某车自动紧急制动系统可靠性分析
2023-01-06周忠贺
刘 涛,周忠贺,迟 霆
某车自动紧急制动系统可靠性分析
刘 涛,周忠贺*,迟 霆
(中国第一汽车集团有限公司 智能网联开发院,吉林 长春 130013)
自动驾驶测试场景具有无限丰富、极其复杂、不可穷尽的特点,传统的测试手段难以对自动驾驶系统安全性进行较为全面的评估。仿真测试具有效率高、成本低、测试过程安全等特点,现已成为自动驾驶测试和验证的重要手段,测试和量化自动驾驶系统的可靠性,理论上需要完成所有场景的测试,但是完成对所有的场景的穷举和测试并不现实。基于仿真测试场景,利用高效的响应面构造方法及抽样方法对自动驾驶系统进行评估为研究自动驾驶系统的可靠性提供了一种新的方向和思路。本文基于一汽集团某车型自动紧急制动(AEB)算法,搭建仿真测试系统,建立了直道CCRm仿真场景,并以前方匀速行驶车辆追尾测试(CCRm)为例,运用克里金法建立了场景变量与输出之间的高质量响应面,通过方差法量化了场景变量的敏感度;并基于合肥某条高架道路车速分布,结合拉丁超立方抽样,得到直道CCRm场景下自动紧急制动系统作用时的两车最小相对距离的分布以及自动紧急制动系统的失效概率,研究结果可为自动紧急制动系统评估提供有力支撑。
仿真测试;自动紧急制动(AEB)系统;拉丁超立方抽样;响应面;敏感性;可靠性
当前越来越多配备高级驾驶辅助系统(Adv- anced Driving Assistance System, ADAS)的车辆上路行驶,在驾驶安全性和舒适性等方面有了很大的提升。在开发自动驾驶系统过程中很重要的一个方面是对其功能的验证和确认,为了验证ADAS系统的故障率,需要进行至少10亿个小时的实车测试。进行这么长时间的实车测试无论是出于时间方面的考虑还是安全方面的考虑都是不现实的,因此,为了加快对ADAS系统的评估,在虚拟仿真测试方面研究越来越普遍和重要[1]。自动驾驶虚拟仿真测试是以数学建模的方式将自动驾驶的应用场景进行数字化还原,建立尽可能接近真实世界的系统模型,通过软件进行仿真测试便可达到对自动驾驶系统及算法进行测试验证的目的。相较于传统的实车测试,仿真测试具有场景覆盖度高、测试过程安全、测试效率高等优势[2]。当前对自动驾驶系统评价方法都是基于场景的测试,并采用一些指标项用来评估自动驾驶系统。运用仿真测试技术可以得到概率结果,因此已没有必要驾驶10亿个小时来对自动驾驶系统进行评估[3]。
