基于STM32的智能消毒门垫控制系统设计
2022-12-21潘建西
潘建西
(成都东软学院 信息与软件工程系,四川成都,611844)
0 引言
随着我国人工智能技术的日新月异,人们在生活中对智慧家居的需求越来越高。对于智慧家居之一的家用消毒设备而言,其应用也越来越广泛。因此,研究家用智能消毒设备具有良好的经济价值。
近年来对于智能家用消毒设备而言,许多高校和企业都进行了大量的研究。例如:文献[1]采用树莓派主板和传感器相结合的方式,开发了一款家用消毒机器人,达到了良好的消毒效果;文献[2]采用形态分析法设计了集移动、导航、驱动、存储以及喷洒等功能于一体的简易消毒家用机器人,该作品实现了消毒机器人功能多样化的目标;文献[3]采用将消毒模块融入空调的方式,开发了室内空调智能消毒设备提升了消毒的便捷性。上述智能消毒设备功能比较完善,在一定程度上均达到了比较好的家用消毒效果。然而实际上,室内相当一部分细菌、病毒从由人们从室外带回的,且当人们从室外回到室内时,由于行动轨迹的随机性,会导致细菌分布呈复杂的状态,故室内的消毒设备进行针对性消毒存在一定的困难,且容易导致能耗增加等问题。因此,将细菌消灭于门口,有利于减轻室内有害菌的分布复杂性,从而进一步提升室内消毒设备的工作效率、节约能耗。而实现这个目标的方法是开发智能消毒门垫,让人们从室外进入室内时,便完成消毒过程,达到减少带入室内的有害细菌,清洁室内环境的目的。
1 控制系统的布局
智能消毒门垫的设计方法,采用产品设计原理中的功能与结构相统一的方法,即先拟定系统的基本功能,再结合功能确定对应的模块,最后将模块整合构成完整的控制系统[4]。具体的设计流程,如图1 所示。

图1 控制系统设计流程
根据上述流程,本文对于智能消毒门垫的基本功能设定包括:消杀、应力感应、时间控制、显示、充电等。各项功能对应的模块,如表1 所示。

表1 智能门垫的功能与模块
由表1 所示的各系统模块,需要一个主控板将各模块整合成一个整体,并实现系统的动作指令控制。由于就本系统而言,需要控制的指令较少,结构相对简单,只需要确保基本的信息传输和分析、感应精度等参数性能即可。因此,系统的主控板采用STΜ32 单片机[6]。该控制系统的基本布局如图2 所示。
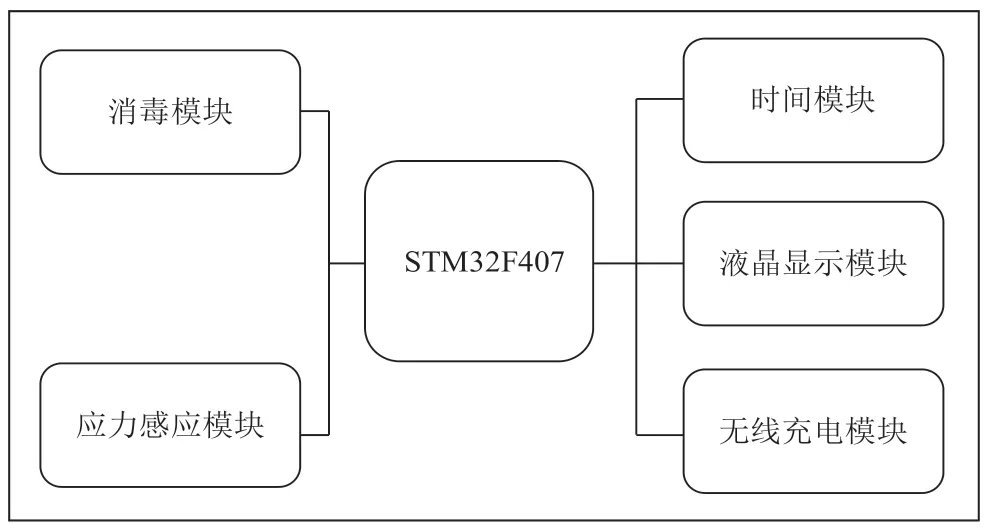
图2 控制系统的布局
2 控制系统的硬件设计
对于该智能消毒门垫而言,其主要的工作步骤为:(1)应力感应。将门垫放置于入户门口,当人从室外进入室内时,脚会对门垫施加载荷。此时,门垫的应力感应模块会感应到力的作用,并开始进行信号转换;(2)消毒模块动作。信号传至主控时,控制器发出指令,消毒模块开始启动。与此同时,通过程序编译,将消毒时间控制在一定时域内,当时间达到规定的阈值,消毒过程停止;(3)液晶显示屏显示应力感应情况、消毒进度、完成率、电量剩余等参数。从应力感应到消毒过程结束整个环节,用户均能够通过液晶显示屏接收适时的消杀信息,作为判定下一步动作的依据。因此,在整个模块的设计中,应力感应精度、消毒类型、液晶显示以及无线充电方式等硬件设计,对于最终的消杀效果、门垫的经济性、舒适度等参数有关键影响。
■2.1 STM32 单片机类型的选择
在系统主控板的类型选择中,考虑到本系统的传感信号比较单一,仅为应力传感器感应参数的传输与信号转换。故主控板确定为STΜ32F407 单片机[7]。该单片机具有能耗较低的特点,且能够高效地实现信号的数模转换、处理分析等操作,比较适应于本课题的智能消毒门垫系统,该主控板的部分主要参数如表2 所示。

