y2z2划分为二维面x2oy2与二维面x2oz2,具体计算公式如下:
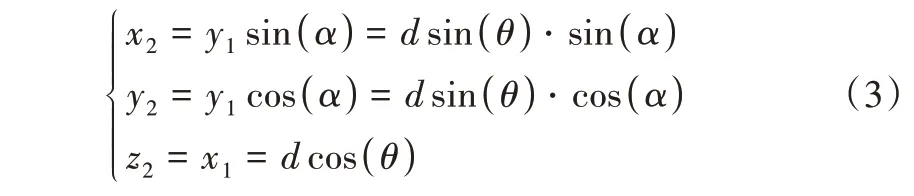
在三维坐标系o-x2y2z2中,初始扫描面上点P(d1,θ1)旋转角为0°,极坐标形式为P(d1,θ1,0),根据式(2)、式(3)可得三维坐标P(0,d1sin(θ1),d1cos(θ1));同理,第二次扫描面上点P'(d2,θ2)旋转角为α,极坐标形式为P'(d2,θ2,α),三维坐标为P(d2sin(θ2)sin(α),d2sin(θ2)cos(α),d2cos(θ2))。因此,二维激光雷达多次扫描的数据可由UCDS 三维坐标系进行表示。
2.2 坐标系转换
将UCDS 坐标系下的三维数据转换为国家大地坐标系,融合测绘、地质等各方数据,便于确定地下空洞的走向,有助于工程设计、施工和评价等方面使用。
如图11 所示,UCDS 三维坐标系的原点为二维激光雷达扫描核心的旋转中心o2,过中心垂直于激光雷达为坐标系的x2轴,y2轴的正方向与激光雷达90°扫描激光束的发射方向相同(平行于地面),激光雷达正前方为坐标系的z2轴(垂直于地面,与连接支杆同方向)。
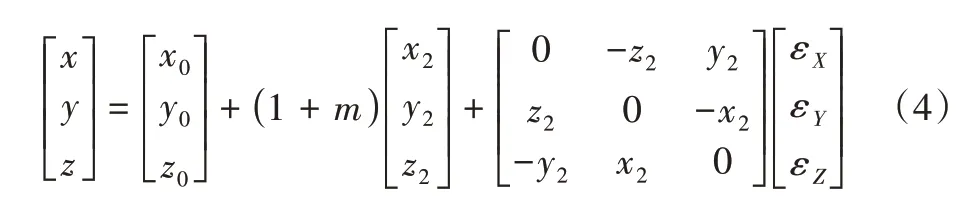
