基于多旋翼无人机的架空输电线路状态检测系统设计
2022-12-26郑仟
郑 仟
(宁夏超高压电力工程有限公司,银川 750000)
0 引言
架空输电线路由导线、绝缘子、杆塔等组成,是一种架设于地面上的电能传输线路,是电力系统不可或缺的组成部分[1]。架空输电线路通过绝缘子以及空气进行绝缘,因此在自然环境中进行长时间运行后[2],容易受到气象以及自然环境等因素影响,发生损坏甚至故障,严重时会造成电网停电现象。对架空输电线路状态进行定期检测是提高其运行可靠性的一种有效手段[3]。由于架空线路的建设环境均处于较为偏僻或者森林和高山之中,导致其状态人工检测的难度较大[4]。借助于无人机技术,可以有效解决上述问题。无人机不仅可以实现自由升降和悬停,还具有摄像以及拍照的功能,可以在实现自主巡检的基础上,对架空输电线数据进行全方位的采集,因此可以满足架空输电线路检测的要求。
文献[5]提出考虑时变故障率的架空输电线路状态检测方法,在考虑状态检测成本、故障损失成本以及可靠性成本的情况下,将综合效益最大作为约束条件,构建架空输电线路状态检测的目标函数,采用遗传算法求解目标函数,完成架空输电线路状态的检测。文献[6]提出改进CenterNet的输电线路状态检测方法,该方法采用深层特征融合网络对输电线路的常见的绝缘子自爆、防震锤脱落以及鸟巢故障特征进行训练,输出最终的状态检测结果。文献[7]提出基于形态学和SVM的输电线路状态检测方法,该方法采用形态学方法对输电线图像进行滤波处理,并将滤波后的图像输入到支持向量机中进行分类,完成输电线路状态的检测。文献[8]在考虑电力系统可靠性、稳定性与经济性的条件下,设计一种能够有效识别输电线路缺陷的算法,采集合闸状态下输电线路的运行状态信息,通过分类算法完成输电线路缺陷的检测。文献[9]提出基于深度学习的无人机电网线路缺陷状态检测方法,该方法构建多尺度特征金字塔,将特征金字塔与主干网络融合,构建深度融合下的电网缺陷状态检测模型。通过求解状态检测模型,即可获得最终的缺陷状态检测结果。
上述方法均可完成架空线路状态检测,但是在应用过程中,由于未能获得架空输电线路实际情况信息,导致状态检测结果精度不足。因此,本文结合架空线路的建设特点和环境特点,研究基于多旋翼无人机的架空输电线路状态检测方法。
1 架空输电线路状态检测系统架构及原理
1.1 检测系统架构
