基于水滴收集特征的SLD 探头外形参数化设计与仿真研究
2022-12-25曲仕茹王小辉
黄 雄,黄 莺,曲仕茹,王小辉,张 恒,陈 勇
(1.西北工业大学自动化学院,西安 710072;2.中国商飞上海飞机设计研究院,上海 201210;3.中国航空工业集团公司西安飞机设计研究所,西安 710089;4.西北工业大学航空学院,西安 710072;5.中国商用飞机有限责任公司,上海 200436)
结冰探测器是飞机结冰防护系统的重要部件,而过冷大水滴(Supercooled large droplet,SLD)环境结冰探测更是世界工程实践中的难点,包括探测设备和工程工具的能力与局限性等[1]。在EASA CS‑25 第18 次修订中新增的25.1420 条款要求下,飞机首先需要具备识别SLD 环境的能力,才能从该环境中脱离[1]。现有研究已提出多种面向SLD环境的识别技术,按探测方式的不同,可将SLD 结冰探测技术分为直接探测与间接探测两大类[2],其中间接探测中所采用的探头式技术在灵活性和可行性方面具备显著优势。美国Goodrich 公司、波音公司、中国商飞在2017—2019 年的专利中提出,通过在机体上连续多点布设结冰探头能够扩大对SLD 环境的有效探测范围,从而通过多个探头信息 融 合 实 现 对SLD 结 冰 的 探 测[3‑5]。美 国Rose‑mount 公司依据谐振式传感器外形设计了特殊的导流[6]和立柱构型[7],通过在谐振式探测器周围制造气流旋涡或绕流,使常规水滴和SLD 分别冻结在不同的探测器上,从而实现SLD 结冰条件探测。张洪等[8]提出了两种立柱式构型,并通过提高构型表面的水滴收集率,增大了探头冻结系数。肖春华等[9]提出了一种三圆柱的立柱式构型,3 个探头沿同一轴线排列,直径依次增加,兼顾了多种直径水滴结冰探测的需求。史献林等[10]提出了一种立柱式构型的改进方法,将不同直径的立柱嵌套在一起,通过引入光电传感器实现结冰探测,探头结构更加简洁。
但是,上述多种见诸报道的SLD 环境探头式探测技术在实用性方面仍然具有不同程度的局限性。例如前述多探头法受布设位置、数量的限制,对安装位置要求高,存在漏检风险;特殊流道法存在探头结构复杂、流道易结冰阻塞的问题;多立柱探头法存在探头冻结系数过小、结冰条件不易区分的问题。实际上,SLD 环境的探头式探测技术中最关键的问题是如何实现探头对SLD 环境特殊性的识别,将探头直接暴露于SLD 环境,其结冰特征需要与常规环境有显著差别,才能说明探头对SLD 环境探测的可行性。
本文设计了一种面向SLD 环境探测需求的双碰撞面探头[11‑13],考虑SLD 动力学模型,基于水滴收集特征开展探头外形参数化设计,研究了影响探头区分SLD 环境的关键几何参数,并通过仿真计算验证探头式探测技术对SLD 环境的识别能力。
1 双碰撞面SLD 探头外形设计
由于水滴在高速气流中主要受到惯性力和气动力的影响,SLD 存在最大水滴直径显著大于100 μm 的情况,这类直径水滴惯性更大,气动力作用条件下速度偏移量更小、轨迹更直,因而更为贴近壁面。由于边界层剪切应力作用效应存在,更小、更轻的水滴倾向于远离壁面。因此可以基于上述差异较大的水滴撞击特性设计双碰撞面SLD 探头[13]。依据边界层理论中的剪应力作用,增加常规水滴绕过探头第二碰撞面的边界层厚度,同时保证SLD 能够撞击第二碰撞面,以此区分常规水滴与SLD 结冰环境。
边界层厚度δ(x)与空气流雷诺数Rex及前缘距离x有直接关联