在固定支架上方添加一根标定杆(共有标靶点A、B、C)垂直于连接支杆,平行于二维激光雷达初始扫描方向。首先,通过测量工具获取标靶点A、B、C 在CGCS2000 的绝对坐标A(xA,yA,zA)、B(xB,yB,zB)、C(xC,yC,zC)、AB 的水平距离DAB、BC 的水平距离DBC和标定杆到激光雷达的高差h。然后,在不考虑地球曲率、UCDS 三维坐标系、标定杆及地面相互限定等条件下,取得原点o2在CGCS2000 系的绝对坐标(xC,yC,zC-h),点A、B、C 在UCDS 三维坐标系下的相对坐标为A'(0,DAC,-h)、B'(0,-DBC,-h)、C'(0,0,-h)。坐标变换采用适用于任意两个直角坐标系统相互变换的布尔莎七参数变换模型,如图12 所示。坐标变换包含3 个平移参数x0、y0、z0和3 个旋转参数εx、εy、εz,考虑到两个坐标系尺度不一致,设定一个尺度变化参数m[17],相应的布尔莎七参数公式为:
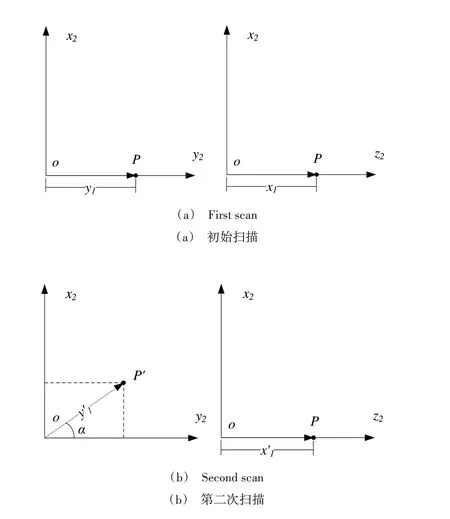
Fig.10 Exploded view of three-dimensional coordinate system图10 三维坐标系o - x2y2 z2分解图
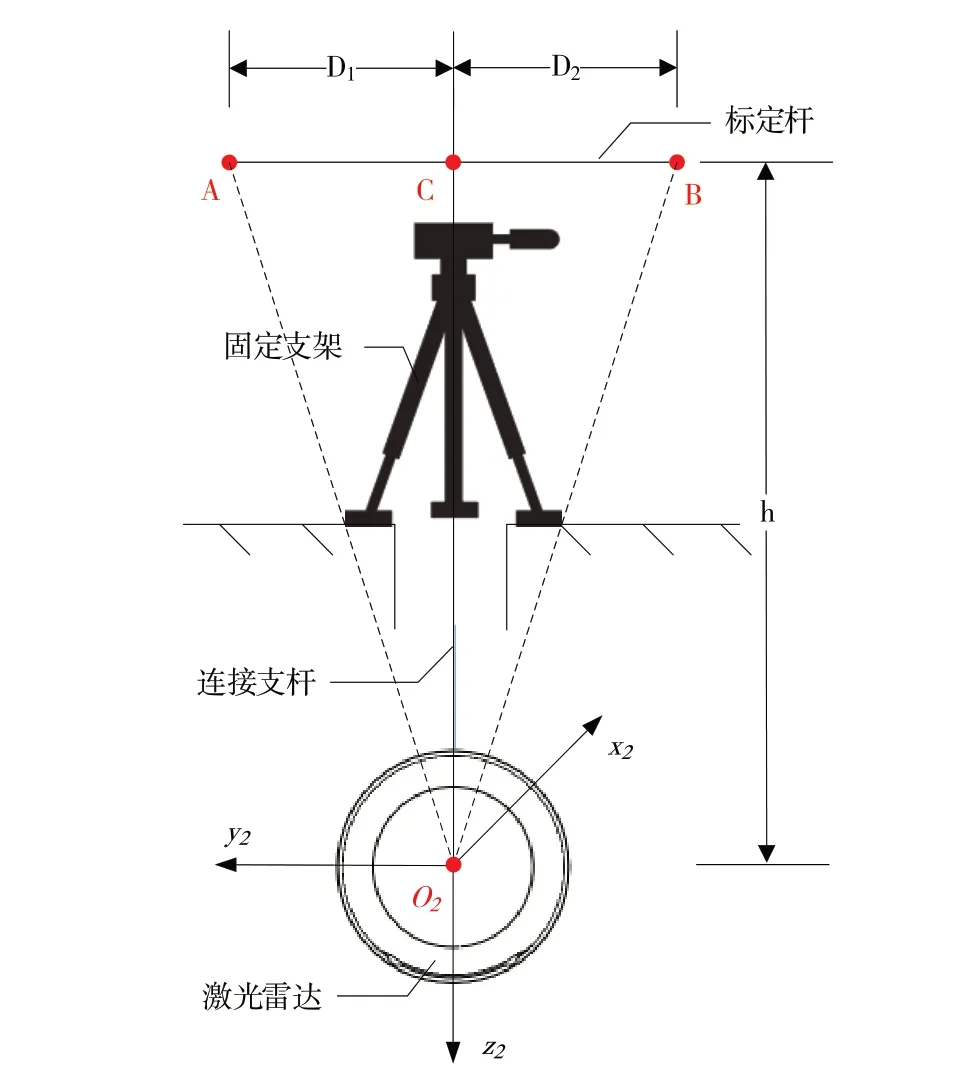
