变胞机器人重构及转向时足着地柔顺性控制
2023-01-05阮小栋杨鹏亮郑敏毅
刘 俊 阮小栋 杨鹏亮 吴 迪 郑敏毅
合肥工业大学汽车与交通工程学院, 合肥,230009
0 引言
机器人的柔顺性是评价机器人运动系统的重要指标,它作为运动控制中的关键环节对提高机器人性能具有重要意义[1]。机器人足着地柔顺控制根据实现形式的不同分为被动柔顺控制和主动柔顺控制[2]。其中被动柔顺控制是通过在机器人与环境之间安装弹簧、阻尼等机械机构来缓冲和吸收相互作用时所带来的冲击[3],但由于这些机构所起到的柔顺效果有限且不方便进行直接控制,因此被动柔顺控制仅仅应用在一些特定场合中。而主动柔顺控制则是通过使用一些传感器采集机器人与环境之间的作用力信息,并及时将信息反馈至控制器,从而不断调整关节转角以改变足底与环境之间的相对位置。主动柔顺控制因为具有适应性强、易控制等优点,目前已经有很多机构和组织研究了多种不同的机器人足着地主动柔顺控制方法。YIN等[4]在一种新型六足月球着陆器的支腿上安装了三个集成驱动单元,用来模仿主动弹簧和阻尼器的动力学特性,通过将冲击能量转化为电机上的热能并消散,从而避免了软着陆期间腿内部结构的损坏。SATO等[5]在腿式机器人脚尖安装位置检测传感器用于着陆前地面的检测,并根据传感器输出施加反馈控制,通过降低脚尖和地面的相对速度来减轻着陆冲击力。柴汇[6]通过采用关节力矩传感器代替传统足底力传感器间接推算出了机器人足底的受力情况,并通过控制关节位置实现了对Scalf机器人足着地柔顺控制。李健泉等[7]借鉴人体下肢在面对冲击时采取的柔顺方法,将单腿机器人简化为线性虚拟弹簧、阻尼结构,通过建立虚拟腿长与足端和地面接触力之间的关系来实现主动柔顺。陶红武等[8]为了解决四足机器人单腿跳跃时存在的冲击力问题,建立了一种基于力控制内环和阻抗控制外环的主动柔顺方法。柯贤锋等[9]利用被动弹簧能够快速缓解地面冲击的特点,在被动柔顺的基础上进一步利用液压执行器的主动柔顺控制实现足式机器人的平稳触地。
上述工作只针对机器人直行时足落地进行柔顺控制,缺乏关于变胞机器人转向重构时足落地的柔顺控制研究。此外,大部分的柔顺控制方法没有考虑系统的鲁棒性,在未知多变环境下的控制效果有待提高。本文以轮腿式变胞机器人为研究对象,通过对机器人转向重构过程进行运动规划,建立转向重构过程的运动学模型。基于传统阻抗控制原理,得出机器人足端位置与足端接触力之间的映射关系,通过分析阻抗控制下实际接触力与期望力之间的稳态误差,利用李雅普诺夫渐进稳定性定理设计自适应阻抗控制器来实现对转向重构的足着地进行柔顺性控制。
1 变胞机器人结构设计及转向重构运动规划
1.1 变胞机器人结构设计
