基于北斗通信技术的无人机运动轨迹跟踪控制系统设计
2022-12-26黄琴
黄 琴
(四川科技职业学院 互联网学院,四川 眉山 620500)
0 引言
北斗通信系统是由空间段、地面段、用户段三部分共同组成的卫星导航系统,可在全球范围内为各类接入用户提供全天候的定位与导航服务,且具备较强的短报文通信与传输能力,可将数据信息文件的精度细化至微米级别。在实际应用过程中,北斗通信系统对于短报文数据的测速精度可以达到0.2米/秒,而对于协议文本的授时精度则能够超过10米/秒。北斗星基作为北斗通信系统的应用基础,能够借助卫星导航转发器对传输文件信息进行处理,并可以借助电离层设备、星历主板等元件结构,完成对报文信息参量的修正与转换[1-2]。在此过程中,由于核心通信设备的存在,短报文数据之间的连接关系能够得到较好保证,一方面促进了北斗星基中的数据信息转存速率,另一方面也避免了空间通信主机对于短报文传输数据的抑制性影响。与有人驾驶的飞机相比,无人机飞行器的适用性更强,能够适应各种不同的任务环境,且由于其主体结构的物理重量水平相对较低,在完成飞行运动时,可将航拍摄像头等设备直接放置在机体表面[3]。在实际应用过程中,无人机飞行器运动轨迹的起伏形式较为明显,因此对于核心控制主机来说,其在俯仰角、滚转角、偏航角层面所获得的轨迹跟踪结果始终难以与飞行器设备的实际运动轨迹保持一致。
针对上述背景,国内外已有相关领域学者对无人机运动轨迹跟踪控制做出了研究。文献[4]提出基于最优迭代学习控制的四旋翼无人机轨迹跟踪控制方法。针对四旋翼无人飞行器存在的外部干扰,建立了离散的扰动模型,利用Lya-Punov法证明了其收敛性,并对干扰进行补偿,采用最优化的迭代式学习控制器,以确保四旋翼无人飞行器的期望航迹跟踪误差逐渐收敛,实现无人机运动轨迹跟踪控制。该方法的控制耗时较长。文献[5]提出基于增量非线性动态反演和微分平度的四轴飞行器轨迹跟踪控制技术。提出了一种新的控制律,用于跟踪位置和偏航角及其高达四阶的导数。根据四轴飞行器动力学的差分平坦度,使用角速率和角加速度的前馈输入来跟踪加速度。快速跟踪需要直接控制车身扭矩,通过光学编码器的测量值的闭环电机速度控制来实现机身扭矩控制。该控制器利用增量非线性动态反演来跟踪线性和角加速度,但该方法存在外部干扰,例如空气动力阻力,影响无人机运动轨迹跟踪控制的准确性。