Fig.11 Diagram of coordinate system transformation图11 坐标系转换示意图
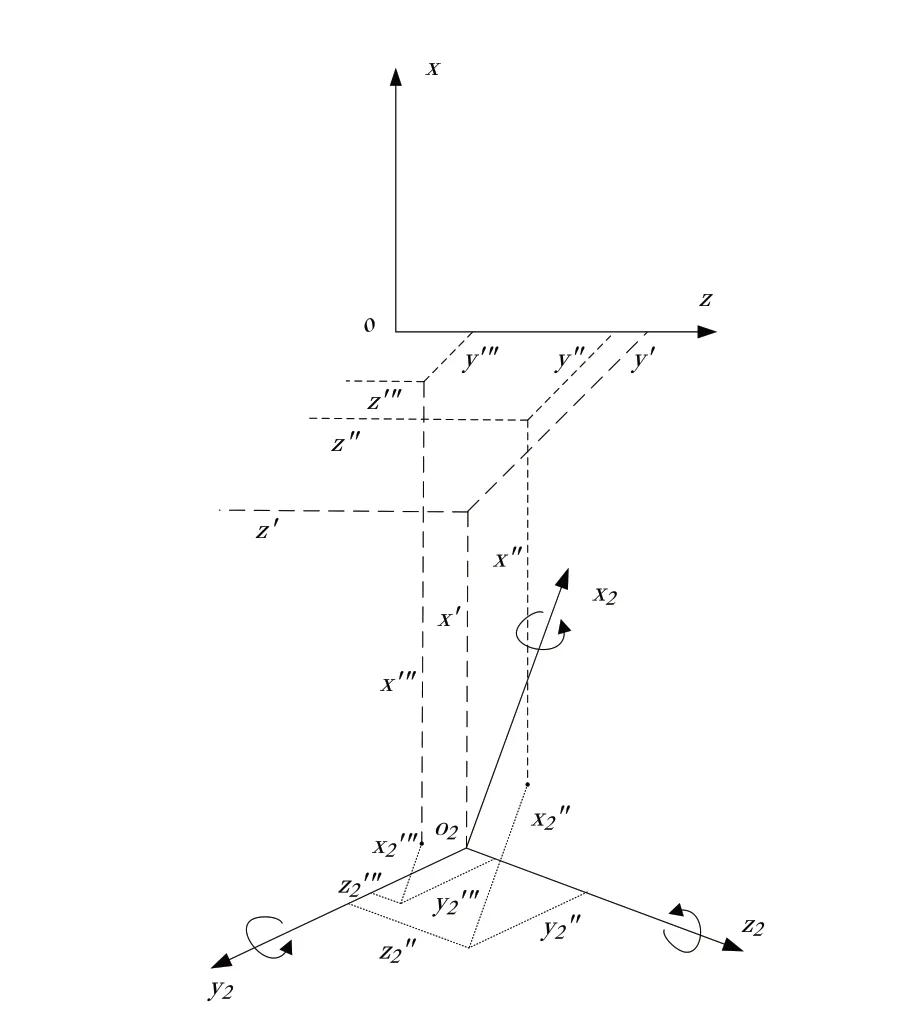
Fig.12 Bursa transformation model with 7 parameters图12 布尔莎七参数变换模型
按最小二乘法对多个公共点求解转换参数时,存在如下观测方程:

式(5)可转化为误差方程:

设观测值等权观测,则PLΔx=E,法方程为:

从而变换参数为:

通过变换参数,便可利用七参数将UCDS 三维坐标系下的三维数据转换为CGCS2000国家大地坐标。
3 可行性分析
为了验证UCDS-3D 系统的可行性和应用性,模拟实验进行数据采集、转换及预处理,并对实验获取的三维点云数据进行精度评价。
3.1 数据采集
采用一个大型纸箱(规格:2m×1m×1m)模拟地下空间场景,两个小型纸箱(规格:0.49m×0.29m×0.52m,0.54m×0.42m×0.13m)增加模拟场景的复杂度。如图13所示,连接支杆与激光扫描探头组合置于固定支架上,距离地面大约2m,探头位于大型纸箱中,传输线与控制器相连接进行数据采集。
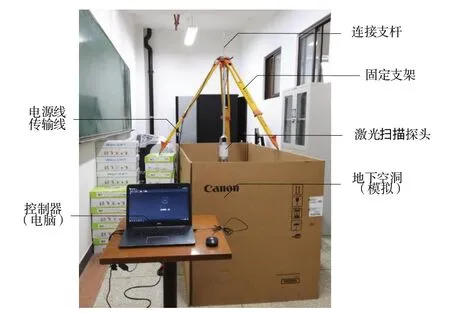