变胞机器人是一种轮腿独立型地面移动系统,它具有可折叠腿部机构及水平举升机构两套变胞构件,通过变胞构件的变形可实现在多种运动状态间自由切换,且在变形过程中其外形结构与系统自由度都会发生变化。本文所设计的轮腿式变胞机器人两种运动状态以及所包含系统结构组成如图1所示。
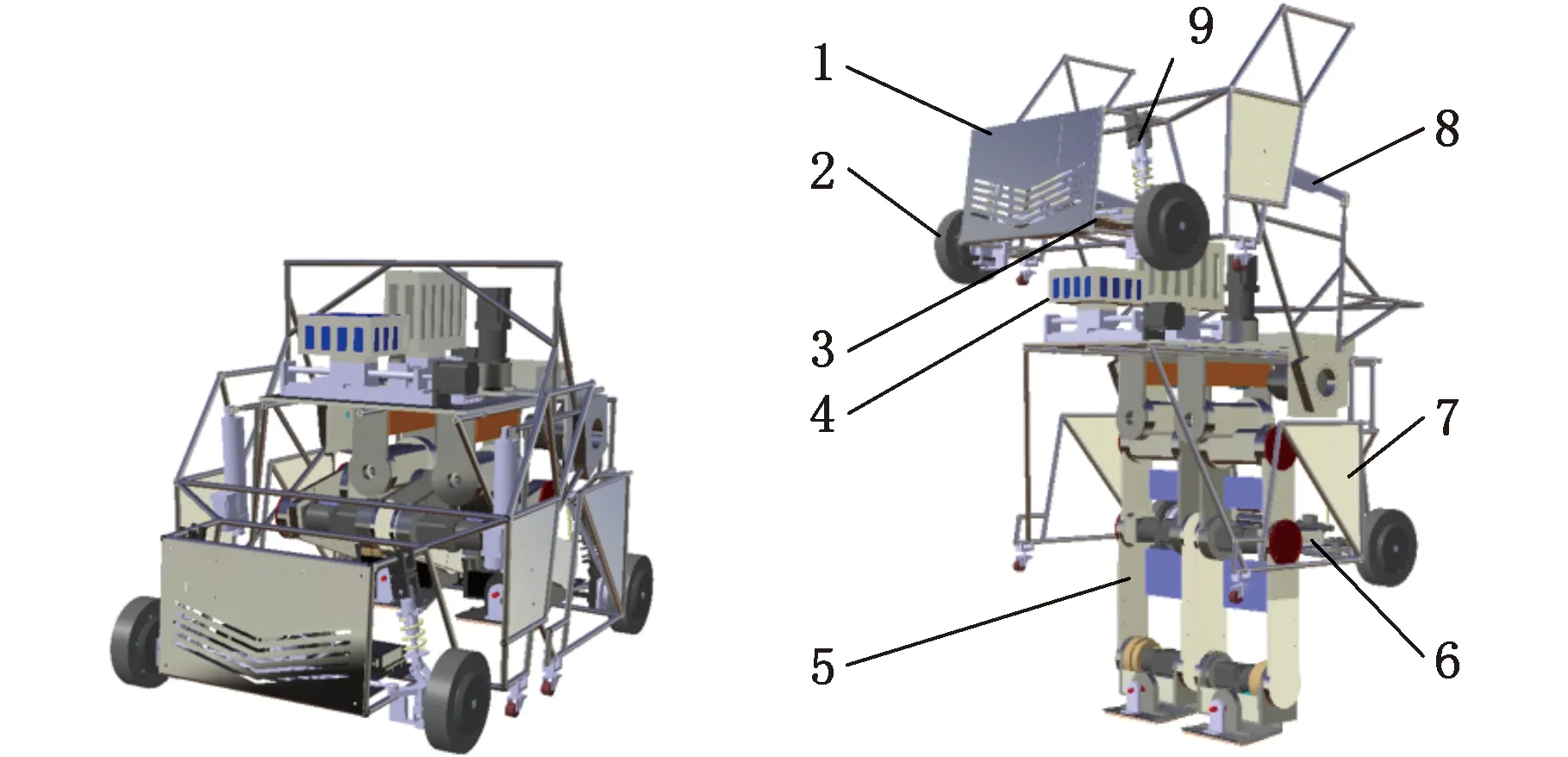
(a)汽车态 (b)类人态1.前机身 2.车轮 3.转向总成 4.调质心机构 5.腿部机构 6.制动总成 7.后机身 8.水平举升机构 9.悬架总成图1 轮腿式变胞机器人结构图
当变胞机器人在平整结构路面上以汽车态轮式行驶时,腿部机构折叠在车体内部,如图1a所示,此时可将整车视为一个刚体,在空间中具有6个自由度,即沿车辆坐标系x、y、z三个直角坐标轴方向(前进,横向,垂直)的移动自由度和绕三个坐标轴方向(侧倾,俯仰,横摆)的转动自由度。当变胞机器人需要重构变形为类人态时,由于双腿各配置了6个自由度(踝关节2个,膝关节1个,髋关节3个),此时腿部机构会在踝、膝、髋关节三处控制前后摆动自由度的电机驱动下展开直至仿人站立,与此同时前车身会在水平举升机构的举升电机和电动推杆的共同驱动下实现水平举升,最终类人态如图1b所示。在变胞机器人处于类人态时共有18个自由度,即除双腿配置的12个关节自由度外,还包括在分析变胞机器人整体运动性态时所描述的沿其整体质心处坐标系x、y、z三个直角坐标轴方向(前进,横向,垂直)的移动自由度和绕x、y、z三个直角坐标轴方向(翻滚,俯仰,偏航)的转动自由度。
1.2 驻车转向重构运动规划
为了提高变胞机器人转弯与重构动作间的耦合程度,通过合理规划关节转动规律,使得变胞机器人在完成转向的同时实现快速稳定地重构[10]。以右转向为例,转向重构运动过程可以按照机器人单脚支撑期和双脚支撑期划分为5个阶段,如图2所示。假设变胞机器人从汽车态开始,首先腿部各关节在俯仰自由度上进行伸展,使机器人双脚着地到达支撑态,之后双腿在经过短暂同步站立后,两踝关节在翻滚自由度上转动,将质心移动到左腿上,左腿将在转弯时充当支撑腿。支撑腿继续小幅度伸展,使得右腿摆动,通过支撑腿髋部电机绕竖直轴方向转动,使摆动腿以及整个车身完成转向动作。为了使支撑腿也能保持与车身方向一致,需要将右摆动腿接触到地面,并将质心转移至右脚,在原支撑腿变为摆动腿后,经髋关节电机驱动也完成转向,最后需要将质心再次转移到两腿之间。由于水平举升机构在运动过程中并不会与其他构件发生干涉,因此可以使举升关节始终保持匀速转动,只需要在结束时前机身能完成水平举升即可。

图2 轮腿式变胞机器人驻车转向重构过程
2 运动学建模