在此设计思路下,如图1 所示,常规水滴撞击探头斜面A后将直接结冰,而SLD 在撞击斜面A后将产生破碎、溢流的现象,液态水比例明显增加。常规水滴的运动轨迹则因受边界层剪切应力影响较大,其理想绕流沿探头表面法向向外推移,阻碍了绝大部分的常规水滴撞击斜面B。而SLD 由于受自身惯性力影响较大,在表面张力和空气剪切力作用下会产生变形,SLD 的阻力模型不再满足刚性球体的假设,很大程度取决于受力之后的变形效应,因此其中一部分从斜面A溢流并受气流影响在涡区结冰,另一部分SLD,保持原有的运动轨迹,直接撞击到探头斜面B并结冰。

图1 双碰撞面SLD 探头外形设计原理图Fig.1 Design principle of SLD ice probe with double impact surfaces
2 探头外形参数化设计
为了使常规水滴和SLD 结冰条件能够在探头不同位置具有不同的水滴收集特征,并且在两个碰撞面上的结冰量差异更明显,对探头外形进行参数化分析,归纳为图2 所示的13 个参数。为了研究不同外形参数对探头水滴收集特征的影响,设计了9 组不同的探头外形参数,分别研究探头前端参数θ1、L2、L5、R2以及探头后端参数θ2、L3、L6对探头水滴收集特征的影响。探头外形1~9 的参数如表1所 示。外 形1~4 主 要 差 别 是θ1和R2,外 形2、5~6主要差别是θ2和L2,外形2 和7 主要差别是θ1和L2,外形8 和9 主要差别是L5和L6。外形1~7 与外形8~9 对比主要是研究L3的影响。
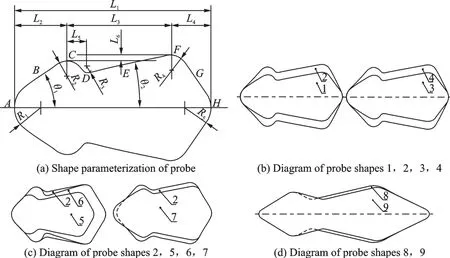
图2 双碰撞面SLD 探头外形参数化设计Fig.2 Parametric design of SLD probe with double impact surfaces

表1 探头外形参数设置Table 1 Parameters of probe shapes
3 SLD 动力学模型
3.1 SLD 阻力模型
对于SLD 而言,在运动过程中会从球形逐渐向扁圆盘形变化,需要对阻力模型CD,droplet进行修正。提供的方法为:将球体阻力系数CD,sphere与扁圆盘阻力系数CD,disk进行加权平均[14]

式中e为球体阻力系数权重。
3.2 SLD 破碎模型
对于SLD 结冰数值的模拟,通常采用泰勒类比模型[14]。在此基础上,加载水滴破碎和水滴变形模型以实现对SLD 结冰模拟。当水滴振荡频率达到某一阀值时,水滴的形态就会发生变化:大水滴发生变形,同时形成一群小水滴。在水滴的形态发生变化的过程中,其也由原来的球体形态变化成其他形态[15‑16]。同时,水滴所受到的力也将发生变化。
控制水滴变形的方程为[14]

式中:F为水滴在流场中受到的压力;k为水滴因表面张力影响的恢复系数;x为破碎水滴赤道与其为球形时赤道间的位移量;d为空气阻力;t为时间;m为水滴质量。方程的系数来源于泰勒类比
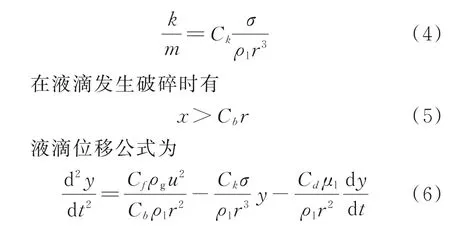
式中:y=x/(Cbr);r为未发生变形前的液滴的半径;ρ1、ρg分别为分散相与连续相的密度;u为液滴的相对速度;Cb为水滴衡量尺度;μl为水滴黏性;Cf、Ck、Cd为常数,结合实验数据可以求得:Cf= 1/3,Ck= 8,Cd= 5。u为水滴相对于壁面的法向速率。
由于TAB 模型的假设限制,其仅适用于较小We数下的水滴破碎模拟。为了扩展水滴破碎的模拟范围,在模拟需要用多因素判定破碎模型(Multifactor‑effected breakup,MEB)[17]。将Re数和We数共同作为水滴破碎的判定。不同破碎形式的两条分界曲线为[16]
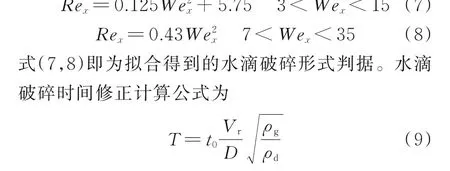
式中:t0表示表面张力失稳时所需要的破碎时间,一般取22.43 ms;D为液滴粒径;ρd为水滴密度;Vr为水滴和空气的相对速度。
3.3 SLD 飞溅模型
水滴飞溅模型包含了飞溅质量损失和水滴展布模拟,根据Mundo等的理论[18],飞溅系数K定义为

