基于PSO-GRNN的行人跌倒检测方法*
2023-01-06刘善良王晓原王瀚卿刘亚奇
刘善良王晓原王瀚卿刘亚奇
(1.青岛科技大学机电工程学院 青岛 266000)(2.青岛科技大学智能绿色制造技术与装备协同创新中心 青岛 266000)
1 引言
随着社会和经济的发展,人口预期寿命延长,老年人数量增加,人口老龄化成为必然的趋势。老年人自身的安全防护意识不足,加之身体机能衰退,使得老年人成为跌倒行为的易发群体,跌倒是造成65岁以上老年人意外伤害和死亡的主要原因[1]。因此,跌倒的准确检测,及时的报警并救治可挽回老年人生命,避免老年人因跌倒死亡。
跌倒是指突发的、不自主的、非故意的身体位置改变,身体倒在地上或更低的平面[2],如图1所示。在人体跌倒检测研究中,根据安装在系统中的传感器的类型,将跌倒检测方法分为基于视觉的跌倒检测方法[3~4]、基于环境的跌倒检测方法[5~6]和基于穿戴设备的跌倒检测方法[7~8]。基于穿戴设备的跌倒检测方法依靠传感器测量来区分跌倒和ADLs[9],最常用的传感器有加速度计、陀螺仪、磁力仪和倾斜仪[10~11]。但目前已有的基于穿戴设备对跌倒行为辨识的确率不高。
本研究使用十轴姿态传感器采集行人跌倒和ADLs的腰部数据,选择加速度、角速度和高度作为特征参数,提出基于PSO-GRNN的跌倒检测方法有效提升辨识的准确率。通过Matlab对模型进行了验证,结果表明:基于PSO-GRNN的跌倒检测方法辨识精度较高,稳定性好。
2 数据采集及处理
本文使用十轴姿态传感器(JY901B)采集运动数据。将传感器佩戴于被测者腰部,采集被测者跌倒和ADLs行为的姿态数据。
2.1 实验设计
人体跌倒时,身体处于加速状态,加速度、角度、角速度和高度变化明显。本研究选择三轴加速度、三轴角速度、高度作为特征参数。腰部是人体力量的中心,且腰部的加速度计的跌倒检测精度更高[12]。因此,本研究以腰部为坐标原点,以正前方为Z轴正方向,根据右手法则,建立笛卡尔坐标系,如图2所示。传感器佩戴位置,如图3所示。
图3 实验设备佩戴图
将跌倒分为前侧、左侧、右侧、后侧跌倒;将ADLs分为类跌倒行为和正常行为,其中类跌倒行为包括跳跃、下蹲、上下楼梯等,这些行为在一定程度上影响跌倒检测;正常行为包括行走、跑、坐-躺、站-坐,这些行为与跌倒差异较大。
使用传感器采集行人跌倒和ADLs的三轴加速度(ax,ay,az)、三轴角速度(ωx,ωy,ωz)和高度(h)数据。招募40名大学生进行实验,并给与一定报酬。其中女性10人,160cm及以下5人。在地面放置4张90cm*200cm*1.5cm的瑜伽垫,参与者佩戴护膝,防止受伤。每位被测者重复20组各类型跌倒,10组各类型的ADLs。
2.2 数据处理
根据所采集的人体运动的三轴加速度、三轴角速度和高度,求解合加速度、合角速度和高度变化量,公式如下:
1)合加速度