自动紧急制动(Autonomous Emergency Bra- king, AEB)系统是智能驾驶辅助系统的主要功能之一,通过安装在车辆前方的雷达、摄像头等传感器检测潜在的碰撞风险,提前警示驾驶员制动,并在必要时自动制动,防止碰撞的发生或最大限度降低碰撞的伤害[4],能够有效减少甚至避免交通事故发生,保证驾驶员及行人安全。AEB系统的典型测试场景包括前方静止车辆追尾测试(Car- to-Car Rear Stationary, CCRs)、前方匀速行驶车辆追尾测试(Car-to-Car Rear Moving, CCRm)、前方减速行驶车辆追尾测试(Car-to-Car Rear Braking, CCRb)和路口转弯迎面来车测试(Car-to-Car Front turn-across-path, CCFtap)等。本文选取直道CCRm测试场景对一汽某车型配备的AEB系统进行评估。
1 理论基础
1.1 克里金响应面法
响应面法(Response Surface Methodology, RSM)由Box和Wilson提出,是一种利用统计学的综合实验技术,用来处理复杂系统的输入变量和系统响应之间的转换关系,运用响应面函数来拟合原有的隐式极限状态函数,响应面法在化学、生物学、食品学以及工程学等诸多领域有着广泛的应用。克里金法(Kriging)是一种高阶响应面算法,其基本思想是通过计算某点邻域中函数的已知值的加权平均值来预测给定点处的函数值,是一种依据协方差函数对随机场进行空间建模和预测的回归算法,具有良好的非线性效果,是最常用的空间插值算法[6]。其计算的基本原理为

式中,x为第个位置处的真实测量值;(0)为任意位置0的估计值;λ为第个位置处的测量值的未知权重,可以通过构造拉格朗日条件值计算:

式中,(x,0)为变差函数值,表示x与x的距离;为拉格朗日常数。变差函数的计算公式为

式中,()为实验数据点对数据。
对于如何评估响应面拟合的质量问题,MON- TGOMERY等人[7]提出了一种广义的决定系数(Coeffificient of Determination, CoD)来评估模型的表现质量,其基本定义如下:


1.2 敏感性分析
敏感性分析是研究系统模型中输入变量的不确定性对系统输出响应量的影响,Saltelli等[5]运用基于方差的分析方法来量化此影响。假设一个系统的输出是给定的个随机输入参数集X的函数,即
