基于TRIZ理论的混联式多维振动时效机器人的设计
2022-12-21王智慧王成军邾志伟
王智慧,王成军,邾志伟
(安徽理工大学 a.机械工程学院;b.人工智能学院,安徽 淮南 232001)
0 引言
振动时效是指通过对铸件施加交变载荷,使铸件内部的残余应力逐渐释放出来的一种处理方法。自20世纪80年代以来,因振动时效费用低、污染环境小的优点,逐步代替热处理消除内应力的时效处理。目前的振动时效装置主要以激振器为主,通过人工将其固定在构件表面可以有效消除小型铸件的残余应力,却无法满足结构复杂的大型铸件的激振作业需求。
TRIZ理论是一种能够帮助使用者快速找到问题核心且提供解决问题的可行办法的系统体系[1-2]。陈锦豪[3]对进气管道调节机构进行创新设计过程中,基于TRIZ理论引入反向设计流程,使设计过程更加具体和完善。刘静[4]基于TRIZ理论对马桶监测装置进行创新设计,解决马桶水资源浪费等问题。本文基于TRIZ理论的创新思维研制一种适应性强、激振频率高、安全可靠,可以适用于机械设备制造的多维振动时效机器人,减小和消除机械设备结构件焊接、铸造或机械加工过程中产生的残余应力,提高机械设备结构强度和尺寸精度;对实现装配的互换性,使机械设备制造工艺稳定、可控,降低废品率和制造成本具有现实意义。
1 振动时效装置系统分析
1.1 问题描述
传统的振动时效装置多采用单自由度惯性激振器,通过卡具固定在工件上完成一维激振作业,结构简单、操控方便,对小型激振任务具有良好的处理效果。对于中大型、结构复杂或焊缝多的构件,残余应力呈空间三维分布,传统的振动时效装置难以满足消除应力的实际需要,其振动模式单一,不能同时实现多自由度激振,振动时效处理效果较差。且现有振动时效装置仍需要人工固定安装和拆除,不仅劳动强度大,而且工作效率低。
1.2 九屏幕分析法
九屏幕法是一种综合考虑问题的方法,从时间空间等多维度对问题进行全面系统的分析。建立当前系统为振动时效装置的九屏幕分析法,如图1所示。
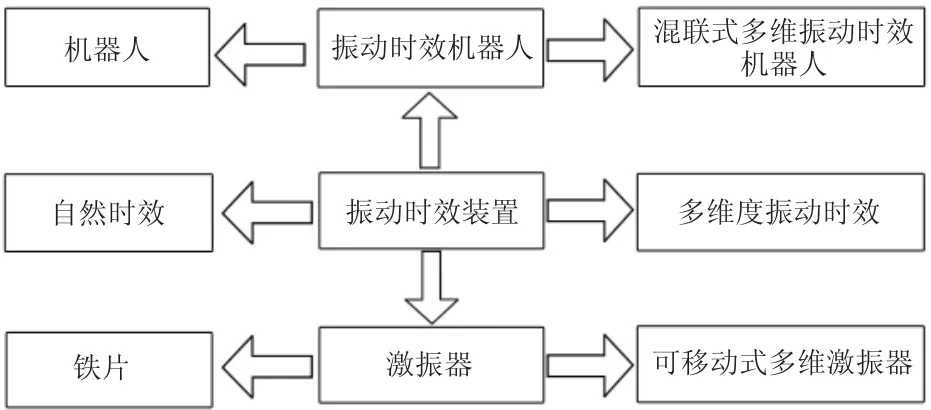
图1 九屏幕分析法
通过九屏幕分析,当前系统是振动时效装置,超系统是振动时效机器人,从而解决人工去固定安装和卸除装置,大大降低工人的劳动强度;当前系统的未来是多维振动时效,有效解决目前振动时效装置维数单一且对大型结构复杂或焊缝多的构件上的应力难以消除的问题。子系统的未来是可移动式激振器,可有效解决大型结构复杂或焊缝多的构件上的残余应力呈空间三维分布的问题。超系统的未来是混联式多维振动时效机器人,使振动时效装置更加智能化,既能解决大型结构复杂或焊缝多的构件上的应力难以消除的问题,又能解决大型结构复杂或焊缝多的构件上的残余应力呈空间三维分布的问题。
1.3 因果轴分析
