真空紫外探测器关键参数校准装置
2023-01-04孙广尉杜继东李世伟周国澳杨海生
孙广尉,杜继东,李世伟,邓 培,程 前,黄 亮,周国澳,∗,杨海生
(1.北京振兴计量测试研究,北京 100074;2.火箭军装备部驻北京地区第六军事代表室,北京 100070)
1 引 言
当前,在我国多项科技工程中,真空紫外空间载荷得到越来越广的应用,如紫外告警、军事目标探测、夸父计划、火星探测计划、风云三号/四号等,在对军事、农业、灾害、资源环境、公共安全等重大问题进行决策的时候,真空紫外空间载荷获取的测量数据提供了有力依据。
作为载荷核心器件的真空紫外探测器光谱响应率及线性度的校准至关重要,直接决定了所研制仪器的性能指标。 通过在地面实验室进行光谱响应率及线性度的校准,提供仪器定标的关键数据,保障仪器输入辐射量与输出信号量值之间的定量关系,可以反演计算得到所需探测物质的信息量,如得到不同成分气体或气溶胶类物质的含量,这些信息可以用来帮助解决全球气候变化、大气层有害气体含量增多、气象预测准确度不高等问题[1]。
国内真空紫外空间载荷研制单位目前开展技术研究的波段范围覆盖(120~200) nm,所用的真空紫外探测器需要校准的参数主要包括光谱响应率和线性度,光谱响应率校准不确定度要求不大于15 %,线性度校准不确定度要求不大于3 %,为满足国内相关单位对校准提出的新需求,开展本装置研究工作。