=(1,2,…,X) (7)
一阶灵敏度指数的定义为
式中,()为模型输出的无条件方差;(|)模型输出仅由X引起的方差。由于一阶灵敏度指数只测量每个变量的解耦影响,所以需要扩展高阶耦合项,因此,总效应敏感性指标被引入。
式中,(|X)定义为模型输出除了X外由其他所有模型输入参数引起的方差。通过灵敏度分析探索设计空间,所获得的变量敏感度可能有助于减少变量的数量。在定义AEB系统的输出后,利用基于方差的灵敏度分析技术,研究分析CCRm场景变量对系统输出的影响大小。
1.3 可靠性分析
可靠性一般是指产品、系统等在使用时,在规定的时间内,无故障执行其功能的能力或可能性,在强调定量时,可靠性就是可靠度,即产品设备或系统在给定条件下和规定时间内完成额定功能的概率[10]。对一个系统进行可靠性分析首先要指定随机输入变量及其属性,例如分布类型。一个关于随机变量的函数()定义为
()被称为极限状态函数,()=0表示从安全状态到失效状态的过渡,称为故障面。所有和变量相关的域R被划分为安全域和失效域,失效域D定义为
D={∈R|()<0} (11)
失效概率P为落入失效域里的概率为
P=[:∈D]=[()<0] (12)
失效概率可以通过失效域D上所有随机变量的联合密度的积分求得
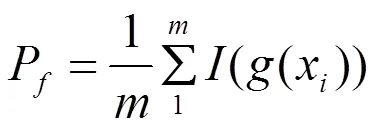
在式(13)中引入了一个指示函数,如果检查随机参数集的系统处于失效状态,则采用值1,否则为零。即
将该指标设置为故障域上的积分后,可以在不影响积分值的情况下改变积分域:
蒙特卡洛模拟是一种简单生成一个随机向量x的样本,将每个样本作为输入参数集提交给被检查系统的仿真,并计算极限状态函数,然后可以通过计算指标样本的平均值,作为期望值的估计量,从而计算失效概率,进而量化系统的可靠性。
运用克里金法构造场景变量和系统输出之间的高质量响应面并结合敏感性分析技术以及基于概率的可靠性分析方法,对AEB系统进行可靠性分析提供了基础。
2 仿真测试系统搭建
2.1 车辆模型搭建和集成