式中:μd为水滴动力黏度;σd为表面张力系数。
当K>57.7 时判定有飞溅存在。水滴飞溅的质量损失率可表示为[16]

式中:m0为水滴总质量;ms为碰撞时引起水滴损失的质量;θ0为入射方向与壁面切向角;Kctr为引起水滴飞溅的临界值。当水滴运动方向与撞击面相垂直时,即θ0= π / 2,不会引起水滴质量的损失。
水滴撞击过程除了水滴飞溅引起水滴质量损失外,还引起了壁面的水层动量改变。对水层的影响可以按照增加的能量方式进行建模分析。水层能量增加量的控制方程为

式中:Mdroplet为水滴质量;v表示碰撞速度的法向分量;α为调整系数。
4 基于水滴收集特征的探头外形参数敏感性分析
4.1 多粒径尺度的水滴收集特征验证
考虑上述SLD 动力学模型[19],针对表1 不同参数下双碰撞面SLD 探头外形,开展探头水滴收集特征仿真研究,主要包括建立网格模型、流场计算和水滴轨迹计算3 个步骤。
为了验证水滴收集特征的计算精度,选取翼型NACA23012 作为标准算例进行计算验证,仿真计算条件如表2 所示。表中MVD 表示水滴中位体积直径,LWC 表示液态水含量。 算例中NA‑CA23012 翼型的网格划分如图3 所示,采用全六面体网格类型,分块方式采用了C 形劈分,上游加密网格大约位于10%特征长度处,次加密网格位于与特征长度相等的距离处,但不超过几何体实体表面在自由流速度方向上的最后一个网格节点,远场边界位于距离机翼表面3.5~4.5 个特征长度处。另外,通过控制壁面首层网格法向尺寸相对平均气动弦长足够小,保证了y+不大于1。翼型表面划分了致密的边界层网格,全场网格节点数为65 560,网格单元数为 97 816,网格最大偏度为0.652 752。
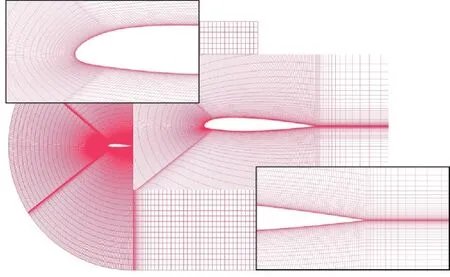
图3 NACA23012 翼型的网格划分Fig.3 Meshing of NACA23012 airfoil

表2 翼型NACA23012 标准算例计算条件Table 2 Calculation condition for NACA 23012 standard example
文献[21]中经试验验证的参考仿真结果及本文的仿真计算结果如图4 所示。表3 和表4 举例了部分距前缘线不同位置处水滴收集系数对比情况。

表3 常规水滴(MVD=40 μm)不同位置处水滴收集系数对比Table 3 Comparison of droplet collection coefficients at different positions of conventional droplets(MVD = 40 μm)

表4 过冷大水滴(MVD=110 μm)不同位置处水滴收集系数对比Table 4 Comparison of droplet collection coefficients at different positions of SLD (MVD = 110 μm)