2.1 变胞机器人三维模型简化
借鉴人体在三维空间中运动平面的定义,将变胞机器人的运动平面划分为前向平面、侧向平面和横向平面,前进运动发生在前向平面,侧向移动发生在侧向平面,髋关节绕竖直轴转动发生在横向平面[11]。轮腿式变胞机器人整车结构较为复杂,在分析时需要对其进行简化,其中腿部简化模型如图3所示。
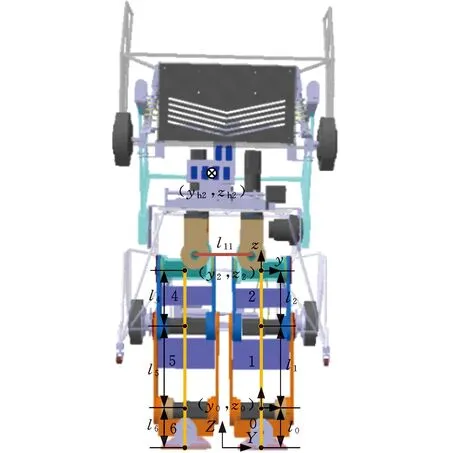
图3 腿部简化模型
为了便于运动学描述,将机器人三维模型简化为在前向平面和侧向平面的连杆模型,如图4所示。图4中变胞机器人正处于单脚支撑期(此时左腿为支撑腿,右腿为摆动腿),定义机器人固定坐标系(X,Y,Z)在两腿中间,且X轴指向前进方向,Y轴指向左腿,Z轴指向竖直方向,基础坐标系(x0,y0,z0)建立在左支撑腿踝关节处,方向与固定坐标系相同,当支撑腿切换为右腿时,只需将基础坐标系的位置以及关节坐标交换即可。
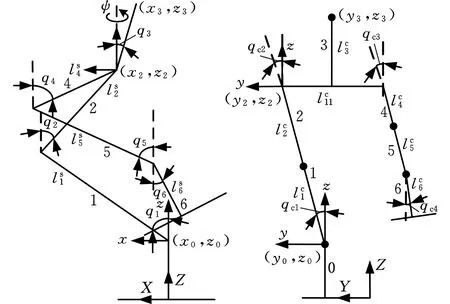
(a)前向平面 (b)侧向平面图4 前向平面、侧向平面连杆模型
由于变胞机器人转弯重构过程是空间运动,因此需要将机器人各杆件的实际长度向前向平面和侧向平面进行分解,如图4所示,图4中各符号的含义如表1所示。在前向平面内各杆件的长度如下:
侧向平面内各杆件长度如下:
2.2 转向重构运动学模型
以右转向为例,根据变胞机器人转弯重构规划过程,左腿将先作为支撑腿,通过2.1节中建立的连杆模型,可得到各关节在左踝关节基础坐标系下的运动学约束方程如下:
(1)
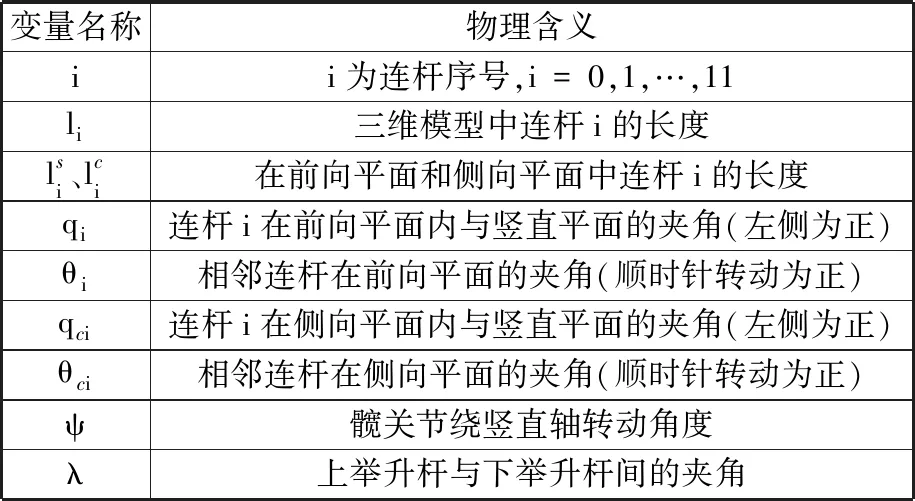
表1 变胞机器人运动模型参数
为了完成转向要求,当机器人左腿作为支撑腿时,位于髋关节竖直方向的电机需要驱动除左腿外的所有质量单元在横向平面内转动一定角度。首先计算出其他关节相对于左腿髋关节的坐标位置,然后在此基础上左乘一个旋转矩阵,可以得出第i关节经过转动之后在基础坐标系下的位置坐标为
(2)
i=3,4,5,6
其中各连杆质心在基础坐标系下的坐标可以通过选择各杆件的中间位置来表示,并通过平移变换矩阵将基础坐标下各机构的质心转化到固定坐标系下:
(3)
为了保证转向后左腿也能与其他部件保持方向一致,需要将右腿设置为支撑腿,左腿为摆动腿,再次转动髋关节电机使左腿转动相同角度。此时需要将基础坐标系原点(x0,y0,z0)分配到右腿的踝关节处,同时左右腿连杆标号及参数发生互换,相比于第一次旋转,第二次旋转应做两处修改:用式y3=y2+l11/2代替式(1)中的y3,旋转矩阵更替为
(4)
i=4,5,6
