基于导航姿态解算的光纤陀螺平台低频角振动测试方法研究
2023-01-03张金云景立博
张金云,姜 欢,景立博,王 汀
(1.北京航天控制仪器研究所,北京 100854;2.超精密航天控制仪器技术实验室,北京 100039)
0 引言
光纤陀螺平台作为测量载体姿态信息和视加速度的一种新型稳定平台系统,由光纤陀螺仪、石英加速度计、平台台体、支撑框架和稳定回路组成。安装在台体上的光纤陀螺仪敏感台体相对惯性空间的角速度,并通过稳定回路进行位置控制,使平台台体稳定在惯性空间[1-2]。光纤陀螺是一种新型全固态光电惯性仪表,具有寿命长、可靠性高和空间环境适应性好等显著优点,随着光纤陀螺工程化应用技术的成熟和精度的提升,逐渐可以在高精度惯性稳定平台上开展应用[3-5]。
惯导系统的动态性能直接影响惯性导航的精度和寿命,因此,惯导系统的动态性能测试技术越来越引起惯性技术界的重视。翟有新等[6]系统地分析了角振动条件对惯导系统误差的影响,并通过稳定回路动态仿真和角振动测试,验证了平台角运动与稳定回路动态刚度有十分密切的关系,提出了减小平台角振动的改进方案。周亚东等[7]对惯性平台角振动抑制技术开展了研究,基于理论分析和仿真验证,从六自由度角、线振动解耦着手,提出了在不改变平台系统线振动固有频率的情况下抑制角位移的减振方法。张志鑫等[8-9]对捷联惯组减振系统角振动、线振动共振频率理论开展了分析研究,通过建立捷联惯组减振系统的动力学模型,利用刚体动力学方法分析捷联惯组的转动惯量和回转半径,得出理想情况下捷联惯组减振系统线共振、角共振频率存在一定的比例关系,并与减振器安装中心到转动中心线的平均距离和惯组回转半径有关的结论。陈远才等[10-11]研究了一种基于角振动台的捷联惯导系统(Strapdown Inertial Navigation System, SINS)加速度计通道频率特性测试方法,该方法基于角振动台的正弦摇摆运动,利用加速度计的外杆臂效应实现对加速度计通道的频率特性测试。
针对光纤陀螺惯性平台的特点,本文提出了一种基于导航姿态解算的光纤陀螺平台低频角振动测试方法以提高测试精度。首先对角振动测试的基本原理进行了阐述,然后对光纤陀螺平台低频角振动的试验过程进行了说明,之后对光纤陀螺平台低频角振动的评价计算方法进行了研究分析,最后通过试验对该方法的科学性进行了综合验证。
1 角振动测试原理
光纤陀螺平台角运动动态特性指框架角传感器、平台和减振支架共同的角运动传递特性。开展角振动试验时,一般通过角振动台产生往复的机械角振动,即角加速度、角速度及角位移;该角振动特性通过与其固连的光纤陀螺平台角振动支架和平台减振器传递到光纤陀螺平台基座,带动不同轴向平台框架转动机构产生角运动,通过轴端摩擦而产生轴端干扰力矩,带动台体绕对应轴转动一定角度;台体上的光纤陀螺敏感到角速度,通过平台稳定回路控制台体反向转动以抵消干扰力矩,稳定台体姿态;平台框架转动机构产生的相对角度,经框架角传感器及其输出电路完成角运动测量输出。