多旋翼无人机具有良好的可操控性,并且能够在复杂环境中进行任务的执行,因此,本文结合架空线路的建设环境特点,研究基于多旋翼无人机架空输电线路状态检测方法,该方法以架空线路状态检测的标准流程为基础,结合线路状态的检测需求,完成架空线路状态检测,该方法的整体架构如图1所示。
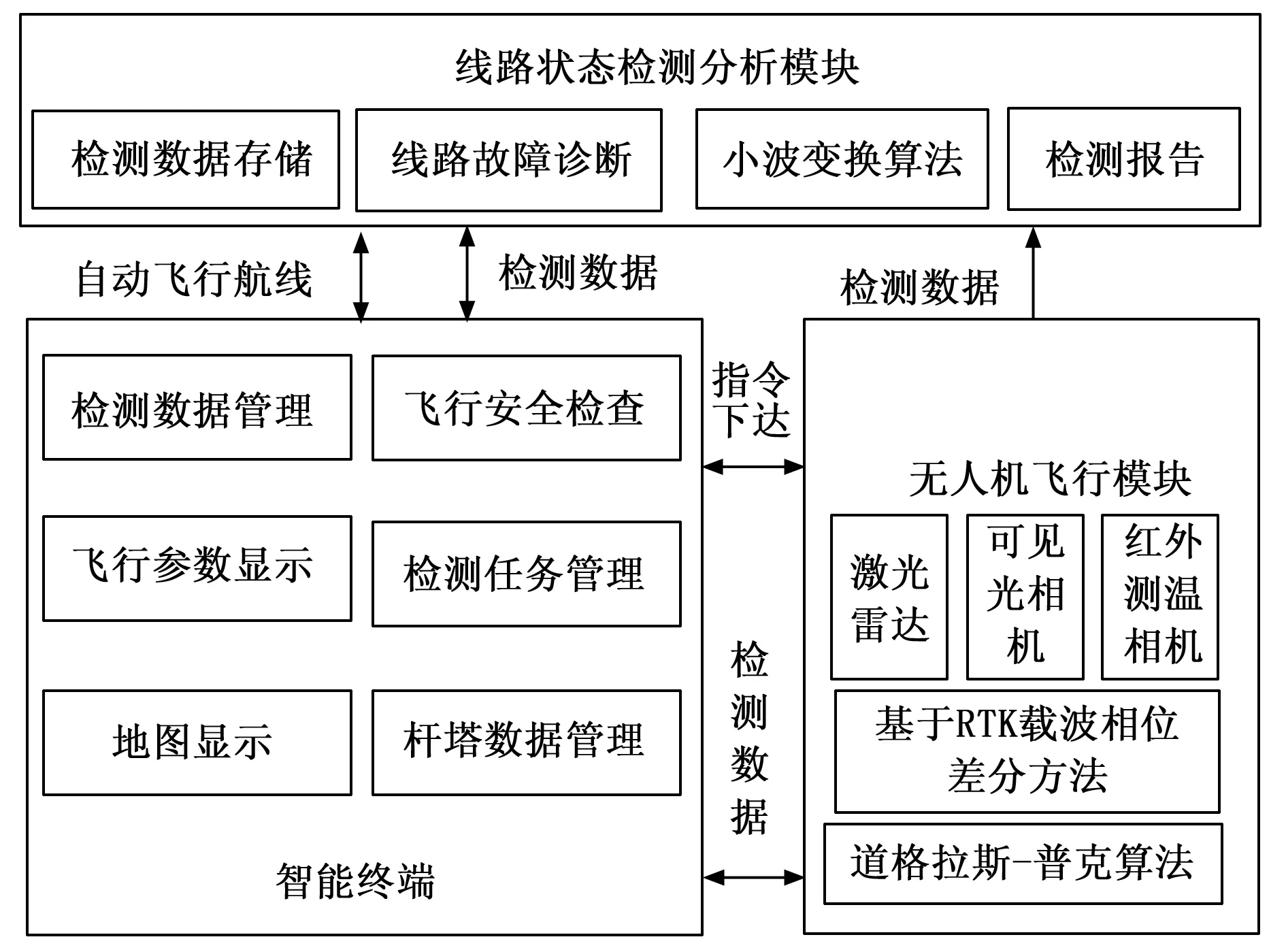
图1 基于多旋翼无人机架空输电线路状态检测方法架构
从图1中可以看出,检测架构中共包含3个主要结构,分别为智能终端、无人机飞行模块以及线路状态检测分析模块。由线路状态检测作业模块发送无人机飞行线路信息至智能终端模块,智能终端模块接收该信息后,对无人机实行智能控制。同时,向线路状态检测作业模块传送无人机飞行检测作业数据,该模块接收该数据后,对其进行计算和分析,判断架空线路状态,完成架空输电线路状态检测。
1)智能终端:智能终端的主要作用是向无人机发送检测指令与飞行控制指令,并且具有控制无人机飞行状态以及呈现检测架空输电线路三维地图的功能。智能终端的原理如图2所示。

图2 智能终端框图
从图2中可以看出,智能终端包括STM32主控模块、电源模块、LCD显示屏以及扩展接口等。其中,STM32主控模块对智能终端内的电源、显示屏等模块进行控制。通过以GPRR模块为核心建立的通信链路,BD/GPS接收器可以对卫星通信信号进行接收。LCD显示屏可以对多旋翼无人机的各项检测数据进行显示,便于通过人机交互进行杆塔数据的管理。
2)无人机飞行模块:该模块也称为机载模块,以多旋翼无人机为核心,搭载激光雷达、可见光相机以及红外测温相机等设备,采集架空输电线路运行状态图像数据。在无人机两侧部署线路信号勘测装置,采集架空线路的运行电流信号。无人机在检测过程中,采用基于RTK载波相位差分方法实现无人机的精准定位,保证定位误差等级处于厘米级。通过道格拉斯-普克算法对无人机飞行的航迹点实行冗余处理,保证无人机的高效检测。
3)线路状态检测分析模块:该模块的主要作用是完成无人机检测采集数据的存储、分析和管理。依据无人机采集的图像信息和信号信息对线路的运行状态实行匹配和分析[10],获取异常线路结果,并生成检测报告。
1.2 检测原理
通过多旋翼无人机进行架空输电线路状态检测,主要通过机载监测终端与线路状态检测分析模块组成,如图3所示。

图3 多旋翼无人机架空输电线路检测原理
从图3中可以看出,整个架空输电线路检测原理中需要用到的主要技术有北斗卫星导航定位技术、无线通信技术以及计算机技术。