假设第一次左腿髋关节绕竖直轴转动的角度为α,通过旋转平移坐标变换矩阵将右腿变为支撑腿时,基础坐标系下的各机构质心转化到固定坐标系为
i=1,2,…,6
(5)
3 摆动腿着地阻抗控制方法
3.1 阻抗控制模型建立与分析
变胞机器人阻抗控制模型是通过输入压力传感器测出的机器人足底与地面间的相互作用力,并经过一定的阻抗关系产生相应的关节转角修正量,从而不断调整足底位置使其能够跟踪期望接触力的[12]。阻抗关系表达式为
(6)
其中,F为机器人足底与地面之间的实际接触力和力矩,F∈R6,为了实现对期望接触力的跟踪,引入了力参考信号Fd,Fd与F均由三个方向上的力与力矩组成。Md、Bd、Kd分别为阻抗模型的质量矩阵、阻尼矩阵和刚度矩阵,Md∈R6×6、Bd∈R6×6、Kd∈R6×6。P、Pd分别表示机器人摆动腿末端的实际与期望位姿向量,包含x、y、z三维方向的位置与姿态角,P∈R6×6、Pd∈R6×6。另外Pe和Fe分别表示机器人摆动腿末端的位置和接触力跟踪误差。
将式(6)作拉普拉斯变换可以得到其频域表达式:
(7)
根据式(6)的阻抗控制模型,可以得到以下结论:当机器人足端不与地面接触时,此时接触力F=0,目标阻抗变为
(8)
由于此时没有发生接触,机器人变为位置控制模式。当机器人与环境发生接触即与环境之间产生了相互作用力时,机器人不再是一个独立的系统,而是应该将机器人所接触的环境共同纳入考虑范围。但在实际建立环境模型时,同时考虑6个方向上的力和力矩,其建模过程会比较复杂,且由于摆动腿在着地过程中,主要发生的是沿Z方向的接触力,其他方向上的力和力矩影响较小,因此环境模型可以简化为由一个弹簧构成的系统,该系统用来模仿足端与地面在Z方向上的实际接触力,此时系统结构示意如图5所示。在仿真实验中,当没有力传感器时足底与地面之间的实际作用力可以由环境模型中的弹簧力来代替,如下式所示:
F=ke(p-pr)
(9)
式中,ke为环境刚度;pr为环境的参考位置;p为模型简化后机器人摆动腿末端实际位姿。
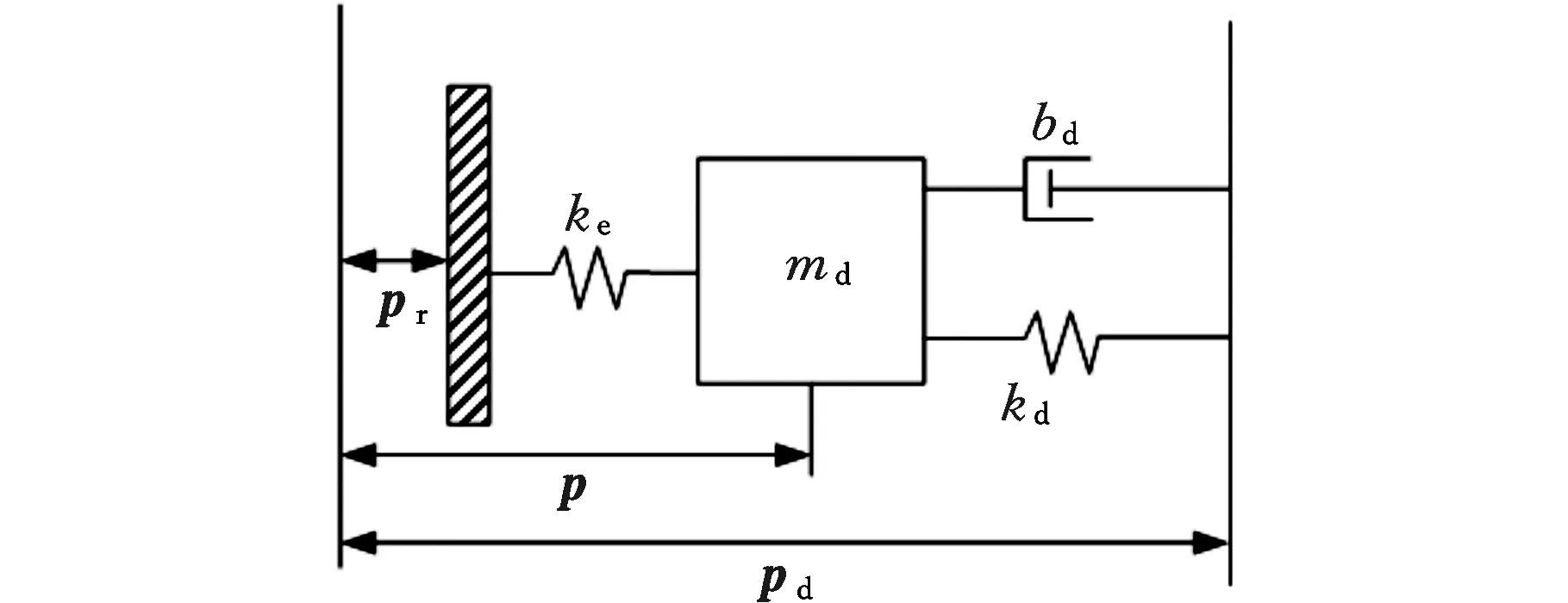
图5 阻抗控制与环境接触的等效模型
3.2 稳态误差分析
为了研究基于阻抗控制的柔顺控制,本节将对阻抗控制下脚力稳态误差进行分析。考虑到3.1节中建立的环境模型只分析了沿Z轴单一方向上的力,因此需要对式(6)进行简化,即只考虑沿Z轴方向上的接触力,忽略其他方向上的力和力矩的影响。当机器人足底与地面在一段时间内持续接触时,参考位置pd需设置为常数,由式(6)可得
(10)
式中,md、bd、kd为模型简化后只考虑Z方向上的质量、阻尼和刚度参数;pd为模型简化后机器人摆动腿末端期望位姿。