光纤陀螺平台角振动特性测试相关环节如图1所示,通过对角运动测量输出函数x(t)和激励信号输出函数y(t)的特征提取分析,可以有效评价光纤陀螺平台的角振动特性。
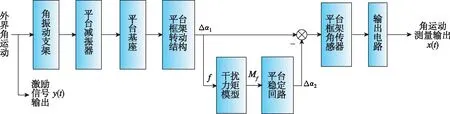
图1 光纤陀螺平台角振动试验传递环节Fig.1 Transfer link of angular vibration experiment of fiber optic gyroscope platform
对光纤陀螺平台角振动测试实质上是对光纤陀螺仪及稳定回路的考核。角振动试验过程中,光纤陀螺平台要建立惯性基准,需要将每一个坐标轴都稳定在惯性空间,而稳定回路就是用来抵御外界干扰力矩,使平台轴保持在惯性空间。光纤陀螺平台稳定回路控制平台台体隔离角运动并保持在惯性空间,基本原理是当平台受到扰动发生偏转时,光纤陀螺仪敏感到这个角速度信号而产生角速度输出,该角速度信号经过一系列信号处理后产生控制信号,该控制信号驱动平台偏转轴上的力矩电机向相反方向转动以平衡干扰力矩,从而使台体可以稳定在惯性空间[12-14]。
稳定回路是光纤陀螺平台中极其重要的组成部分。在光纤陀螺平台角振动过程中,转台环架带动平台基座角运动时,平台轴端会持续产生干扰力矩;通过稳定回路控制来抵消轴端干扰力矩,从而使得台体稳定在惯性空间。因此,稳定回路是减小台体角运动的关键。
光纤陀螺平台稳定回路包括台体、内环及外环稳定回路,内、外环需要进行信号分解,三条回路传递函数框图一致,如图2所示。

图2 光纤陀螺平台稳定回路框图Fig.2 Block diagram of fiber optic gyroscope platform stable loop
图2中,J表示平台框架转动惯量;Gfog(s)为光纤陀螺传递函数;Wc(s)为校正网络;Kp为功率放大器增益;Wm(s)为力矩电机;N0为光纤陀螺白噪声。
一般而言,光纤陀螺平台稳定回路带宽在200rad/s~350rad/s之间,低频角振动频率最高不超过50rad/s,远低于稳定回路带宽。因此,合格的光纤陀螺平台稳定回路可以完全适应低频角振动的动态环境。
2 低频角振动试验方法
试验时选用位置角振动台,该角振动台包含内环、中环和外环三个转动环,均能够360°连续转动,位置角振动台通过包含光电编码器和轴端电机的控制系统对各个环的转位和角振动进行控制。
光纤陀螺平台安装时,平台首先通过减振器安装在角振动支架上,再通过支架安装在角振动台上,用螺栓予以紧固,紧固时保证支架安装基准面与位置角振动台的定位销紧靠;平台在角振动台上安装好后,通过转接电缆及角振动台滑环与电控箱连接,电控箱再通过电缆与光纤平台地面测试系统连接;另外,电控箱与地面测试系统通信时需要通过串连转接盒,将飞行导航时的断调平差分信号引出并发送给角振动台控制柜的数据采集卡用于数据同步。光纤陀螺平台角振动测试系统组成如图3所示。
