基于计算机视觉对基坑变形监测的运用分析
2023-01-02邓树密
李 俊, 邓树密, 唐 堂
(1.中国水利水电第十工程局有限公司, 四川成都 610072;2.四川华腾公路试验检测有限责任公司,四川成都 610031)
我国地铁交通的高速发展,大型基坑不断涌现,这对基坑的安全施工和安全运营提出了更高的要求,特别是对基坑位移监测系统的高精度监测日趋突显出其重要性。目前主要是人工使用全站仪或是水准仪进行位移监测,存在效率低、目视误差大的问题,监测精度和监测持续性都不能达到要求,且由于夜间或是恶劣天气不便于监测,无法做到24 h的监测。计算机技术、微电子技术以及大规模集成电路的发展,极大地提高计算机视觉技术和图像采集设备的性能,在很多实际工程项目中采用计算机视觉对结构位移进行监测,取得了良好的效果[1-3]。基于接触式的位移传感器、全站仪等变形监测技术在工程项目中有广泛的运用,但也存在不同程度的局限性,如受环境影响大,对现场施工存在干扰等。计算机视觉智能测量系统采用物联网技术及智能灾变识别算法将视频数据转化为变形数据,实现对结构物的超高精度非接触式实时测量,达到对结构物健康状况全天候监测的目的。
计算机图像视觉具有远距离、非接触、高精度、省时省力、多点监测等众多优点。该方法主要是用相机拍摄被测结构视频、进行目标追踪处理以得到测点在图像中的运动轨迹,再通过图像与现实世界的几何关系确定结构的位移信息。本文结合锦城广场P+R 地下停车场项目基坑施工过程中自动变形监测工程实例,计算机图像视觉对基坑侧壁沉降和水平位移监测进行了研究和探讨。
