自动驾驶技术发展现状与发展分析
2022-12-25尹雪权
尹雪权
[科学城(广州)信息科技集团有限公司,广东 广州 510670]
0 引言
为确保社会出行环境的安全及有序,世界上许多国家都开始了自动驾驶技术研究,未来用无人驾驶车替代辅助驾驶操作系统。当前自动驾驶技术已经取得了一定的研究成果,并且初步投入使用。但其仍旧有一些问题还未解决,大范围推广仍有一定的难度。基于此有必要对自动驾驶技术的发展现状与未来发展进行分析,以梳理自动驾驶技术的发展情况,明确自动驾驶技术的发展空间与发展前景。
1 自动驾驶技术简介
自动驾驶技术是应用于车辆的自动化控制技术[1]。因此自动化驾驶技术的研究与发展需要多个技术的支撑。其中主要有环境感知技术、高精度定位技术、场景认知技术、协同决策技术以及人机共驾技术等。这些技术是自动驾驶技术的组成部分,也是自动驾驶技术的动力支撑。同时自动驾驶技术的完善与不断发展也仰赖于这些技术的发展与提升。
关于自动驾驶技术有两种等级划分标准:①美国汽车工程师学会提出的等级划分标准。②我国清华大学提出来的等级划分标准。美国汽车工程师学会将自动驾驶技术分为了六个层次,分别是零级的手动、一级的驾驶辅助、二级的部分自动、三级的有限制自动化、四级的高度自动以及五级的完全自动。我国清华大学将自动驾驶技术按照“人”“马”“骑士与马”分为了三个层次,如图1 所示,分别是与“人”相对应的离线驾驶辅助,与“马”相对应的局部自动驾驶以及与“骑士与马”相对应的自主驾驶(无人驾驶)、人机协同。总体而言,自动驾驶技术给汽车行业带来了新的变革,促使汽车行业迈入了新的发展趋势。
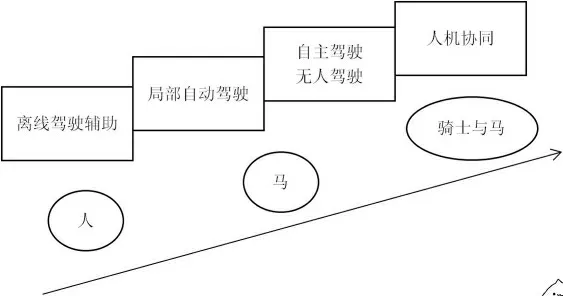
图1 清华大学出具的自动驾驶技术分级标准
2 自动驾驶技术发展现状
基于自动驾驶技术在道路交通方面的应用优势,自动驾驶技术已经得到了较为广泛的研究与发展[2]。同时自动驾驶技术是由多种技术构成的,本文对自动驾驶技术的各支撑技术进行发展现状分析,以期通过各支撑技术的发展现状获悉自动驾驶技术的发展现状。
2.1 自动驾驶技术中环境感知技术
环境感知技术即对道路环境进行精确感知,从而规划出合理和安全的出行路线,如图2 所示。因此环境感知技术是自动驾驶技术的有力支撑。环境感知技术多用于车载环境感知传感器,常见的有视觉类传感器与车载雷达传感器等。交叉路口、坡道等道路环境常会存在一定的视觉盲区,进而产生驾驶安全威胁。以往的雷达与视觉方案并不能冲破传感器自身的限制,难以提供安全及准确的出行路线。环境感知技术当前的感知能力与识别精度也尚未达到理想程度,进而难以推进自动驾驶技术的飞速发展。基于此,我国正在研究精知技术,如深度学习技术、车路协同感知技术等。

图2 环境感知技术
以广东省为例,广东省极为重视自动驾驶技术的研究与发展。广东已将自动驾驶技术应用在了无人小巴与无人出租车上,从而展示了自动驾驶技术在有限空间内的应用优势。同时基于自动驾驶技术的局限性,广东也建立了相应的“自动驾驶与智慧交通示范区”,助力自动驾驶技术的进一步研究与升级。为进一步实现车路协同感知技术的发展创新,广东省还组织举办了立足于华南地区的自动驾驶技术交流会。
2.2 自动驾驶技术中高精度定位技术
高精度定位技术能够为自动驾驶车辆提供精确的路径规划,从而提高出行效率[3]。高精度定位技术还能够根据定位结果自动进行避障规划,从而确保出行安全。因此高精度定位技术也是自动驾驶技术不可缺少的助力之一,此技术保障着自动驾驶技术的出行效率与出行安全。当前发展情况下高精度定位技术的研究与发展仍旧面临着不小的挑战。首先,高精度定位技术仍旧存在着不小的覆盖盲区,进而使得高精度定位技术的覆盖范围大打折扣,影响了高精度定位技术的进一步发展及应用。其次,高精度定位技术的开发和应用成本较为高昂。高昂的成本使得高精度定位技术适用性不足。
但高精度定位技术又是自动驾驶技术必不可少的组成部分。因此我国各主流地图软件正在积极进行自动驾驶的高精度地图建设。广东省内拥有众多科技产业,进而为高精度定位技术的研发打下了坚实的技术基础。同时北斗地基增强系统也逐步投入使用,以北斗地基增强系统为基础的多源辅助定位技术以及高精度定位技术将会得到进一步的提升,其成本显著降低及覆盖盲区显著减少。
2.3 自动驾驶技术中控制与执行技术
控制与执行技术是实现汽车自动驾驶的前提条件[4]。因此控制与执行技术也是自动驾驶技术的重要组成部分之一,如图3 所示,其关系着自动驾驶技术的应用与发展。控制与执行技术主要应用于自动驾驶汽车的控制系统,负责自动驾驶车辆的制动、油门以及转向等。控制与执行技术最主要的应用作用为确保自动驾驶车辆的行动轨迹与决策层的规划轨迹相符。当前发展情况下控制与执行技术已经得到了一定的发展,在自动驾驶车辆中有所应用。但控制与执行技术仍旧面临着较大的发展挑战。控制与执行技术在面对复杂路况和非常态道路环境时还尚未能做出及时正确的反馈,因此其灵敏性有待加强。