2 真空紫外探测器关键参数校准方法
2.1 相对光谱响应率校准方法
相对光谱响应率校准方案示意图如图1 所示。
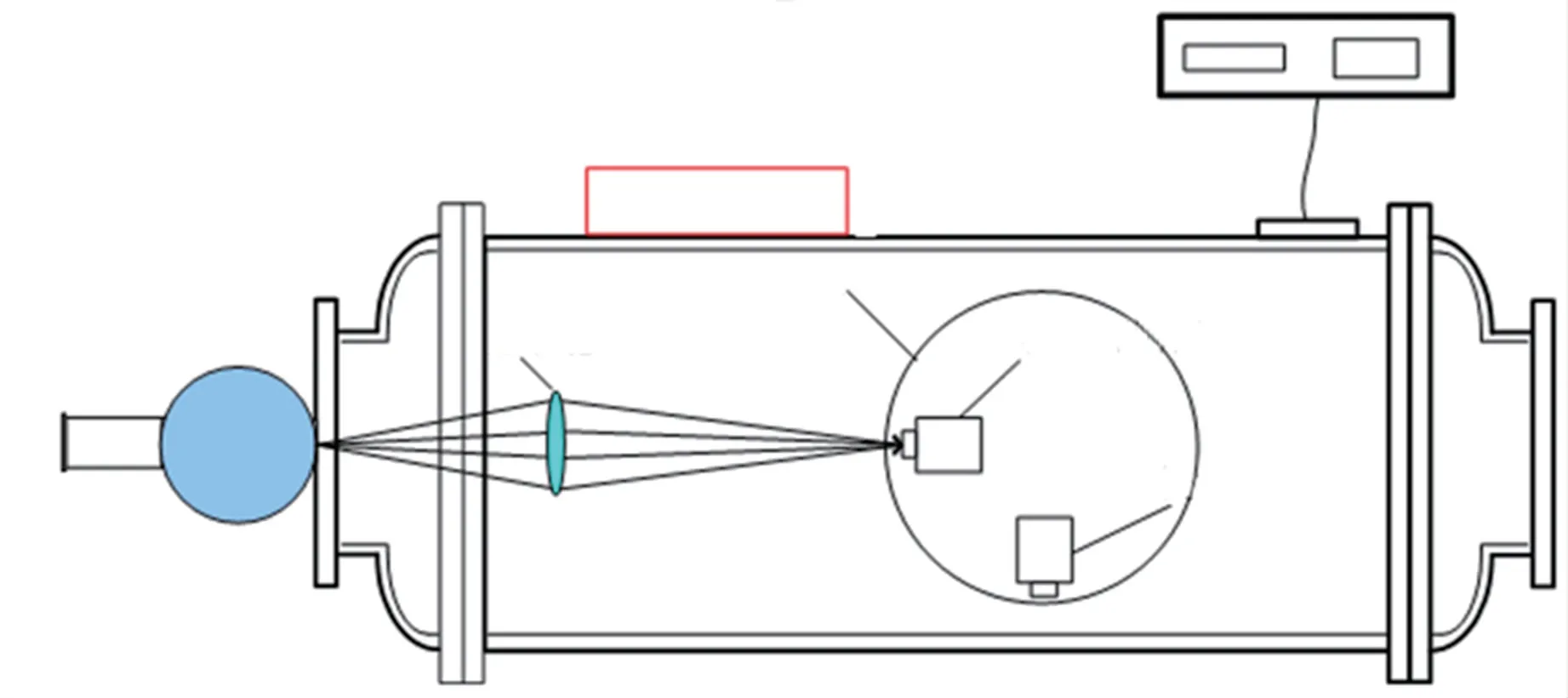
图1 相对光谱响应率校准方案示意图Fig.1 Schematic diagram of relative spectral response rate calibration
通过控制单色仪实现覆盖(115~200) nm 光谱范围的要求,设定5 nm 间隔进行波长扫描,读取标准探测器在不同波长位置的响应信号值;控制真空仓内转台转动,将待校探测器移入光路中,接收汇聚光斑,并将光斑打到探测器的中心位置,通过综合控制系统控制单色仪在(115~200) nm 范围内以5 nm间隔进行波长扫描,读取待校探测器在不同波长位置的响应信号值,通过比较测量法,测量得到待校探测器不同波长点的光谱响应率,然后进行归一化处理得到相对光谱响应率[2,3]。
相对光谱响应率计算过程如下[4,5]:

式中:STR(λ)——待校探测器的相对光谱响应率;ITR——待校探测器的输出电流信号,A;SSR(λ)——标准探测器的光谱响应率,A/W;ISR——标准探测器的输出电流信号,A;K——待校探测器相对光谱响应归一化系数,为待校探测器光谱响应度的最大值。
