机器人辅助训练下脊髓损伤患者康复效果的Meta分析
2022-12-22廖晨霞李伦兰张新兰刘静汪晶高馨
廖晨霞 李伦兰 张新兰 刘静 汪晶 高馨
(安徽医科大学第一附属医院,安徽 合肥 230022)
脊髓损伤(spinal cord injury,SCI)是致残率极高的脊柱损伤疾病[1]。在我国SCI患者总人数已突破百万,并以每年12万的速度剧增,呈现逐年升高的趋势[2]。SCI患者常伴截瘫,极大地影响了患者生活质量,目前主要靠后期的康复训练促进机体功能恢复[3]。康复锻炼方式主要包括物理疗法,康复师辅助训练等[4]。近年来,机器人辅助训练逐渐发展成为一种针对神经系统疾病患者的新治疗方法[5-6]。机器人辅助训练主要通过康复机器人,采用多样化的模式对患者进行康复训练,利用配备的各类传感器记录人体运动学和生理学等特征,为改进和优化康复方案提供数据支撑[7],相较于人工训练,一方面降低了康复医护人员工作强度,另一方面提高了患者康复训练的定量化、系统化、个性化和科学化。然而,机器人辅助SCI患者功能恢复的疗效报道不尽相同,其有效性尚未得到完全的认可。本研究旨在对机器 人辅助训练下SCI患者康复效果进行Meta分析,以期为机器人辅助训练的临床实践和推广提供循证依据。
1 资料与方法
1.1文献纳入和排除标准 纳入标准:(1)研究类型为RCT研究。(2)研究对象年龄≥18岁,磁共振确诊为SCI,根据美国脊髓损伤协会(American spinal cord injury association, ASIA)制订的ASIA分级为标准,分级为A、B、C、D、E级;病情稳定意识清楚,被建议进行机器人辅助训练(A、B、C、D、E级患者都被纳入),无合并心血管、呼吸、肿瘤等疾病。(3)干预组实行机器人辅助训练,对照组实行常规干预(如物理疗法,人工辅助训练,包括没有干预)。(4)结局指标包括6 min步行距离(6-minute walking test,6MinWT),10米步行速度(10 m walking speed,10MWT),伯拉格平衡量表评分(berg balance scale,BBS),脊髓独立测试(spinal independence measure,SCIM-III),脊髓损伤步行指数(spinal cord injury walking index ,WISCIⅡ),计时起立-行走测试 (timed up and go test,TUGT)。排除标准:(1)非RCT研究,研究设计不严谨。(2)重复发表文献。(3)无法提取完整数据。(4)无法获得全文。(5)比较不同类型机器人的康复疗效。