Fig.13 Simulation experiment scene图13 模拟实验场景
由于实验设备和模拟场景受客观条件限制,一次只能扫描局部场景。因此,需要从两个方向进行扫描,第一个方向扫描旋转角从0°开始、间隔3°旋转扫描,每次旋转后采集数据5~7s,共耗时约6min,获取数据文件61 个,数据点52 182 个;第二个方向扫描将设备向后移动0.5m,扫描旋转角从0°开始、间隔3°旋转扫描,共耗时约6min,获取数据文件61个,数据点52 460个。
3.2 数据转换及预处理
将两个方向采集的数据文件夹导入UCDS-3D-Data Conversion 软件后输出三维点云数据文本文档。表3 为部分数据转换前后比较。其中,转换前参数包含激光雷达获取的夹角、距离值、信号值和姿态系统获取的旋转角,转换后参数包含对应点的x值、y值、z值。
数据转换后,通过点云处理软件查看数据情况,图14(a)为第一个方向扫描三维点云数据,图14(b)为第二个方向扫描三维点云数据。
由图14 的三维点云数据可见,由于激光雷达会采集目标区域内所有数据,会造成数据冗余。同时,在采集过程中会受到采集设备自身精度、机械振动、周围环境等因素干扰,产生一些小振幅噪声点和稀疏离群点。因此,首先需要对点云数据进行去噪处理,使目标区域表面光顺平滑,保持采样表面原有的拓扑几何特征[18],如图15所示。