2.2 线性度校准方法
线性度校准方案示意图如图2 所示。 设计线性度校准用双光阑、移动挡板、移动挡板切换机构,实现3 种通光状态,分别为光阑A +B 通光、光阑A通光、光阑B 通光。
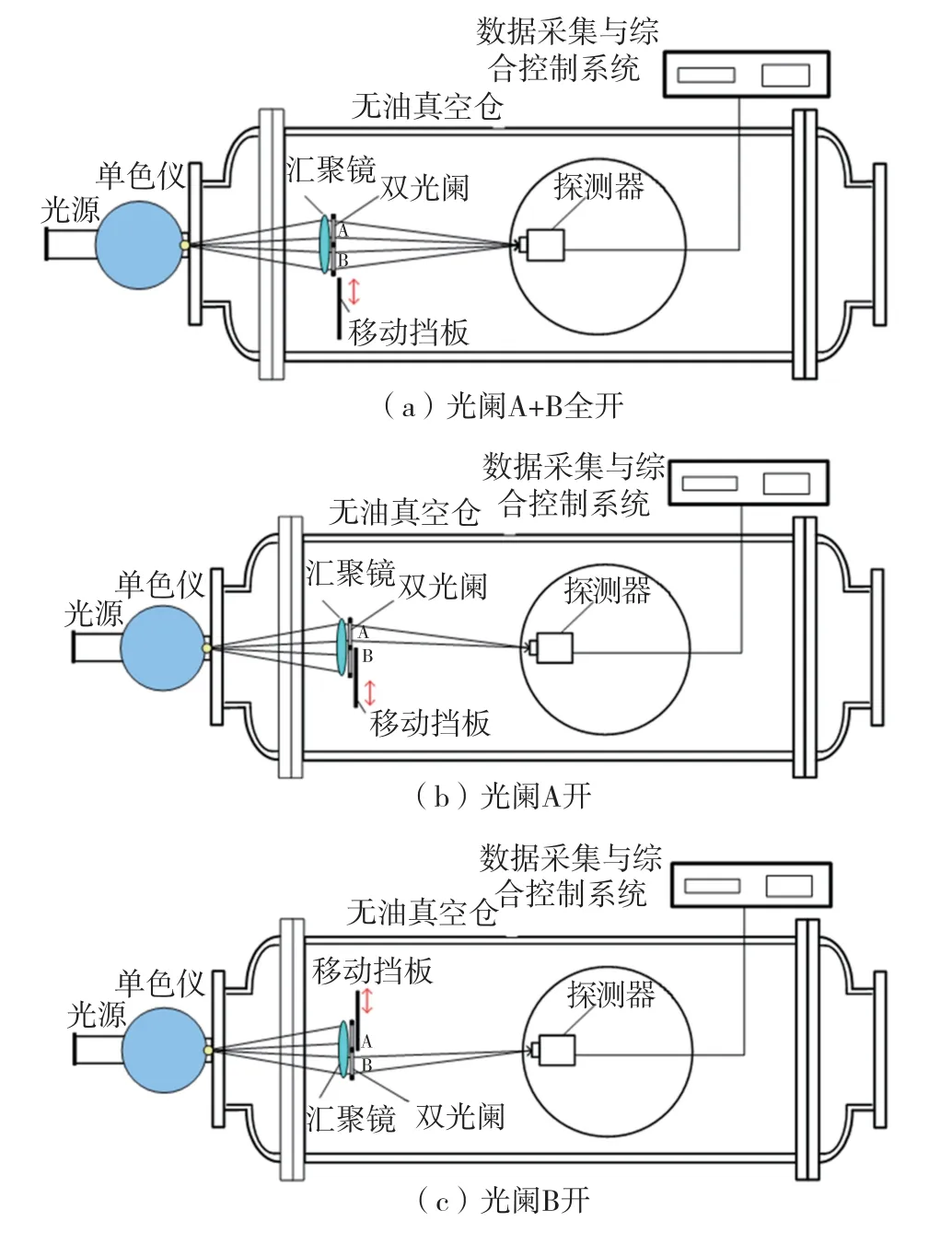
图2 线性度校准方案示意图Fig.2 Schematic diagram of linearity calibration
在对真空紫外探测器线性度参数进行校准时,首先保证仓内的真空度能够满足校准要求,然后将光源点亮预热,调节探测器位置,使之位于校准光路中,并能够完全接收到光源的入射光能量,对单色仪控制器发送指令,使单色仪处于0级状态,并将移动挡板移动到与双光阑完全不相交的位置,读取待校探测器在光阑A +B 通光状态下的响应信号值IAi+Bi;控制移动挡板移动到与双光阑一半相交的位置,读取待校探测器在光阑A 通光状态下的响应信号值IAi;控制移动挡板移动到与双光阑另一半相交的位置,读取待校探测器在光阑B 通光状态下的响应信号值IBi;通过比较三种状态下的信号值得到待校探测器的线性度[6-8]。
线性度校准原理如下:

式 中:NL(IAi+Bi)——待 校 探 测 器 的 线 性 度;IAi+Bi——待校探测器在光阑A、光阑B 全开的状态下响应电流信号,A;IAi——待校探测器在光阑A开、光阑B 关的状态下响应电流信号,A;IBi——待校探测器在光阑A 关、光阑B 开的状态下响应电流信号,A。
