照度稳定的LED工作台设计
2022-12-21李志明李春鹏
李志明,李春鹏
(南京铁道职业技术学院,江苏南京,210031)
1 系统目标要求
本工作台能够实现在不同光强下快速响应并稳定校准自身亮度的功能,使工作台大部分区域保持稳定照度和均匀度。系统通过键盘下达指令,单片机通过光照传感器获取当前点的照度,随即使用PID 算法进行PWΜ 调光,使得灯光快速进行变化以响应环境要求,保持指定范围光照均匀稳定。本装置能在环境光快速变化时急速响应(光照度变化±10%),在环境光缓慢变化时精确校准(±5%)。系统要求主要有两个方面,一方面是光照的均匀性,一方面是光照稳定性,即光照抗干扰能力。以下文章主要从这两方面进行阐述。
2 光照的均匀性设计
首先进行不控制的均匀性设计,目的是在不进行任何控制的情况下,使光照度较为均匀照射在工作台上。发光二极管(LED,LightEmittingDiode)作为第四代照明光源,具有节能、环保、体积小、抗震性好及高显色性等优点[1],目前已广泛应用于特种照明领域,比如飞机场跑道警戒灯、手术台无影灯等等。本文就LED 光源单点光源、环形阵列光源、方形阵列光源光学特性进行仿真模拟、比较分析。
■2.1 单点LED 光源光学特性与建模
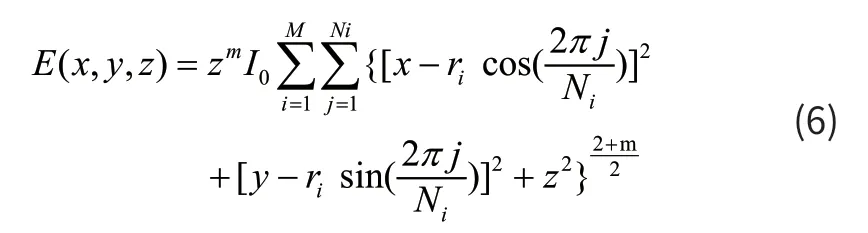
单点LED 光源光强分布特性有如下公式[3]:

其中,θ是发光角度,I0是发光角角θ=0 时的光强。m 是由制造工艺确定,光源生产厂家出厂给定该参数。LED光源理论上可近似为点光源,其光场照度为:

其中,r为光源到工作台之间的距离。将(2)式转换为直角坐标系:

式中,(X,Y)为LED 光源在工作台平面上的投影坐标,z为LED 光源到工作台之间的垂直距离。m为光源特性参数,由生产厂家给定。仿真工作台为1m2,高度为0.5m,图1是单点LED 光源放置在工作台中心点处的照度分布登高曲线和三维曲面图。

图1 单点LED 光源照度分布图
可以看到,光强随着离中心距离越远越弱,这跟日常生活经验一致。很明显,单点光源不能很好地控制工作台上的光强均匀度。下面就进行环形和方形LED 点阵的光强的仿真。依据国际照明协会规定,也就是本工作台指标要求:

根据式(4)计算得到光斑半径R,根据简单的几何知识可得发光角度α:

R为光斑半径,h为光源到工作台得垂直高度,rN环形阵列得最大半径或者为方形边长一半。该公式可以计算光强均匀度得范围大小。
■2.2 环形和方形LED 点阵的光学特性与建模
目前常见得LED 点阵为环形或者方形,下面就环形和方形分别进行光学特性仿真一边选择更利于工作台的LED点阵结构。对于环形结构,光强公式[4]如下:
其中,M是环形阵列的环数,ri是第i环半径,Ni是第i环的LED 光源数。为了简单观察比对比,我们假定工作台中心为原点,环形半径为0.25m,点光源分别放置在极坐标(0.25,0°),(0.25,90°),(0.25,180°),(0.25,270°)。仿真结果如图2 所示。
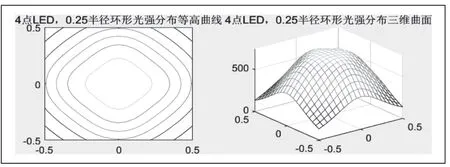
图2 环形阵列LED 光源照度分布图
对于方形结构,光强公式[4]如下:

其中,假定N为偶数,d为点光源之间距离,Ni是第i环的LED 光源数。为了跟环形结构光强比较,方形结构LED 灯阵也假定4 个LED 点光源。同样,设置工作台中心为原点,4 个LED 点阵分别放置在(0.25,0.25)、(-0.25,-0.25)、(-0.25,0.25)、(0.25,-0.25)。仿真结果如图3 所示。
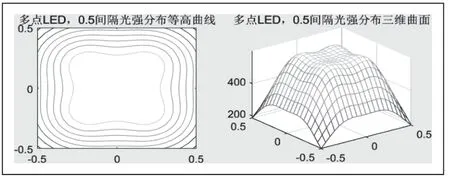
图3 方形阵列LED 光源照度分布图
在相同的LED 光源,即参数m,I0 一致,高度一定的情况下,很明显,方形结构的光斑半径比环形结构更大,照射范围更广,但是中心照度较小。
笔者为了选择合适的点阵,在其他条件都不变的情况下继续增大LED 的点阵数目,分别8 点和16 点LED 点阵光源照度分布如图4 所示。

图4 方形阵列8 点和16 点LED 点阵光源照度分布图
可以看出,在1m×1m 的工作台上,8 点均匀分布的LED 点阵,照度均匀性更好,并且接近于圆形点阵分布。16点阵由于过密,光源照度均匀度出现了严重分区现象,当然可以通过调整m的值进行控制。事实上,随着LED点数增加,方阵的光斑会趋于圆形[4]。并且,有研究表明LED 方形阵列光斑的照度均匀度随目标距离、随m 值以及随灯芯间距的变化规律都是非线性增大或者减小[4]。这里不再重复。
由上根据照度均匀性要求,LED 点阵方形结构的照度均匀度比环形结构更好一些,因此系统设计选择光斑范围更大的8 点阵的方形结构。在确定了基本LED 点阵结构之后,为了控制干扰光源对工作台的干扰系统使用了传统的PID控制。现在简要介绍PID 原理和在本系统中的使用。
3 PID 控制及应用
系统控制干扰对工作台光照均匀度的影响不能得到一个精确的数学模型,对控制结构和参数目前也没有深入研究,因此系统使用了PID 控制技术,是系统能根据外部光源的干扰而实时控制LED 灯阵,保持系统的照度均匀性。
系统总体控制如图5 所示,由被控制对象光照均匀度和PID 控制器组成。
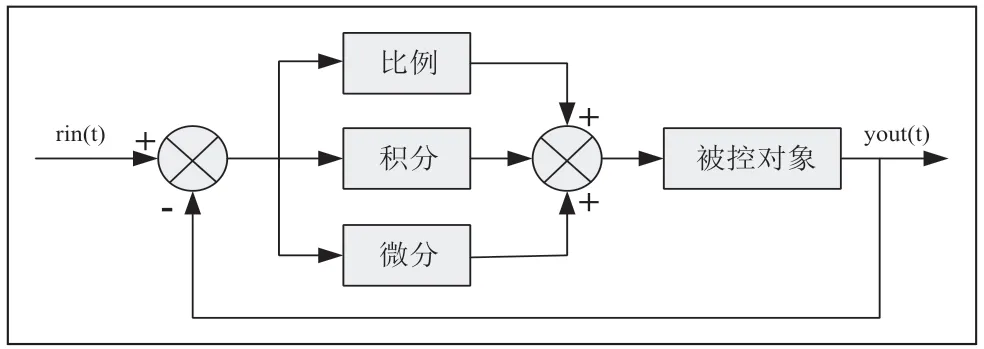
图5 PID 控制系统原理框图
PID 控制器是一种线性控制器,它根据给定值rin(t)与实际输出值yout(t)构成控制偏差,即:

PID 的控制规律为:

或写成传递函数的形式为:

式中,Kp为比例系数;Ti为积分时间常数;TD为微分时间常数,积分系数,微分系数计算公式如下:

简单说来,PID 控制各校正环节的作用有详细书籍介绍,这里仅仅给出基本结论,比例环节能快速减少误差,但是不能消除静态偏差,容易引起系统震荡。因此需要引入积分环节消除静态偏差。微分环节主要是减小振荡克服偏差。
调整PID 参数的方法有很多,这里仅仅笔者经验方法。首先切除积分和微分的影响,即只用比例进行调整,不断调整比例系数至系统平稳震荡4 到5 个估算周期。估算出周期值T,此时取值比例系数Kp=1.7T,Ki=0.5T,Kd=0.125T。多数情况下,此时系统应该比较稳定,如果还没有达到理想状态,在此基础上微调参数即可。
4 系统整体设计
■4.1 系统整体设计
本系统主要由STΜ32F103ZET6 单片机系统板、电源模块、LTC3780 稳压电源模块、ULN2003 驱动器、4×4矩阵键盘、LCD 显示屏、BH1750FVI 光照传感器、LED 灯带等部分组成。使用者矩阵键盘发出自动调试信号,通过BH1750FVI 光照传感器检测环境光变化并向单片机发送数据,单片机开始运算,通过PID 算法得出结果并以PWΜ 形式输出电压控制LED 点阵光照,最终使得工作台光照按照指令进行工作。