图3 控制与执行技术
自动驾驶技术仍有较大的发展与改进空间,尚未具备大规模投入使用的条件。为冲破控制与执行技术的限制,广东省建立了专门的自动驾驶试验基地,以测试控制与执行技术在不同路况与道路环境下的灵敏度。综合以上几点来看,广东省极为重视自动驾驶技术的研究与发展,在自动驾驶技术上投入了较多的资金、技术与场地。并且广东省已经取得了较为明显的发展优势,广东科技厅举办的相关展示活动显示广东省已实现了自动驾驶技术在出租车、农业等应用场景的实际应用。
3 自动驾驶技术的发展分析
3.1 自动驾驶技术的发展趋势
自动驾驶技术推动了汽车行业的大变革,促进了信息通信技术与汽车产业的高度融合。总体而言自动驾驶技术促使汽车行业走向了新的发展态势。同时汽车行业的大变革也为自动驾驶技术提供了更为广阔的发展前景与发展空间,推动了自动驾驶技术的进一步发展。除此以外自动驾驶技术的研究与发展也是展现我国工业实力的重要媒介。自动驾驶技术的研究与发展代表着我国国民经济的潜在增长,代表着我国工业制造领域和新兴技术的有效融合。
当前发展情况下,自动驾驶技术的发展空间呈现出日益增大的趋势。自动驾驶车辆的逐步投入使用也充分展现了自动驾驶技术的应用优势。自动驾驶车辆将在未来的汽车市场中占据越来越大的购买比例。自动驾驶技术目前还存在着一定的技术瓶颈。因此自动驾驶技术的应用场景还有所限制。但随着技术投入与资金投入的加大,自动驾驶技术的技术瓶颈势必会有所突破。自动驾驶技术的技术瓶颈被突破以后,自动驾驶车辆的应用场景将会得到进一步的扩展,甚至取代封闭路网地区,使得无人港口和无人货场成为发展主流[5]。
除此以外,自动驾驶的景区摆渡车也将会出现在大众面前,进而为景区的游客提供更新颖的观光体验。城市公共建设则会有一定的过渡时期,自动驾驶技术初步投入道路行驶后,将会出现自动驾驶公共汽车、出租车以及私家车混行的情况。如果试验情况良好的话,后期甚至有可能会出现自动驾驶车辆独占路权,非自动驾驶车辆不可上路行驶的情况。自动驾驶车辆展示如图4 所示。

图4 自动驾驶车辆展示
3.2 自动驾驶技术的发展困境
从自动驾驶技术的发展情况来看,自动驾驶技术有着较为突出的应用优势。并且自动驾驶技术的大范围应用也已经可以预见。但自动驾驶技术仍面临着较多的发展困境,延缓了自动驾驶技术的推进步伐。具体有以下3 点。
(1)自动驾驶技术发展面临着道德困境。“电车难题”本是用于反思功利主义。目前“电车难题”也可用来解释自动驾驶技术所面临的道德困境。“电车难题”假设的是在死亡事故无法避免的情况下,电车司机应做出怎样的选择,电车司机选择与否是否会违背道德。体现在自动驾驶技术上即由谁来作为道德主体。“电车难题”中电车司机是道德主体。同时电车司机也是承担主体,其选择所带来的后果由电车司机来承担。但自动驾驶车辆所造成的安全事故却无法准确衡量道德主体。自动驾驶技术只是一种技术,而人并没有参与驾驶活动[6]。
(2)自动驾驶技术发展面临着法律解释困境。法律解释困境与道德困境有着相通之处,即法律层面也无法判定责任主体。责任主体在法律层面的模糊不清将会使得自动驾驶技术存在较大的漏洞,进而影响自动驾驶技术的推广使用。
(3)自动驾驶技术发展面临着技术采集与技术解释的双重困境。自动驾驶技术的正常应用是以采集人类信息为基础的。自动驾驶技术要对人类行为、图像识别以及驾驶技能进行充分的学习与计算。基于自动驾驶技术对人类信息的全面了解,自动驾驶技术能够确保封闭领域运输的精准性与安全性。但也仅限于封闭领域,开放领域的复杂性使得自动驾驶技术很难确保运输安全与运输的准确性。
4 结语
综上所述,自动驾驶技术有着极为广阔的发展前景与发展空间。自动驾驶技术能够有效确保交通安全,降低交通安全事故的发生率,对道路安全有着较为突出的意义。基于此本文从自动驾驶技术简介、自动驾驶技术发展现状、自动驾驶技术的发展分析这三个角度出发,分析了自动驾驶技术的发展现状与发展趋势,以期对自动驾驶技术有所帮助。