3 校准装置组成
3.1 相对光谱响应率校准装置分系统
1)真空紫外光源
该项目选择使用L11798 型氘灯,本款氘灯不需要其它液体制冷,同时氘灯的窗口材料为MgF2,由于MgF2窗口自身的光谱透过率特性,氘灯的发射光谱可以达到115 nm,可以满足本研究的短波波长要求,其特性曲线如图3 所示。
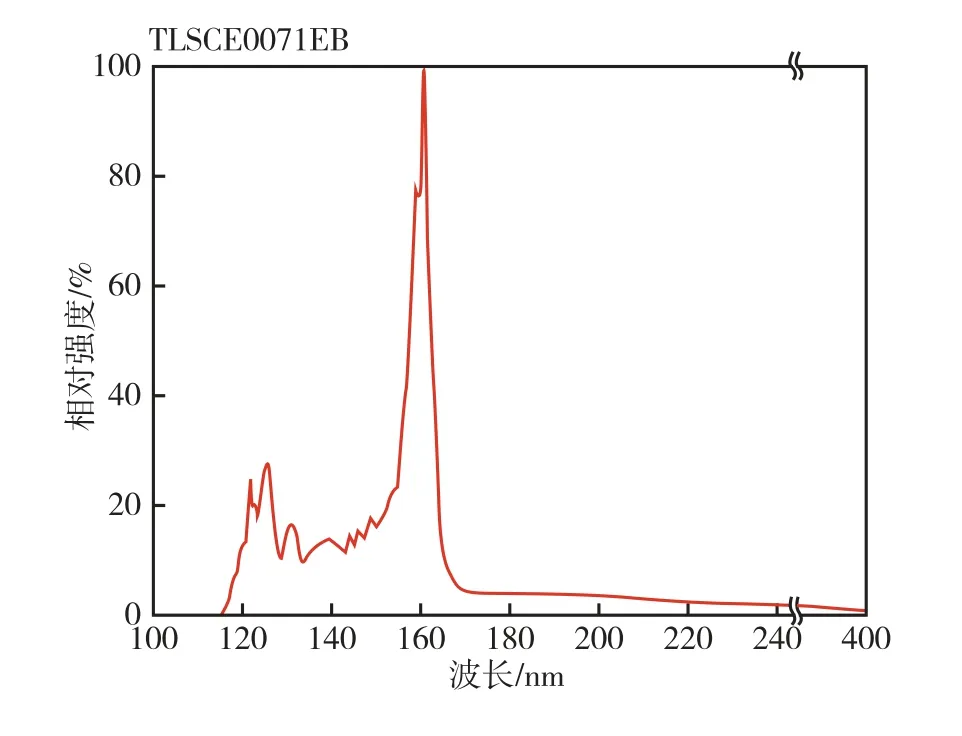
图3 L11798 型氘灯光谱曲线图Fig.3 The curve of L11798 lamp spectrum
2)真空紫外光源变换机构
真空紫外光源变换机构,可实现对入射光源进行分光的功能,生成窄带宽的准单色光进行出射,再与其它分系统组合,实现相应校准及测量功能。
真空紫外光源变换机构技术指标如表1 所示。
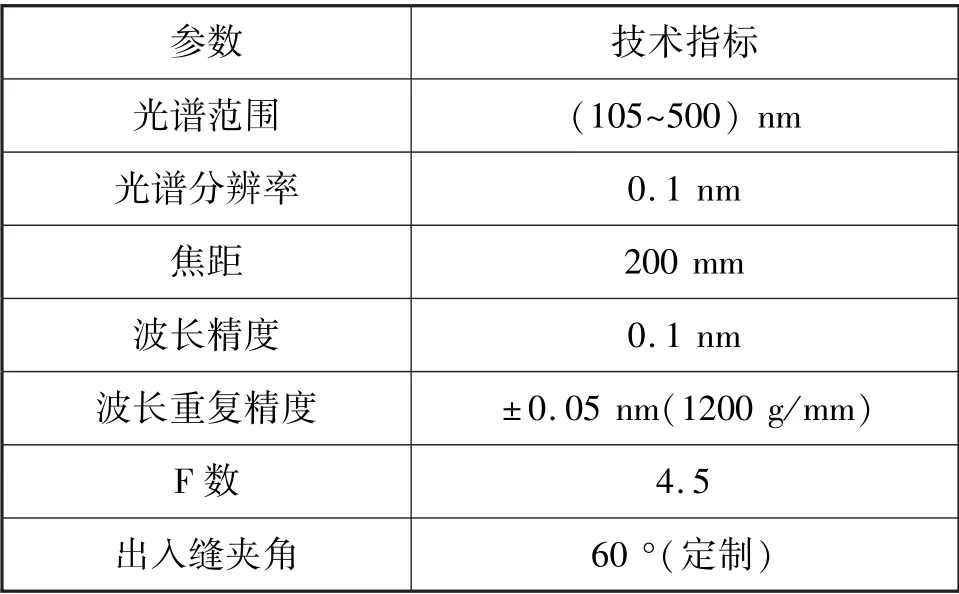
表1 真空紫外光源变换机构参数Tab.1 Parameters of VUV light source transformation
3)真空紫外光学系统