1.2文献检索策略 检索中国期刊网全文数据库 (CNKI)、万方数据库 (WF)、中国生物医学文献数据库 (CBM)、维普信息资源系统 (WP) 、PubMed、Web of Science、Cochrane Library、Medline、数据库,检索日期限制为建库至2020年2月,手动检索纳入研究的参考文献及与主题相关的综述,中文检索词为(机器人or机器人辅助)and(脊髓损伤),英文检索词为(robot or robot assistance or robot assistant or robotic assisted) and(spinal cord injury or spinal injury or SCI)。以PubMed为例,见框1。
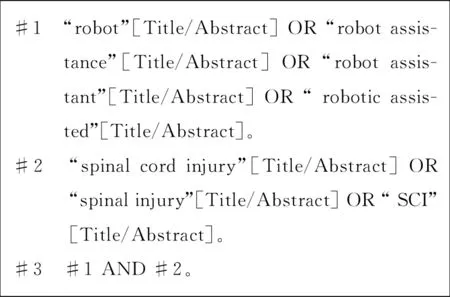
框1 PubMed检索策略
1.3文献筛选、质量评价和资料提取 由2名经过系统培训的研究员根据纳入排除标准筛选文献,依据Cochrane Handbook For Systematic Reviews of Interventions (5.1.0)[8]标准评价文献质量:(1)随机方法的正确性。(2)随机方案的分配隐藏。(3)研究者和研究对象是否采取盲法。(4)结果测评者是否采取盲法。(5)结局指标是否完整。(6)对研究结果是否选择性报告。(7)有无其他方面偏倚。若文献完全满足上述标准,质量为A级;若部分满足上述标准,质量为B级;若完全不满足上述标准,质量为C级。独立评价文献质量后,2名研究员根据上述标准对文献质量进行讨论,对于纳入和排除的文献需要2名研究员达成共识,当出现不同观点时,讨论协商询问第3方意见。筛选完成后,按照要求提取纳入文献资料,主要包括作者、发表年份、国家、样本量、年龄、干预措施、结局指标和干预时间。

2 结果
2.1文献检索结果 经数据库初步检索出文献979篇,经Notepress剔除重复文献347篇,剩余632篇,阅读问题和摘要后筛选出52篇,精读全文后纳入11篇[11-21]进行Meta分析,样本量共计448例,干预组206例,对照组242例,文献筛选流程图,见图1。
