一种高精度、高鲁棒的Buck变换器滑模控制研究
2022-12-25曾俊杰但远宏
徐 鹏,李 正,曾俊杰,但远宏
(1.重庆理工大学 电气与电子工程学院, 重庆 400054;2.重庆理工大学 计算机科学与工程学院, 重庆 400054)
0 引言
DC-DC变换器的控制策略是国内外学者的重要研究内容。其中PID[1-2]、模糊[3]、神经网络[4]、滑模变结构[5-9]等控制技术常被应用到DC-DC变换器的控制当中。Buck变换器作为DC-DC变换器的一种,在实际控制中存在着对变换器参数变化敏感的问题,在设计控制器时,需要考虑到系统的鲁棒性。20世纪50年代,滑模变结构[10]控制正式提出,其控制方式具有对系统内外部参数变化不敏感的特性,具备良好的鲁棒性,这一非线性控制策略非常契合Buck变换器的工作模式。文献[11]将滑模变结构控制策略运用在降压变换器中,实现了Buck变换器的滑模控制,但存在着不能在有界时间内收敛且抖振较大的问题。文献[12]与文献[13]提出了新型趋近律,使得降压变换器电压输出纹波明显减少。针对收敛时间不定,文献[14]采用全局终端滑模的控制方式,取得了良好的控制效果。文献[15]对整个滑模面附加修正滑动函数,有效解决了Buck变换器的收敛精度问题,但其设计复杂且输出电压存在明显抖振。
不同于文献[15],本文针对Buck变换器的鲁棒性和收敛精度,提出了一种基于修正滑动函数改进趋近律的控制方法,并设计了一种快速终端模糊滑模控制策略。首先定义了一种PD控制的滑模面函数,结合改进后的趋近律以及模糊控制对切换增益进行估计,设计了Buck变换器改进型快速终端模糊滑模控制器,并给出了相同控制思想的2种改进型控制器。基于李亚普洛夫稳定性理论,对所设计的改进型趋近律函数和控制器进行了稳定性证明,确保系统可以在有限时间内收敛。通过实验对比分析,基于PD型滑模面函数以及改进趋近律的滑模控制器均能实现电压的零静差输出,且削抖现象明显。其中,改进型快速终端模糊滑模控制的Buck变换器实现了电压的高精度输出,表现出良好的鲁棒性。
1 数学模型建立
直流降压变换器结构如图1所示,其中Vi为输入电压、Q为开关管、D为续流二极管、C为储能电容、L为储能电感、R为电阻负载,Vo为输出电压。

图1 Buck变换器结构
当开关管Q开通时,负载由直流电源Vi进行供电,在电感L中储存能量。当开关管关断时,电感L释放能量,通过控制开关管在1个周期中开通时间与关断时间的比例系数Du即可实现变换器的降压功能。
根据Buck在电感电流连续模式(continuous conduction mode,CCM)下的工作特性并结合状态空间平均法,可以得到直流降压变换器的状态空间方程为:

(1)
根据式(1),可以得到关于输出电压误差x1以及电压误差微分x2的状态空间方程,其中Vr为电压参考输出。设:

(2)
则关于输出电压误差的状态空间方程可表示为:

(3)
直流降压变换器具有快速性,但稳定性不足,需设计合适的控制器。
2 控制器设计及稳定性证明
2.1 滑动函数分析
直流降压变换器在传统滑模控制下存在抖振大、收敛精度差以及鲁棒性不足的问题。针对这一现象,提出采用滑动函数对趋近率进行优化,以提高变换器的收敛精度和鲁棒性。
定义PD控制的滑模面为:
(4)
其中Kp、Kd为比例及微分系数。
将式(4)进行拉普拉斯变换可得:
(5)
此时,将滑动函数设计为:

(6)
由拉普拉斯变换可得:
(7)
将式(5)与式(7)求解可以得到式(8):
(8)

(9)
由式(6)可知,该控制器的阶次比传统控制器高,控制效果更好,且当M(s)=0时,滑模函数S也将为0,保证了系统收敛。式(9)表示引入滑动函数后,控制器将具备积分器的效果,有利于输出静差的减少。