因果轴分析是对事物发生的结果与其产生原因之间的关系进行分析的一种方法,通过研究其产生的根本原因,从而找到相应的解决办法[5-6]。根据目前激振装置存在的问题建立振动时效装置的因果轴分析图,如图2所示。
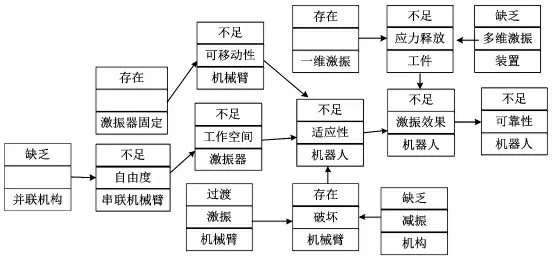
图2 振动时效机器人的因果分析图
通过因果轴分析图得到现阶段振动时效处理效率低的原因:1)目前激振装置为一维激振,激振过程中自由度单一,对于结构复杂的铸件无法多个方向消除残余应力;2)缺乏并联机构,机器人在铸件和焊接件的激振过程中,许多工作都需要人工完成,费时费力,自动化程度低;3)在已有机械臂夹持激振器的振动时效装置中,机械臂移动性不足,最终激振装置的激振效果不足;4)在已有机械臂夹持激振器的振动时效装置中,用机械臂夹持激振器过程中,机械臂缺乏减振机构,导致机械臂遭受破坏。
以上问题导致目前的振动时效装置激振效果不足,自动化程度较低。
2 问题解决
2.1 技术矛盾
通过九屏幕分析与因果轴分析目前振动时效装置需要解决的问题是自动化程度较低。要改善的标准工程参数分别为适用性及多样性和自动化程度,而相应恶化的参数为运动物体的质量和设备的复杂性。建立相应的矛盾关系矩阵如表1所示。

表1 矛盾关系矩阵
根据矛盾关系矩阵得到6条发明原理,根据1分割原理:把物体分成相互独立的部分与15动态化原理。得到的解决方案为将振动时效装置分成移动部分与激振部分。根据10预先作用原理:对部分物体施加必要改变与16未达到或过度的作用原理。得到的解决方案为对缺乏减振机构的机械臂施加改变增加一个减振机构及隔振器。根据11预先防范原理:事先采取应急处理,补偿物体相对低的可靠性,得到的解决方案与10预先作用原理得到的方案一致,即增加一个隔振器。
2.2 物-场模型
1)问题模型的建立。由九屏幕分析图和因果分析图可知:①机器人在铸件和焊接件的激振过程中,许多工作都需要人工完成,费时费力,自动化程度低;②单自由度激振器激振过程中,不能多方向上进行激振处理;③在已有机械臂夹持激振器的振动时效装置中,机械臂移动性不足,最终激振装置的激振效果不足。
2)解决方案。对于问题①,采用一般解法3,增加第三种物质来阻止有害作用。采用增加多机械臂的方法来替代人工操作激振器,提高自动化程度,如图3所示,可得解决方案:增加多个机械臂。
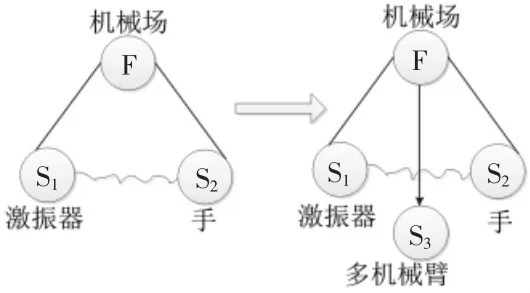
图3 问题①物场模型示意图
针对问题②,采用一般解法6,即引入物质S3和另一种场F2来提高有用效应,如图4所示。
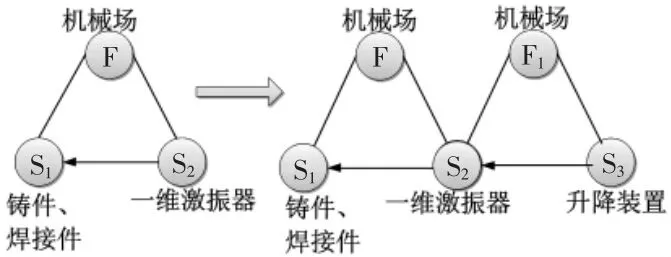
图4 问题②物场模型示意图