由于单色分光系统出射的单色辐射存在一定的发散角,如直接照射探测器会导致探测器接收的能量过于微弱,导致测量数据的准确度偏低,因此需要通过真空紫外光学系统进行汇聚,将光束进行汇聚,并打在探测器光敏面的中心位置,完全被探测器所接收,其实物如图4 所示。

图4 真空紫外光学系统实物图Fig.4 Picture of VUV optical system
4)真空二维扫描机构
标准探测器和待校探测器放置在真空二维扫描机构上,通过二维扫描机构的旋转,将标准探测器和待校探测器分别置于汇聚光路中。 二维扫描机构的转角范围为360 °,台面尺寸为600 mm,角度分辨率为0.01 °,重复定位精度为0.1 °。
5)真空条件下微弱信号放大处理组件
选用适用于真空紫外波段的探测器,,这里采用IRD 公司生产的型号为AXUV100G 的紫外增强型硅光电二极管,其在(120~200) nm 波段具有良好的光谱响应特性,如图5 所示,并具有量子效率高、噪音低,无需外加电压,对外磁场不敏感,对真空环境污染不敏感等优点。
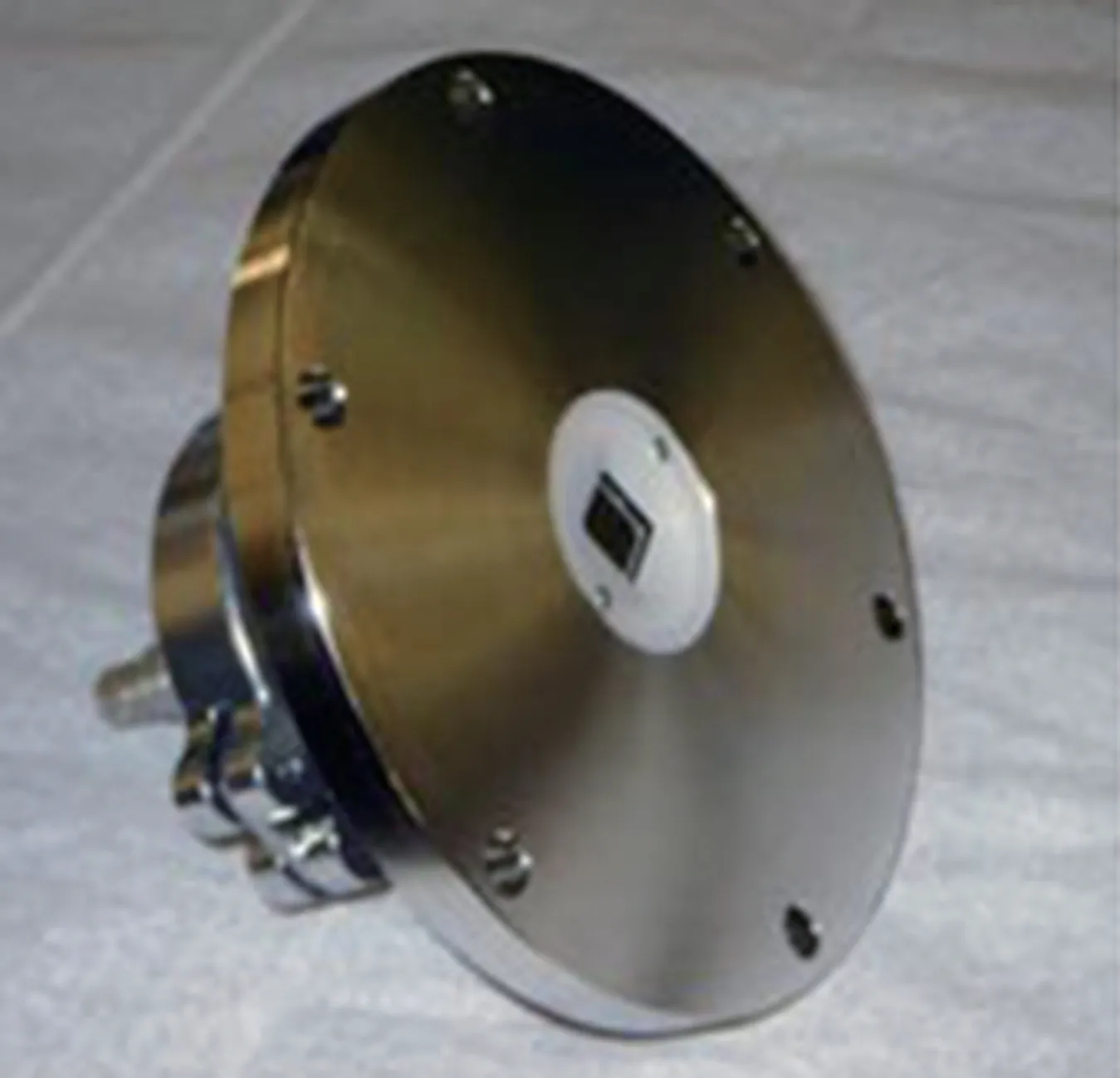
图5 硅光电二极管AXUV-100G 实物图Fig.5 Picture of silicon photodiode AXUV-100G
6)真空仓系统
真空仓系统的作用是在测量校准的光路中有效地屏蔽红外和可见光的杂散辐射,提供真空紫外校准的环境,其实物如图6 所示。 实现真空度小于6 ×10-3Pa 的真空度要求,从而消除由于真空度不满足使用要求所引入的测量误差。