仿真测试系统的搭建主要包含车辆模型的搭建和集成、传感器模型的搭建以及控制模型的集成等方面。ASM Vehicle Dynamics是由dSPACE公司开发的车辆动力学实时仿真模型,是一种开放式的Simulink模型。本文以ASM的13自由度车辆模型为基础,根据一汽某开发车型整车参数搭建车辆动力学模型,用于仿真各种工况下的车辆动态响应,其中车辆轮胎规格为215/55 R18,其它基本参数如表1所示。在Simulink环境下,将车辆的位姿信息输入到场景模型,同时将车速、方向盘转角、油门及制动踏板开度等信息输入到控制模型,实现车辆模型集成。
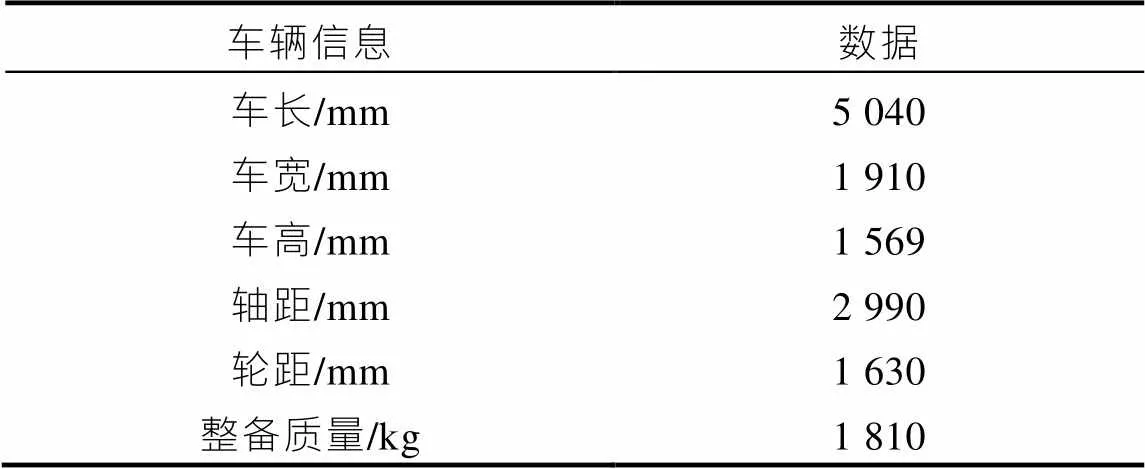
表1 车辆基本参数
2.2 传感器模型搭建
目前传感器模型主要分为三种,第一种为物理级传感器模型,可直接仿真传感器能够接收到的原始信号,如光线、电磁波、超声波等;第二种为信号级传感器模型,直接仿真控制电控嵌入式系统中的数字处理芯片的输入单元;第三种为真值级传感器模型,即直接输出传感器模型探测范围内的目标真值信息[12]。本文主要是通过仿真测试验证AEB控制算法,因此,选择真值级传感器模型。
搭建真值级传感器模型,需要确认试验车辆所搭载传感器的探测距离、水平视场角、垂直视场角、盲区距离等外特性模型参数,依照参数搭建模型。本文中试验车辆采用毫米波雷达传感器,根据实车搭载的毫米波雷达参数,设定传感器模型的探测距离为210 m,水平视场角为±45°,垂直视场角为±8°,盲区距离为0.5 m。
2.3 场景模型
自动驾驶场景是自动驾驶汽车行驶场合与驾驶情景的有机组合,由静态场景和动态场景两部分构成。其中静态场景由具备静态特征的道路、交通设施、天气、光照等组成;动态场景由具备动态特征的交通参与者组成[16]。
静态场景根据需求的道路设施要素进行搭建,具体包括路网拓扑结构、道路几何特征、道路表面材质、车道线、路面标识、交通灯牌、街边建筑等,组合上述要素形成道路状况、道路周围环境、道路曲率半径等静态场景。
在搭建好的静态场景基础上,布置交通参与者,并设置其初始状态,如位置、角度、速度等;之后设置各交通参与者的交互动态,赋予其满足测试场景要求的行为能力,如制动、加速、转向、变道等。
2.4 控制模型集成
控制模型(即AEB算法模型)在Simulink环境下与其它模型进行集成。其中车辆模型向控制模型输入本车速度、加速度、方向盘转角、油门及制动踏板开度等信息;传感器模型向控制模型输入目标物体与本车的相对距离、相对速度、相对角度等信息。控制模型将根据上述输入信息判断是否激活AEB功能并向车辆模型输出期望制动减速度,最终形成系统闭环。如图1所示。