在阻抗控制中,当机器人与环境发生接触时,此时满足|p|>|pd|,根据上述环境模型可知此时的机器人足端位置可以表示为
(11)
将式(11)代入到式(10)中得
(12)

(13)
由式(13)可以看出,当系统的力稳态误差为0时,摆动腿末端的参考位置需要满足如下条件:
(14)
因此需要得到精确的环境位置和环境刚度,所求得期望轨迹才可以使得实际接触力无误差地跟踪期望力。然而,环境位置和环境刚度参数在大多数情况下是无法精确获得的,主要是由于目前还没有专业的测量仪器,且机器人在运动过程中所接触的环境是不断发生变化的。通常环境刚度ke非常大,微小的位置偏差就可能产生很大的接触力偏差,因此传统的阻抗控制是难以实现精准的力控制的。
3.3 自适应阻抗控制
在自适应算法[13-14]中先估计环境刚度和环境位置,计算一个足端位置的期望值:
(15)

根据上述地面与足端的简化模型,此时地面与足端之间的接触力为
F=ke(p-pr)
(16)
其估计值为
(17)


(18)
(19)
(20)
使用李雅普诺夫渐进稳定性定理来推导间接自适应阻抗控制率。
选取二次型函数为李雅普诺夫函数:
V=φTRφ
(21)
对上述正定的李雅普诺夫函数求导可得
(22)
(23)

根据上述假设以及式(18)可以解得
(24)
因此完整的间接自适应算法可总结为
(25)
如图6所示,间接自适应阻抗控制框图由参数估计和轨迹修正两部分组成,先根据实际环境接触力和足端实际位置估算出关节期望轨迹,然后不断用估算出来的轨迹替换原来的轨迹。
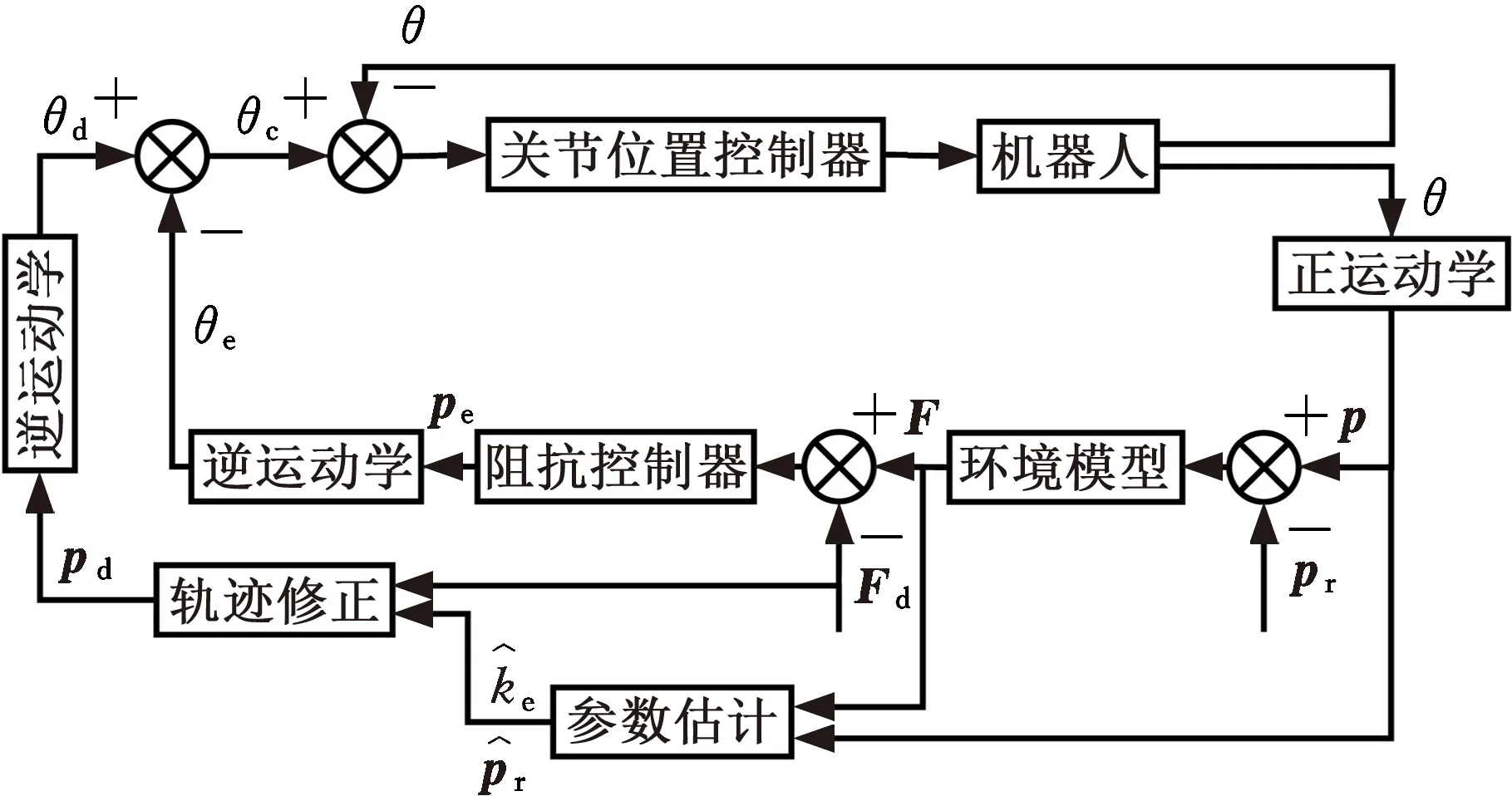
图6 变胞机器人自适应阻抗控制原理图
3.4 基于粒子群优化算法的阻抗参数优化
基于位置的自适应阻抗控制的控制效果容易受到所选取阻抗参数的不同而呈现出不同的变化,因此在实际应用时需要选取恰当的阻抗参数,以保证机器人足底接触力能够快速跟踪到期望接触力。阻抗参数的选取一般可以通过专家知识或者经过大量的仿真实验获取,但这类方法只能对参数进行粗略的选择,因此,可以利用智能寻优算法来精确获取阻抗参数,从而提升控制性能[15]。本节采用粒子群优化算法对控制模型的阻抗参数进行优化,粒子群优化算法主要流程如图7所示。
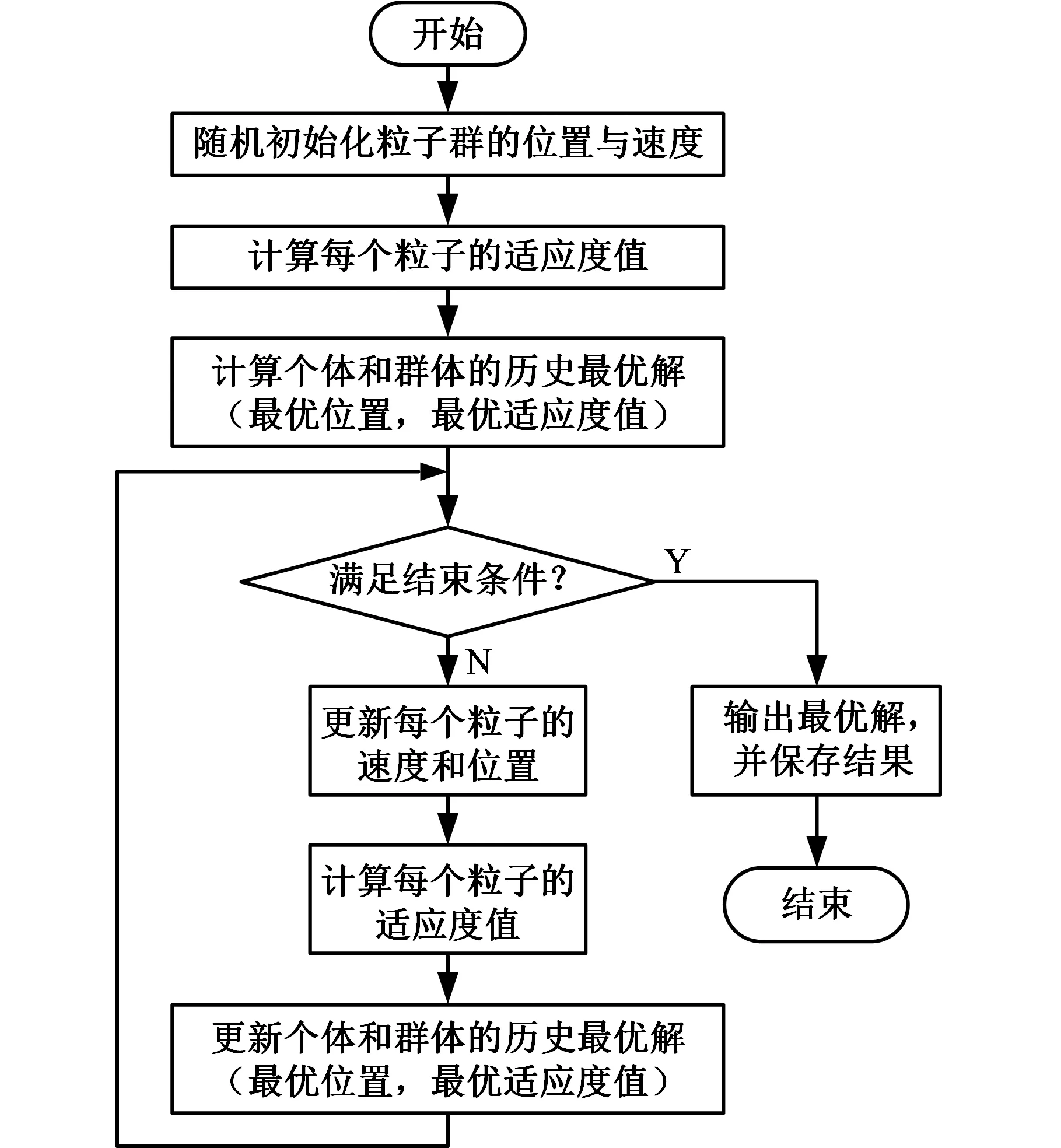
图7 粒子群优化算法流程图
变胞机器人转向重构过程中需要满足摆动腿末端接触力偏差和位置跟踪误差尽可能小,因此可以设计最优化问题的适应度函数为
(26)