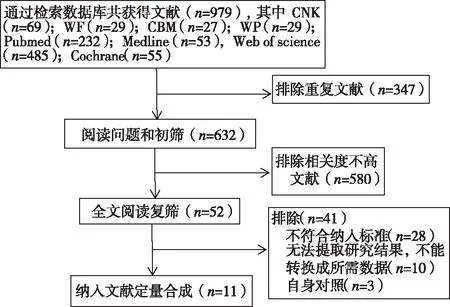
图1 文献筛选流程图
2.2纳入研究的基本特征 文献基本特征,见表1。本研究文献中结局指标的提取时间多在4周和8周,其中有2篇文献[16,18]结局指标的提取时间为4个时间节点(0,1周,2周,4周),为了更好的控制时间变量对结果的影响,我们提取4周时的结局指标。
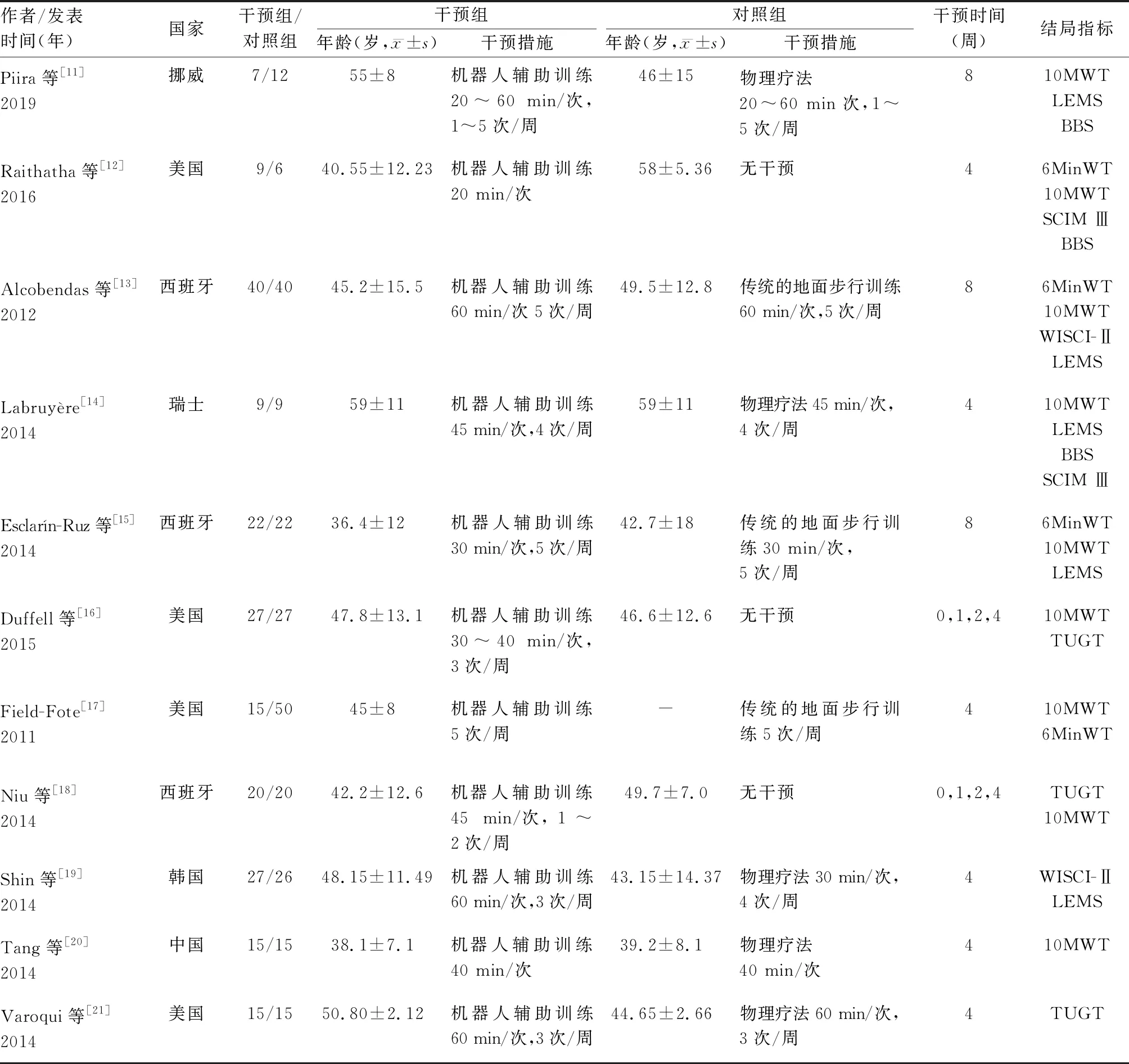
表1 纳入研究的基本特征
2.3文献质量评价 共纳入11篇文献,根据Cochrane Handbook For Systematic Reviews of Interventions (5.1.0)[8]标准评价文献质量,4篇为A级,7篇B级。Cochrane偏倚评估,见图2和图3。纳入文献质量评价,见表2。扫二维码见图2和图3。

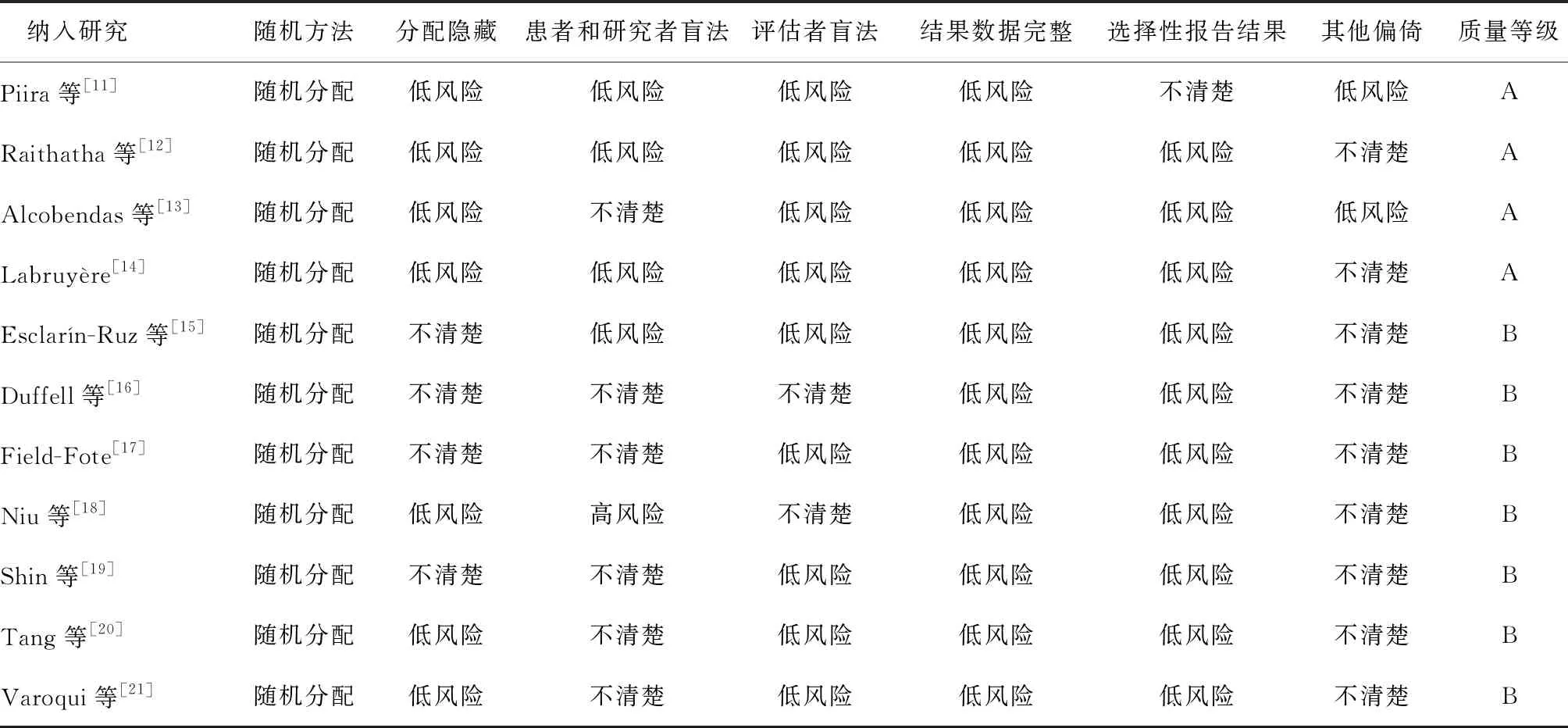
表2 纳入文献质量评价
2.4Meta分析结果
2.4.16MinWT 4篇文献[12-13,15,17]使用6MinWT测量患者的步行距离,共计169例患者。合并结果显示异质性小(I2=45%,P=0.14),选择固定效应模型分析,差异有统计学意义,机器人辅助训练组6MinWT结果优于常规训练组 (MD=0.34,95%CI:0.03~0.64,P=0.03),见图4。

图4 机器人辅助训练对SCI患者6MinWT的影响
2.4.2SCIM Ⅲ评分 2篇文献[12,14]使用SCIM Ⅲ评分评估患者的日常生活能力,共计33例患者,结果无异质性(I2=0%,P=0.32),选择固定效应模型分析,结果显示差异具有统计学意义,机器人辅助训练组SCIM Ⅲ评分结果优于常规训练组 (MD=12.38,95%CI:7.44~17.32,P<0.000 1 )。见图5。

图5 机器人辅助训练对SCIM Ⅲ的影响
2.4.3下肢运动评分 5篇文献[11,13-15,19]使用LEMS评分评估患者的双下肢运动功能,共计214例患者。结果无异质性(I2=0%,P=0.46),选择固定效应模型分析,差异具有统计学意义,机器人辅助训练组对LEMS评分的影响优于常规训练组(MD=2.43,95%CI:0.29~4.57,P=0.03),见图6。
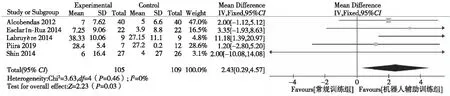