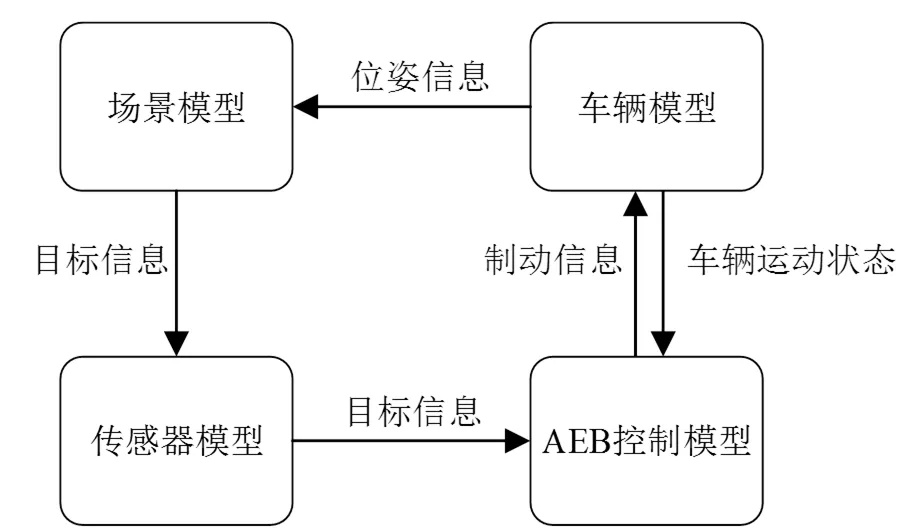
图1 AEB闭环仿真测试系统
3 仿真测试与实车测试
3.1 仿真测试
根据C-NCAP管理规则的定义,对直道CCRm功能场景描述为:自车以一定的偏置沿直线道路匀速行驶,目标车与自车在同一车道并在自车前沿直线匀速行驶[11]。完成仿真测试系统的搭建后,建立直道CCRm虚拟仿真场景,如图2所示,其中后车代表自车,前车代表目标车。
本文CCRm测试场景中定义的场景变量参数为自车速度、目标车(前车)速度和偏置率的绝对值,偏置率定义为自车与目标车重叠部分占自车的百分比,重叠定义的参考线是自车的中心线,在100%重叠的情况下,自车和目标车的中心线对齐[11]。在AEB系统运行设计域内,针对直道CCRm场景参数选取不同值组合设计进行仿真测试,输出结果为两车最小相对距离,若自车和目标车没有发生碰撞,两车最小相对距离为正;若发生碰撞,则两车最小相对距离为负,同时表明AEB系统在此工况下失效。根据一汽某车型AEB系统的设计功能规范及运行设计域,通过搭建的仿真测试系统累计进行了320项直道CCRm场景的仿真测试,并对仿真结果进行相应提取和处理。

图2 直道CCRm仿真测试场景
3.2 实车测试
在海南热带汽车试验场,分别进行了如下三项CCRm实车试验如图3所示,分别为
(1)本车以30 km/h的速度匀速行驶,目标车在本车前方以20km/h的速度匀速行驶,工况简写为S30_T20;
(2)本车以40 km/h的速度匀速行驶,目标车在本车前方以20km/h的速度匀速行驶,工况简写为S40_T20;
(3)本车以60 km/h的速度匀速行驶,目标车在本车前方以20km/h的速度匀速行驶,工况简写为S60_T20。

图3 AEB实车试验
以上三项实车测试的偏置率都为0,自车与目标车初始相对距离都为100 m,将实车试验结果与仿真结果进行对比,验证仿真测试的准确性。以S60_T20工况为例,图4为实车测试和仿真测试对比曲线。
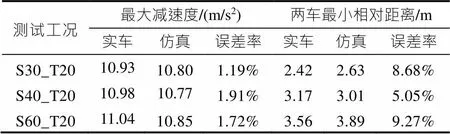
表2 CCRm场景实车试验与仿真测试结果

图4 S60_T20工况数据曲线
4 响应面生成及场景变量敏感性分析