粒子群优化算法首先需要随机初始化一组粒子的位置与速度(粒子的位置坐标对应于阻抗控制参数值),假设在一个D维的目标搜索空间中有N个粒子组成的群落,则其中第i个粒子的位置向量可表示为Xi=(xi1,xi2,…,xiD),其中,i=1,2,…,N;j=1,2,…,D)。第i个粒子的速度可表示为Vi=(vi1,vi2,…,viD),将其代入到自适应阻抗控制中,计算出Fe与pe,并根据式(26)得出在该组参数下的适应度值,通过比较适应度值的大小挑选出各粒子自身的个体最优解Qi和群体最优解Qg;接下来通过再次更新各个粒子的位置和速度不断挑选出新的个体与群体的最优解,直到其适应度值不再发生变化或整体达到所设定的迭代次数为止,此时输出最优的阻抗控制参数,其中粒子的位置和速度根据下式进行更新:
(27)
式中,w为惯性权重;g为当前迭代次数;c1、c2分别为个体和群体的学习因子;r1、r2为区间[0,1]内的随机数;vij(g)为第i个粒子在g次迭代时第j维的速度向量;xij(g)为第i个粒子在g次迭代时第j维的位置向量;Qij(g)为第i个粒子在g次迭代时第j维的历史最优位置;Qgj(g)为群体在g次迭代时第j维的历史最优位置。
由于是针对阻抗控制参数进行优化,因此上述粒子的维数为3。选择粒子数为60,惯性权重w=0.5,学习因子c1=0.5,c2=0.35,最大迭代次数设置为50,同时在搜索过程中限制粒子的最大速度vm的范围为[-1,1],最终系统在优化过程中的适应度计算过程如图8所示。
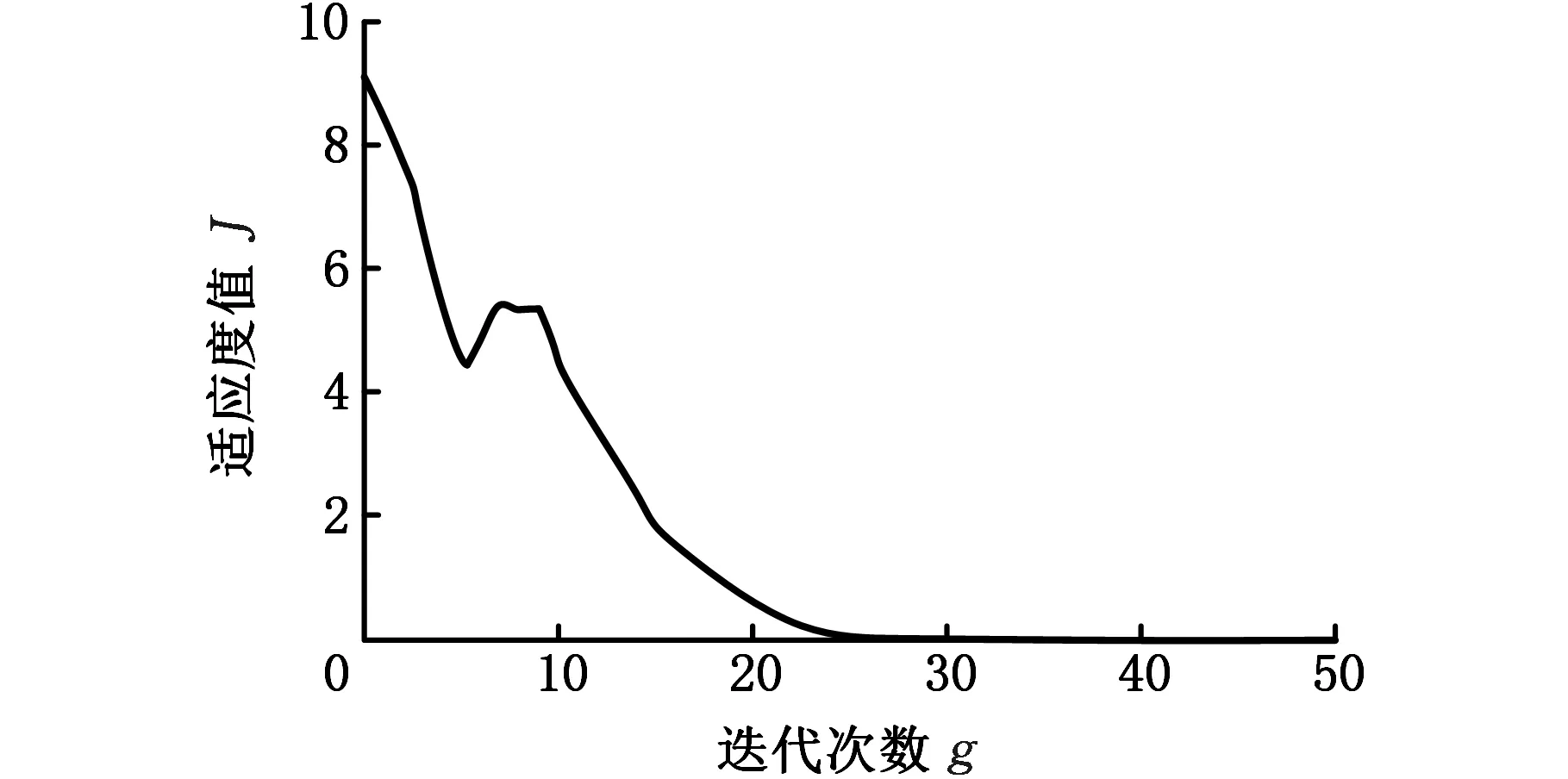
图8 适应度变化曲线
由图8可以看出,当迭代次数进行到25次时,粒子的适应度值已经达到最小值1.632×10-12,接近于0。此时所选取的阻抗参数即达到最优,md=59.82 kg,bd=6432.75 N·s/m,kd=120.47 N/m。
3.5 转向重构柔顺控制时序
阻抗控制的主要作用是减小机器人由单腿支撑期切换至双腿支撑期时,摆动腿着地所引起的地面反作用力对机器人稳定性的影响,因此在转向重构过程中,一开始当变胞机器人处于单腿支撑期时,此时摆动腿尚未接触到地面,因此仅需要对其进行位置跟踪控制;之后当摆动腿接触地面后阻抗控制起柔顺作用,且在进入双腿支撑期后进入保持状态,继续维持控制效果;最终当变胞机器人由双腿支撑期进入下一个单腿支撑期后,原摆动腿将切换成支撑腿,此时阻抗控制将不再继续施加作用,原摆动腿的位姿需要逐渐恢复至规划时的运动位置,以保证机器人能够稳定支撑。