图6 机器人辅助训练对LEMS的影响
2.4.4WISCIⅡ评分 2篇文献[13,19]使用WISCIⅡ评分评估患者的步行能力和步行灵活性,共计133例患者。结果无异质性(I2=0%,P=0.97),选择固定效应模型分析,差异有统计学意义,机器人辅助训练组对WISCIⅡ的影响优于常规训练组(MD=3.10,95%CI:1.72~4.29,P<0.000 01),见图7。

图7 机器人辅助训练对WISCIⅡ的影响
2.4.5TUGT评分 3篇文献[16,18,21]使用TUGT评分评估患者的起立行走能力,共计122例患者。结果无异质性(I2=30%,P=0.24),选择固定效应模型分析,差异有统计学意义,机器人辅助训练组TUGT评分要高于常规训练组(MD=0.58,95%CI:0.15~1.01,P=0.009)。见图8。

图8 机器人辅助训练对TUGT的影响
2.4.610MWT 9篇文献[11-18,20]使用了10MWT测量患者的步行速度,共计388例患者。合并结果存在异质性(I2=83%,P<0.000 1),选择随机效应模型分析,差异无统计学意义。因存在异质性进行敏感性分析,剔除1项对结果影响较大的研究[11]后异质性检验(I2=50%,P=0.05),故采用固定效应模型,合并效应仍无统计学意义,故2组患者10MWT比较,差异无统计学意义 (MD=-0.02,95%CI:-0.04~0.00,P=0.12)。
2.4.7BBS评分 3篇文献[11-12,14]使用BBS评分评估患者的平衡能力,共计52例患者。结果无异质性(I2=0%,P=0.83),选择固定效应模型分析,差异无统计学意义,故2组患者BBS评分比较,差异无统计学意义(MD=-2.01,95%CI:-5.09~1.07,P=0.20)。
2.4.8发表偏倚 本研究共纳入11篇文献,其中9篇文献的结局指标包括10MWT,针对10MWT结局指标绘制漏斗图检验发表偏倚,各研究点左右分布稍不对称,提示有存在发表偏倚的可能,见图9。
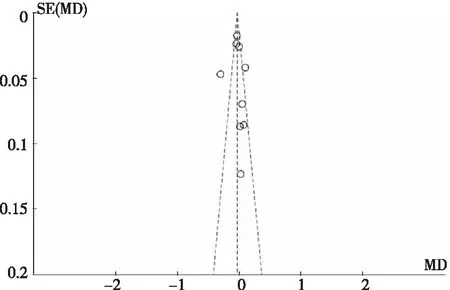
图9 机器人辅助训练与常规训练比较下10MWT的漏斗图
3 讨论