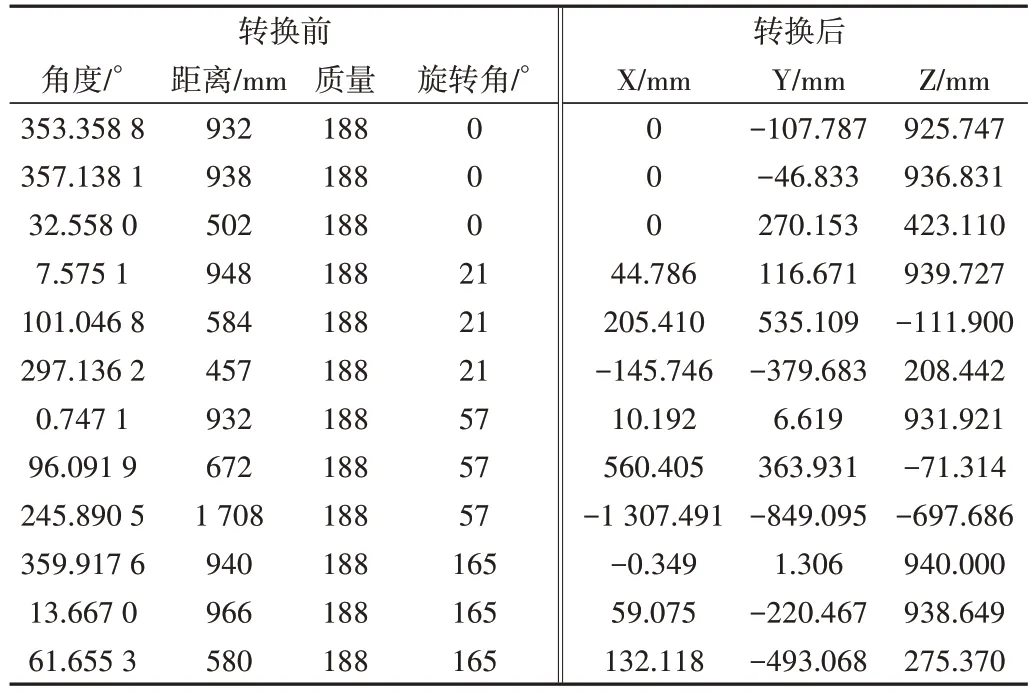
Table 3 Comparison of data before and after conversion表3 数据转换前后比较
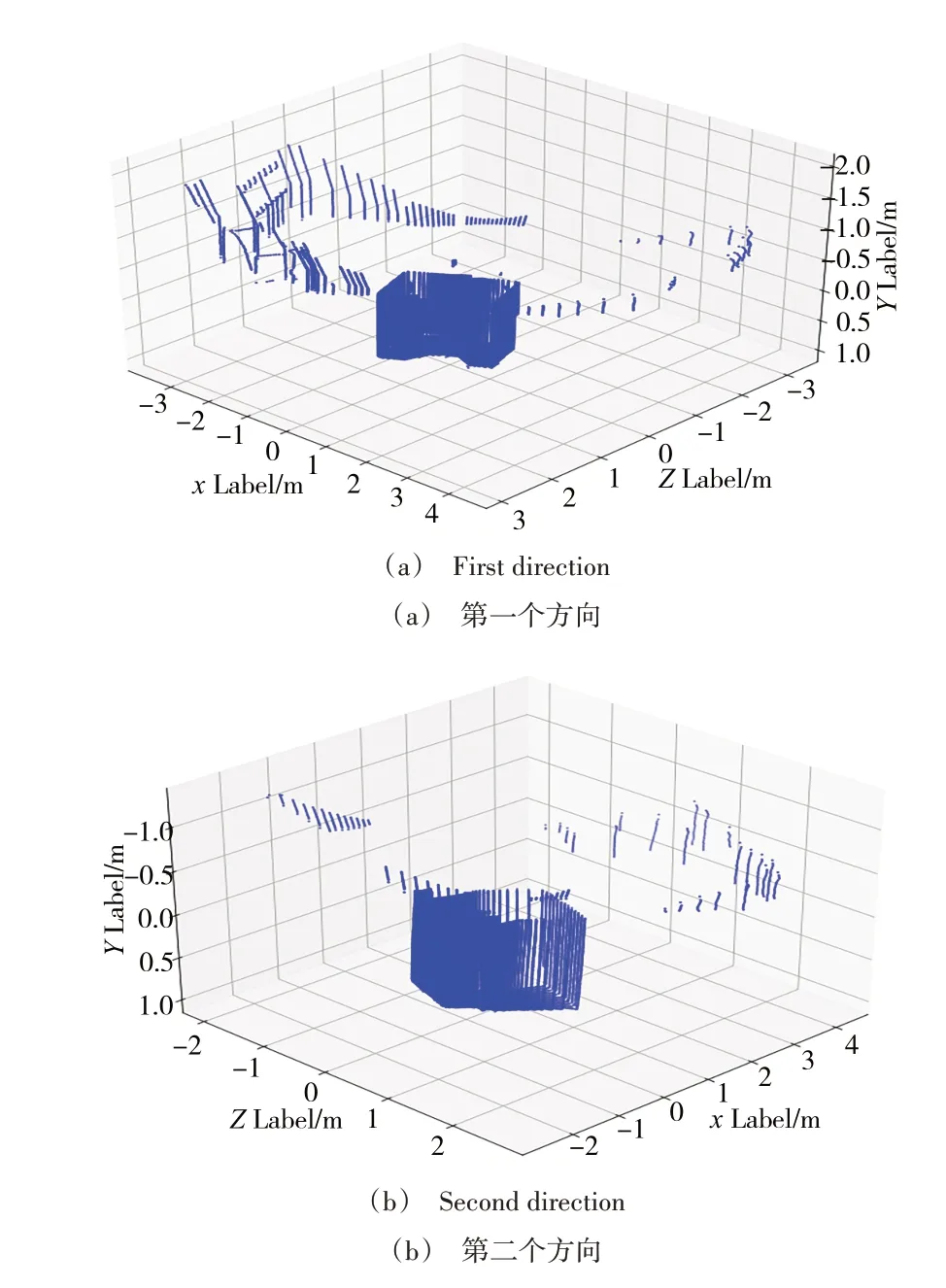
Fig.14 3D point cloud data of simulation scene图14 模拟场景三维点云数据
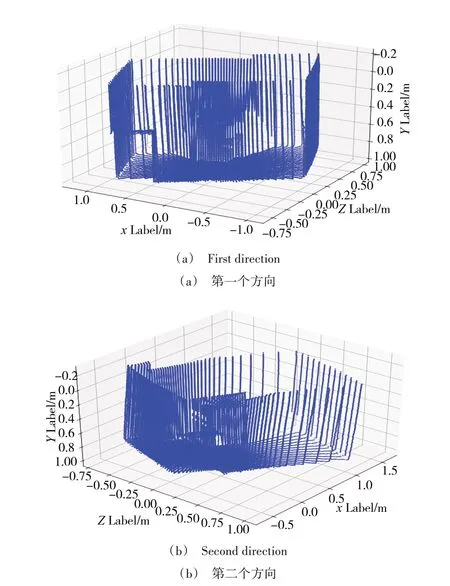
Fig.15 Denoising results of 3D point cloud data in simulated scene图15 模拟场景三维点云数据去噪结果
由于每个方向基于特征匹配算法扫描得到的三维点云数据均具有独立坐标系,包含多视点特性,不便于进行数据处理和分析。因此,首先需要先将两个方向去噪后的三维点云数据进行配准,并将三维点云数据的局部几何信息(例如曲率、法向量、邻近点密度等)作为特征,寻找测试点集与参考点集的对应关系,结合迭代最近点技术完成配准操作,得到模拟场景三维点云数据,详细配准细节见参考文献[19-22],配准过程如图16所示。