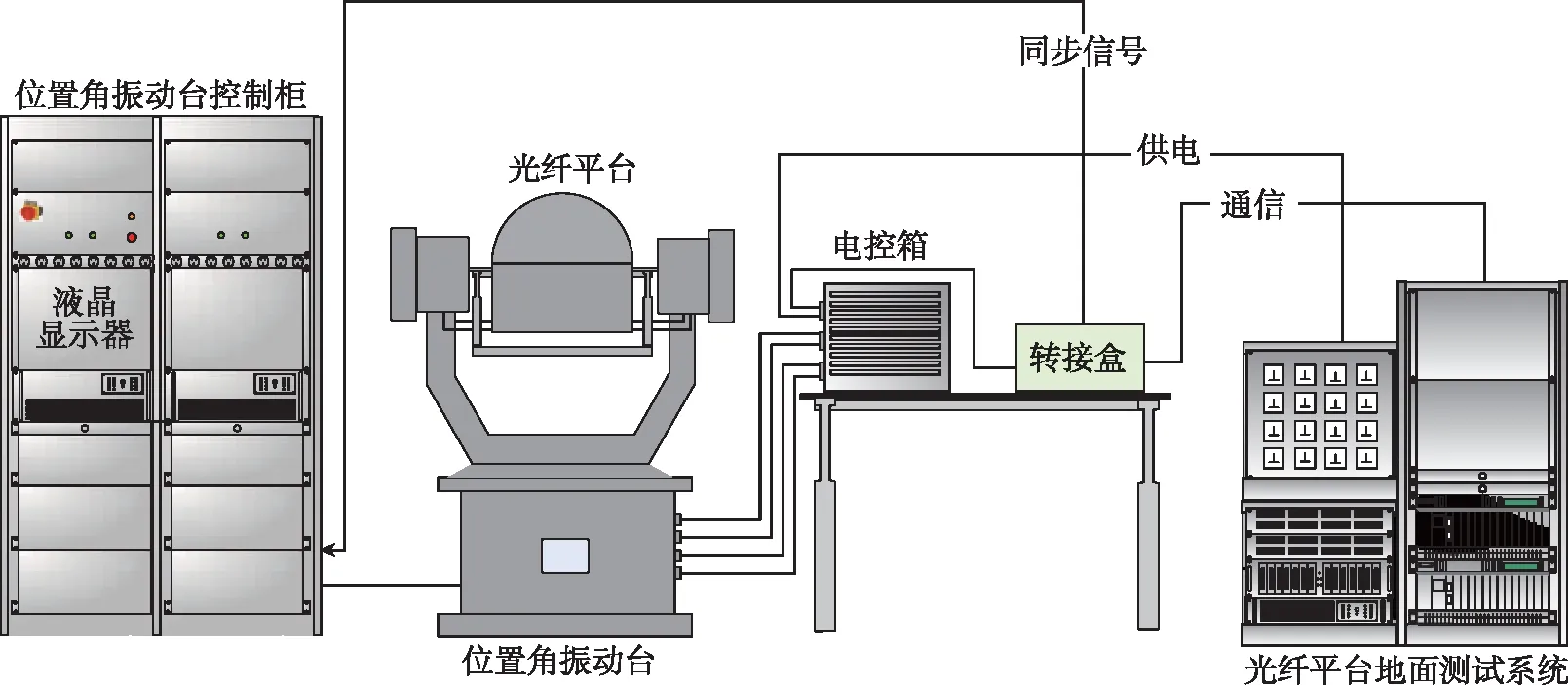
图3 光纤陀螺平台角振动测试系统Fig.3 Angular vibration test system of fiber optic gyroscope platform
光纤陀螺平台角振动测试系统组建好后开展试验,依次开展光纤陀螺平台Y轴(对应角振动台外环)、X轴(对应角振动台中环)和Z轴(对应角振动台内环)的低频角振动试验。光纤陀螺平台三轴角振动试验流程相同,以平台Y轴低频角振动试验的一个试验工况为例进行说明,试验流程如图4所示。
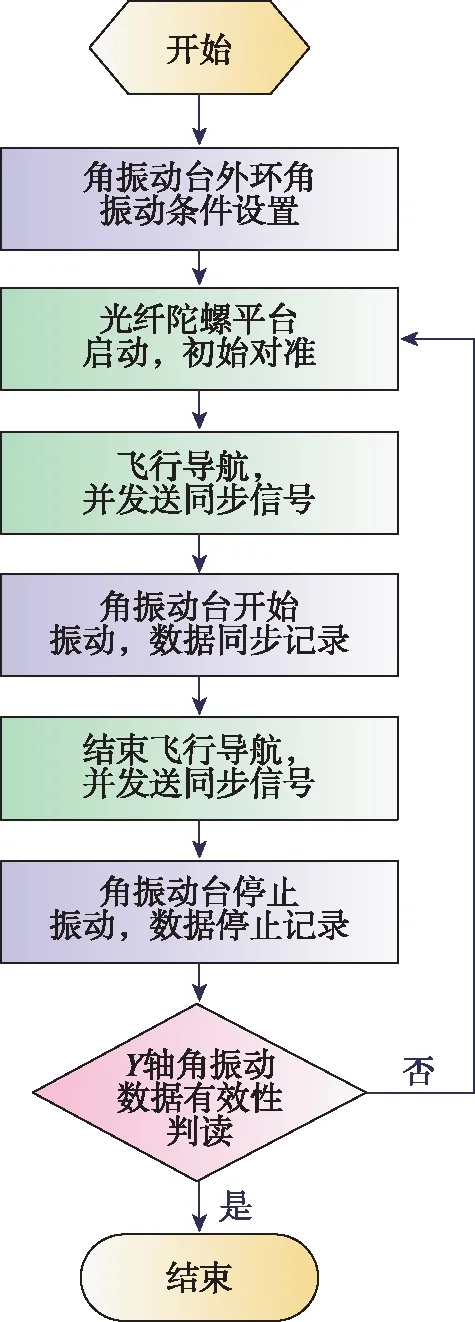
图4 光纤陀螺平台Y轴低频角振动试验流程图Fig.4 Angular vibration experimental flow chart of fiber optic gyroscope platform
角振动台外环按照角振动试验工况进行参数设置,光纤陀螺平台通过地面测试系统完成顺序启动后锁零,首先进行初始对准,完成后进行飞行导航测试;切换为飞行导航状态时,光纤平台会发送断调平差分信号,通过转接盒将该同步信号发送至角振动台控制计算机;角振动台控制计算机收到高电平后,角振动台外环同步开始角振动,同时角运动数据按照100Hz的采样频率进行后台存储;角振动试验完成时,通过光纤平台地面测试系统发送解除断调平指令,同步信号变为低电平,角振动台控制计算机收到该指令后停止数据记录,随后光纤陀螺平台结束飞行导航状态,该工况的角振动试验结束;之后对采集的光纤平台框架角数据和角振动台数据进行分析判读,确保数据的有效性和真实性。该工况完成后继续调整角振动试验条件,依次完成后续工况下的低频角振动试验。
3 低频角振动评价方法
为准确评价光纤陀螺平台低频角振动测试方法,需要对转台环架输出数据y(t)和平台框架角测量数据x(t)进行分析,以得到光纤陀螺平台角振动特性传递关系。通常对平台框架角测量数据x(t)的分析方法有两种:一种是直接对框架角曲线进行数据拟合,去除长期性趋势后提取其周期振动特征;另一种是对框架角曲线进行带通滤波,以得到其振动特性。
采用第一种方法分析时,由于光纤陀螺平台框架角漂移叠加了地速和陀螺漂移两方面的影响因素,角振动时间长时框架角曲线非线性特征显著,会对振动特征提取产生影响;采用第二种方法分析时,框架角数据经过带通滤波器后相位会产生一定延迟及变形,会对与角振动台数据的时间同步性产生影响。
综合考虑光纤陀螺平台工作模式及误差特性,为克服上述方法缺点,采用导航姿态解算方法得到光纤陀螺平台基座系相对于地理系的姿态,进而再对光纤陀螺平台稳定回路幅相特性进行分析,实现对其低频角振动特性的综合评价。