在多旋翼无人机上安装机载检测终端,根据接收到的巡检、定位信号,对架空输电线路的状态信息进行采集,并通过无线传输的方式将采集的信息传输至线路状态检测分析模块,该模块负责进行线路状态的检测分析。
智能终端上电后,接收卫星通信信号,调节多旋翼无人机的飞行高度,根据与监管中心的传输链路,将监测到的线路传输从环志监管中心,监控中心根据实际的状态检测要求,将数据采集指令通过链路传输至无人机,实现对架空输电线路的数据的持续性采集,并实时显示无人机的飞行状态,确保数据采集的可靠性。将无人机获得的监测数据存储到监控中心的数据库,便于后续的调用与计算。
2 架空输电线路状态检测
2.1 航线规划流程
多旋翼无人机在进行架空输电线路状态检测时,无人机飞行模块接收智能终端模块的检测指令后,先制定巡检飞行线路后,对航线实行控制[11];并且处理无人机飞行的冗余航迹点,保证多旋翼无人机的高效巡检。多旋翼无人机架空输电线路状态巡检航线规划流程见图4。
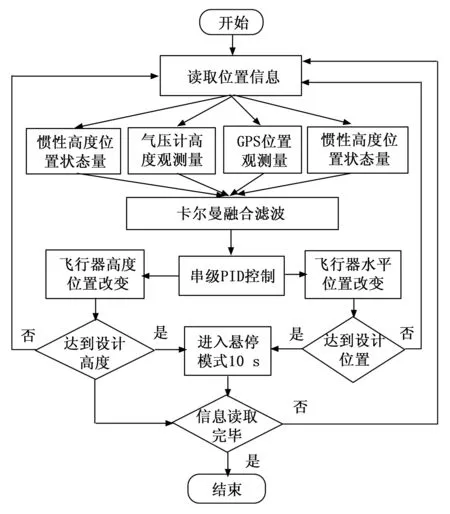
图4 多旋翼无人机输电线路状态巡检航线规划流程
多旋翼无人机在检测前,需先读取自身位置以及待检测的架空输电线路位置[12],并设定无人机的飞行高度。多旋翼无人机起飞并达到设定高度后,无人机进入主动巡检模式,按照设定的检测航线开始进行架空输电线路检测。
2.2 巡检航线控制
多旋翼无人机在进行架空线路巡检过程中,需精准控制无人机的飞行位置,以此保证检测采集的图像和信号数据的可靠性和精准性。由于电力系统环境中存在明显的电磁场[13],对无人机的飞行稳定性和精准性造成一定影响。因此无人机飞行模块为保证无人机检测过程中的航线精准控制,采用基于RTK载波相位差分方法对无人机的巡检航线定位实行控制,保证无人机能够在厘米级误差下,完成线路检测。
无人机在检测过程中,其飞行位置与架空输电线路之间的距离越小,检测效果越佳[14]。但是,依据无人机的飞行安全标准,需保证其巡检时和待巡检路线中心之间的水平距离Da,其公式为:
(1)
式中,L表示架空线路杆塔的横担长度;M表示架空输电线路的安全距离。
多旋翼无人机飞行时和地面之间垂直距离Ha的计算公式为:
(2)
式中,H表示架空线路杆塔高度;α表示无人机机载激光雷达的开角。
为保证无人机航线的控制效果[15],依据无人机搭载的激光雷达和塔高之间射程,确定多旋翼无人机巡检飞行的实际风行最佳高度h,其计算公式为:

(3)
式中,R表示激光雷达的射程;i表示飞行次数。
依据上述步骤即可完成多旋翼无人机检测航线控制,保证无人机的飞行航线控制效果。
2.3 冗余航迹点去除
采用道格拉斯-普克算法,处理无人机飞行航线中的冗余航迹点。道格拉斯-普克算法能够在保证检测效果的前提下,去除冗余航迹点,保留关键航迹点,不改变多旋翼无人机整体的航迹形态特征。该算法的详细步骤如下所述:
1)设定多旋翼无人机检测起点和终点坐标分别用A(x1,y1,z1)和B(x2,y2,z2)表示,两点之间的直线用AB表示,则确定AB的空间直线方程,其公式为:
(4)
式中,x、y、z表示AB上不同方向的坐标。
2)如果i点坐标用Pi(xi,yi,zi)表示,其与AB之间的垂直距离用di表示,其计算公式为:
di=
(5)
3)如果无人机航线中存在的航迹点数量为n,获取航迹点和AB之间的最大距离结果dmax,其公式为:
dmax=max(d1,d2,...,dn)
(6)
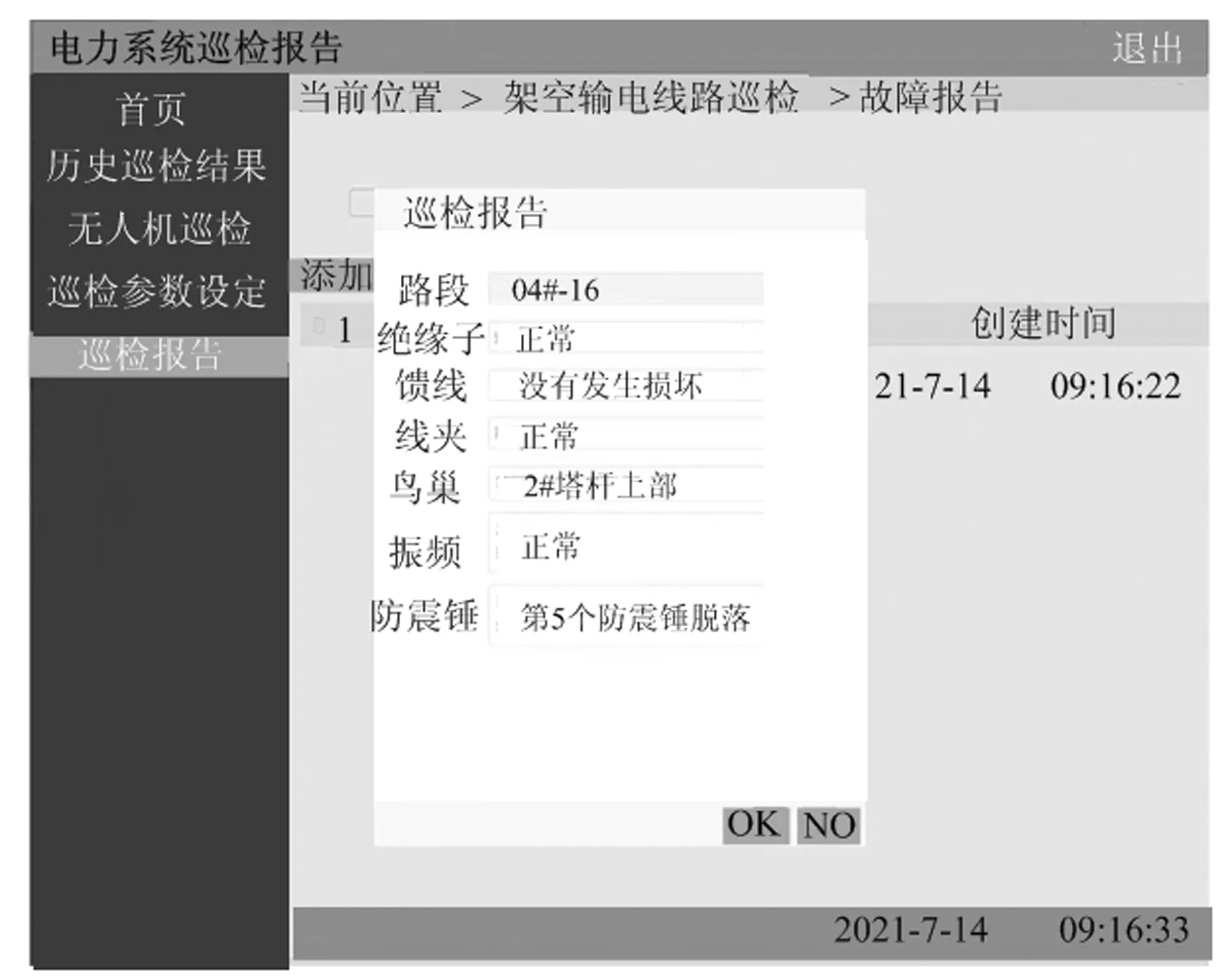
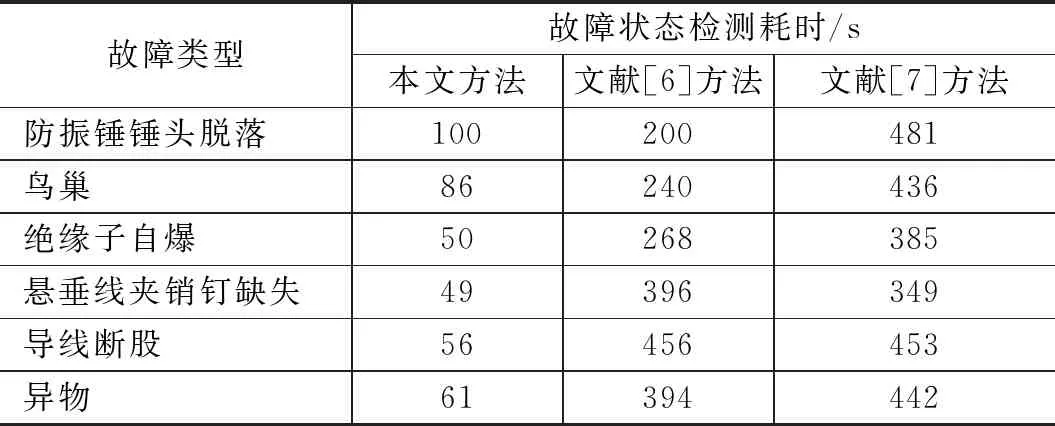
4)设定的距离限值用D表示,将其和dmax结果进行对比,如果dmax 5)采用依次连接方式对A、B两个坐标以及超过D的坐标点实行处理,即完成冗余航迹点处理。 由于RGB图像是由三个分量组成的,直接进行架空输电线路图像RGB图像的处理,不仅会增加计算的时间开销,还会因为数据量的庞大导致后续计算困难。通过多旋翼完成架空输电线路图像数据的采集后,为了减少图像所占的空间并强化状态检测结果的可靠性,因此对架空输电线路图像进行灰度化预处理。 图像灰度化处理是在RGB颜色空间内进行姜维胡处理,将原始的架空输电线路转化为灰度图像。此次进行灰度化预处理采用的方法为图像加权平均法,该方法可以通过对各项指标重要性进行衡量,从而为不同的色彩分配权,架空输电线路图像经过加权处理后,会更符合人眼观察的需求。 架空输电线路图像灰度化处理的计算公式为: Gray(i,j)=ω1·g(i,j)+ω2·r(i,j)+ω3·b(i,j) (7) 式中,(i,j)表示像素点,ω1、ω2、ω3分别表示R,G,B色彩分量的权重。 经过灰度化预处理后,架空输电线路的灰度级为0~255,架空输电线路的原始图像与灰度化处理后的图像如图5所示。 