响应面的构造方法一般有数值拟合法、多项式回归法、最小移动二乘法、径向基函数法和克里金法等。克里金法具有计算效率高、时间短、响应面拟合效果好、结果准确性高等特点。本文以自车速度和目标车速度、偏置率的绝对值三个场景变量作为输入参数,以仿真结果——两车最小相对距离作为输出响应,基于克里金法构造的自车速度、目标车速度——两车最小相对距离的响应面如图5所示。
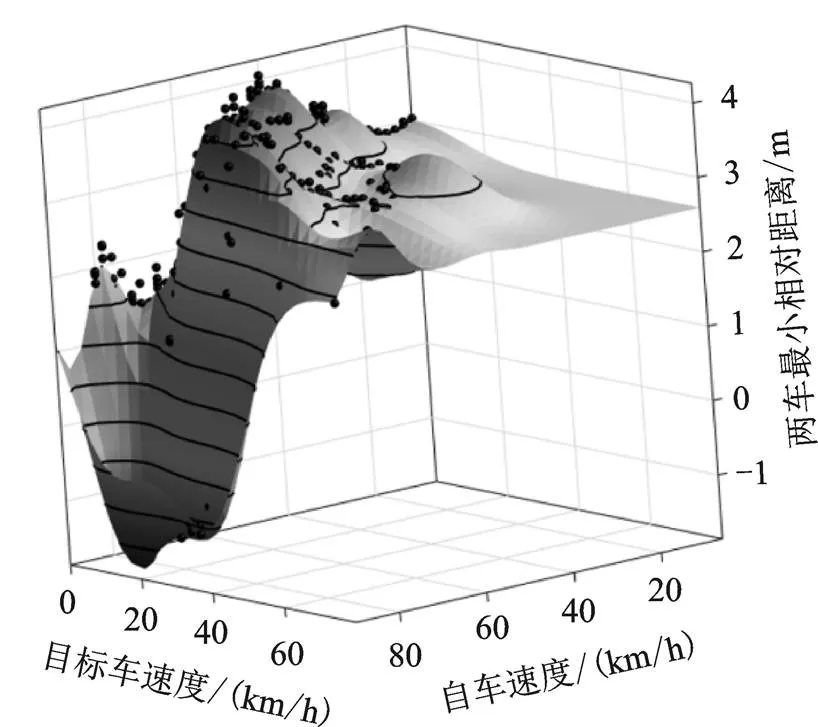
图5 基于仿真测试结果生成的响应面
运用1.2节基于方差的分析方法得出场景参数敏感性分析结果如表3所示。
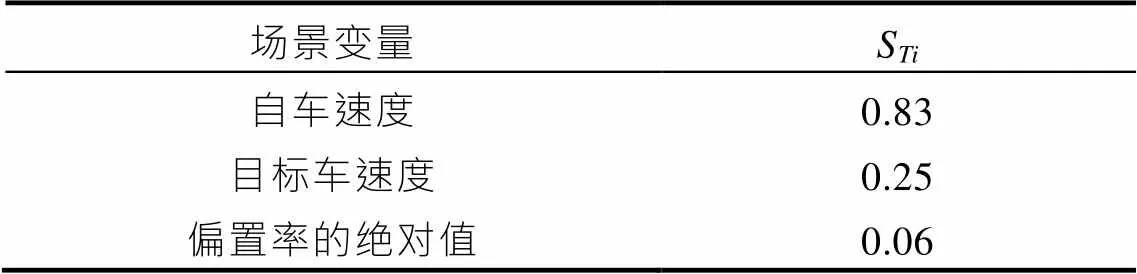
表3 场景参数敏感性分析结果
由表3可知,对于CCRm场景,自车速度的敏感度最大,目标车速度中等,偏置率的绝对值敏感度最低。这意味着,自车速度和目标车速度这两个参数是最重要的,对系统输出的影响也是最大的。由于偏置率的绝对值对总方差的贡献较低,后续的分析与研究过程将忽略偏置率绝对值的影响。
场景参数自车速度和目标车速度作为输入与两车最小相对距离作为输出构造出的响应面的CoP系数为97%,能够准确反映出场景参数和输出间的响应关系。从构造的响应面上抽取10个样本点结果进行仿真测试,以此来验证响应面的精度,响应面生成结果及仿真结果对比见表4(偏置率绝对值采用0.25)。表4的验证对比表明克里金法构造的响应面结果与仿真结果具有较好的对应关系。
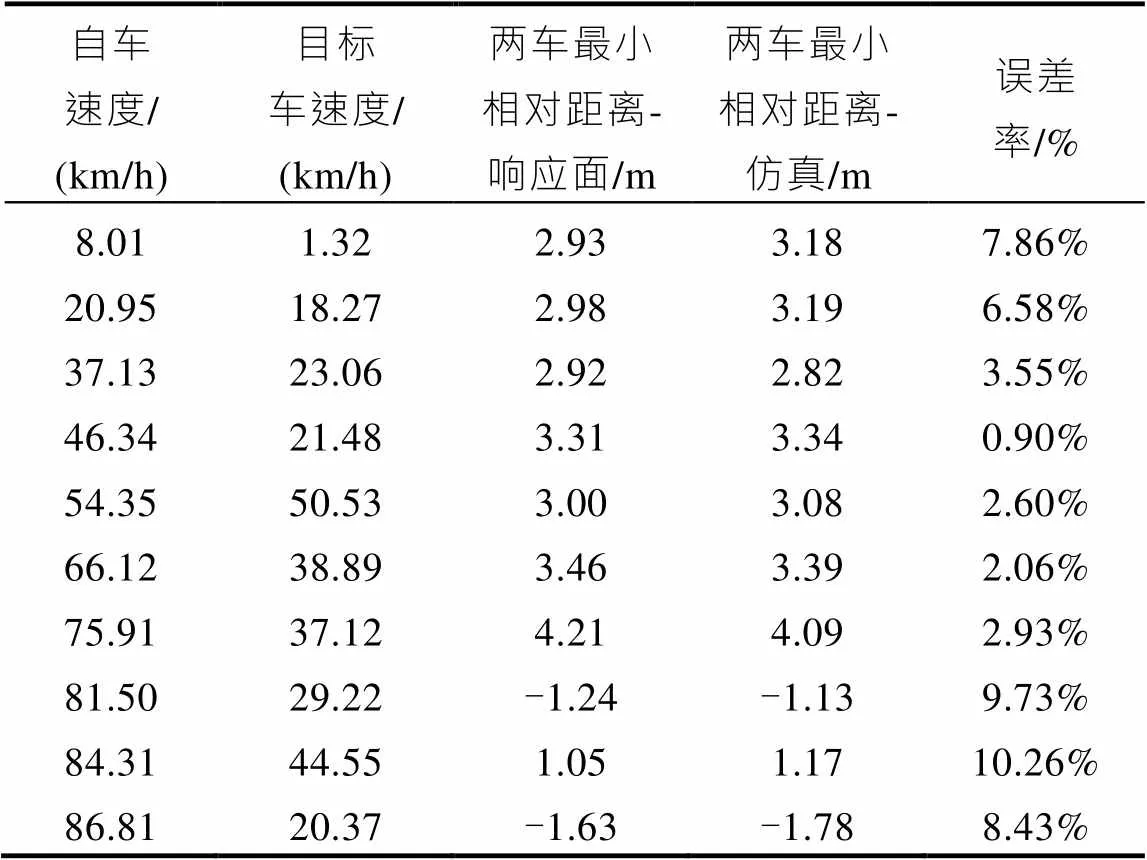
表4 仿真与响应面法结果对比
5 AEB系统可靠性分析
进行系统可靠性分析要明确场景参数分布,在参数敏感性分析阶段已经得知偏置率的绝对值敏感度很低,可以忽略其影响,在此偏置率的绝对值分布采用值为0.25的常数。目前国内外很多学者已对各种道路的车速分布特性进行了大量相关的研究,Maurya等[12]通过对双向四车道的混合交通流进行调查发现交通量高于600 veh/h时车速服从正态分布;阎莹等[13]研究车速分布与交通安全关系时,发现高速公路的断面运行车速服从正态分布。本文采用合肥某条高架道路的速度分布作为自车车速和目标车车速的概率密度函数,车速定义为服从均值48.71,标准差7.45的正态分布的随机参数[14]。
拉丁超立方抽样是蒙特卡洛法的一种,它利用分层的原理在设计空间随机抽样,一方面可以保证抽样点不聚集,具有较好的空间覆盖性,另一方面又可以提高抽样效率。基本步骤为