3.1机器人辅助训练应用于SCI患者的临床意义 本研究纳入的SCI患者包括了ASIA分级中的A~E级患者,即涵盖了完全性和不完全性损伤的SCI患者,因此机器人辅助训练对于不同损伤程度的SCI患者都具有一定的临床意义,与Cheung等[22]研究结果一致。本研究共纳入11篇研究,结果显示:机器人辅助训练组在6MinWT、LEMS评分、SCIM Ⅲ评分,WISCIⅡ评分及TUGT评分要优于对照组。相较于常规训练,机器人辅助通过增加训练时间和训练强度提高了步行耐力,使患者能在6MinWT测试更优机器人辅助主要对下肢肌力和步行功能进行强化训练[23-24],提高了患者双下肢运动功能;机器人辅助提供高精度、高强度、高重复性的训练,增强了与正常运动相关的传入反馈,促进了脑区激活和神经重塑,从而增强患者肢体灵活性,提高其生活自理能力[25];机器人辅助可帮助SCI患者更早的进入步态训练,且步态训练模式具有生理性,允许患者在30 min的疗程中练习1 000步,远高于常规训练的50~100步[26],因此可提高患者的步行能力和起立行走能力;此外,机器人辅助训练可实时地反馈运动参数,精确的测量运动强度和运动效果,从而不断完善患者的康复计划;同时机器人辅助训练可提供人机互动游戏,提升患者训练过程中的愉悦感,激发训练的主动性和积极性[27-28]。
3.2机器人辅助训练对SCI患者10MWT和BBS的影响尚不明确 Itoh等[29]的案例报告分析指出机器人在改善患者步行能力的同时,可帮助其提高步行速度;Aguirre等[30]却分析得出机器人辅助训练并不能提高患者的步行速度。可见,机器人辅助训练对10MWT和BBS的影响尚不明确,一方面可能是因为常规训练对SCI患者的康复同样起到了积极的作用;另一方面机器人辅助训练允许为患者提供协助来完成任务,降低了患者在康复中的主动参与性,不利于提高其在现实环境中的行走速度[31]。此外,这种结果的不同可能与各研究间干预的时间、频率及样本量不同有关。现阶段,机器人辅助训练的强度、难度、频率及周期等尚无明确统一的标准,康复效果也未得到完全的肯定;此外,机器人辅助训练的费用较为昂贵,对于经济负担较重的SCI家庭,难以承担康复费用,因此临床推广受到一定的限制[32-33]。
3.3机器人辅助训练对临床护理实践的启示
3.3.1强化护理人员的学习意识以提升智慧服务能力 相关研究[34]指出,随着机器人研究技术的不断成熟,将来会在临床进行大范围的运用,护士将是它们最密切的合作伙伴。因此,成立学习小组(包括医生、护士、康复师和机器人设计者等),交流学习机器人训练相关知识,从而提高护理人员对机器人辅助训练使用规范,使用原理、报警处置及数据提取等知识的掌握和理解。