图6 真空仓实物图Fig.6 Picture of vacuum chamber
7)真空紫外探测器光谱响应率校准软件
校准软件利用VC ++编制,通过模块化方式设计。 实现对综合控制系统的指令发送与数据采集,输出相对光谱响应率参数校准结果,自动绘制校准曲线,软件界面如图7 所示。
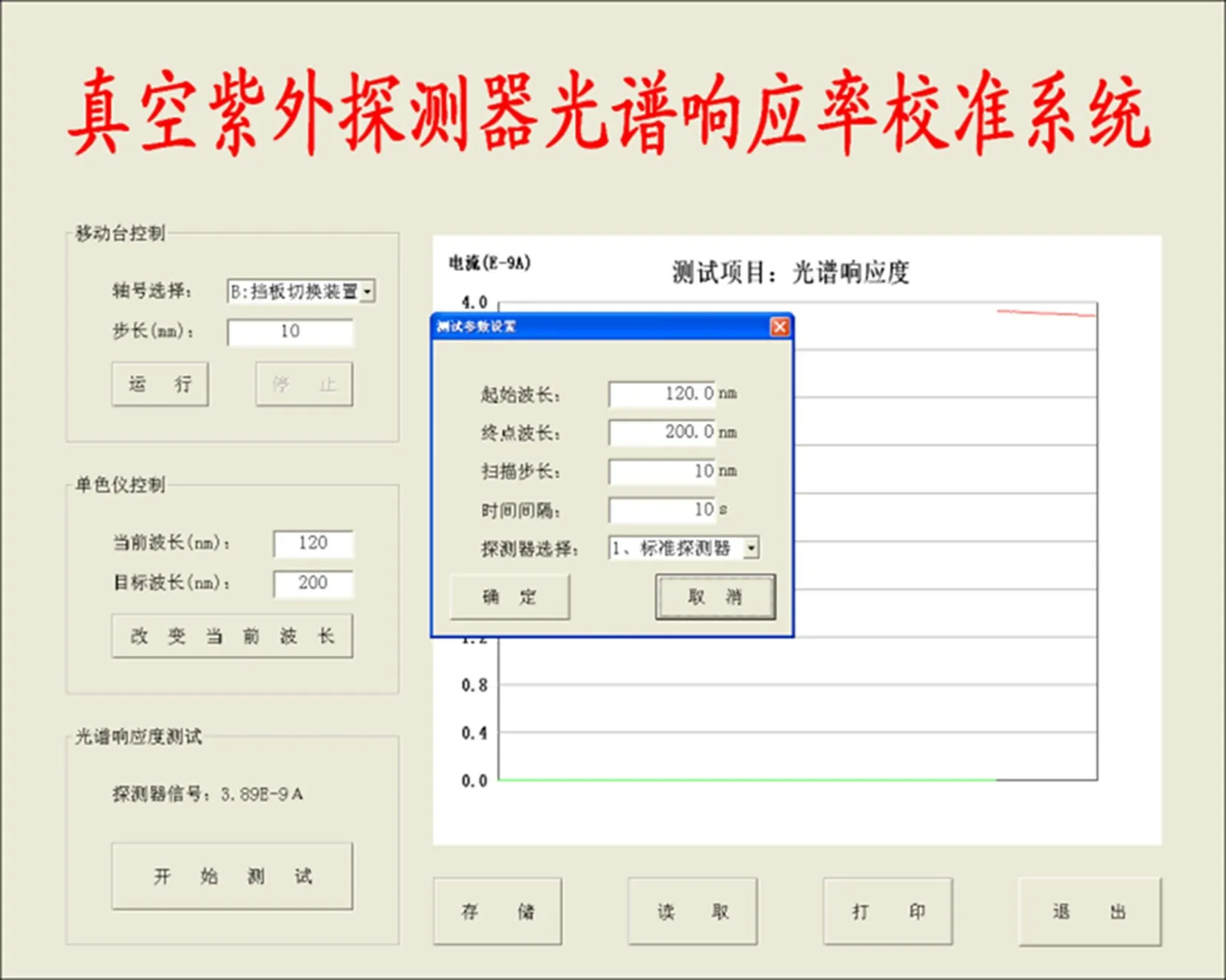
图7 光谱响应率校准软件界面图Fig.7 Interface of calibration for spectral response rate software
3.2 线性度校准装置分系统
3.2.1 真空紫外能量调节系统
与相对光谱响应率校准装置所用单色分光系统一致,通过单色仪的入射狭缝、出射狭缝实现出射光能量的调节,进而覆盖线性度测量动态范围20 dB的要求,如图8 所示。

图8 真空紫外能量调节系统实物图Fig.8 Picture of VUV energy regulating system
3.2.2 双光阑及挡板切换机构
双光阑与真空紫外光学系统尺寸一致,口径为Φ90 mm,中间设计10 mm 宽的分隔条,具体示意图如图9 所示。
