声纳探测技术在水利工程渗漏点检测中的应用
2022-12-24温旋
温 旋
(江苏省工程勘测研究院有限责任公司,江苏 扬州 225002)
作为水利工程中重要组成部分,水库堤坝在整个水利系统中发挥着重要的作用,其具有泄洪、防洪、灌溉以及城乡供水等功能,能够产生巨大的经济效益和社会效益。近几年,水利行业迅速崛起,在国家政策的扶持、政府的领导下,水利工程数量和质量正在不断提升,截至到2017年,国内已经修建完整并投入使用的水库堤坝共13.26万余座,其中中大型水库堤坝占46.41%,水库容量已经达到6894.36亿m2,水利工程已经达到一个比较高的水平[1]。受到水利工程质量、自然环境、施工条件等因素影响,水库堤坝会存在一定的安全隐患,比如水库堤坝渗漏,这一安全隐患会随着时间的增加而愈演愈烈,当渗漏数量、渗漏量超出一定标准时,会严重影响到水库功能正常发挥,严重情况还会导致水库堤坝上游和下游边坡失稳,造成严重的社会经济损失。为了解决这一问题,保证水库堤坝的稳定性和安全性,需要对水库堤坝渗透点进行定期检测,及时掌握水库堤坝渗漏情况,对渗漏点进行修复。由于国内水库堤坝渗漏点检测研究起步比较晚,相关理论与技术还不够成熟,现有的检测方法在实际应用中经常出现错误检测现象,误检率较高,不能满足水库堤坝渗漏点检测在精度方面的需求,使得水库堤坝运行存在一定的安全隐患。
为了解决上述问题,本文提出基于声纳探测技术的水库堤坝渗漏点检测方法,以期提高监测精度,促进水利工程的使用安全。
1 水库堤坝渗漏点检测方法设计
1.1 水库堤坝声纳探测
根据水库堤坝渗漏点检测需求,本次采用声纳探测技术对水库堤坝渗漏情况进行测量,获取到相关数据信息,具体探测过程如下。
测点布设:测点布设于水库堤坝墙前与后两侧,测线与水库堤坝轴线平行,在近堤坝水面的15~17m处布设测线,每隔4.5~5.5m布设一条,测线上测点间隔距离为5m。探孔钻取:在测点位钻取钻孔,为了保证检测效率,并且结合水库堤坝修建材质,选择型号为OSFAF-5464钻机,将钻机垂直于坝面。钻孔的作用是使声纳探测仪顺利进入到水下进行测量,因此钻孔孔径要大于比声纳探测仪宽度,超出数量不能高于声纳探测仪宽度的一半[2]。钻孔深度需要根据实际情况确定。钻取好钻孔后,将事先准备好的声纳探测仪放入到钻孔内,对声纳探测仪的坐标进行定位,将声纳探测仪的横坐标与水库堤坝的轴线平行,在测量长度内,沿着水库堤坝两端,在岸边埋设好钢筋,每隔5.5m埋设一根钢筋,使用螺栓将钢筋锚固,将其固定好间距为5.5m标记线,从而形成一个5.5m×5.5m的网格,控制线选定在5.5m×5.5m钢筋网格上方。声纳探测仪的纵坐标与水库堤坝面垂直,利用经纬仪作垂线,并将纵坐标的控制线选定在两个相邻堤坝面的接缝上[3]。声纳探测仪的斜坐标与水库的水面垂直,声纳探头在每一个5.5m×5.5m钢筋网格的节点处实施测量,声纳探测仪斜坐标代表的是测点处的水深。声纳探测仪主要由一个声纳探头、两个传感器个一个读卡器组成,其具体结构如图1所示。
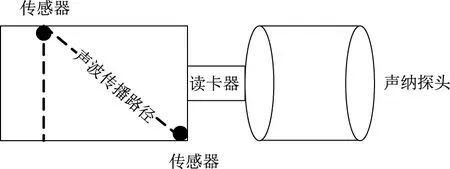
图1 声纳探测示意图
坐标定位后声纳探头对四周进行探测,其主要是向四周发射声波,声波经过传播路径传播,在传播过程中会遇到障碍物(水),遇到障碍物后声波传播速度和方向会发生改变,最终被传感器接收[4]。传感器接收到反射声波信号后,被读卡器读取。按照上述流程对各个测点进行探测,将获取的数据上传到计算机上,用于后续水库堤坝渗漏拟合分析。
1.2 水库堤坝渗漏数据识别
由于受到一些因素影响,水库堤坝声纳探测获取到的数据并非全部为渗漏相关数据,其中还存在大量无效数据、重复数据,为了保证后续水库堤坝渗漏拟合分析精度,采用模糊聚类分析技术对水库堤坝渗漏数据识别。模糊聚类分析技术识别目标数据,是根据距离关联对探测数据进行模糊处理,假设声纳探测周期为T,如果声纳探测到的障碍物为静止状态,那么在探测周期内障碍物的位置不会发生改变,这种情况为水库堤坝不存在渗漏,此时水库堤坝内的水为静止,当水库堤坝存在渗漏,水库堤坝内的水会处于流动状态,那么在探测周期内障碍物的位置会发生变化[5]。考虑到声纳探测仪存在一定的探测误差,因此结合以上两种情况,将水库堤坝内的水活动区域选定在一个圆形区域m内,活动区域的半径为r,该参数决定声纳探测数据的精度。假设在声纳探测周期内,水的流动方向与速度是恒定不变的,并且运动状态不会发生随意变化,但是在不同的探测周期上水的流动方向与速度又是可变的,此时就符合水库堤坝渗漏条件,那么有:
(1)