图4 算例仿真计算结果对比Fig.4 Comparison between simulational and calculational results
取距前缘线不同位置的两种水滴情况下的水滴收集系数差异数值,本文的仿真结果与文献[21]之间的平均误差大约为7.932%,说明当前水滴收集系数仿真研究方法正确,可采用相同方法进行不同探头外形的水滴收集特征仿真研究。
4.2 基于水滴收集特征的探头外形参数敏感性分析
探头网格划分采用3.1 节中经过校核的网格划分方法,网格划分如图5 所示。采用全六面体网格类型,分块方式采用了O 形劈分,上游加密网格大约位于20%特征长度处,远场边界位于距离探头表面5 个特征长度处,通过控制壁面首层网格法向尺寸相对平均气动弦长足够小,保证了y+不大于1。探头表面划分了致密的边界层网格,全场网格节点数为68 680,网格单元数为103 372。

图5 探头外形的网格划分Fig.5 Meshing of probe shape
探头流场计算、水滴轨迹仿真需要根据常规水滴及SLD 结冰条件设置参数。考虑到飞机在起飞和着陆过程中总是以相对较低的速度遭遇结冰条件,因此将空气速度设置为70 m/s。常规水滴MVD 为40 um,水滴直径分布为Langmuir D;SLD MVD 为70 um,水滴直径分布采用文献[20]中的10‑bins,如表5 所示。

表5 水滴收集特征仿真计算参数Table 5 Parameters for water droplet impact simulation
常规水滴和SLD 结冰下探头外形1~4 的表面水收集系数如图6 所示。当处于常规水滴、且MVD 为40 μm 时,探头外 形1~4 斜面E上 的收集系数均很小,最大值分别为0.012、0.002、0.014 和0.003,其中探头外形1 和3 的水收集系数略大于探头外形2 和4 的水收集系数。但当处于SLD,且MVD 增 加 为70 μm 时,探 头 外 形1~4 斜 面E上 的水收集系数均明显大于处于常规水滴且MVD 为40 μm 的 收 集 系 数,最 大 值 分 别 为0.098、0.038、0.103 和0.047,其中探头外形1 和3 的最大收集系数约为探头外形2 和4 的2.5 倍。
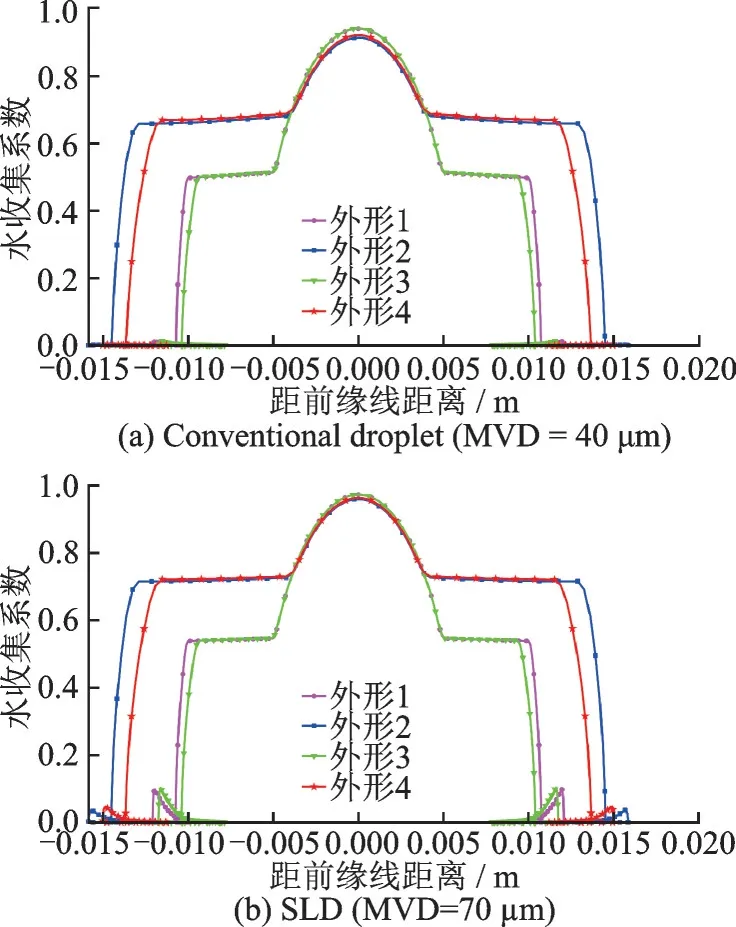
图6 探头外形1—4 表面水收集系数分布Fig.6 Distribution of water collection coefficient of probe shapes 1—4
从探头外形1~4 处于SLD,且MVD 增加为70 μm 时,斜面E上的水收集系数变化可以看出:θ1对斜面E上的水收集系数影响较大,θ1越大,收集系数越小;而R2对收集系数影响较小。
常规水滴和SLD 结冰下探头外形2、5、6、7 的表面水收集系数如图7 所示。当处于常规水滴且MVD 为40 μm 时,探头外形2、5、6、7 斜面E上的收集系数均很小,最大值分别为0.002、0.009、0.004 和0.006。相似地,当处于SLD 且MVD 增加为70 μm 时,斜面E上的收集系数均明显大于处于常规水滴且MVD 为40 μm 的收集系数,最大值分别为0.038、0.080、0.052 和0.068,其中探头外形5和7 的最大收集系数约为探头外形2 和6 的1.5 倍。