图5 架空输电线路图像灰度处理效果 从图5中可以看出,经过灰度化处理后,架空输电线路中其他信息仍然得到了较好的保留,因此说明此次灰度化预处理能够在保留架空输电线有效信息的同时,缩短了图像的处理时间与图像的存储开销,有助于提高架空输电线路状态检测的可靠性。 以上述完成灰度化预处理的架空输电线路图像为基础,为了提高状态检测精度,提取架空输电线路状态特征。此次特征提取采用的方法为卷积神经网络方法。 随着人工智能技术的发展,卷积神经网络为架空输电线路的状态检测提供了一种有效的手段。针对架空输电线路图像的特征提取,卷积神经网络采用梯度下降算法对迭代参数进行训练,不仅可以完成状态特征的提取,并且可以根据状态特征实现状态的分类提取。将完成灰度化预处理的架空并输电线路图像输入到卷积神经网络中进行训练,生成图像特征提取模型。卷积神经网络由输入层、卷积层、池化层以及全连接层、输出层组成。卷积神经网络的结构如图6所示。 图6 卷积神经网络的基本结构 在如图6所示的卷积神经网络结构中,输入灰度化处理后的架空输电线路图像Gray(i,j),并且用Xi,j表示卷积神经网络的特征图,Xi,j的计算公式可以表示为: Xi,j=f(Xi-1,j-1⊗wij+bij) (8) 式中,f(.)表示非线性激励函数,wij表示卷积核的权值,⊗表述卷积运算操作,bij表示偏移量。 完成特征图的计算后,需要依据采样规则进行向下采样操作,特征图向下采样的计算公式为: Xi,j=subsampling(Xi-1,j-1) (9) 通过多个卷积层的向下操作,可以通过卷积神经网络的全连接层进行特征表达。设定全连接层的输入概率分布为lij,原始特征图经过多次降维与变化处理后,可以构建特征表达模型: Y(ij)=P(L=lij|Xi,j:(wi,j,bi,j)) (10) 在卷积神经网络迭代训练的过程中,此次研究采用的方法为梯度下降算法,训练的残差通过梯度下降算法进行反向传播,逐层对卷积神经网络中的训练参数进行更新。卷积神经网络训练参数wij的更新公式为: (11) 式中,η表示学习速率。 卷积神经网络训练参数bij的更新计算公式为: (12) 将式(11)与式(12)的更新结果代入到式(8)中即可获得架空输电线路的状态特征。 架空输电线路图像的状态特征提取是以卷积神经网络框架为基础实现的,对灰度化预处理后的架空输电线路图像进行多次迭代训练,并经过参数的更新计算,输出最终的特征提取结果。 