式中,v(t)—在时刻t水库堤坝内水的流动速度;v(t+1)—在下一时刻水库堤坝内水的流动速度;L(t)—在时刻t水库堤坝内水的流动方向;L(t+1)—在下一时刻水库堤坝内水的流动方向[6]。已知水库堤坝内水的坐标位置,根据公式(1)可以确定在n个探测周期后水的坐标位置。当水库堤坝内没有存在渗漏,堤坝内的水是沿着m周边做运动时,此时水的流动距离最远,将其作为距离阈值,其计算公式为:
(2)
公中,d—距离阈值;x1、y1—第一个探测周期内探测到的水的横坐标与纵坐标;xn、yn—第n个探测周期后水的横坐标与纵坐标[7]。定义模糊相似关系阈值为α,假设声纳探测到的数据与历史探测数据存在一定的相关性,则数据为目标数据,其判断公式为:
α≥dϖg
(3)
式中,ϖ—探测数据集的权重因子;g—加权函数[8]。利用模糊相似矩阵对探测数据分类处理,并对探测数据集的权重因子进行迭代更新,将探测数据带入到公式(3)中,如果关系成立,则渗漏数据识别输出为1,表示该组数据与历史观测数据不相关,水库堤坝内水的流动距离大于距离阈值,在该探测周期内水的流动方向与速度发生了变化,数据集为水库堤坝渗漏数据;如果关系不成立,则渗漏数据识别输出为0,表示该组数据与历史观测数据相关,水库堤坝内水的流动距离小于距离阈值,在该探测周期内水的流动方向与速度没有发生变化,数据集为非水库堤坝渗漏数据。按照上述标准对获取到的声纳探测数据进行分类,识别到目标数据。
1.3 水库堤坝渗漏场拟合分析
利用识别到的水库堤坝渗漏数据,对水库堤坝渗漏场进行拟合分析,确定具体渗漏情况。当声波遇到不同的障碍物,传播路径与传播速度会发生改变,顺流方向声波的传播路径更长,传播速度也会更大,而逆流方向声波的传播路径则会减小,传播速度也会降低。假设声纳探测仪上两个传感器为A与B,声波在两个传感器之间传播,利用声波的传播关系,对测点处水的流动速度进行计算,其计算公式为:
(4)
式中,U—测点处水流体通过两个传感器之间声道上的流动速度;H—声波在两个传感器之间声道上的传播路径长度;B—声波在两个传感器之间声道上的传播路的轴向分量;W—声波从传感器A向传感器B传播时间;Q—声波从传感器B向传感器A传播时间[9]。利用上述公式计算出水库堤坝渗漏速度,再根据声波传播路径长度,计算出水库堤坝渗漏面积,其计算公式为:
(5)
式中,S—水库堤坝渗漏面积;N—水库堤坝渗漏点数量;z—两个传感器之间的间距[10]。利用上述公式计算出水库堤坝渗漏面积,从而实现基于声纳探测技术的水库堤坝渗漏点检测。
2 实验论证分析
实验以某水库堤坝为实验对象,该水库堤坝属于均质土坝,最大坝高为19.62m,最小坝高为16.72m,坝顶高程为176.95m,坝顶宽为5.5m,坝顶轴线长度为132.65m,上游坝坡坡比为1∶2,中游坝坡坡比为1∶3,下游坝坡坡比为1∶2∶3,水库总容量为364.61m3,水库正常蓄水位为156.41m,校核洪水位为176.64m。该水库堤坝年久失修,经常出现渗漏问题,利用此次设计方法与传统方法对该水库堤坝渗漏点进行检测。根据该水库堤坝实际情况,此次选择的声纳探测仪型号为AFGET-4641HC,布置测线16条,测点数量为162个,其中水库堤坝墙前测点82个,水库堤坝墙后测点80个,测量面积为12643m2,测线长度为60m,钻孔孔径大小为45.55mm,钻孔深度为23~28m,具体见表1。

表1 声纳检测孔布设情况
实验中声纳探测仪测量数据量为16.42GB,识别到渗漏数据为5.62GB,通过对渗漏数据分析,检测到该水库堤坝渗漏点数量共1031个,其中集中渗漏点462个,强渗漏点264个,其余为缓渗漏点。将检测结果与水库堤坝渗漏监测情况对比,计算出两种方法误检率,将其作为此次实验唯一指标,具体数据见表2。

表2 两种方法误检率对比
通过对上表中数据分析可以得出以下结论:设计方法在本次实验中误检率平均为0.15%,最高误检率仅为0.36%,最小误检率可以达到0.06%,说明设计方法在应用中水库堤坝渗漏点错误检测次数较少,具有较高的检测精度,检测结果基本与水库堤坝渗漏情况基本一致;而传统方法在本次实验中误检率平均为7.16%,最高误检率为9.14%,最小误检率为5.29%,远远高于设计方法,实验结果证明,在检测精度方面,设计方法优于传统方法,更适用于水库堤坝渗漏点检测。
3 结语
此次将声纳探测技术应用到水库堤坝渗漏点检测中,提出一种新的水库堤坝渗漏点检测思路,并通过实验验证了该思路的可行性,有效提高了水库堤坝渗漏点检测精度,解决了水库堤坝渗漏点误检率高的问题,能够为水库堤坝渗漏修复提供有力的数据依据。