图7 探头外形2、5、6、7 表面水收集系数分布Fig.7 Distribution of water collection coefficient of probe shapes 2、5、6、7
从探头外形2、5、6、7 处于SLD,且MVD 增加为70 μm 时斜面E上的水收集系数变化可以看出:L2对斜面E上水收集系数影响较大,L2越小,斜面E上的水收集系数越大,L2增加可以抵消θ1减小对水收集系数的影响,而θ2对水收集系数影响较小。
常规水滴和SLD 结冰下探头外形8、9 的表面水收集系数如图8 所示。当处于常规水滴且MVD为40 μm 时,探头外形8、9 斜面E上的收集系数均很小,最大值分别为0.003、0.002。当处于SLD,且MVD 增加为70 μm 时,斜面E上的收集系数均明显处于常规水滴、且MVD 为40 μm 的收集系数,最大值分别为0.091、0.043,两者之间相差较大,但水收集系数曲线基本重合。

图8 探头外形8、9 表面水收集系数分布Fig.8 Distribution of water collection coefficient of the probe shapes 8、9
从探头外形2、5、6、7 处于SLD,且MVD 增加为70 μm 时斜面E上的水收集系数变化可以看出:L6越大,水收集系数越大,且呈指数增长,L6的增加可以提高斜面E对SLD 的捕获能力;L5对收集系数影响较小。
对比图2 中探头外形9 与外形2,前者L6是后者L6的3 倍 以 上,但 处 于SLD 且MVD 为70 μm时,斜面E上的水收集系数相差不大,表明L3尺寸的增加大大增加了探头边界层的厚度,从而减小了斜面E上的水收集系数。
综合上述9 个外形在不同条件下的水滴收集特征分布可以看出,探头的关键外形参数为L6、θ1、L2、L3。θ1、L2、L3越大,则边界层越厚,通过调节L6的高度,可以使常规水滴绝大部分仅能撞击到斜面B,而SLD 则能同时撞击到斜面B和斜面E,从而使不同直径水滴在探头不同位置结冰差异更明显,为实现常规水滴与SLD 结冰区分性探测奠定了基础。
从以上9 个探头外形中,可以看出处于常规水滴、且MVD 为40 μm 时斜面E上水收集系数最小的为探头外形2 和探头外形9,斜面E上水收集系数最大值都是0.002;而探头外形2 和探头外形9 处于SLD、且MVD 为70 μm 时,斜面E上水收集系数最大值为0.038,0.043,后者水收集系数优于前者,选取探头外形9 开展结冰仿真分析。
5 探头外形结冰仿真分析
针对探头外形9,对如表6 所示的4 种工况进行水滴收集特征及结冰仿真,参数设置方法与前述相同。其中工况1 和2 为常规水滴结冰,结冰条件按EASA CS‑25 第16 次修订附录C 所规定的结冰包线进行选择,工况3 和工况4 为SLD 结冰,结冰条件按附录O 所规定进行选择[22]。