为避免上述情况的发生,基于自适应积分反步法的应用系统利用PD控制器记录无人机飞行器所处的实时运动位置,再根据自适应法则,确定轨迹节点之间的关联性关系,从而将各个跟踪节点有序串联起来[4]。然而此系统的应用能力有限,并不能实现对整条无人机行进轨迹的准确追踪与控制。为解决此问题,引入北斗通信技术并以此为基础,设计一种新型的无人机运动轨迹跟踪控制系统。
1 基于北斗通信技术的协议格式定义
无人机运动轨迹跟踪控制系统的协议报文包含运维报文、通知协商报文、业务数据报文3种基本表现类型,本章节将在北斗通信技术的支持下,针对各类的协议报文的应用格式进行定义。
1.1 运维报文
在无人机运动轨迹跟踪控制系统中,运维报文决定了通信数据的传输能力,在已知信息报文传输起始位置与传输终止位置的前提下,运维报文中所包含的数据信息参量越多,通信数据所具备的实时传输能力也就越强[5-6]。
1)传输起始位置:信息报文的传输起始位置决定了运维报文数据参量的最小定义条件,在北斗通信技术的作用下,每一条无人机运动轨迹的初始节点都可被认定为是运维报文的传输起始位置,通常定义为d0。
2)传输终止位置:信息报文的传输终止位置决定了运维报文数据参量的最大定义条件,在北斗通信技术的作用下,每一条无人机运动轨迹的目标节点都可被认定为是运维报文的传输终止位置,通常定义为dδ,其中δ表示独立无人机运动轨迹中的行进节点分布数量。
设β表示北斗通信节点的分布精度系数,ΔA整个无人机运动轨迹网络中的北斗通信节点个数均值。联立上述物理量,可将基于北斗通信技术的运维报文格式表达式定义为:
(1)
规定在系数δ取值等于自然数“1”的情况下,信息报文传输起始位置与传输终止位置完全相同,即整条无人机运动轨迹中只包含一个北斗通信节点。
1.2 通知协商报文
通知协商报文用于控制系统主站与无人机运动终端间的协商身份认定。与运维报文相比,该类型报文对于北斗通信节点的整合能力更强,可在加密运算无人机运动轨迹数据的同时,将节点跟踪密钥反馈回核心控制主机中,并能够根据北斗通信节点的分布形式,确定无人机运动轨迹数据所处的实时传输位置[7]。表1反映了通知协商报文与运维报文协议格式的对比情况。

表1 报文协议格式
对北斗通信数据进行解密在北斗通信技术的影响下,通知协商报文可直接对控制系统已获取的无人机运动轨迹节点数据进行处理,且随着数据信息累积量的增大,报文加密模板与解密模板的编码形式都不会发生变化[8]。
1.3 业务数据报文