3.1 导航姿态解算
光纤陀螺平台系统导航是基于空间稳定的导航过程,空间稳定状态时平台台体稳定在惯性空间,陀螺不施加指令角速度,使得平台上的陀螺工作在自由状态[15]。选择“北天东”地理坐标系作为导航解算的参考坐标系,记为n,并且定义地球坐标系e、平台台体系p和平台基座系b。
导航解算方程可写为[16-17]
(1)


(2)
(3)
设平台台体在“北天东”地理系中的方位角、俯仰角和横滚角分别为ψ、θ和γ,这3个角的初值由初始对准获得,后续结果通过导航姿态解算得到,可表示为
(4)
设平台基座在“北天东”地理系中的方位角、俯仰角和横滚角分别为ψb、θb和γb,则

(5)
同时令
(6)
解算可得平台基座在地理系中的3个角
(7)
通过上述解算过程得到的γb、θb和ψb这3个角即为平台基座角度信号,可分别代替平台框架角测量数据x(t),用于后续幅相特性分析计算。
3.2 稳定回路幅相特性分析
外界激励角运动信号作用在光纤陀螺平台基座上引起平台框架转动,由于轴端摩擦产生干扰力矩,引起台体的相对转动;光纤陀螺会敏感到转动激励信号,在稳定回路的作用下台体可以保持稳定,而平台各框架角表现出受激波动;根据角振动台环架数据和叠加对应激励信号后的平台框架角,利用基于相关关系的幅相解算方法可得到稳定回路幅相特性。
设平台基座角度信号为x(t),角振动台激励角度信号为y(t)。这两个同频异相的随机信号表示如下
x(t)=Asin(ωt+θ+φ)+Nx(t)
y(t)=Bsin(ωt+θ)+Ny(t)
(8)

稳定回路幅相解算可以采用平稳随机信号的相关计算法,相关函数描述了某一时刻t瞬时值与另一时刻t+τ瞬时值的依赖关系,在使用相关计算法时,信号应为平稳信号,因此需要对式(8)中的两个信号进行平稳性分析。
对于平台基座角度信号x(t)求期望
E[x(t)]=E[Asin(ωt+θ+φ)+Nx(t)]
(9)
E[x(t)]=E[Asin(ωt+θ+φ)]+E[Nx(t)]
(10)
(11)
其自相关函数为二阶矩运算
Rx(t,t+τ)=E[x(t)x(t+τ)]
(12)
即
Rx(t,t+τ)=E{[Asin(ωt+θ+φ)+Nx(t)]·
[Asin(ω(t+τ)+θ+φ)+
Nx(t+τ)]}
(13)
将式(13)展开
Rx(t,t+τ)=E[A2sin(ωt+θ+φ)sin(ω(t+τ)+
θ+φ)]+E[Nx(t+τ)Asin(ωt+
θ+φ)]+E[Nx(t)Asin(ω(t+τ)+
θ+φ)]+E[Nx(t)Nx(t+τ)]
(14)
x(t)信号中噪声部分与三角函数部分相互独立,因此式(14)中第二项和第三项均为0,得到
Rx(t,t+τ)=E[A2sin(ωt+θ+φ)sin(ω(t+τ)+
θ+φ)]+E[Nx(t)Nx(t+τ)]
(15)