表6 结冰仿真条件Table 6 Icing simulation condition
4 种工况下探头外形9 的水滴撞击特性仿真计算的液态水含量分布和水收集系数分布如图9所示。从液态水含量分布仿真计算结果可以看出,在MVD为在15 μm 的工况1和34 μm 的工况2的常规结冰条件下,探头周围的LWC 分布受边界层影响大,水滴运动曲线呈抛物线形状,水滴仅撞击到探头外形9的斜面B上,而在斜面E处,远离探头表面,斜面E上并无水滴收集,仍处于水滴遮蔽区内。随着MVD 的增加,水滴遮蔽区逐渐减小。在MVD 为在70 μm 的工况3 和250 μm 的工况4 的SLD 结冰条件下,探头周围的LWC 分布受边界层影响小,水滴运动曲线呈近似直线形状,水滴撞击范围从斜面B扩展到了斜面E,特别是当MVD 为250 μm、且处于SLD 结冰条件时,在斜面E上有较明显的水滴收集,这是由于此时最大水滴直径本身质量大,受边界层气流作用小,几乎沿直线撞击在第二碰撞面上。

图9 探头外形9 的液态水含量分布和水收集系数分布Fig.9 LWC and water collection coefficient of probe shape 9
从探头外形9的水收集系数分布可以看出,随着MVD的增加,常规水滴结冰条件向SLD 结冰条件变化,斜面B上的水收集系数逐渐增加,最后趋于稳定。而斜面E上的水收集系数,从小到大,并且随着MVD的增加,常规水滴结冰条件向SLD 结冰条件变化,斜面E上的水滴撞击范围和水收集率明显增大。
4 种工况下探头外形9 的60 s 结冰量分布计算结果如图10 所示,探头表面结冰分布与水收集系数分布一致。图10 工况1 和工况2 常规水滴结冰条件下,仅在探头前缘和斜面B上结冰,随着MVD 的增加,斜面B上的结冰量和结冰范围不断增加;工况3和工况4 SLD 结冰条件下,结冰范围扩展到了探头的斜面E,虽然工况3 时斜面E的结冰量较少,但随着MVD 增加,工况4 在斜面E上有明显结冰。