完成架空输电线路状态特征的提取后,根据提取的状态特征进行架空输电线路状态的检测。 完成架空输电线路状态特征提取后,进行架空输电线路状态检测,获得架空输电线路的故障位置。通过无人机上搭载的线路信号勘测装置和图像采集装置,采集架空线路的运行电流信号以及图像,并将采集结果传送至线路状态检测分析模块。检测分析模块则依据采集的数据和信号结果完成架空输电线路故障定位。本文以图像特征为例,进行架空输电线路故障定位,达到架空输电线路状态检测目的。 在故障定位过程中,线路状态检测分析模块接收多旋翼无人机采集的图像并完成特征提取后,对该特征进行分析,确定信号中的突变点,同时获取该突变点对应的模极大值,并通过小波变换算法确定故障线路。 模极大值的定义为:在一定的定义域内,原始特征信号u满足式(13): |Wsf(u)|≤|Wsf(u0)| (13) 式中,f(u)表示对数函数,Wsf(u)表示f(u)的变换系数;Wsf(u0)则表示f(u)小波变换后的模极大值。 选择Db5作为小波变换的母函数,同时设定其尺度为4,原始信号u经过小波分解后,可获取其高频细节部分,对该部分进行重构处理后完成小波变换函数的构建。依据构建的函数进行Wsf(u0)的小波变换处理,以此得出x突变点对应的模极大值结果,其公式为: η=lg(K+αS) (14) 式中,K表示小波变换的频率,α表示原始特征信号u的突变频率,S表示u的突变方向。 (15) 进行输电线路状态检测时,为判断线路是否发生故障,分析上述3个平方差值结果,三者之间是否满足式(16): (16) 如果满足式(16),表示架空输电母线发生故障;如果不满足,平方差值最大结果对应的线路即为存在故障线路。基于此,即完成架空输电线路故障确定,实现架空输电线路检测,并生成检测报告。 由于人工巡检的方式已经无法满足高压架空输电线状态巡检的要求,因此宁夏超高压电力工程有限公司引入了无人机巡检技术。无人机巡检可以提高作业效率的情况,实时采集架空输电线路的多种缺陷与状态信息。该公司负责区域的架空输电线路故障与缺陷主要有防振锤锤头脱落、鸟巢、绝缘子自爆以及悬垂线夹销钉缺失、导线断股以及异物等。 因此,上述架空输电线路可以满足此次实验的要求。以该架空输电线路为测试对象,分别采用本文方法、文献[6]提出的改进CenterNet的方法、文献[7]提出的基于形态学和SVM的方法进行对比,以充分验证本文方法的检测性能。 