图9显示了变胞机器人转向重构过程中足端在Z方向上的运动轨迹,其中在tt-r时刻变胞机器人右腿将作为摆动腿与地面接触,此时与地面之间的接触力Fz会瞬间增大,当判断出Fz超过某个恒定阈值Ft时,则认为机器人已进入双脚支撑期,将该时刻记为tt。同理机器人在经过双腿支撑期之后,当摆动腿切换至左腿时,它与地面间的接触力Fz减小到某个恒定阈值Fl,判定机器人进入右腿单脚支撑期,将该时刻记为tl。图9中在tl-r时刻机器人左腿将作为摆动腿离开地面,理论上此时地面作用力Fz应保持零值。记tt-s为运动规划中机器人右腿最高点开始下降的时刻,tl-f为运动规划中机器人左腿达到最高点的时刻,则在tt-s~tt时间范围内,右腿阻抗控制主要起顺应作用,在tt~tl范围内,阻抗控制为保持状态,在tl~tl-f范围内机器人右腿逐渐恢复到参考位置。
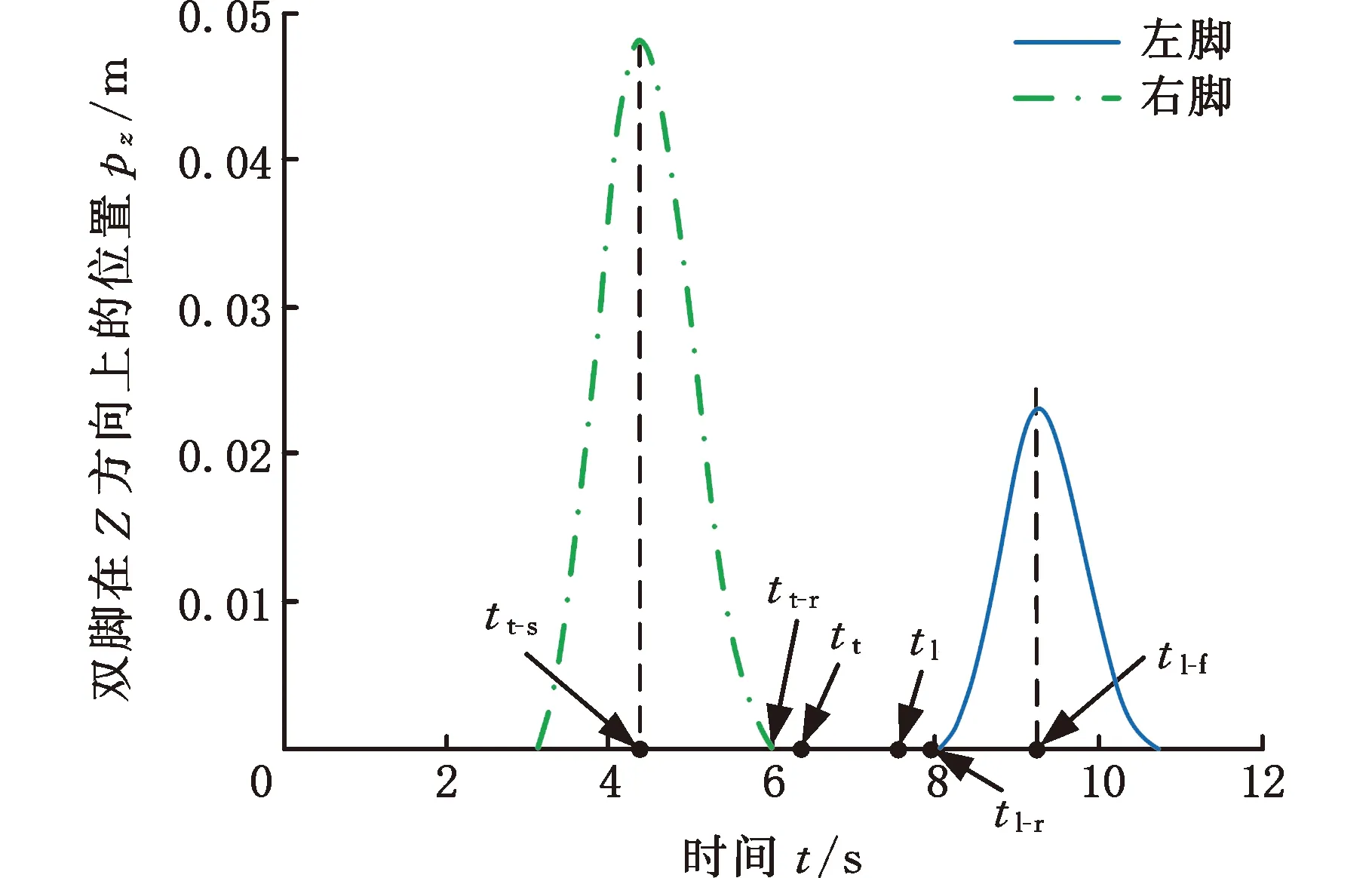
图9 转向重构时双脚在Z方向的运动轨迹
3.6 阻抗控制仿真实验研究
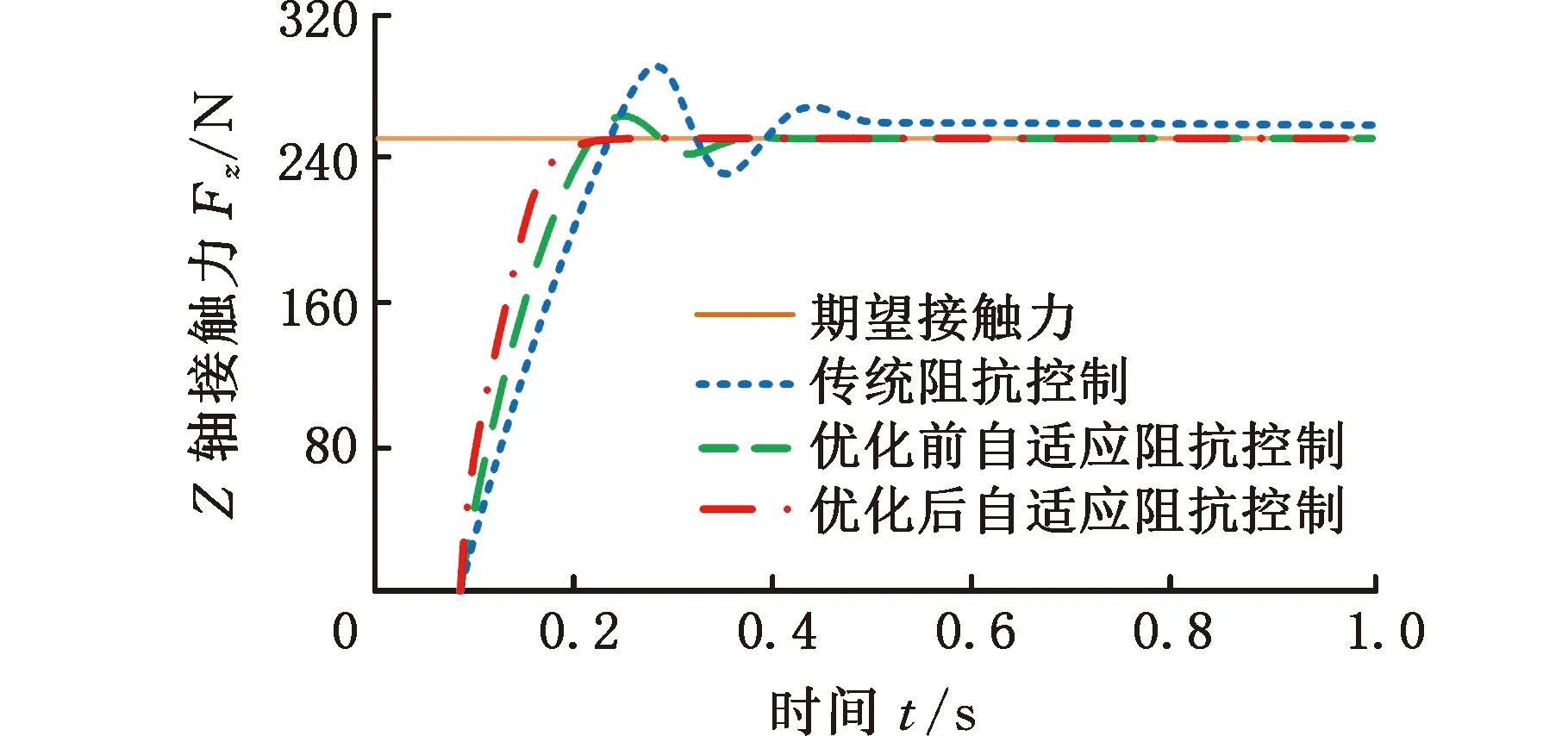
(a)ke=5×104 N/m时阻抗控制阶跃力响应曲线
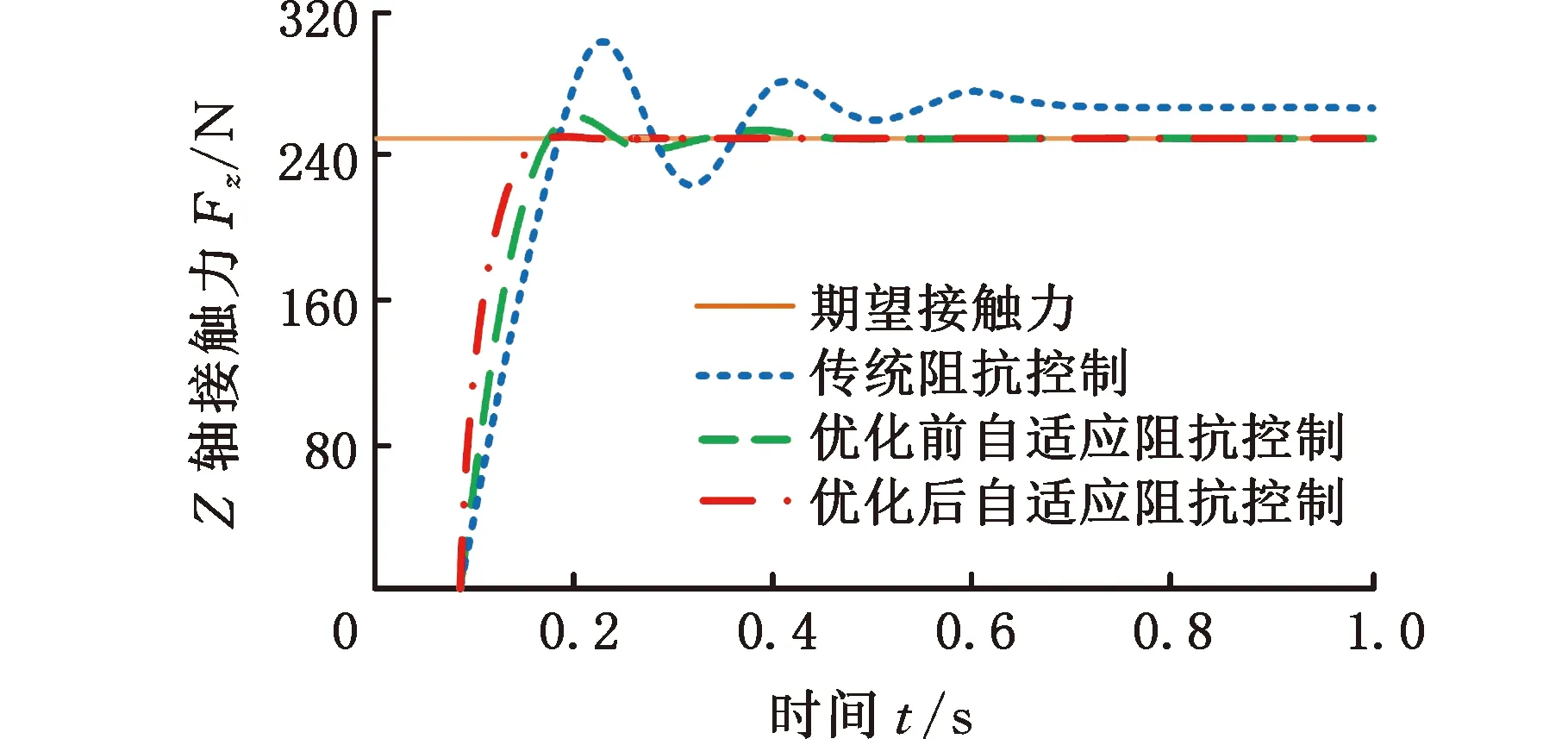
(b)ke=1×105 N/m时阻抗控制阶跃力响应曲线
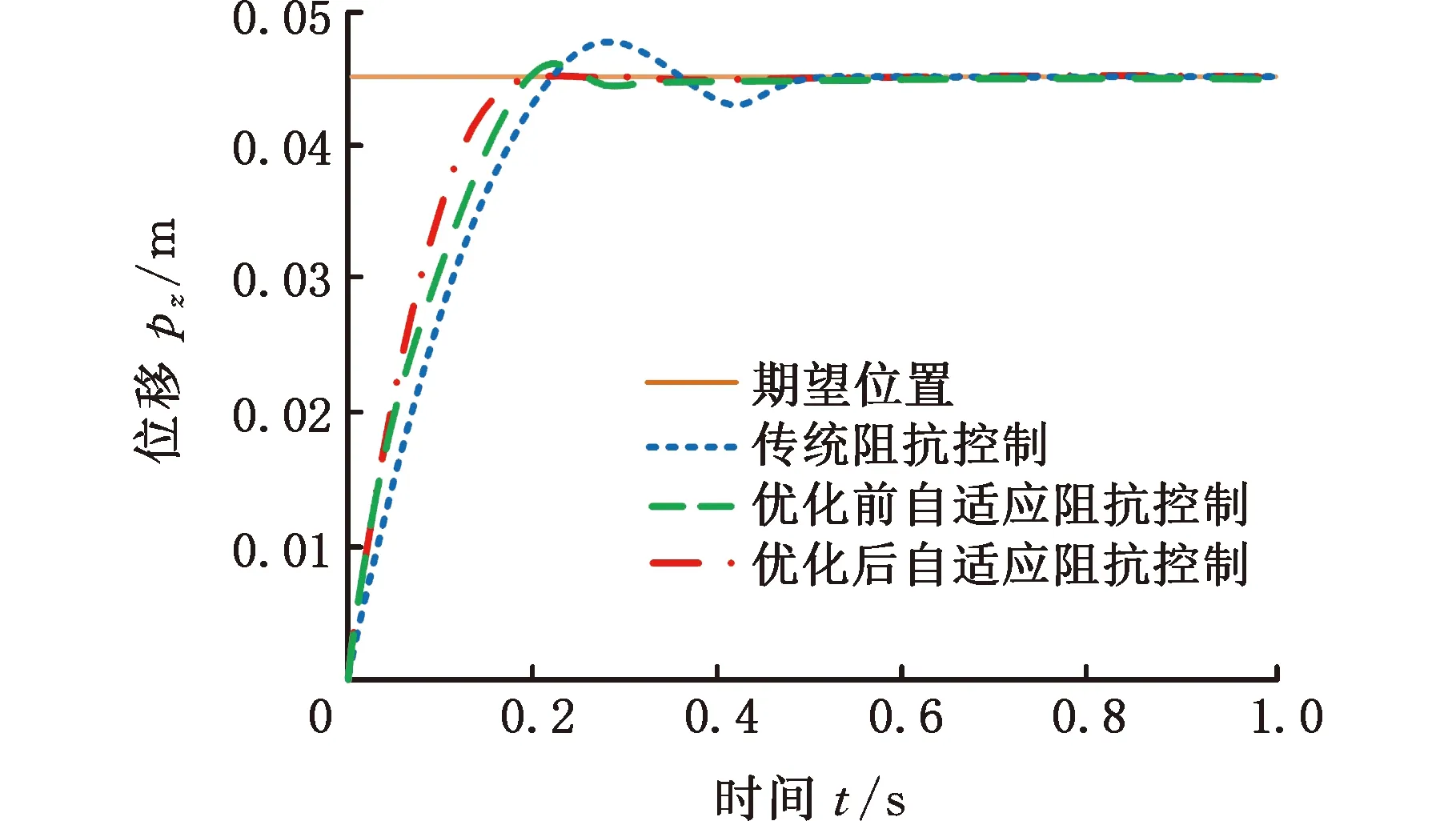
(c)ke=5×104 N/m时阻抗控制阶跃力响应曲线
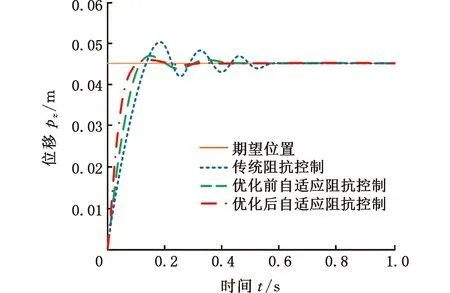
(d)ke=1×105 N/m时阻抗控制阶跃力响应曲线图10 阻抗控制在不同环境刚度下力与位置的响应曲线

4 实验验证
4.1 实验平台搭建
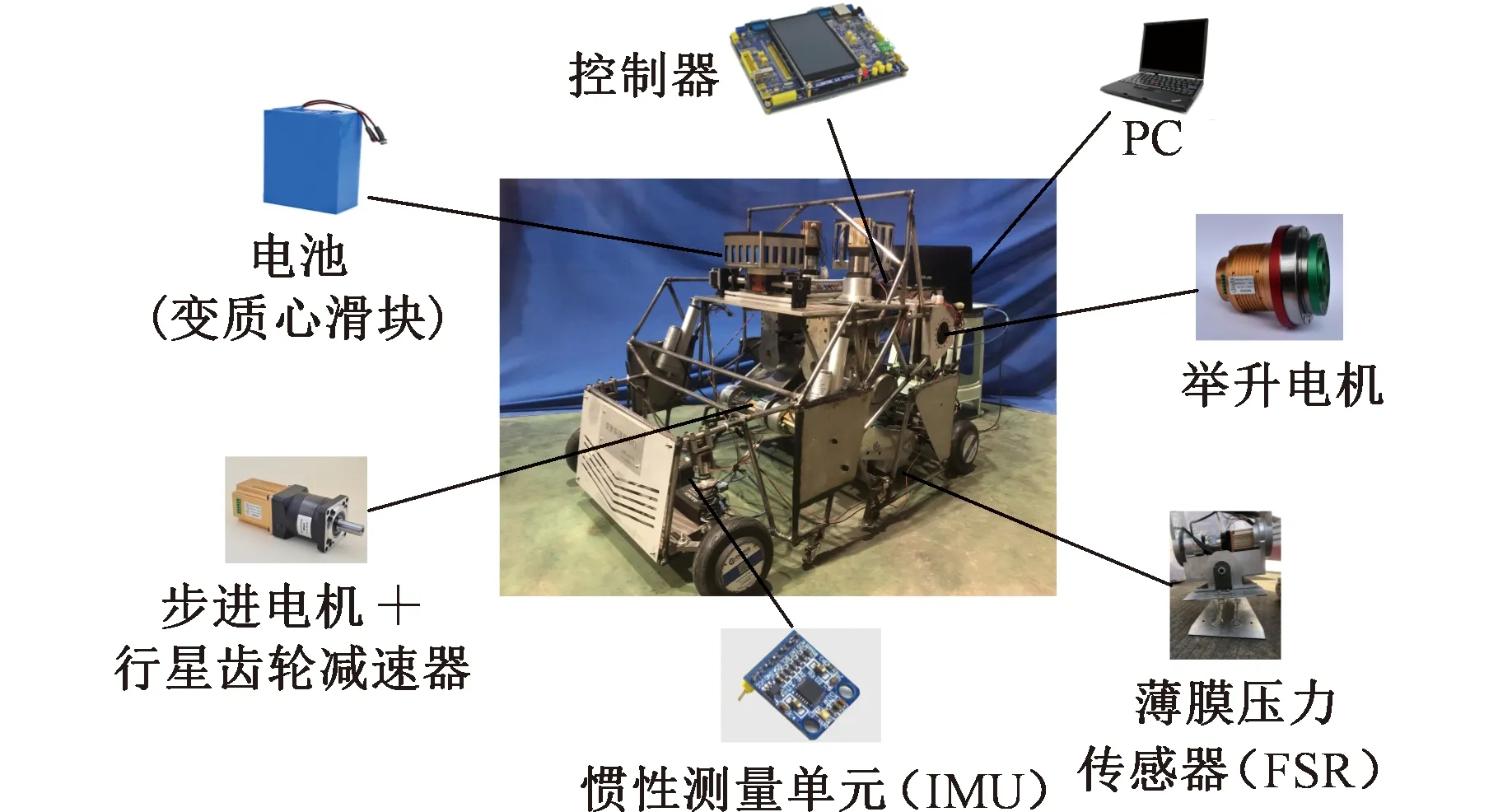
图11 变胞机器人及控制系统
实验平台主要由变胞机器人样机以及测控系统两部分组成。依据上文所设计的结构进行加工并装配出实体样机。测控系统由PC上位机、控制器(ECU)下位机、传感器(惯性测量单元(IMU)、薄膜压力传感器(FSR)等)、电气执行机构(关节步进电机、举升电机、电动推杆、变质心控制电机等)、机载电源等组成。上位机用作人机交互接口,运行LabVIEW软件,设定电机等执行机构的运行控制参数,显示无人变胞车重构运动的信息;下位机接收各传感器数字信号并实现对底层执行机构的控制。上位机与下位机通过串口实现通信。图11为变胞机器人的控制系统示意图。机器人每只脚配备四个薄膜式压力传感器,利用压力传感器可实时获取足端与地面接触时的压力信息,足底压力传感器安装情况如图12所示。

图12 足底FSR402安装示意图
4.2 柔顺性实验
本实验主要验证机器人摆动腿着地柔顺控制效果。在变胞机器人转向重构的过程中,分别进行了无控制、传统阻抗控制以及采用粒子群算法优化前后自适应阻抗控制算法的实验验证,脚底压力传感器所测得的地面对机器人左脚及右脚在Z方向上的作用力曲线如图13和图14所示。