1 计算机视觉位移监测系统组成及原理
计算机视觉位移监测系统是一种无接触、快速测量技术,是实现测量自动化和智能化有效工具,具有安全可靠和效率高等突出优点。采用基于机器视觉的位移监测系统组成,包括远摄镜头的前端固定连接有非可见光滤镜,远摄镜头的后端固定连接有机器视觉传感器,机器视觉传感器下方固定连接有伺服电机,机器视觉传感器和伺服电机分别与微电脑处理器数据线连接,微电脑处理器还与数据远传模块数据线连接,多个非可见光标定物固定在机器视觉传感器监测的建筑基础上,数据远传模块与远程数据接收模块无线连接,远程数据接收模块上设置有报警模块。
在待测结构物上布观察靶标,通过机器视觉智能测量仪识别结构物上的靶标图像,当被测结构物发生位移时,靶标坐标随之变化,从而测量到被测物的水平与垂直双向位移。监测系统通过内置的图像增强边缘计算软件将图像转化为二维位移数据,无线上传至远程在线监测云平台,供工作人员实时了解现场结构物的工作状况。
本视觉测量技术核心是运用基于计算机图像处理方法对采集图像信号进行处理,分析图像信息,并提取图像的尺寸、角度、面积、位置等特征,同时结合相机计算出目标的空间位置坐标[4]。为了消除图像光照不均匀,首先对RGB数字图像灰度处理,再通过滤波去除相应噪声,利用相关算法识别靶点区域,获取最优靶点中心坐标。为提高识别精度,合理设置相机内参数、外参数和畸变参数,并采标定方法补偿相机标定误差。最后,建立基于实际测量对象分析类别,通过三维相似性进行对象识别,从而实现实时测量。靶点算法框架如图1所示。