(1)根据需要抽样的样本点,将每个设计变量的空间划分为份;
(2)在设计变量的每个子域内进行等概率的随机抽样一次,共得个数据;
(3)将各个设计变量的个数据随机匹配为个样本点(其中每个因素的每个水平只使用1次)[15]。
本文采用的抽样策略为拉丁超立方抽样的样本结果如图6所示。对于AEB系统,其触发条件之一为自车速度大于目标车速度,故将该条件设置为限制条件。两车最小相对距离分布如图7所示。
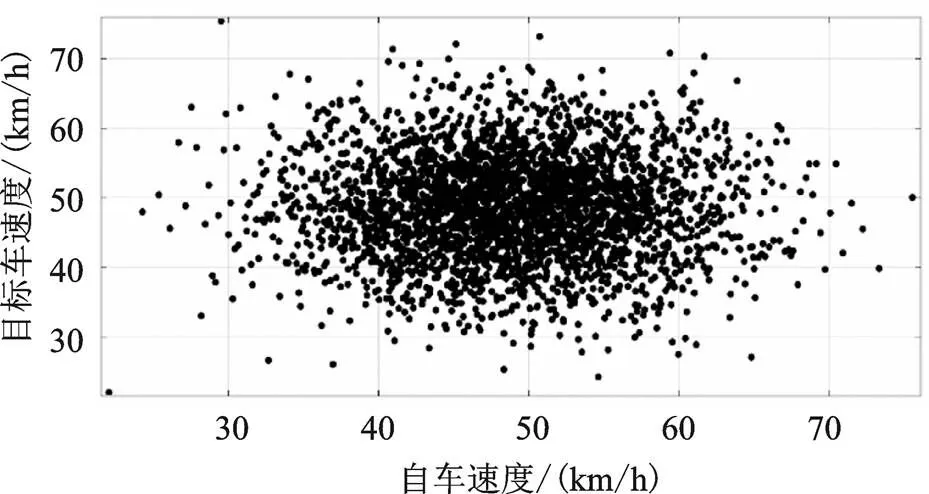
图6 抽样样本
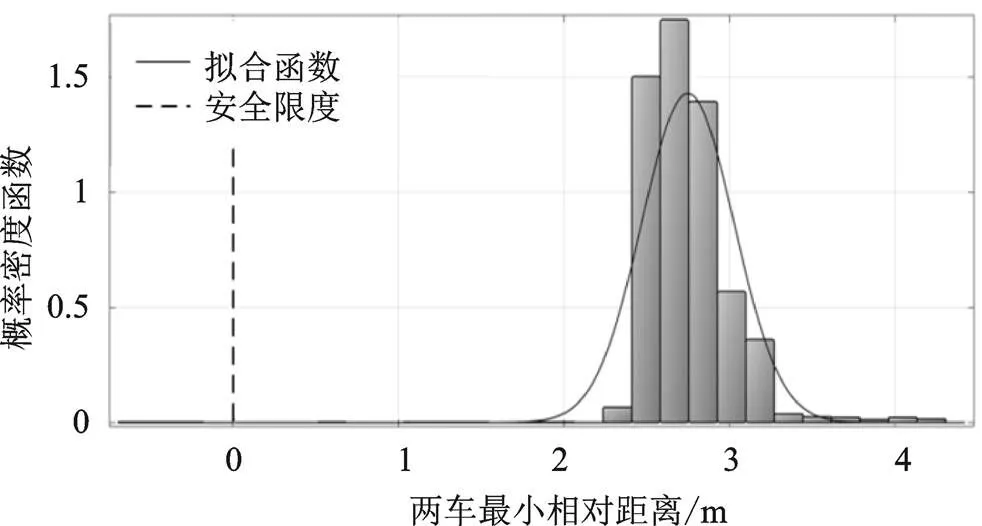
图7 两车最小相对距离概率密度函数
对结果进行分析处理表明,两车最小相对距离的概率密度函数大致服从均值为2.75,标准差为0.28的正态分布。AEB系统失效形式定义为两车最小相对距离小于0,即两车发生碰撞。对于采用合肥某条高架道路速度分布的工况,针对直道CCRm测试场景,AEB系统的失效概率为1.923× 10-7,结果表明对于该类测试场景,AEB系统具有较高的可靠性。
6 结束语
本文通过搭建仿真测试系统,建立了直道CCRm仿真场景,并将仿真测试结果和实车测试结果进行了对比,验证了仿真测试的精度。运用克里金法建立了场景变量与输出之间的高质量响应面,并通过方差法量化了场景变量的敏感度。基于合肥某条高架道路车速分布,结合拉丁超立方抽样,得到直道CCRm场景下AEB系统作用时的两车最小相对距离的分布以及AEB系统的失效概率,是一种新的测试方法的探索。分析结果表明在AEB系统运行设计域内,针对直道CCRm场景AEB系统具有极高的可靠性,为AEB系统评估及改进等提供定量支撑。
[1] BENGLER K,DIETMAYER K,FARBER B,et al.Three Decades of Driver Assistance Systems:Review and Future Perspectives[C]//IEEE Intelligent Transporta- tion Systems Magazine.Piscataway:IEEE,2014:6-22.
[2] 张帆,鲍世强,王忆源,等.中国自动驾驶仿真技术研究报告(2019)[C]//国际智能网联汽车技术年会.北京:中国汽车工程学会,2019.