在此次实验测试过程中,采用六旋翼无人机进行检测,该无人机的相关参数见表1。 表1 六旋翼无人机相关参数 完成上述参数设计后,需要对多旋翼无人机的拍摄内容进行规定,并设计三次全线巡检,第一次进行全线巡检,是对架空输电线的整体情况进行扫描拍摄,第二次同样进行全线巡检,并将第二次的巡检数据与第一次进行对比,判断是否有新增的树木或者房屋等,第三次巡检则是针对耳边次巡检的结果进行检测性巡检,训练过程可以根据情况决定是否进行全线巡检。 架空输电线巡检内容如表2所示。 表2 架空输电线巡检内容 根据表2所示的巡检内容,针对架空输电线路运行状态检测的需要,采集架空输电线路塔身、塔头、塔基、绝缘子串、导线、地线等,不同项目所采集的图像数据如表3所示。 表3 图像数据 无人机飞行航线的控制直接影响架空输电线路状态检测的有效性,为验证本文方法对无人机航线的控制效果,获取航迹控制前后,无人机的航行轨迹结果如图7所示。 图7 无人机的航行轨迹结果 观察图7所示的无人机航行轨迹结果可以看出:采用本文方法控制前,无人机也可按照设定的巡检航线进行架空线路检测,但是在检测过程中,会发生航迹偏离现象。本文方法控制后,无人机的检测航迹与设定航迹更加吻合。因此,本文方法的应用性能良好,应用后能够对无人机的航线实行精准控制,有助于提高架空输电线路状态检测的精度。 为进一步验证本文方法的控制效果,获取不同检测距离、不同检测点数量下无人机飞行定位的结果,飞行定位结果见表4(要求定位误差结果低于2.5 cm)。 表4 无人机飞行定位的结果 cm 由表4结果可知:随着检测距离的逐渐增加,在不同的检测点数量下,本文方法控制后,无人机的定位误差结果均在2.5 cm以内,其中,最大误差结果为1.2 cm,最小误差结果为0.46 cm。因此,本文方法能够精准控制无人机的飞行状态,使其精准按照检测航线完成架空线路检测。 为验证本文方法对于冗余航迹点的处理效果,获取航迹点的处理效果,见图8。 图8 冗余航迹点的处理效果 由图8结果可知:本文方法应用后,可在不改变无人机检测方向、不改变多旋翼无人机整体的航迹形态特征,且保留航迹关键点的情况下,对航线过程中的冗余航迹点实行处理,删除其中冗余的航迹点,以此,保证检测效果的同时,提升无人机的检测效率。 为验证本文方法的应用性,获取本文方法检测后,对于检测结果生成的检测报告,见图9。 