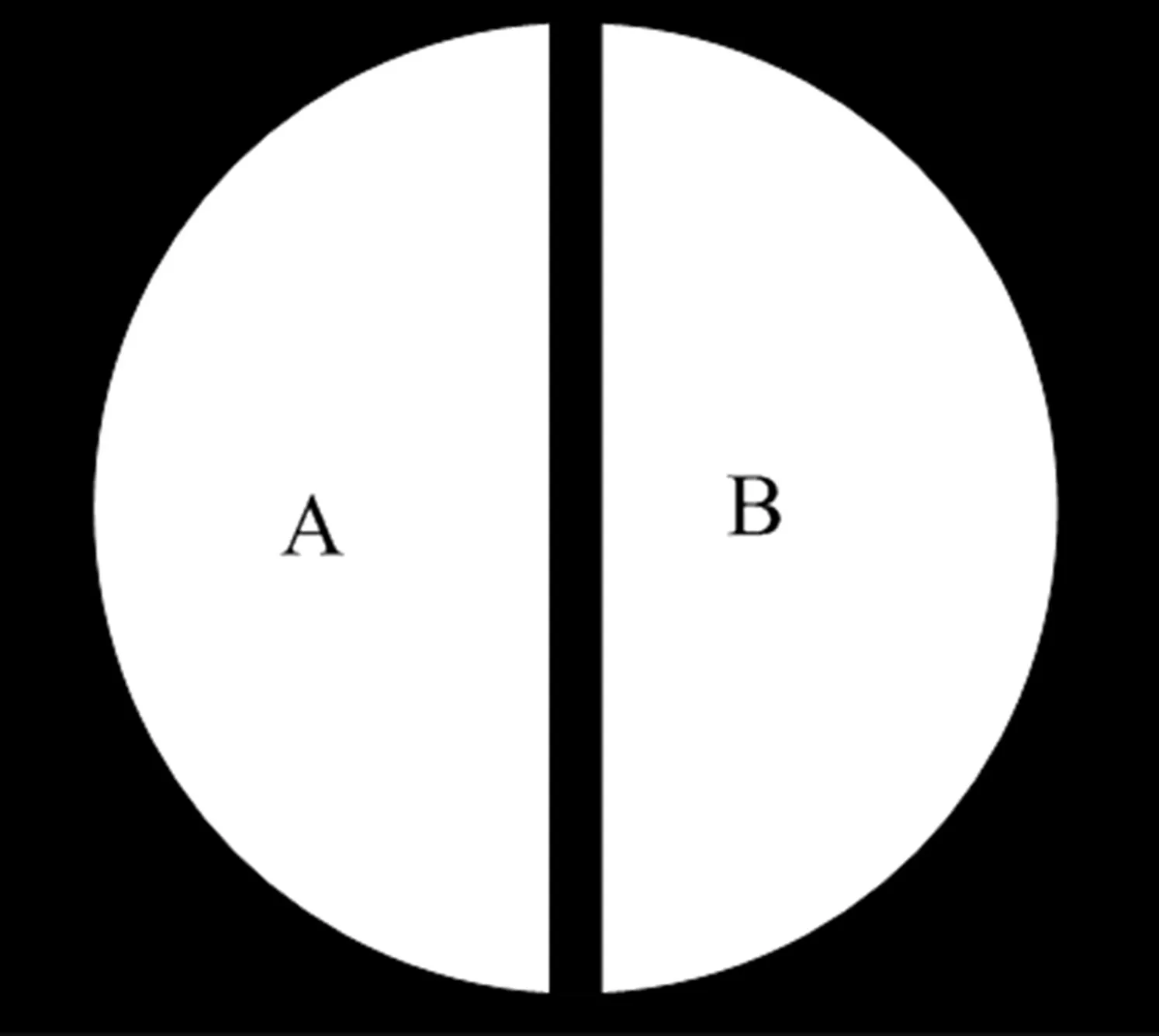
图9 双光阑示意图Fig.9 Schematic diagram of double aperture
通过设计挡板实现双光阑三种通光状态,挡板的宽度为50 mm,高度为100 mm,通过将挡板移动到不同的位置,可分别遮挡双光阑的A 和B 半光阑,也可全部遮挡和全部通光。 挡板移动通过挡板移动机构实现,挡板移动机构为一维平移台。
4 测量不确定度评定
4.1 相对光谱响应率测量不确定度评定
4.1.1 测量不确定度来源
1)测量重复性引入的不确定度分量u1,用A 类方法进行评定;
2)标准探测器引入的不确定度分量u2,用B 类方法进行评定;
3)信号采集表引入的不确定度分量u3,用B 类方法进行评定;
4)光路传输引入的不确定度分量u4,用B 类方法进行评定;
5)单色仪波长误差引入的不确定度分量u5,用B 类方法进行评定;
6)真空紫外光源不稳定度引入的不确定度分量u6,用B 类方法进行评定。
4.1.2 测量不确定度评定
(115~200) nm 探测器相对光谱响应率测量不确定度一览表如表2 所示。
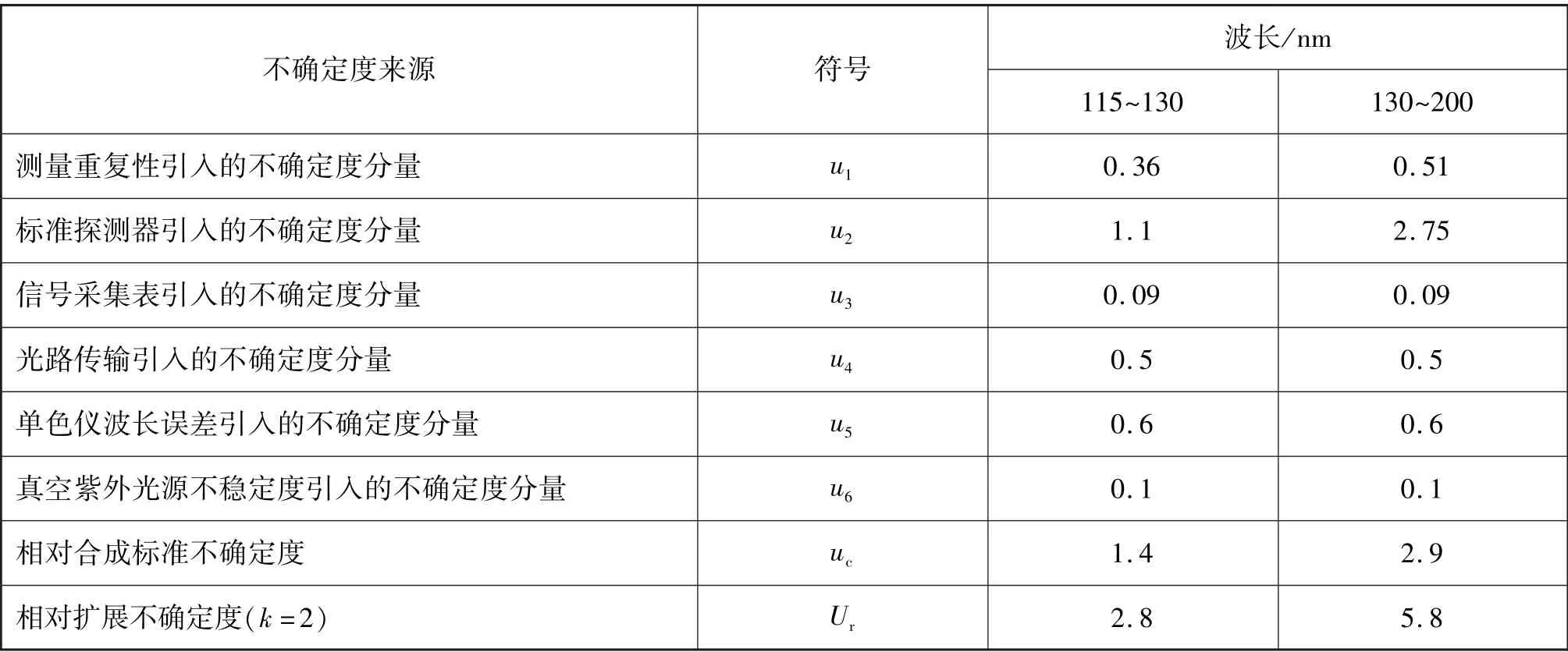