证明:

2S2(t0)exp(-2Ki(t-t0))
(10)
式(10)中,t0是时间的初始时刻,且Ki> 0。当滑动函数M为正值时,S2在任何时刻均减小。同理,当滑动函数M为负值时,S2在任何时刻均增加,此时满足:

(11)
据文献[15]可知,该滑动函数设计合理且稳定。
2.2 趋近率设计与分析
采用指数趋近率对控制器进行设计,一般指数趋近率设计见式(12),且ε> 0,K> 0。

(12)
对趋近率进行改造,使趋近率具有积分器的作用,可迫使系统收敛零并趋于稳定,设计形式为:

(13)

对改进趋近率稳定性证明,由李亚普洛夫稳定条件:

(14)
当S<0时,B<0,A>0;当S>0时,B>0,A<0。综上所述,V的导数小于0恒成立,该系统稳定。
2.3 基于滑动函数的滑模控制器设计
将指数趋近律进行滑动函数改造,并针对控制对象进行控制器的优化,共设计出3种滑模控制器。
2.3.1改进型滑模控制器设计及稳定性证明
在控制器设计中,选取e=Vr-Vo,则PD型滑模面函数可以设计为:
(15)
选取式(12)为趋近函数,将指数趋近率进行滑模函数改造可得:
(16)
控制器设计与传统不附加修正滑动函数的设计方式相同。因为滑动函数具有积分器的作用,故可使M收敛至0,从而使收敛至0,整个系统收敛。这样可使得控制器的设计难度大大降低,故控制量μ改进前与改进后分别为:
(17)

K·sgn(M(s))+εM(s)]
(18)
改进前控制量μ稳定性证明如下:
选择李亚普洛夫函数:

(19)
对等式求一阶导数得:

(20)
若系统稳定,那么必须使得:

(21)
结合式(3)与式(17)可得:
-k|s|-εs2<0
(22)
改进后控制量μ稳定性分析如下:
在滑模面函数S设计合理情况下,结合式(14)同理可得:

(23)
系统可以在一定时间内到达滑模面且收敛。
2.3.2改进型快速终端模糊滑模控制器设计
1) 模糊控制器设计
由式(17)可知,切换增益K是抖振造成的主要原因。在Buck变换器进入稳态时,切换增益K应减少,从而减少系统输出抖振;在负载突变时会造成一定的系统干扰,此时应使得切换增益K增大以提升其鲁棒性。模糊控制器针对滑模控制的趋近函数中切换增益K进行估计,实现降低抖振、提升鲁棒性的目的。取:
K(t)=max|E(t)|+η
(24)
其中η>0,E(t)为系统中不确定项。
进行稳定性分析如下:
(25)
将控制率代入式(25)得:

-K(t)|s|-εs-E(t)s≤-η|s|
(26)


输出为ΔK(t),定义为:
ΔK={NB,NM,ZO,PM,PB}
输入输出的隶属度函数曲线如图2、3所示。

图2 模糊输入隶属度

图3 模糊输出隶属度
设计以下5条模糊规则:





采用积分的方式对K(t)的上界进行估计,模糊滑模控制器系统结构见图4。

图4 模糊滑模控制器系统结构
2) 改进型快速终端模糊滑模控制器设计
为了提升电压响应时间,提高系统鲁棒性,采用快速终端滑模控制(fast terminal sliding mode control,FTSMC)对控制器进行优化。快速终端滑模在terminal吸引子的作用下,系统状态点可以在较短时间内进行收敛,且在负载扰动的情况下,能以较快的速度恢复至稳态,从而提升控制器的性能。快速终端滑模函数设计如下:
(27)
其中:Kp>0;p和q为正奇数且p>q;x1、x2分别为电压误差与电压误差的导数。
同样,选择由滑模面改进后的趋近率:

(28)
结合模糊算法,可以得到最终的控制量μ:
(29)
控制量μ的稳定性分析与2.3.1节类似,此处不再赘述。
3 仿真实验与分析
为了展示所设计算法的优越性,使用表1参数在Matlab/Simulink环境下对直流降压变换器进行仿真实验,并采取以上3种不同控制算法进行对比分析。为使参数合理,控制效果达到最优,普通滑模变结构控制(sliding mode control,SMC)与改进型SMC算法均采用改粒子群算法去参数进行在线的整定。
为保证变换器的快速性和优秀的稳态性能,粒子群粒子的适应度函数取:

(30)
当Fitness值取最小时,变换器的性能达到最优,实验参数如表1所示。

表1 实验参数
SMC参数见表2。经过改进粒子群优化后的控制器参数如表3所示。

表2 SMC参数

表3 改进型SMC参数
改进型模糊FTSMC控制器的参数继承改进型SMC控制器参数,并取p=3,q=1。
3.1 启动与稳态实验
在仿真实验中,算法1、算法2和算法3分别代指SMC控制器、改进型SMC以及改进型模糊FTSMC控制器。3种算法在Buck变换器启动时的性能曲线见图5。Buck变换器稳态性能见图6。

图6 Buck变换器稳态性能
据图5、6可知,算法1控制的Buck变换器在启动时存在明显的电压超调,在稳态时存在电压静差且纹波较大。算法2和算法3控制的Buck变换器稳态性能良好,在改进趋近律的积分作用下可以稳定输出12 V电压,其中算法3控制的Buck变换器在启动时电压无超调并明显削弱了抖振现象。

图5 Buck变换器启动性能
3.2 变负载鲁棒实验
Buck变换器进入稳态后,在0.01 s时刻对变换器进行变负载实验,负载电阻从12 Ω突降至6 Ω,变负载实验结果如图7所示。

图7 变负载实验结果
3.3 数据总结与分析
实验数据如表4所示。

表4 实验数据
实验数据表明,在附加积分型改进趋近率的PD型滑模降压变换器的2种控制算法中,变换器均能实现电压的无静差输出,其中改进型SMC控制趋近率引入了积分,在负载突变时产生了过积分现象,使得电压恢复时产生超调,且恢复时间长。
通过数据对比发现,改进型模糊快速终端滑模控制效果最优,输出电压纹波比其他3种控制算法减少了数个量级;在保证变换器启动时间短的条件下,良好实现了电压无超调到达稳态,且用时最少;在吸引子和模糊控制的共同作用下,有效削弱了过积分现象,提升了变换器的鲁棒性。
4 仿真实验与分析
为验证算法可行性和优越性,在Buck变换器样机中进行了SMC(算法1)、改进型SMC(算法2)以及改进型模糊FTSMC(算法3)3种算法控制下启动实验、稳态实验以及12 Ω到6 Ω的变负载实验。
启动实验、稳态实验和变负载实验的结果分别如图8—10、图11—13和图14—16所示。

图9 改进型SMC启动波形(755 μs)

图10 改进型模糊FTSMC启动波形(595 μs)

图11 SMC稳态实验曲线(11.8 V/P-P 320 mV)

图12 改进型SMC稳态实验曲线(12 V/P-P 160 mV)

图13 改进型模糊FTSMC稳态实验曲线(12 V/P-P 80 mV)

图14 SMC变负载实验曲线(P-P 640 mV/280 μs)