图9 架空输电线路检测报告生成结果 由图9结果可知:本文方法应用后,能够按照无人机的检测结果生成架空输电线路的检测报告,呈现架空线路各个部位的运行状态结果,为架空线路的管理提供相应的依据。因此,本文方法的应用性良好,满足架空输电线路状态检测需求。 为了进一步对本文方法输电线路状态检测性能进行验证,以架空输电线路的故障状态检测精度为指标,对三种方法的检测性能进行验证。故障状态检测精度结果如表5所示。 表5 不同方法的故障状态检测精度 从表5所示的故障状态检测精度对比结果中可以看出,相较于两种文献对比方法,本文方法能够对架空输电线的多种故障进行较为精准的检测。当发生绝缘子自爆故障时,本文方法的检测精度为94.7%,而文献[6]与文献[7]方法的检测精度分别为66.4%与56.3%。上述数据结果表明,本文方法能够提高输电线故障状态检测的准确性。 当架空输电线路出现故障后,如果不能及时的对故障类型与故障位置进行判断,则会严重降低输电线路的安全性,并且最大限度地缩短停电时间。因此,有必要对本文方法的故障状态检测耗时进行验证。三种方法的故障状态检测耗时对比结果如表6所示。 表6 不同方法的故障状态检测耗时 观察表6可知,在相同的故障类型下,本文方法能够缩短多项故障的检测耗时。同样分析绝缘子自爆故障下的检测耗时,本文方法的检测耗时为50 s,文献[6]方法的检测耗时为268 s,文献[7]方法的检测耗时为385 s。因此说明本文方法能够对架空输电线路故障进行快速的检测,对于提高架空输电线路的安全、稳定运行可以提供有效的技术支持。 电力系统中的架空输电线路,在通常情况下其架设环境相对较为复杂,导致人工检测难度加大,因此,提出采用多旋翼无人机进行线路状态检测。通过分析检测架构、规划航线流程、巡检航线控制、架空输电线路图像预处理、状态特征提取等步骤,完成架空输电线路状态的检测。结果显示:本文所提方法具有良好的应用效果,能够精准控制无人机的飞行航迹,定位误差较小,同时,在检测过程中,能够有效删除冗余航迹点,保证无人机的检测效率;并且,具有良好的应用性,能够完成线路故障诊断。2.4 架空输电线路图像预处理

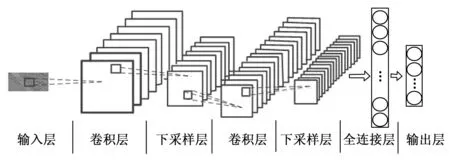
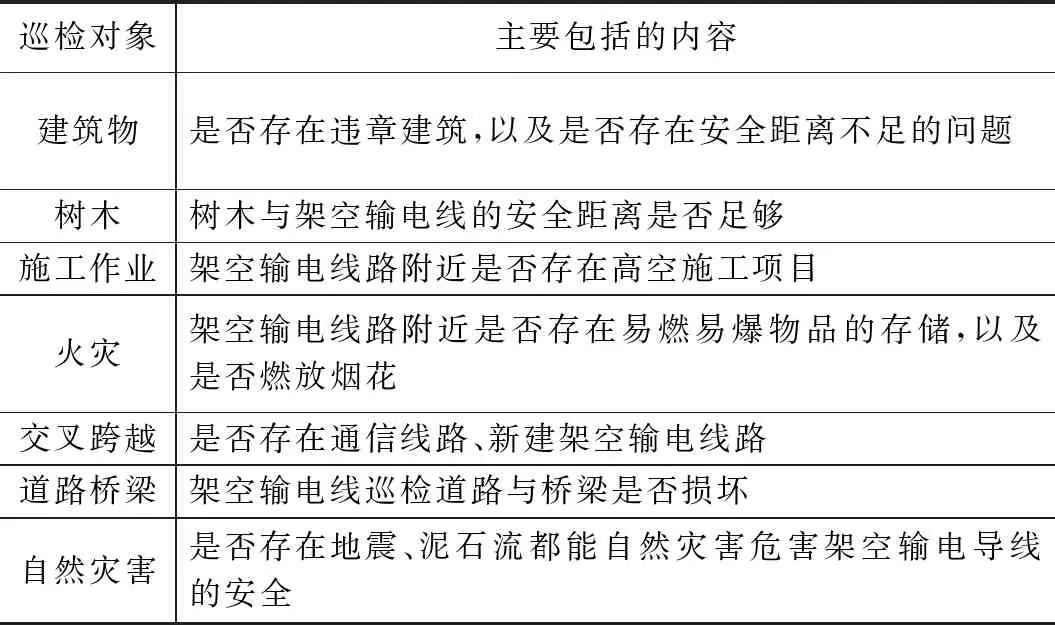
2.5 状态特征提取
2.6 架空输电线路状态检测

3 实验结果与分析






4 结束语