Rx(t,t+τ)=
RNx(τ)
(16)
(17)
可以看到,平台基座角度信号x(t)均值为0、自相关函数只与其采样时间间隔有关,因此符合宽平稳条件,式(17)可表示为
(18)
同理,对于角振动台激励角度信号为y(t),同样满足
(19)
对于平台基座角度信号x(t)和角振动台激励角度信号为y(t)的互相关函数
Rxy(t,t+τ)=E[x(t)y(t+τ)]
(20)
即
Rxy(t,t+τ)=E{[Asin(ωt+θ+φ)+Nx(t)]·
[Bsin(ω(t+τ)+θ)+
Ny(t+τ)]}
(21)
将式(21)展开,由于噪声部分与三角函数部分相互独立,且Nx(t)和Ny(t+τ)独立同分布,因此有
Rxy(t,t+τ)=E[ABsin(ωt+θ+φ)·
sin(ω(t+τ)+θ)]
(22)
Rxy(t,t+τ)=AB·
(23)
最终可得
(24)
求解光纤陀螺平台稳定回路幅相特性,当τ=0时,代入式(18)、式(19)和式(24)分别可得
(25)
(26)
(27)
因此,稳定回路幅值和相位分别为
(28)
(29)

4 低频角振动试验数据分析
上述基于导航姿态解算的光纤陀螺平台低频角振动测试方法,针对光纤陀螺平台每个轴向分别开展了四种试验工况的试验,低频角振动频率分别为1rad/s、10rad/s、20rad/s和30rad/s,幅值均为0.15°。光纤陀螺平台不同试验工况下三轴低频角振动时的幅值和相位特性如图5所示。
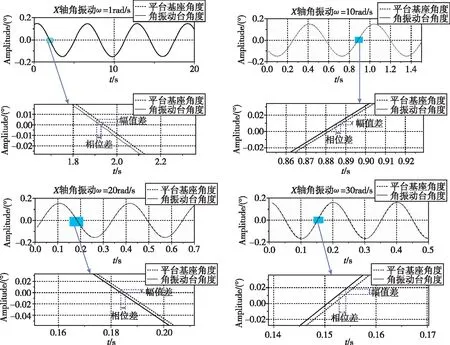
(a) X轴角振动
图5中虚线表示平台基座角度信号x(t),实线表示角振动台激励角度信号y(t),不同角振动频率均选择2~3个周期进行显示。当光纤陀螺平台X轴角振动时,平台基座角度为横滚角γb;当光纤陀螺平台Y轴角振动时,平台基座角度为方位角ψb;当光纤陀螺平台Z轴角振动时,平台基座角度为俯仰角θb。
通过局部放大视图能够明显看到,平台基座角度x(t)和角振动台角度y(t)曲线幅值及相位的差异。不同角振动频率下光纤陀螺平台3个轴稳定回路幅值和相位计算结果如表1所示。
由表1可见,对于四种试验工况的光纤陀螺平台三轴低频角振动试验,基于导航姿态解算得到的光纤陀螺平台稳定回路幅相裕度均满足低频角振动设计要求指标,表明平台稳定回路能够有效隔离低频角运动,并且动态性能完全可以适应低频角动态环境。
5 结论
基于导航姿态解算的光纤陀螺平台低频角振动测试方法,通过飞行导航过程中的断调平差分信号实现角振动激励信号与平台框架信号的时间同步,基于惯性平台导航解算和坐标投影转换得到平台基座相对于地理系的准确姿态,并结合稳定回路幅相特性分析评估光纤陀螺平台的低频振动特性。试验结果表明,该方法克服了姿态小角度的约束与滤波带来的相位延时问题,通用性强,可以准确评价光纤陀螺平台的低频角振动特性。