图1 多目标优化靶点中心算法框架
该监测系统为提高测量系统的识别精度,采用K-Means算法应用于基坑位移监测中的光靶边缘提取。对于镜头径向畸变、倾斜几何变形导致的系统的误差,监测系统通过相机内参数与外参数求解目标像素坐标(图像坐标系)到场景坐标(世界坐标系)变换来减少误差。同时,对于目标的观察靶标中心位置估算,利用高斯中心法,假设光靶中心的像素点分布满足高斯概率分布,估计出参数后,用高斯模型反向估计观察靶标中心位置,从而快速识别。当试系统于目标图像存在相对位移时,靶点中心的位移实时传输回系统显示位移量值的变化。 测点系统原理如图2所示。
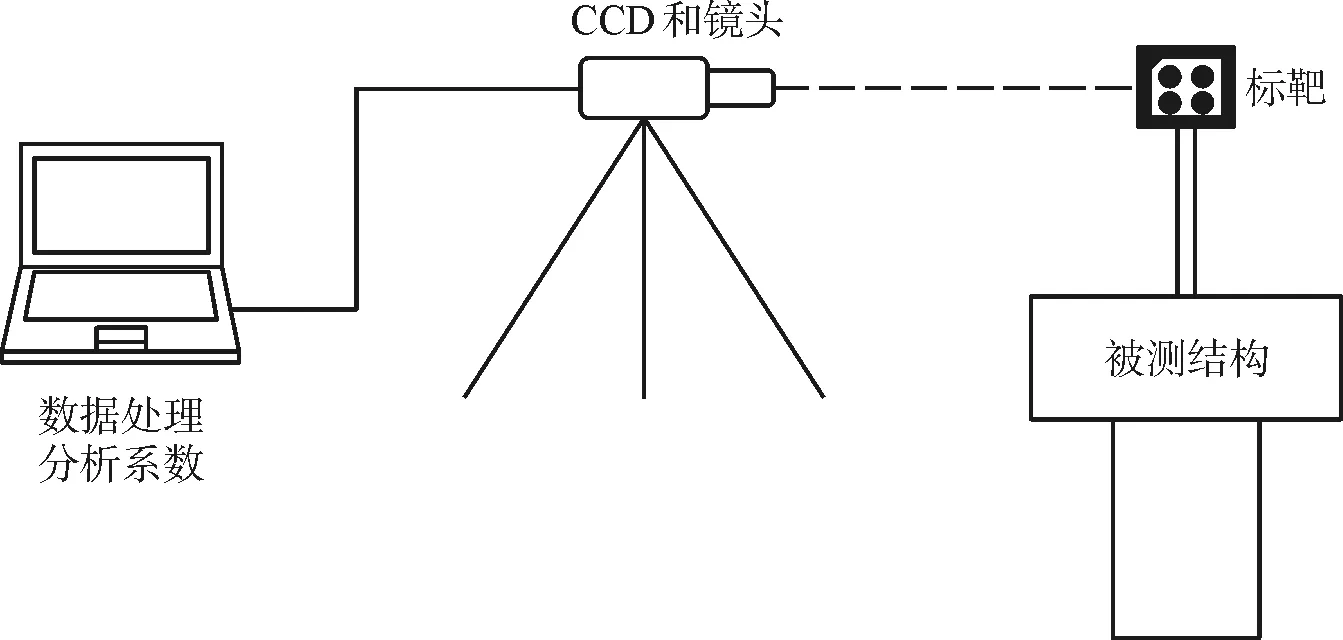
图2 测点系统原理示意
2 工程实例
锦城广场综合换乘服项目位于成都市高新南区大魔方南侧,绕城高速北侧,西临环球中心,东临科华南路,见图3 。场地内共有 3 条城市轨道交通线穿过,地铁 29 号线,16 号线和18号线。锦城广场站土层分布如图4所示。
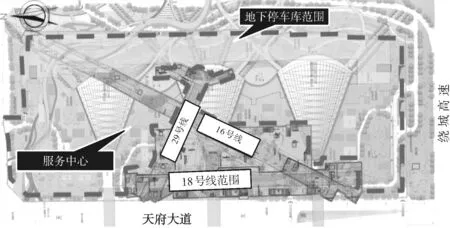
图3 基坑现场
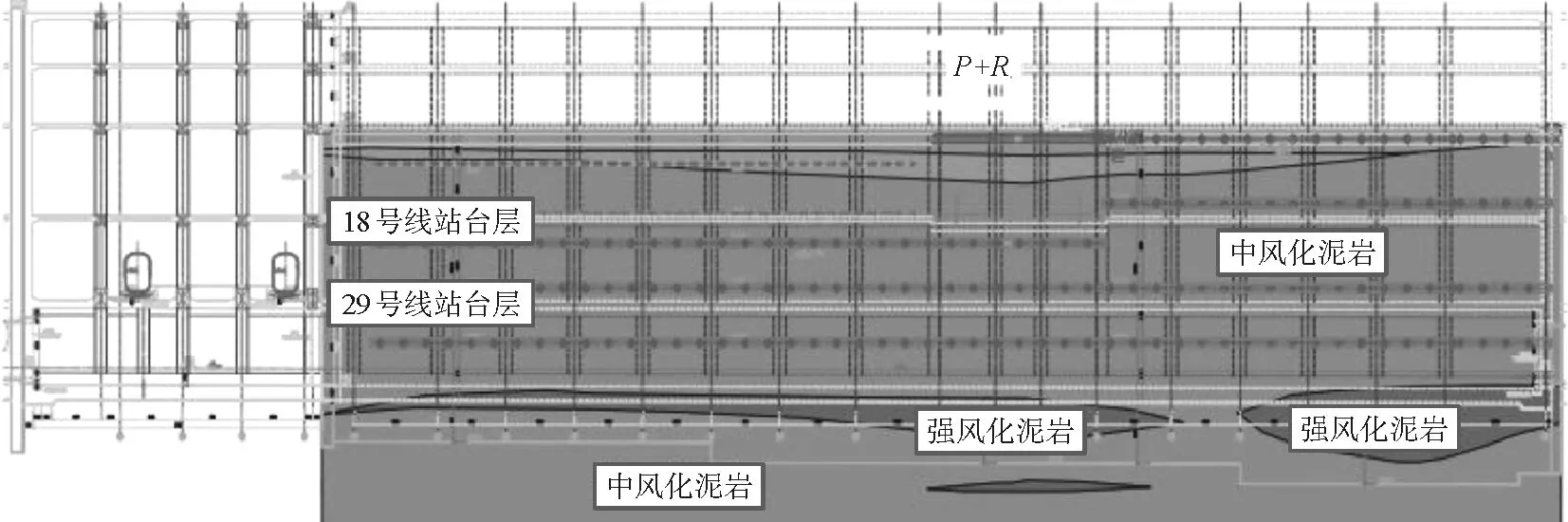
图4 锦城广场站土层分布概况
3 监测方案