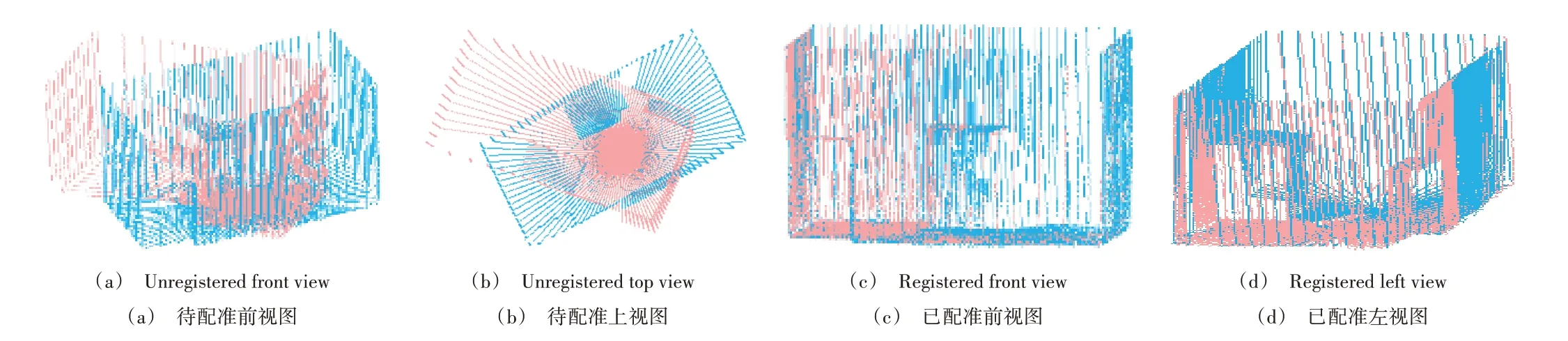
Fig.16 3D point cloud data registration process of simulated scene图16 模拟场景三维点云数据配准过程
3.3 精度评价
为进一步检测三维点云数据精度,在现场用钢尺实测边长与点云数据进行比较。中误差m是衡量观测精度的一种数字标准,绝对值愈小表示精度越高,计算公式如下:

式中,Δ 为测量值与实测值间的误差,n为观测次数。由表4 可知,设计的UCDS-3D 系统获取地下空洞三维数据的中误差为0.003 5m,基本满足误差精度要求。
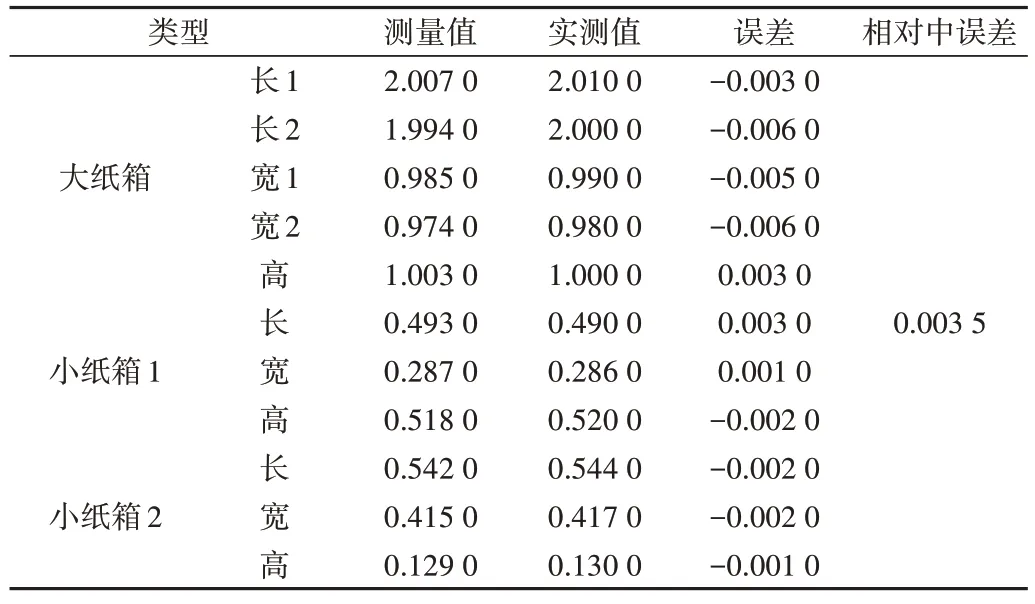
Table 4 Size comparison of edge between solid and 3D data表4 实体与三维数据的边长尺寸对比 (m)
3.4 实地试验
为了验证地下空洞三维探测系统在实际复杂环境中的效果,将系统应用于实际环境(如图17)中进行试验。
图18 为探测端采集地下空间的照片,扫描端耗时约7min,获取数据文件68 个,数据点54 929 个,经转换后如图19(a)所示,并运用PCL 的上采样算法对原始数据进行处理,如图19(b)所示。