图15 改进型SMC变负载实验曲线(P-P 640 mV/168 μs)
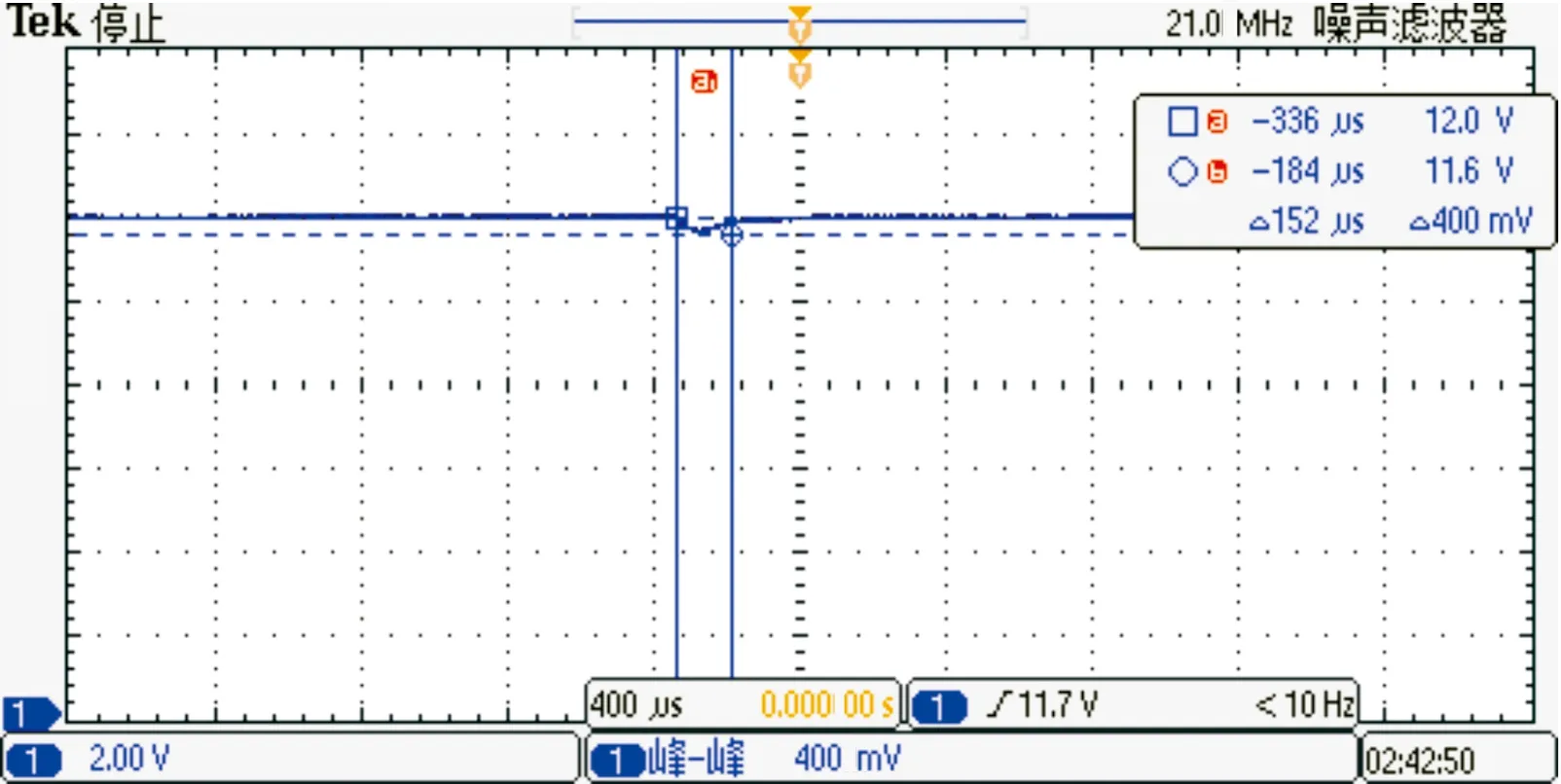
图16 改进型模糊FTSMC负载实验曲线(P-P 400 mV/152 μs)
可以看出,相比于SMC控制方法和改进型SMC控制方法,改进型模糊FTSMC控制的Buck变换器性能最优。在该方法下,变换器启动时输出电压到达稳态时间更短,超调量更少;稳态时输出稳态电压峰峰值为80 mV,精度更高;在电阻负载切换的情况下鲁棒性更好,电压动态调整率低且调整时间少,与仿真结果一致。
5 结论
针对普通滑模控制的直流降压变换器收敛精度低、鲁棒性不足的特点,提出一种修正滑动函数优化趋近率的控制方式,并进行了控制特性和稳定性的论证。通过仿真实验和实物验证发现,相对普通滑模控制,优化后的控制器的控制性能均有较大提升。其中,所设计的改进型模糊快速终端滑模控制器在直流降压变换器控制中表现优异,实现了输出电压的高精度与高鲁棒。基于修正滑动函数的趋近律改进策略为直流降压变换器的趋近律控制提供了新方法,可推广至其他领域的滑模控制当中。