3.3.2成立宣传和技术指导小组以提高机器人辅助训练接受度 提高患者对机器人辅助训练的接受度是开展机器人辅助训练的重要前提,为保证患者轻松的使用机器人进行康复训练,须成立宣传小组并建立相应的健康宣教栏,通过宣传手册、视频及真人演示等多样化方式,方便患者获取所需信息,提升机器人辅助训练技术“可及性”。同时,实施康复训练前应确保操作技术支持,可成立机器人辅助训练操作技术指导小组对患者及照顾者进行培训并随时跟进,及时解决技术难题。此外,可根据患者损伤类型和体验反馈与康复科合作对设备功能进行设计或改进以增加患者锻炼意愿。通过医-护-患合作,制定针对性的训练计划,提高康复训练的依从性,鼓励其逐渐减少在训练过程中对机器人提供协助的依赖度,从而帮助患者平衡好在机器人辅助训练中的主动性和被动性;对其做出的努力和进步给予肯定,增强训练信心。
3.3.3构建多方交流平台以促进机器人辅助训练的推广及应用 研究[35]指出,在机器人辅助训练中感知益处较大的患者更愿意向同伴推荐机器人辅助康复。同伴支持已被证实有益于SCI患者及其照顾者的身心健康[36]。构建机器人辅助康复多方交流平台,一方面通过同伴交流提高机器人辅助训练益处的传播;另一方面通过同伴间分享经验和技巧以促进机器人辅助训练更顺利地开展。此外,机器人辅助训练宣传小组、技术指导小组及康复师可将规范操作的视频、操作流程和参数设定等上传至该平台中,保证患者训练的规范性以提高训练效果,设置讨论区接收患者的意见,了解其需求并及时线上解答其困惑。
3.4本研究的局限性以及展望 本文纳入大部分研究的样本量较少,可能放大阳性结果;没有检索未发表的文献,部分结局指标存在发表偏倚。纳入的文献质量多为B级,研究设计不够严谨,存在方法学异质性。测评时间不统一,可能存在结果偏倚。今后的研究可开展大样本,多中心的研究;机器人辅助训练多在医院和康复中心进行,建议今后深入社区家庭,为SCI患者提供更多的福利。
综上所述,机器人辅助训练可提高患者的步行距离和日常生活能力,增强双下肢运动功能、步行灵活性及起立行走能力,但在提高患者步行速度和平衡能力的效果尚不确定,仍需开展更多高质量研究予以验证。护理人员需不断加强对机器人等人工智能的学习和培训,推动人工智能在护理领域的发展。