在本项目中,为准确获取基坑开挖过程中,采用机器视觉测量的技术既有结构支护的位移变化情况。通过计算机图像视觉处理系统获取靶点图像,利用图像处理分析技术对靶点中心位移进行计算,得出测点随基坑开挖各个阶段下各测点的变形位移值、进而计算测点位移速率和统计累计位移量。根据获取的实时监测数据对监测点进行计算分析,当基坑控制测点变形情况超过方案设置的变形预警值时,该监测系统将会预警,供监测人员分析判断基坑安全性。综合换乘车站群建模分布如图5所示。

图5 综合换乘车站群建模分布示意
3.1 监测测点
监测项目和监测位置要求应满足GB 50497-2009《建筑基坑工程监测技术规范》和JGJ8-2016《建筑变形测量规范》文件相关规定,本工程监测方法及精度要求如表1所示。
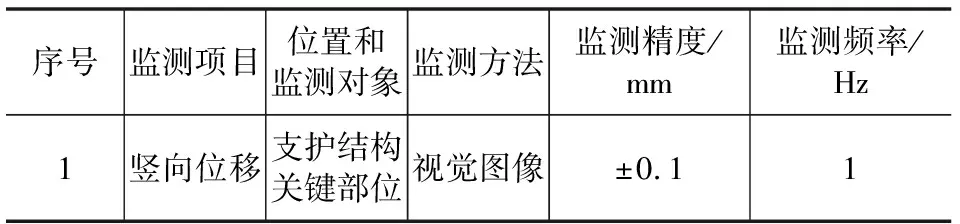
表1 基坑变形监测项目
经过计算得到18号线锦城广场站既有车站结构竖向变形云图如图6所示。
由图6可知,锦城广场综合换乘服务中心三角换乘区域施工过程中,土体开挖会造成18号线既有车站结构产生一定的竖向沉降。当三角区盖板位置开挖3 m和6 m时,18号线既有车站结构竖向沉降区域集中在通道一期位置,主要位于基坑开挖位置上方。通过对计算数据的分析处理,得到基坑在开挖关键工况下竖向变形理论值,如表2所示。

图6 18号线既有车站结构竖向变形云图(单位:mm)
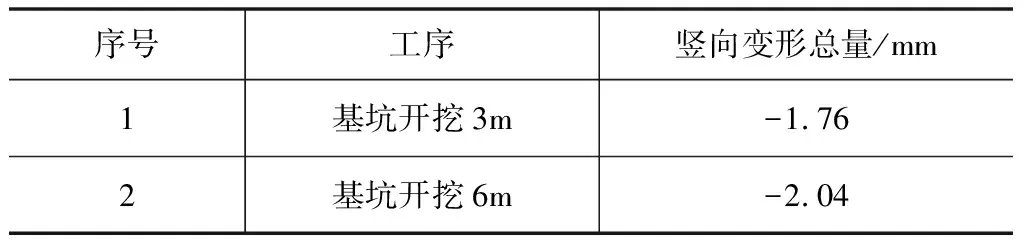
表2 18号线既有车站结构竖向变形总量