Fig.17 Actual scene of underground cavity图17 地下空洞实际场景
4 结语
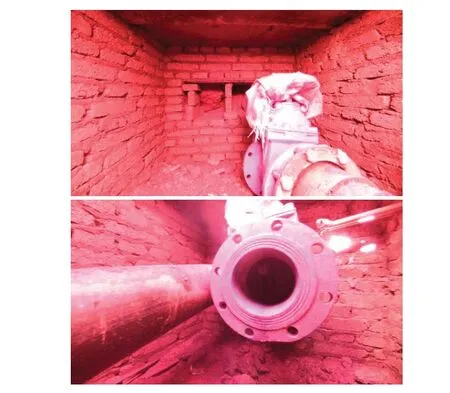
Fig.18 Shooting scene map at detection end图18 探测端拍摄场景
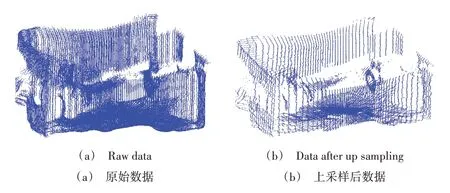
Fig.19 3D point cloud data of actual scene图19 实际场景三维点云数据
本文提出一套地下空洞三维探测系统,能够精确勘探地下空洞的空间形态、体积、空洞走向等信息,为地质设计、空洞治理和工程施工提供了可靠的基础资料。系统首先通过UCDS-3D 地下空洞三维数据探测设备采集地下空洞数据;然后利用Data Conversion 软件对数据进行转换、点云去噪、配准等处理;最后采用布尔莎七参数变换模型将地下空洞的三维点云数据转换至CGCS2000 国家大地坐标系,以便于融合测绘、地质等数据信息。
实验结果表明,系统精度高、稳定可靠、廉价实用、结构简易,但由于测试设备不完善且受实际场地限制,只进行了可行性实验,后续将优化系统软、硬件设备,在真实场景中充分发挥扫描端与探测端的优势。