业务数据报文也叫无人机运动轨迹数据的传输协调报文。在图1所示的北斗通信环境中,由于相邻节点之间的物理间隔相对较小,所以业务数据报文在轨迹跟踪控制系统中不具备大量累计的能力。在实际应用过程中,轨迹跟踪控制主机与北斗短报文支持设备的存在数量始终相等,在北斗通信技术的作用下,无人机运动轨迹数据的传输行为始终具有单一性,已累计的数据信息只能被数据库主机完全存储,且整个存储过程中,数据信息参量的转码必须遵循业务数据报文[9-10]。

图1 北斗通信环境

(2)
对于无人机运动轨迹跟踪控制系统来说,北斗通信技术同时约束运维报文、通知协商报文、业务数据报文三类协议文件的格式定义标准,且随着通信数据累积量的增大,协议文件的转发量也会不断增大,但业务数据类报文的表现形式最为明显。
2 无人机飞行原理及系统建模
根据基于北斗通信技术的协议格式定义条件,分析无人机运动系统中的各级结构,再根据动力学模型,实现对无人机飞行原理的深入研究。
2.1 无人机系统结构
为了准确跟踪无人机运动轨迹,需要清楚无人机系统中各个部件的关系与实际作用能力[11-12]。无人机运动系统的机械结构如图2所示。
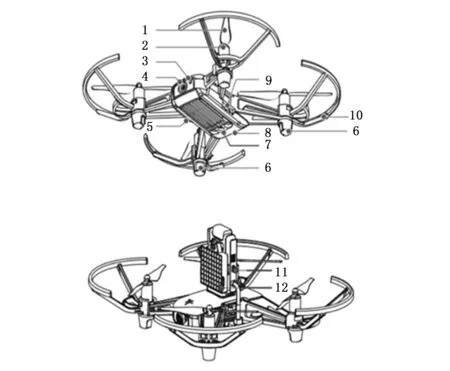
1.螺旋桨;2.电机;3.状态指示灯;4.相机;5.电源按键;6.天线;7.装载于跟踪定位芯片;8.飞行电池;9.Micro主机;10.桨叶保护罩;11.开源控制器;12.无人机运动拓展模块。
电机作为整个无人机运动系统中的电量输出装置,可以为螺旋桨提供大量的供应电流,从而使其呈现出快速转动的表现状态。当电源按键处于闭合状态时,状态指示灯持续亮起,此时相机会不断对无人机运动轨迹进行拍摄,并可借助北斗通信网络,将所得轨迹图像反馈回系统控制主机中。飞行电池负责存储不能被无人机飞行器完全消耗的传输电流,当电机装置的供应能力出现下降时,螺旋桨会自发调动飞行电池中的剩余电量,从而使得无人机飞行器的运动状态得以保障。天线装载于跟踪定位芯片外部,可感知北斗通信节点发出的感应信息,并将其反馈给Micro主机。桨叶保护罩能够保护螺旋桨结构,并为其提供一定的支撑作用。
开源控制器决定了无人机运动拓展模块与系统控制主机之间的数据通信关系,在实际应用过程中,该结构的连接行为受到北斗通信节点排列方式的直接影响。
2.2 动力学模型

(3)

3 系统主控结构
按照无人机飞行原理及标准的运动学建模条件,设置主供应电路、全驱动运动结构、姿态调节器、自适应控制器等多个硬件应用设备,从而完成基于北斗通信技术的无人机运动轨迹跟踪控制系统的设计。基于北斗通信技术的无人机运动轨迹跟踪控制系统整体结构如图3所示。
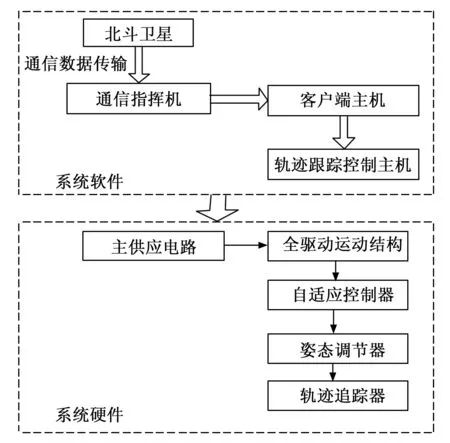