2)合角速度

3)高度变化

在数据集中,4种跌倒和3种类跌倒行为各选择20个连续的数据点;6种正常行为各选择10个连续的数据点,组合形成人体不同动作数据特征图,如图4所示。
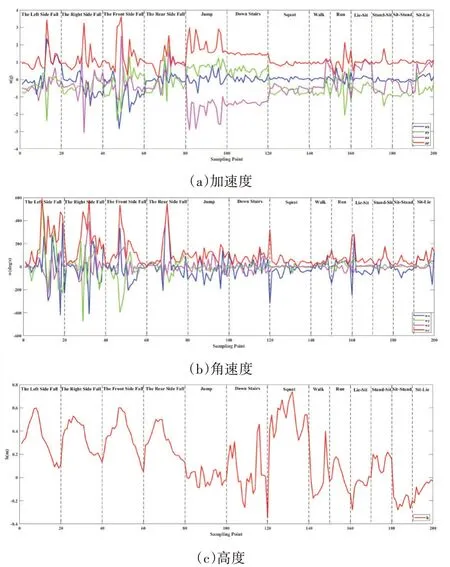
图4 人体不同动作数据特征
图4(a)为人体各运动的加速度变化图,图4(b)为人体各运动的角速度变化图,图4(c)为人体各运动的高度变化图。
在实验数据集中,选取200组特征数据点创建数据集。其中160组作为训练数据集XA,40组作为测试数据集XB,同时建立对应的标签数据YA、YB。训练集和测试集中各行为类型对应的数据个数,如表1所示。
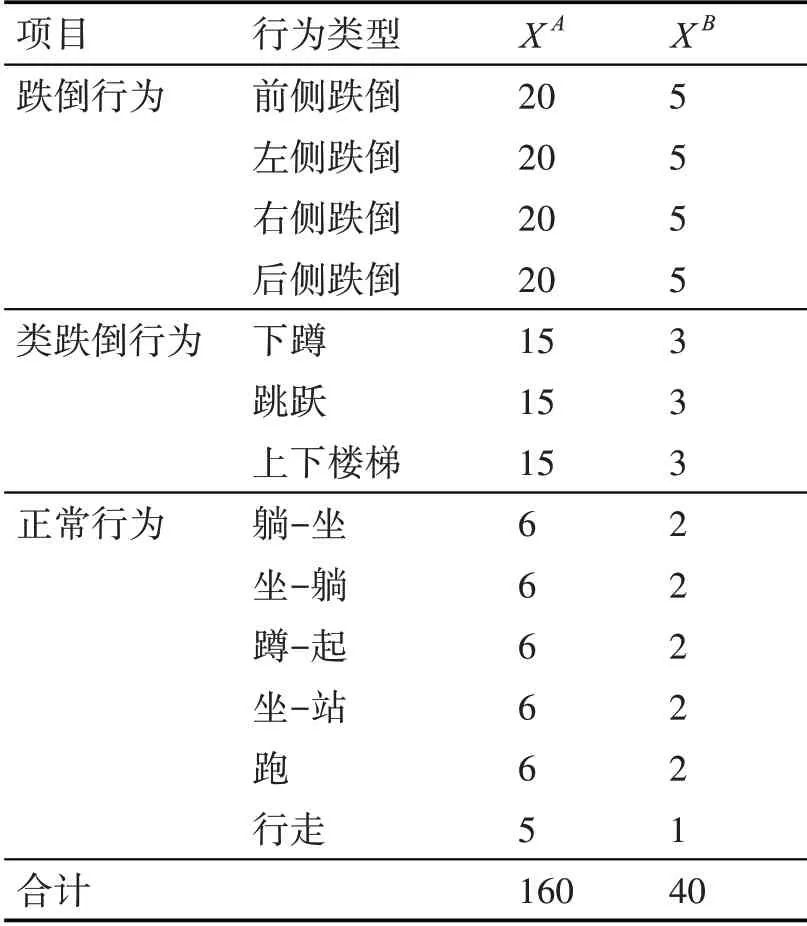
表1 各行为样本数量表
3 PSO-GRNN跌倒辨识模型的构建方法
3.1 GRNN原理
GRNN[13]由输入层、模式层、求和层和输出层构成,如图5所示。
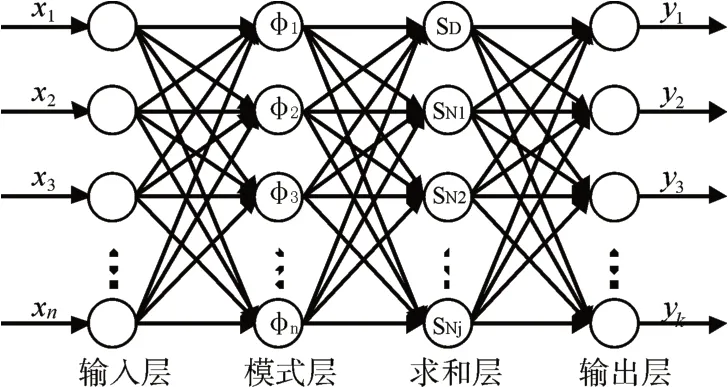
图5 GRNN网络结构图
1)输入层
选择合加速度ai、合角速度ωi和高度ℎi为特征参数,对应网络输入
2)模式层神经元传递函数

式中,σ为光滑因子。
3)求和层

式中:yij为第i个输出Yi中的第j个元素。
4)输出层

3.2 PSO算法
PSO算法[14]通过粒子调整自己的位置来搜索最优解。粒子的最优解记为pbest,粒子群的最优解记为gbest。粒子的速度为vi,粒子的位置为zi,每个粒子根据下式更新自己的速度和位置。
式中,vi(t+1)表示第i个粒子在t+1次迭代的速度,ω为惯性权重,c1和c2为加速度因子,r1和r2为[0,1]间的随机数。
3.3 PSO-GRNN模型
通过粒子群算法寻优,找到最优光滑因子,构建PSO-GRNN神经网络模型[15]。导入XA、XB和标签数据YA、YB,进行模型训练和测试,步骤如图6所示。

图6 PSO优化GRNN网络的基本框架图
1)初始化种群及粒子的速度和位置,设置粒子群算法的基本参数。
2)将粒子位置映射到GRNN网络中:以gbest为光滑因子spread,构建GRNN网络模型:net=newgrnn(P,T,spread)。P为神经网络的输入,T为神经网络的输出。
3)训练GRNN,并计算粒子所在位置的适应度值。适应度表示为输出值和实际值的均方根误差,计算公式如下:

式中:为中的第i组数据对应的标签,yA为网络实际输出。

4)更新pbest、gbest,若适应度优于之前的最优适应度,则更新pbest、gbest。
5)根据式(9)和式(10)对粒子的当前位置和速度进行更新和调整。
6)判断是否达到最大迭代次数,如果达到则保存最优GRNN模型,并进行模型的测试,如没有则返回2)。
4 模型验证与对比
本研究使用Matlab对构建的PSO-GRNN跌倒检测模型进行训练和验证。最后,选择支持向量机模型和BP神经网络模型进行对比实验。
4.1 PSO-GRNN模型的训练和测试
1)模型的训练
(1)设置PSO算法基本参数,如图7所示。将粒子位置映射到网络,并将XA及YA导入网络。为防止盲目搜索,将粒子位置和速度限制在

图7 模型参数设置图
(2)通过训练,在迭代至第121次时达到最优位置92.948;在迭代至第146次时达到最优适应度值0.0038。如图8所示。

图8 模型训练结果图
2)模型的测试
(1)将XB和YB导入网络,进行网络测试。重复20次测试,其中一组测试结果如图9所示,其中输出值为1表示行人跌倒;输出值为0表示行人未跌倒。图9中,第1和10组数据测试值与实际值差异较大,可确定为辨识错误;第25和36组数据的测试值与实际值存在可接受误差,故不属于辨识错误。

图9 训练结果图
经过测试,目标精度为0.005的情况下,平均正确率为0.95。
(2)为了验证粒子群参数对PSO-GRNN网络预测结果的影响,更改粒子Vmax、Vmin,c1、c2对跌倒行为进行预测,平均预测结果如表2所示。由表2可知,在PSO-GRNN跌倒检测的模型中,当粒子速度在[- 20,20]时,c1=c2=0.75时,跌倒检测的平均正确率最高,效果最好,误差最低。

表2 不同粒子群参数下的预测结果
(3)在除XA和XB外的实验数据中,提取前侧、右侧、左侧、后侧跌倒数据各50组,构建新测试数据集,导入训练好的模型中测试,结果如图10所示。
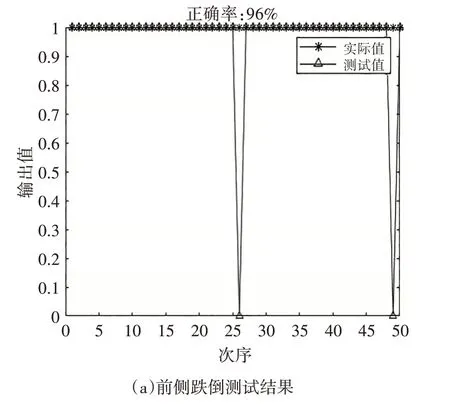

图10 各类型跌倒辨识的正确率
由图10可得,PSO-GRNN模型对各类跌倒的辨识正确率分别为前侧96%;右侧98%;后侧98%;左侧仅为92%。初步分析出现这种现象可能是,实验时率先进行的左侧跌倒,被测者在跌倒时可能有一些防备,导致跌倒的数据出现偏差。
4.2 对比实验
为验证PSO-GRNN的优越性,将XA、YA、XB、YB导入支持向量机(SVM)[16]和BP神经网络(BPNN)检测模型进行对比。
1)SVM跌倒检测模型
选择径向基函数作为核函数,经过多次训练和测试,结果如图11所示。由图可知,出现3组辨识错误,最终得到SVM对跌倒行为的检测正确率为92.5%。

图11 SVM模型跌倒测试结果
2)BPNN跌倒检测模型
选择拟牛顿法训练BPNN,最大训练次数为1000次,训练精度(goal)分别为10-1、10-2、10-3、10-4、10-5,学习率(lr)选择0.1、0.2,跌倒行为预测的正确率(RBP),如表3所示。

表3 BP神经网络预测效果
由表3可知,经过参数的调整优化,BPNN模型检测的准确率为92.25%,但学习速度慢,容易陷入局部极小值。
通过上述对比实验,相比于SVM和BPNN模型,PSO-GRNN模型寻优过程简单,精确率高,稳定性好。
5 结语
本文提出一种基于粒子群优化广义神经网络的跌倒检测方法。通过采集人体腰部的三轴加速度、三轴角速度和高度数据,分析行人跌倒的特征。构建PSO-GRNN跌倒检测模型,通过Matlab对模型进行训练和测试。结果表明:该模型能有效地识别出行人跌倒行为。在目标精度为0.005情况下,平均准确率能够达到了95%。未来工作可以对行人类型进行细致的划分,通过对不同类型的行人跌倒行为进行分析,可以更加深入研究行人跌倒的规律,进一步优化检测模型。