[3] ZOFKA M R,KLEMM S,KUHNT F,et al. Testing and Validating High Level Components for Automated Driving:Simulation Framework for Traffic Scenarios [C]//IEEE Intelligent Vehicles Symposium.Piscata- way:IEEE, 2016.
[4] 周文帅,李妍,王润民,等.自动紧急制动系统(AEB)测试评价方法研究进展综述[J].汽车实用技术,2020, 45(18):34-40,49.
[5] SALTELI A. Global Sensitivity Analysis:the Primer [M].Manhattan:John Wiley,2008.
[6] 田贺举.Kriging-GRNN高阶混合响应面模型构建方法及仿真应用[D].广州:广东工业大学,2019.
[7] MONTGOMERY D C,RUNGER G C.Applied Statis- tics and Probability for Engineers[M].5th Edition. Hoboken:Wiley,2010.
[8] MOST T, Will J. Metamodel of Optimal Prognosis- An Automatic Approach for Variable Reduction and Optimal Meta-model Selection[C]// Weimar Optimi- zation and Stochastic Days 5.0.Weimar:DYNARDO- Dynamic Software and Engineering GmbH,2008.
[9] 袁志发,贠海燕.试验设计与分析[M].2版.北京:中国农业出版社,2007.
[10] 詹军,董学才,洪峰,等.智能汽车传感器实时功能模型及验证[J].汽车工程, 2019,41(7):731-737,743.
[11] 中国汽车技术研究中心.C-NCAP管理规则(2021年版)[Z].天津:中国汽车研究中心,2021.
[12] MAURYA A K,DEY S,DAS S.Speed and Time Head- way Distribution under Mixed Traffic Condition[J]. Journal of the Eastern Asia Society for Transportation Studies,2015(11):1774-1792.
[13] 阎莹,王晓飞,张宇辉,等.高速公路断面运行车速分布特征研究[J].中国安全科学学报,2008,18(7):171-176.
[14] 朱建全.基于路段交通流状态的车辆燃油消耗的测算与分析[D].合肥:合肥工业大学,2017.
[15] 张疆平,关英俊,贾成阁,等.基于自适应响应面法的数控铣床尺寸优化[J].机床与液压,2016(44):142-148.
[16] JIANG L J, HE J P, LIU W G, et al. Study on the Test Scenario of Automatic Emergency Braking System[J]. Auto Engineering,2014(1):39-43.
Reliability Analysis of Autonomous Emergency Braking System for a Certain Car
LIU Tao, ZHOU Zhonghe*, CHI Ting
( Intelligent Connected Vehicle Development Institute, China FAW Group Company Limited, Changchun 130013, China )
Autonomous driving test scenarios are infinitely rich, extremely complex and inexhaustible, it is difficult for traditional testing methods to comprehensively evaluate the safety of autonomous driving system. Simulation test has the characteristics of high efficiency, low cost and safe test procedure, and has become an important means for autonomous driving test and verification, to test and quantify the reliability of the autonomous driving system, in theory, it is necessary to test all the scenarios, but it is not realistic to exhaust and test all scenarios. Based on the autonomous emergency braking (AEB) algorithm of a certain car, the simulation test system is built, and straight CCRm simulation scenarios are established. This paper takes the Car-to-Car Rear Moving test (CCRm) simulation scenario as example, the Kriging method is used to establish high-quality response surface between scenario variables and system output , and the sensitivity of the scenario variables is quantified through the variance method. Based on the speed distribution of an elevated highway in Hefei, combined with Latin hypercube sampling, the distribution of the minimum relative distance between two vehicles when the autonomous emergency braking system acts under the straight CCRm scenario and the failure probability of the autonomous emergency braking system are obtained. The research results can provide strong support for the evaluation of the autonomous emergency braking system.
Simulation test;Autonomous Emergency Braking System; Latin hypercube sampling; Response surface; Sensitivity; Reliability
U469.5
A
1671-7988(2022)24-33-07
U469.5
A
1671-7988(2022)24-33-07
10.16638/j.cnki.1671-7988.2022.024.006
刘涛(1982—),男,博士,高级工程师,研究方向为车辆动力学及其控制,自动驾驶仿真开发与测试,E-mail: liutao1@faw.com.cn。
周忠贺(1992—),男,硕士,工程师,研究方向为自动驾驶仿真开发与测试,E-mail: zhouzhonghe@faw.com.cn。