图3 人机运动轨迹跟踪控制系统整体结构
根据图3可知,基于北斗通信技术的无人机运动轨迹跟踪控制系统软件是通过北斗通信系统提升通信数据的实时传输能力,结合大量行进姿态数据,完成对无人机运动轨迹跟踪控制系统的动力学建模。硬件由主供应电路、全驱动运动结构、姿态调节器、自适应控制器及轨迹追踪器构成。以下对硬件结构进行详细介绍。
3.1 主供应电路
主供应电路管控无人机运动轨迹跟踪控制系统中的电量传输行为,以THB6128主板作为核心搭建元件,可在反相器结构的作用下,调试电量控制器两端的电压负载数值,从而使得主控时钟中的直流电子始终保持相对稳定的传输状态[15]。整个主供应电路包含4个阻值均不相同的连接电阻设备,其中R1电阻的阻值水平最高,能够占据大量的电压信号,从而保证无人机飞行器的运动能力。R2电阻、R3电阻同时调节THB6128主板中的电流输出行为,由于二者连接阻值水平不同,所以其表现出来的行为水平也有所不同[16]。具体的主供应电路连接结构如图4所示。
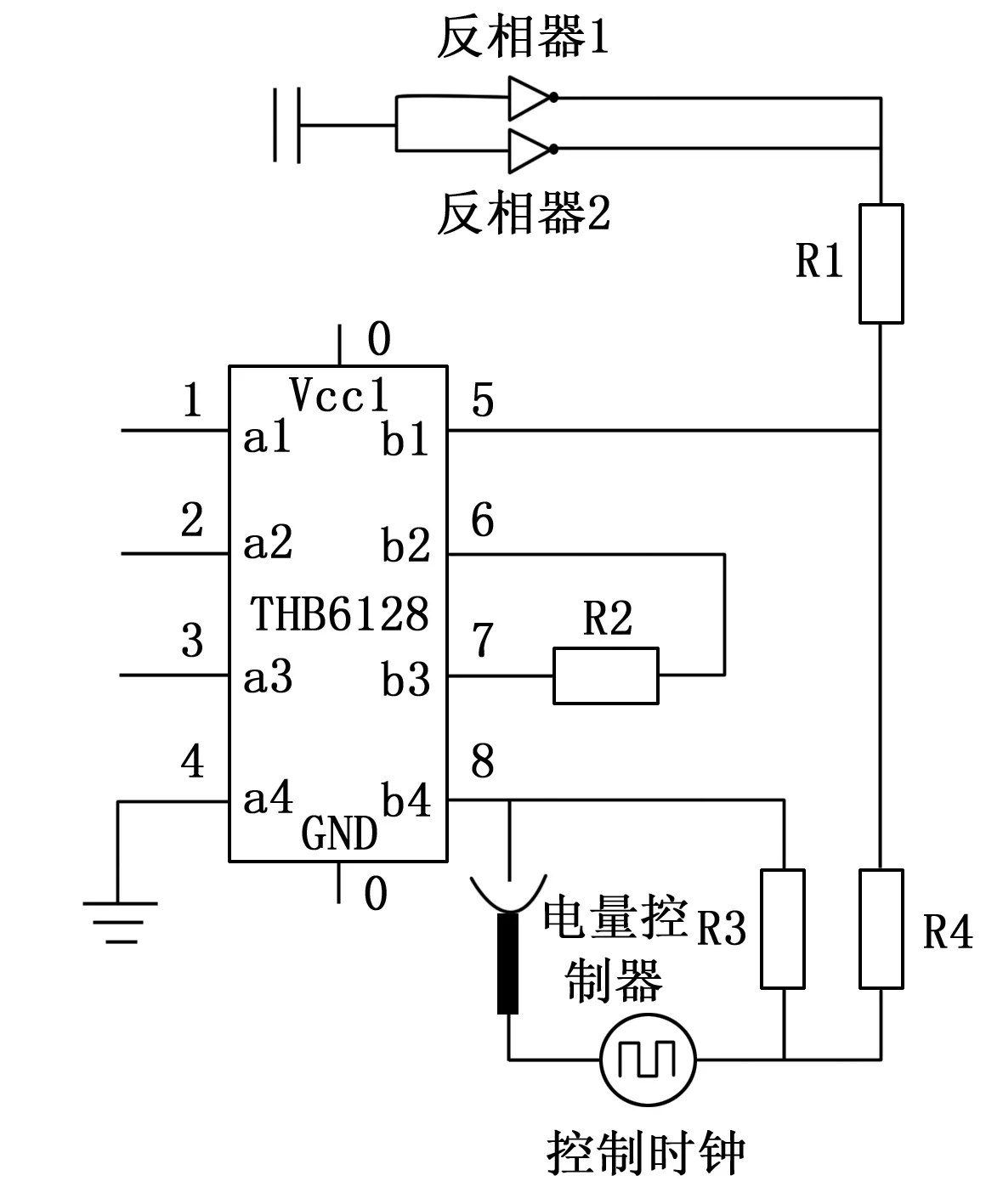
图4 主供应电路的连接结构
电量控制器与核心控制时钟保持稳定的连接状态,在R4电阻的作用下,控制时钟内积聚的电量信号越多,THB6128主板对于电量信号的输出能力也就越强,此时无人机飞行器的运动速度也就相对较快。
3.2 全驱动运动结构
作为无人机运动轨迹跟踪控制系统中的动力信号管控装置,全驱动运动结构可以在调节无人机飞行器行进轨迹的同时,根据已路过节点的排列形式,推测整条运动轨迹的分布状态,并将这些信息文件反馈给核心控制主机,以便于其制定系统后续执行所需的无人机运动轨迹跟踪指令[17-18]。
在全驱动控制面板中,SGF65C芯片、LANC2芯片同属于主控器驱动结构,负责对无人机飞行器的运动状态进行实时调试;PG863J芯片则主要负责调节系统控制主机与无人机运动轨迹节点之间的跟踪匹配关系;RL611旋钮、Pr4-7设备总是保持并联连接关系,并可以根据无人机飞行器的实时运动速度,确定关联轨迹节点的具体分布状态。
3.3 姿态调节器
姿态调节器负载于无人机运动轨迹跟踪控制系统的子运行单元之中,负责记录无人机飞行器所表现出来的运动行为,并可以借助核心控制主机,分析整条运动轨迹中的通信节点分布形式[19]。在实际应用过程中,姿态调节器元件与核心控制主机之间的数据传输关系建立,必须满足北斗通信技术的作用原则。在无人机运动轨迹跟踪控制系统中,姿态调节器结构的连接行为始终受到主供应电路元件的调节,一般来说,前者所记录的无人机通信节点数量越多,控制主机在单位时间内所能完整排查的运动轨迹数量也就越多,此时系统控制主机所制定的运动轨迹跟踪指令也就越符合实际应用需求[20]。