表2 (115~200) nm 探测器相对光谱响应率测量不确定度一览表Tab.2 List of uncertainties in measurement of relative spectral response rate of (115~200) nm detectors 单位:%
4.2 线性度测量不确定度评定
4.2.1 测量不确定度来源
1)测量重复性引入的不确定度分量u1,用A 类方法进行评定;
2)信号采集表引入的不确定度分量u2,用B 类方法进行评定;
3)真空紫外光源不稳定度引入的不确定度分量u3,用B 类方法进行评定;
4)探测器响应非均匀性引入的不确定度分量u4,用B 类方法进行评定。
4.2.2 测量不确定度评定
探测器线性度测量不确定度一览表如表3所示。
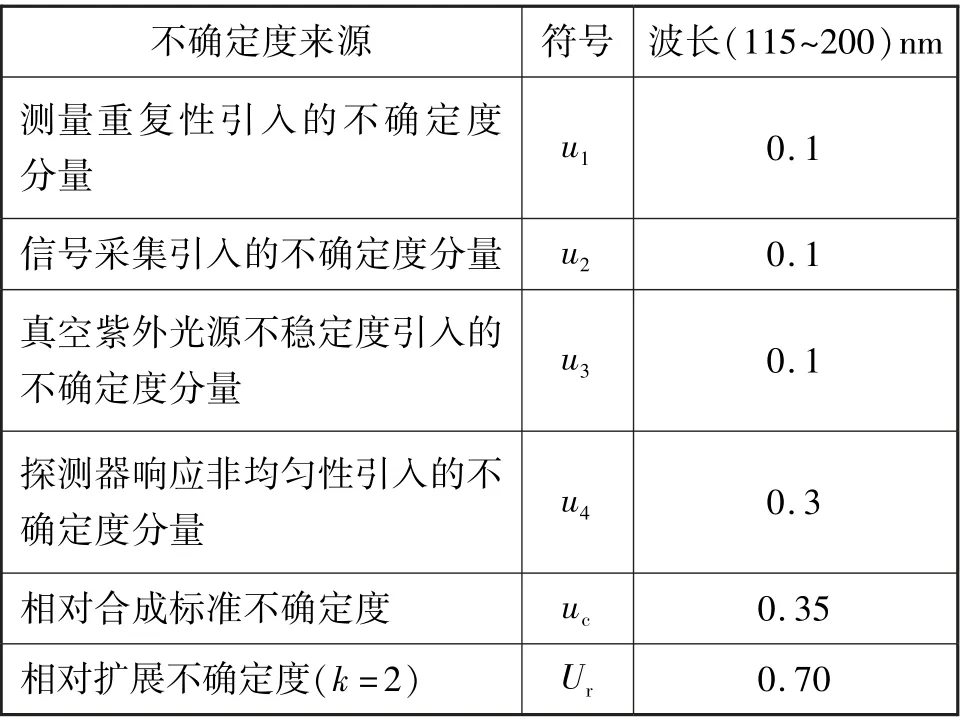
表3 探测器线性度测量不确定度一览表Tab.3 List of uncertainties in measurement of detector linearity measurement 单位:%
5 结束语
真空紫外探测器在空间探测领域内应用十分广泛,其量值准确与否直接关系到数据反演精度。通过该校准装置的研制,显著提升了真空紫外探测器光谱响应率校准的技术水平,同时实现了真空紫外波段探测器的线性度的校准,可以更好的满足当前国内真空紫外载荷研制单位的校准需要,技术指标先进,具有广泛的应用前景。