图6 系统框架图
■4.2 硬件设计
控制单元选用当前流行的STΜ32F103ZET6,这款单片机具有72ΜHzCPU 的速度和高达1ΜB 的闪存,具有丰富的外围设备如CAN 总线接口、USB 全速接口、串口、I2C总线、DΜA 控制器、多个12 位AD 转换器和DA 转换器等等,能满足各种应用场景。STΜ32 系列ARΜ Cortex-Μ3 32位闪存微控制器工作时具有低功率、低电压,并结合了实时功能的极佳性能。能实时采集光照传感器的照度变化,并能快速通过PID 调整工作台点阵光源的亮度。因为系统设计接口较多,因此对电源要求也很高,要求稳定输出3.3V、5V 和6V 电压,系统设计电源模块如图7 所示。
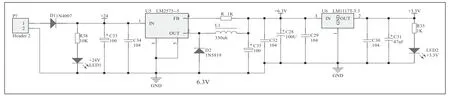
图7 系统电源设计模块
光照传感器:采用BH1750FVI 芯片,工作电压3~5V,传感器内置16bitAD 转换器,直接数字输出,省略复杂的计算,省略标定,不区分环境光源,接近于视觉灵敏度的分光特性,可对广泛的亮度进行1LUX 的高精度测定。
■4.3 核心电路设计
BH1750FVI 芯片核心电路设计,光照从PD 进入传感器,经过运放放大,到ADC,最后经I2C 总线传送给控制器。
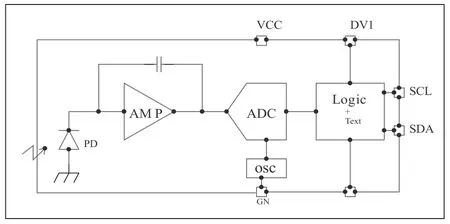
图8 BH1750FVI 电路图
■4.4 系统总体工作流程
系统上电后开始工作,ΜCU 通过键盘扫描获取用户输入指令。用户输入手工调整亮度指令时,系统通过获取可调旋钮的电压来控制LED 点阵亮度。如果用户开启系统抗干扰模式,则系统实时通过工作台上的光照传感器获取当前强光的来源和方向,通过PID 控制LED 点阵的亮度来调整工作台的光照均匀度。以达到工作台照度均匀的要求。
5 作品成效总结分析
■5.1 系统测试性能指标
表1 数据是当环境光缓慢变化,系统自动校准时。纸面中心照度变化小于5%。当环境光突变,系统自动校准时。纸面中心照度变化为小于10%。当环境光增强至工作台熄灭,纸面中心照度变化小于10%,符合系统要求。
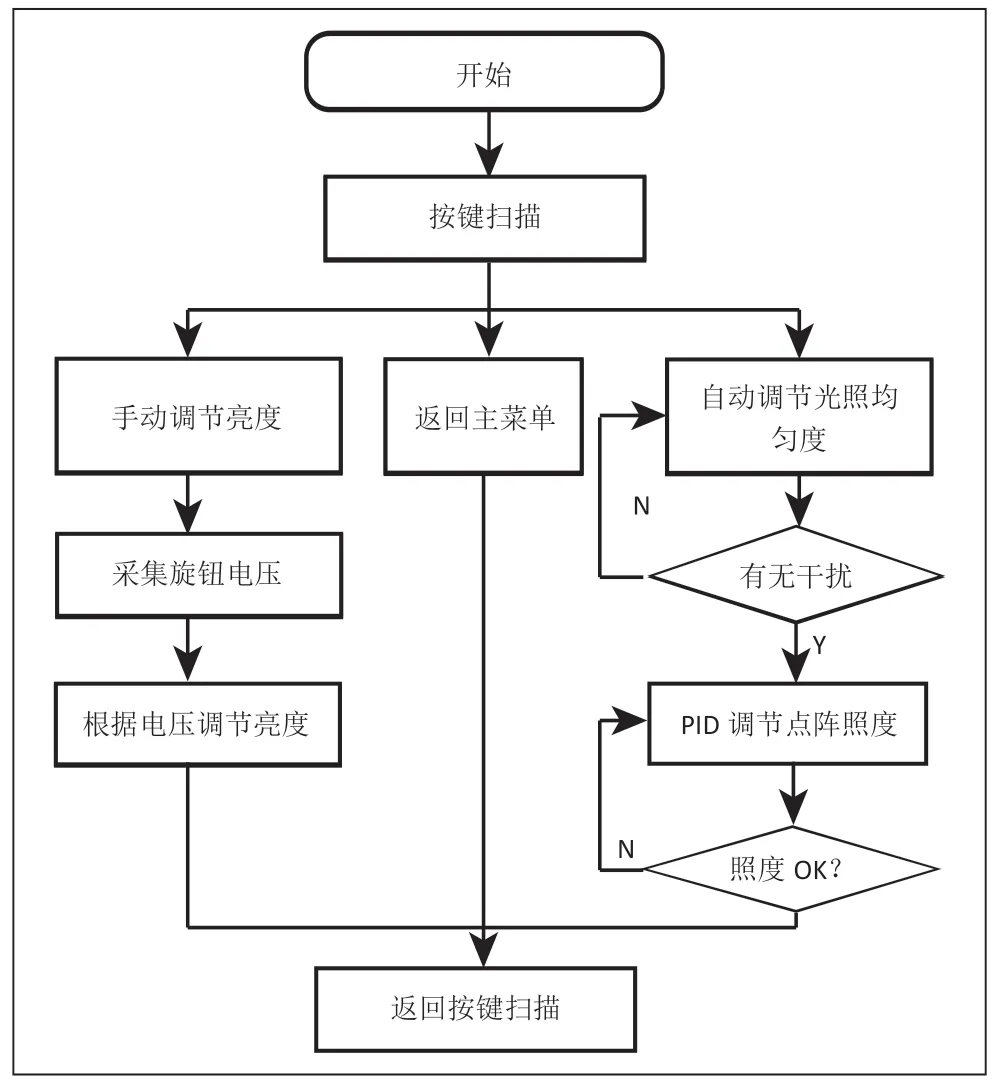
图9 系统总体工作流程
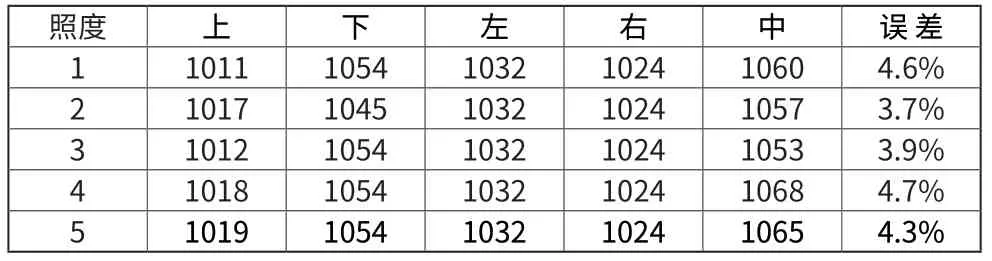
表1 光照均匀测试数据
■5.2 创新特色总结展望
本设计使用BH1750FVI 光照传感器进行数据采集,用STΜ32F103ZET6 进行数据处理并使用六路PID 算法及PWΜ 控制LED 灯珠光照程度;系统机械结构搭建合理,充分保证了系统总体结构的稳定,具备较好的抗干扰能力,实现了较快的校准速度及较高的精准度。
本设计控制光照均匀度应用在各个特殊领域,如手术台无影灯,机场跑道的警戒灯,用于治疗婴儿黄疸LED 治疗箱等等。后期在结构稳定性、光学原理、机械结构灯方面进行深入研究,争取更好作品应用于生活生产的各个领域。