3.4 自适应控制器
自适应控制器以PID控制芯片作为核心应用结构,能够在录入无人机运动速度、轨迹节点坐标、通信数据参量等多项物理系数的同时,制定待执行的指令文件,并可以在输入信道组织的作用下,将这些数据信息参量直接存储于系统数据库主机之中[21-22]。在图5中,主供应电路输出PID控制芯片所需的电量信号,Boost变换器输出经过多次变换的稳流通信波信号,这些信号参量在控制芯片中进行融合与汇总,并生成大量的输出文件,以供北斗通信主机的调取与利用。
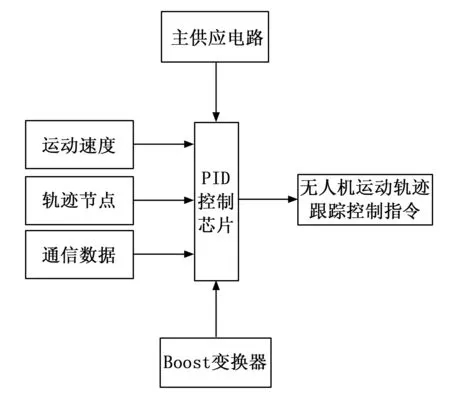
图5 自适应控制器元件的连接原理
为使无人机运动轨迹得到准确的跟踪与控制,运动速度、行进节点等数值指标的选取,都必须满足北斗通信技术的实际应用需求。
3.5 轨迹追踪器
轨迹追踪器负责记录无人机飞行器的运动行为,并可在自适应控制器元件等多个硬件结构的作用下,完成对相关通信节点的重排处理[23-24]。在北斗通信技术的作用下,轨迹追踪器结构中的所有已记录信息都可以被系统控制主机直接抓取,这也是相关航迹节点数据能够得到准确记录的主要原因[25-26]。联合各级软、硬件执行条件,实现基于北斗通信技术的无人机运动轨迹跟踪控制系统的顺利应用。
4 实验结果与分析
俯仰角、滚转角、偏航角是3种不同的无人机运动轨迹航迹观测角。在实际应用过程中,若控制主机所获得的俯仰角、滚转角、偏航角跟踪结果均能与无人机实际运动轨迹保持一致,则判定控制主机能够对整条行进轨迹进行准确追踪与控制;若任何一个航迹观测角的跟踪结果与无人机实际运动轨迹产生较大出入,都判定控制主机不能对整条行进轨迹进行准确地追踪与控制。
本次实验的具体流程如下:
步骤一:选取如图6(a)所示的行进路径作为无人机运动轨迹;
步骤二:对实验用无人机飞行器进行调试,如图6(b)所示;

图6 实验环境设置
步骤三:令实验用无人机飞行器在所选取轨迹路径内运动;
步骤四:利用基于北斗通信技术的无人机运动轨迹跟踪控制系统对中控主机进行干预,将所得到的俯仰角、滚转角、偏航角跟踪结果,作为实验组变量;
步骤五:利用基于自适应积分反步法的应用系统对中控主机进行干预,将所得到的俯仰角、滚转角、偏航角跟踪结果,作为对照组变量;