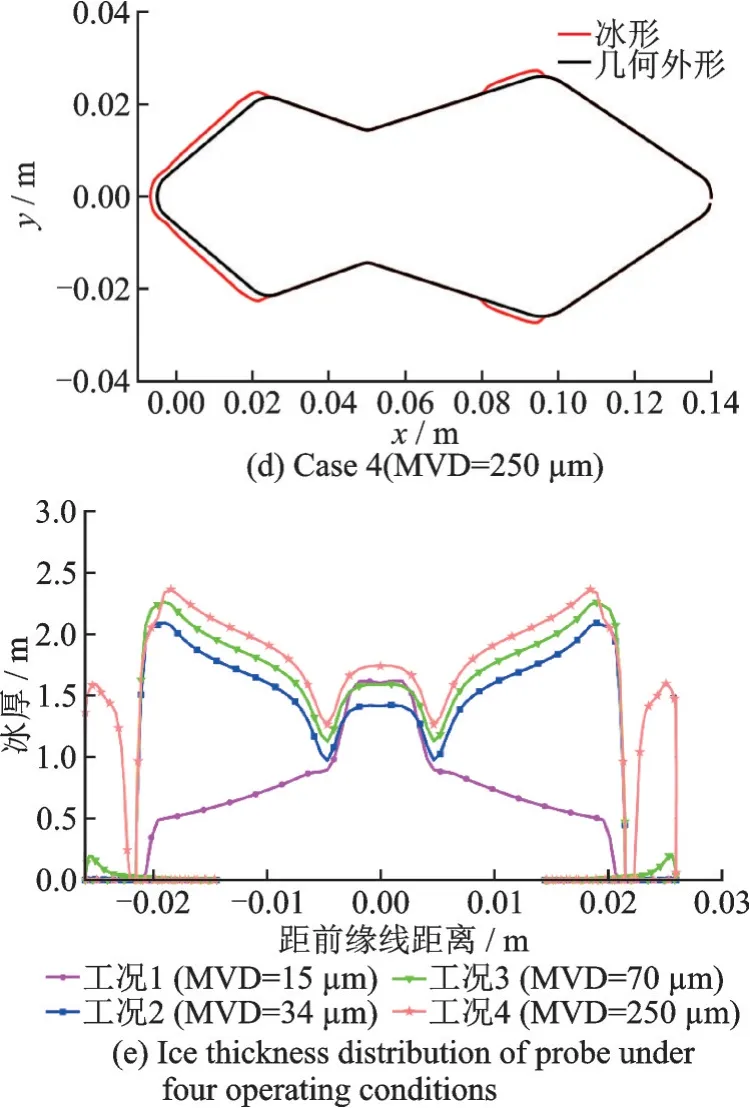
图10 探头外形9 在不同工况下的结冰量分布Fig.10 Distribution of icing amount of probe shape 9 under different working conditions
为了进一步验证大液态水含量条件下,常规水滴溢流结冰对探测器表面结冰量分布的影响,在如表7 所示的两种工况下进行120 s 结冰仿真。工况5 和工况6 条件下仿真计算结果如图11 所示,两种结冰条件下,探测器表面结冰主要在探测器前缘及斜面B上,斜面E上结冰量均小于0.05 mm。
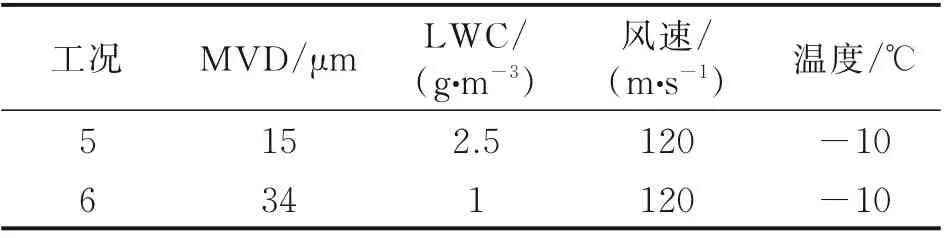
表7 大液态水含量结冰条件Table 7 Icing conditions with large LWC
图11 探头外形9 在工况5 和6 下的结冰量分布Fig.11 Distribution of icing amount of probe shape 9 under working conditions 5 and 6
综上仿真计算结果表明,在不同仿真条件下,常规水滴主要在探头外形9 的前缘及第一碰撞面上结冰,即使有溢流结冰,在第二碰撞面上的结冰量也很少;而SLD 则能同时在第一和第二碰撞面上结冰,且第二碰撞面上的结冰量较大,不同直径的水滴在探头外形9 的不同位置结冰的差异性明显。
6 结 论
本文针对一种面向SLD 环境探测需求的双碰撞面探头,考虑SLD 动力学模型,基于水滴收集特征进行探头外形参数化设计研究,厘清影响探头区分SLD 环境的关键几何参数,从而为探头外形设计提供理论依据。本文主要结论如下:
(1)考虑SLD 动力学模型的仿真方法可以描述SLD 在阻力分析、飞溅和破碎等方面的特殊性,获得与试验结果较一致的仿真结果,为探头外形参数化设计与验证分析提供基础支撑。
(2)能够有效区分常规水滴及SLD 结冰的探头外形需要至少两个碰撞面,增加探头前缘夹角、第一碰撞面和第二碰撞面的长度可以使水滴远离第二碰撞面,而增加探头第二碰撞面与第一碰撞面的相对高度差,可以提高第二碰撞面对水滴的捕获能力。通过调整探头关键外形参数,可以使常规水滴大部分撞击到探头的第一碰撞面,而使SLD 同时撞击到探头的第一和第二碰撞面。
(3)探头表面结冰分布与水收集系数分布一致。在常规水滴环境下,主要在探头前缘和第一碰撞面上结冰,第二碰撞面上的结冰很少;而在SLD环境下,结冰同时发生在探头的第一和第二碰撞面上,并且随着水滴直径的增加,在第二碰撞面上的结冰越明显。
通过对双碰撞面探头进行参数化设计,调整影响探头关键几何参数,可以使不同直径的水滴撞击到探头不同位置,并在探头上形成差异明显的结冰,为SLD 环境区分性探测提供了可行方案。下一步将在此基础上,针对冻毛毛雨和冻雨状态不同水滴分布情况(MVD 大于和小于40 μm)、不同飞行速度/空气密度/探头表面材料等条件深入分析,并结合优化算法提炼出探头外形参数设计函数。