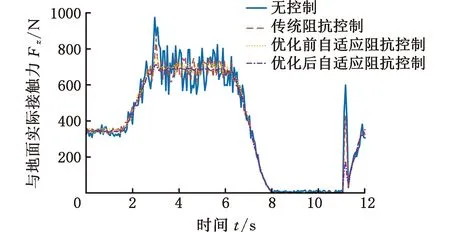
图13 变胞机器人转弯重构时左脚地面作用力
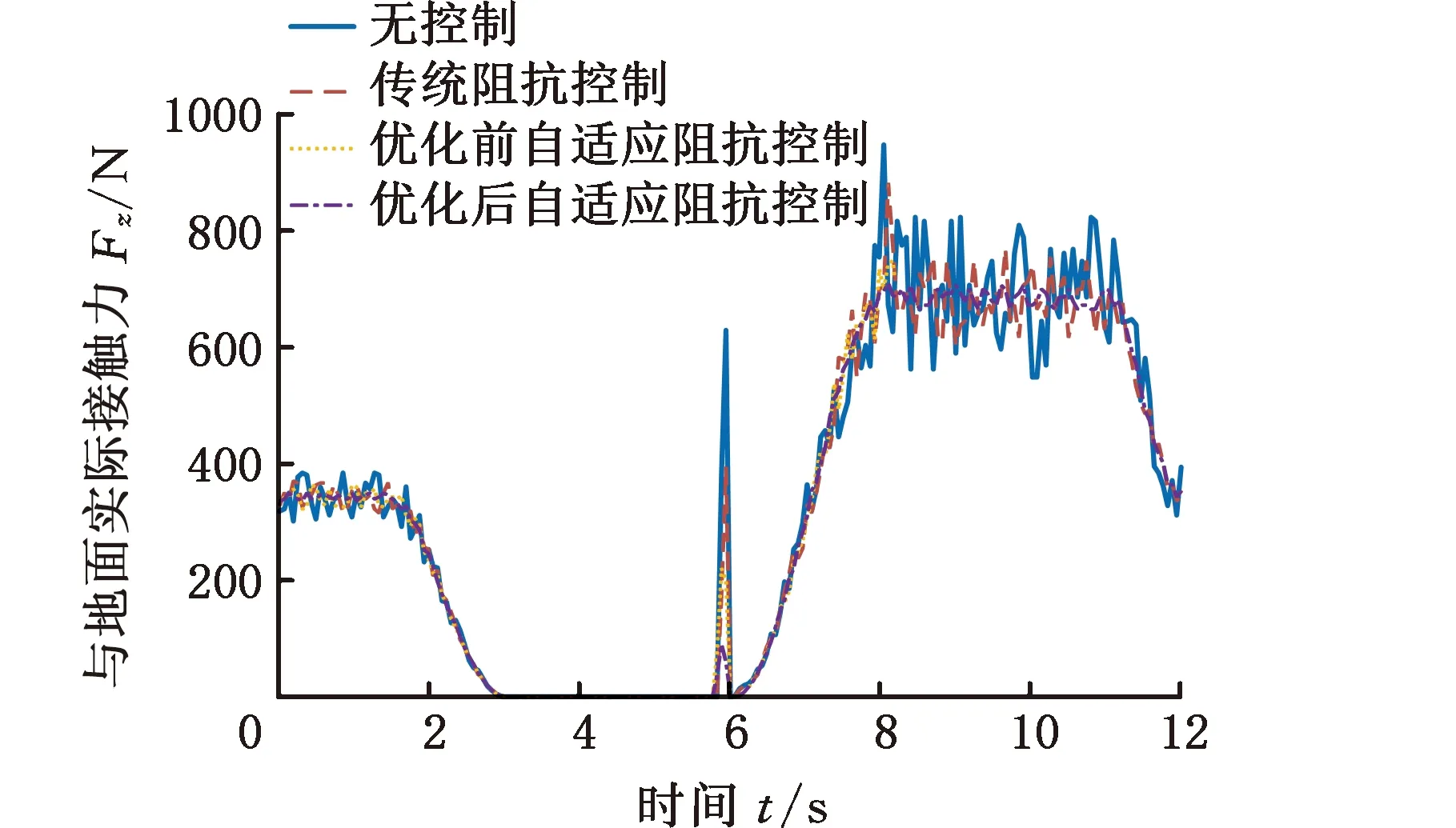
图14 变胞机器人转弯重构时右脚地面作用力
如图13所示,变胞机器人在前1.5 s时处于双脚支撑期,且质心基本维持在两腿之间,此时足底与地面之间的作用力主要是克服系统重力和竖直方向上的惯性力;在1.5~3 s期间机器人质心将逐渐转移至左脚支撑区域,因此左脚与地面间的作用力逐渐增大;3~6 s为单脚支撑期,此阶段可以看出上述曲线有明显差异,首先未施加任何控制策略下的接触力响应曲线会在单腿支撑期初始阶段有一个较大的冲击,且幅值力已达到980 N,虽经过短暂调整后略有减小但接触力曲线仍有较大波动;而在传统阻抗控制作用下,机器人与地面接触力在开始阶段也出现一个小的冲击,但其峰值相比于未施加控制时已大幅减小,且经过调整后接触力能够逐渐趋于稳定;在施加优化前的自适应阻抗控制后,地面接触力的波动范围明显比传统阻抗控制更小;而施加经过阻抗控制参数优化的自适应阻抗控制后,能够实现机器人足端接触力的无冲击及单腿支撑期时地面支撑力的稳定;在6~8 s期间,变胞机器人质心会发生右移,此时左腿与地面间的作用力将逐渐减小;在8~11 s期间左脚将切换为摆动腿,虽然此时左脚处于离地状态,但由于压力传感器存在误差,接触力数值也会有些许波动;在11 s时机器人左脚开始与地面接触,由于存在位置偏差,在接触瞬间左脚将受到来自地面的强大冲击,且经过短暂时间后冲击力又快速下降至较小值,出现这种现象主要是由于机器人脚部与地面之间是瞬时刚性接触,在触地之后有一个短暂离地过程,该过程不仅容易损伤机器人腿部机械结构,而且直接影响了机器人运动时的稳定性。因此此时拥有阻抗控制策略的作用更加明显,与未施加任何控制策略时的左腿摆动过程相比,采用阻抗控制算法后,在11 s左脚着地时与地面的刚性冲击明显减缓,同时通过对比优化前后的自适应阻抗控制,可以得出在经过参数优化之后,地面冲击性能降低更为明显,左腿基本不会出现弹跳离地的现象。
右腿着地过程中控制前后着地冲击及机身晃动情况与左脚类似。
5 结论
变胞机器人因其灵活性高的优势,具有较强的环境适应能力,本文针对机器人转向耦合重构过程中双足与环境间的交互产生的不稳定问题,在建立转弯重构运动学模型的基础上,将基于位置的自适应阻抗控制应用到变胞机器人的转向重构时足着地控制当中,通过仿真及实验验证了经过参数优化后的自适应阻抗控制能有效减小机器人摆动腿着地时与地面的刚性冲击。