将原有的一维激振器激振中引入升降装置,解决了原系统激振方向单一和激振维数单一的问题,工作方式发生变化,从原有的一维激振变为多维激振,提高了激振效率,节约了成本,且机器人具有适用性及多样性,满足市场需求。
针对问题③,采用一般解法3,增加第三种物质来阻止有害作用。通过在机械手上增加移动装置,例如将机械臂安装在滑动导轨上,使机械臂具有移动性能,如图5所示。
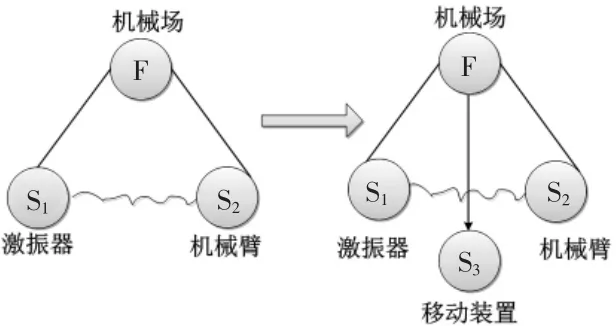
图5 问题③物场模型示意图
3 混联式多维振动时效机器人的设计
对以上提出的解决方案进行归纳总结,提出一种混联式多维振动时效机器人的设计,该机器人由吊支架、轨道移动装置、升降装置、左机械臂、右机械臂、隔振器和激振器组成,如图6所示。
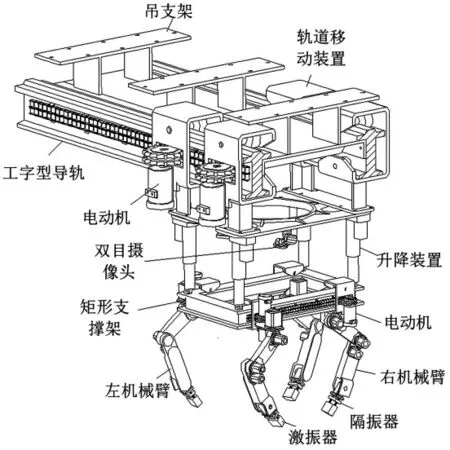
图6 混联式振动时效机器人的设计
轨道移动装置通过哑铃型导向轮安装在工字型导轨上,升降装置中连板与轨道移动装置相连,通过轨道电动机驱动链轮实现轨道移动装置在工字型导轨上的移动,从而带动升降装置的前后移动;左右调姿装置通过矩形支撑架与升降装置相连,同样左右机械臂通过电动机驱动可在矩形支撑架上的导轨上实现左右移动。从机构学角度而言,机械臂具有2平移、2转动共4个自由度,因而安装在左机械臂、右机械臂末端的激振器为具有3个平移、3个转动共6个运动自由度,且具有一个垂直方向移动和水平方向移动共2个冗余自由度,整个混联式多维振动时效机器人具有3平移、3转动共6个自由度。为了防止激振器对机械臂的影响,在机械臂与激振器中间设置隔振器。
该振动时效机器人工作原理:双目摄像头先根据被振动时效处理的目标物的制造工序情况,确定需要执行振动时效处理的工艺参数、夹具夹持的具体构件及部位,将目标物通过橡胶弹簧支撑在地面或工作台上。振动时效处理作业前,通过调节轨道移动装置实现远距离直线调节,其次通过升降装置实现上下调节,最后通过左右调姿装置使激振器到达准确位置,并通过夹具将激振器固定在目标物的指定位置,启动激振器对目标物进行振动时效处理。振动时效处理完成后,松开夹具,通过升降调姿装置或左右机械臂移开激振器,等待下一次执行振动时效处理任务的指令。在执行振动时效处理任务过程中,对目标物的位置及姿态的识别主要依赖双目摄像头完成。
4 结论
基于TRIZ理论的九屏幕分析、因果轴分析,分析目前振动时效装置存在激振效果不足、自动化程度较低等问题;根据分析存在的问题,建立技术矛盾矩阵与物场模型,提出混联式多维振动时效机器人的设计。机器人能够实现3平移、3转动共6个自由度方向对复杂构件进行振动时效处理任务,从而减小和消除机械设备结构件残余应力,避免结构变形或形成裂纹;能提高机械设备的结构强度和尺寸精度,减轻生产线上工人的劳动强度,克服现有技术的缺陷。