图7反映了中控主机所获得的俯仰角、滚转角、偏航角跟踪结果实验值,与无人机实际运动轨迹的对比情况。
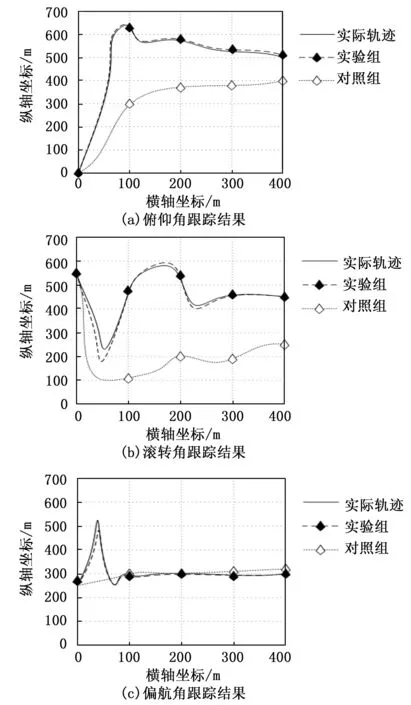
图7 轨迹对比
1)俯仰角跟踪结果分析:俯仰角跟踪结果的起始坐标为(0,0),整个实验过程中,实验组无人机运动轨迹始终与无人机实际运动轨迹极为贴合;对照组无人机运动轨迹的横、纵坐标则一直呈现不断增大的变化趋势,其整体变化规律不符合无人机实际运动轨迹,且两种运动轨迹具有明显出入;
2)滚转角跟踪结果分析:滚转角跟踪结果的起始坐标为(0,554 m),整个实验过程中,实验组无人机运动轨迹依然与无人机实际运动轨迹极为贴合;对照组无人机运动轨迹的横、纵坐标则呈现出不断波动的变化趋势,其整体变化规律不符合无人机实际运动轨迹,且两种运动轨迹依然具有明显出入;
3)偏航角跟踪结果分析:偏航角跟踪结果的起始坐标为(0,263 m),整个实验过程中,实验组无人机运动轨迹还是能够与无人机实际运动轨迹保持良好的贴合状态;当横坐标数值处于100~300 m之间时,对照组无人机实际运动轨迹能够与实际运动轨迹较好贴合,但从全局角度来看,其整体贴合程度依然不及实验组。
综上可知,在基于北斗通信技术的无人机运动轨迹跟踪控制系统的作用下,俯仰角跟踪结果、滚转角跟踪结果、偏航角跟踪结果均能与无人机飞行器的实际运动轨迹保持良好的贴合状态,在实际应用方面,能够对整条行进轨迹进行准确的追踪与控制,与基于自适应积分反步法的应用系统相比,更符合实际应用需求。
5 结束语
在基于自适应积分反步法的应用系统的基础上,新型无人机运动轨迹跟踪控制系统利用北斗通信技术,对运维报文、通知协商报文等多种协议文件的连接形式进行了重新定义,又根据无人机系统的结构示意图,建立完整的动力学模型条件。在北斗通信技术的作用下,主供应电路可以输出大量的传输电量信号,以供全驱动运动结构、姿态调节器、自适应控制器、轨迹追踪器等下级硬件附属设备的调取与利用。随着无人机飞行器运动时间的不断延长,电量输出信号可以在系统数据库主机中大量累计,不但满足了跟踪设备实时管控飞行器运动轨迹节点的实际应用需求,也避免了差额供电行为的出现,使得相关执行设备之间的供求连接关系不断趋于完善。实验结果显示,在这种新型控制系统的作用下,控制主机在俯仰角、滚转角、偏航角方向上所获得的跟踪结果均能与无人机飞行器的实际运动轨迹保持一致,在促进主机元件对整条行进轨迹进行准确追踪与控制方面,确实具有较强的实用可行性。