锦城广场综合换乘服务中心三角换乘区域施工过程中,基坑土体开挖3 m时,18号线既有车站结构产生1.76 mm竖向沉降。当开挖6 m时,18号线既有车站结构竖向沉降达到2.04 mm。位移变化量0.28 mm,增大了16%。
4 监测结果分析
本项目采用上述基于计算图像视觉监测设备,分析基坑土体开挖会造成18号线既有车站结构产生的竖向沉降,结合计算模型中基坑最大变形量的关键位置,对18号地铁线对应基坑的CX6~CX8安装了3个视觉图像测试点进行监测。现场测试如图7所示。通过对7天不间断连续监测变形,测试见图8。
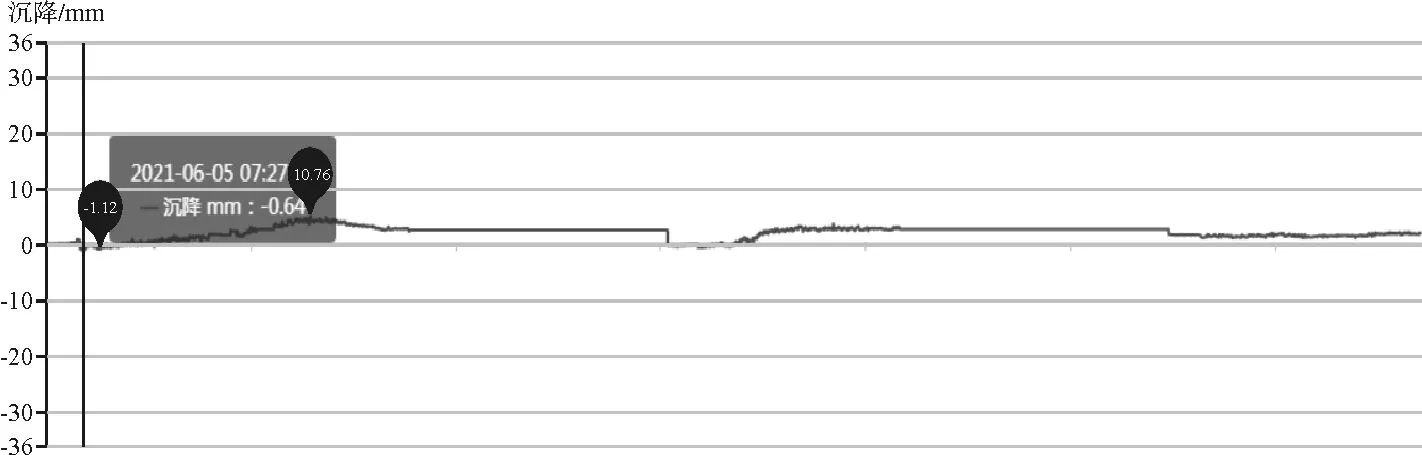
图7 现场测试
由图8可知,图像测点应变在7天168 h内(2021-6-5~2021-6-12),最大沉降1.80 mm,未超过安全预警值,表明基坑在外部作用下结构位移处于稳定状态。在测试过程中,测试设备工作正常,性能稳定,测试数据能准确反映结构变形特征。
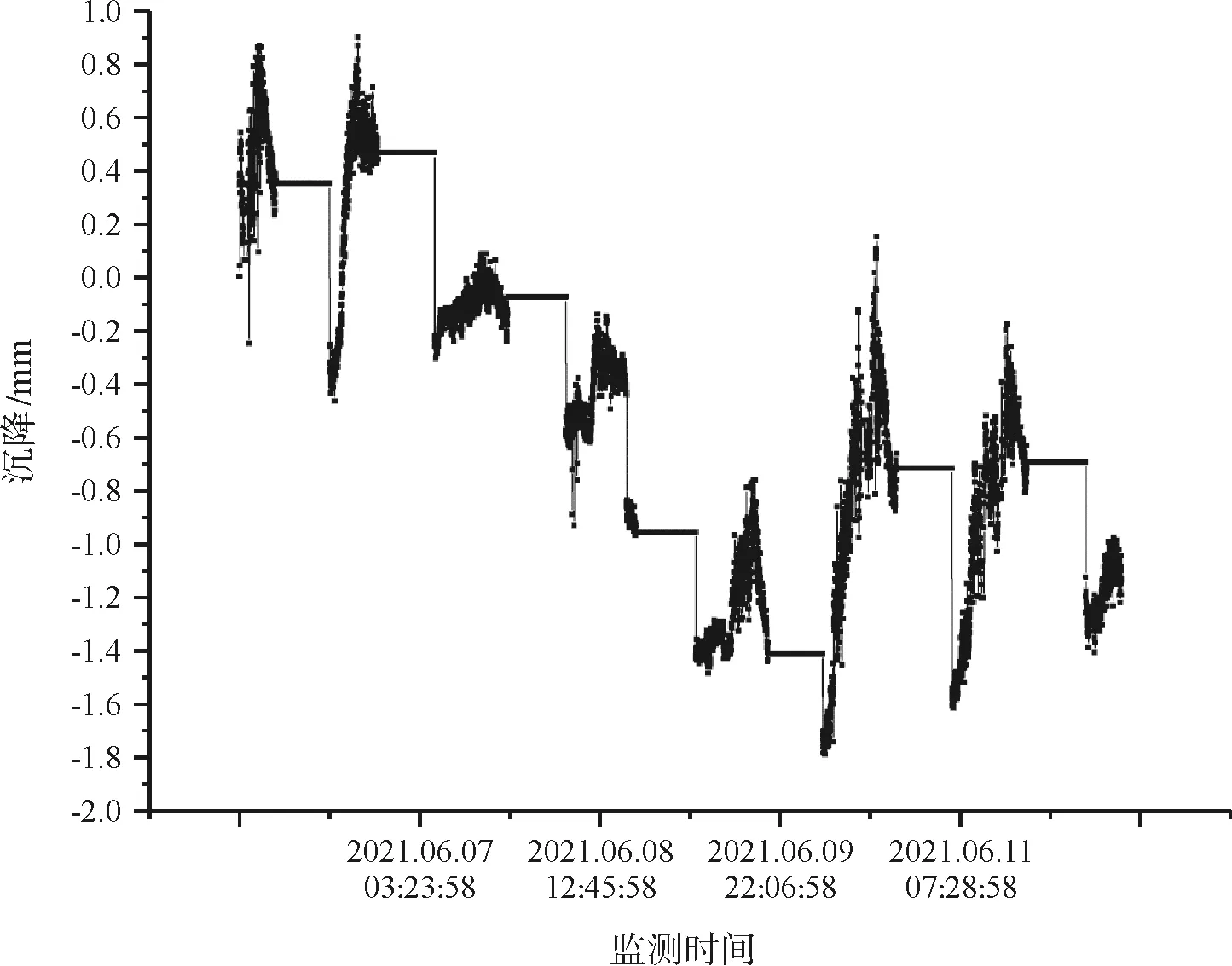
图8 CX8水平位移随时间变化曲线(2021-6-5~2021-6-12)
5 结论
本项目中采用一种基于机器视觉的非接触式对基坑变形位移测量方法,结合基坑现场测试验证了该方法的可行性和有效性。计算机图像视觉对结构位移的监测室非接触、高精度、实时采集分析的特点,能够对结构的微小变形进行测量。该测量方法可推广用于其他结构的位移测量,为我国建筑结构的运行安全监测提供一定的技术支持。