表2 STM32F407主要性能参数
■2.2 消毒模块的设计
在室内家居消毒模块的设计中,目前应用比较广泛的消毒方法包括:紫外线消毒和消毒液消毒[8~9]。因此,本文在消毒模块的设计中,也从这两种消毒方式之间进行选择。若智能消毒门垫采用消毒液消毒的方式,则消毒模块需要设计消毒液存储机构、喷洒装置、消毒液容量检测装置以及添加接口。对于厚度较薄、实现简单消杀功能的门垫而言,需要设计的结构较多,系统比较复杂,且这些设计会导致门垫的厚度和重量增加较多,经济性不佳。若采用紫外线消毒的方式,则只需要布置一个小型的紫外线灯,便能够实现该功能,该设计方案的结构比较简单,对门垫的厚度、重量影响不大,且紫外线杀毒的方式不会造成环境污染,安全性较高。综上所述,本文在消毒模块的设计中,采用紫外线灯作为消毒模式。紫外线灯管电路设计如图3 所示。
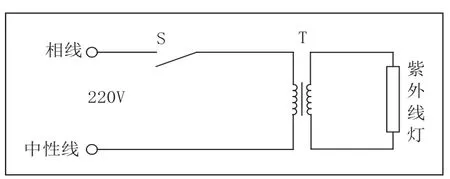
图3 紫外线灯管电路设计
■2.3 应力传感模块的设计
应力传感模块主要是设置应力传感器来感应人踩在门垫上的压力信号。该模块的设计中,主要考虑的因素是人进门时,脚作用在门垫上对其施加的载荷大小,由此作为传感器型号选择的依据。因此,选择量程范围内的应力传感器是模块设计的关键。同时,需要考虑传感器的检测精度,以避免主控未接收到信号,而不发出消毒的动作指令。本文根据调研情况,以平均体重为60~80kg 的人为门垫使用对象,选择高精度的圆形压力传感器作为该模块的基本部件。该传感器的直径较小,且厚度比较薄,与门垫扁平的特点相适应,不会过度增加门垫的设计厚度。该传感器的主要参数如表3 所示。

表3 应力传感器主要参数
■2.4 液晶显示模块的设计
本课题中,液晶显示模块采用TFT-LCD 模块[10]。该显示模块为2.8 寸,显示色为16 位。能够满足人机交互的需求。同时,除系统的自动控制性能外,若用户需要临时停止消杀或调整时间等情况下,该显示模块的触摸屏功能便能够实现用户的手动调节和设置。即从人机交互的方面来看,该液晶显示模块是比较适应的。其模块接口如图4 所示。
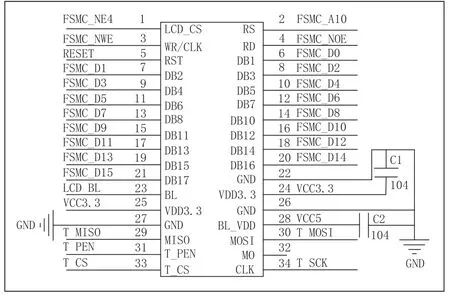
图4 液晶显示模块接口
■2.5 蜂鸣器的设计
在控制系统中,当智能门垫开始进行消杀以及消杀过程结束时,可以采用蜂鸣器来实现对用户的信息提示。因此对于蜂鸣器模块的设计而言,由于涉及到用户对每个环节的准确判断。其电路是否稳定和可靠是设计的基本依据。本课题中,选择的STΜ32 主控板并不能够直接对蜂鸣器进行驱动,而是需要通过先连接到三极管上,再经过扩流的方式达到驱动蜂鸣器的目的。所以从本质上来说,三极管作为开关对蜂鸣器进行启闭。当高电平被输出时,三极管便会导通,此时蜂鸣器便发出消杀启动或结束的提示音。而当输出为低电平时,三极管关断,蜂鸣器动作停止。蜂鸣器模块的驱动电路如图5 所示。
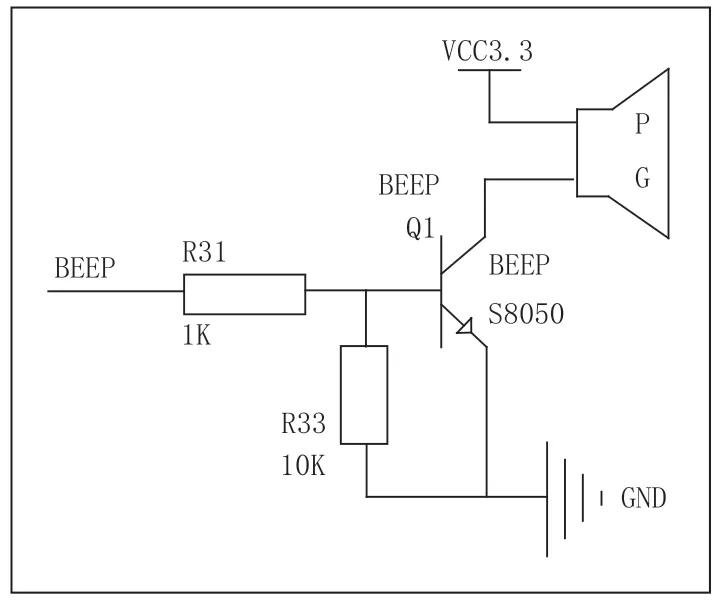
图5 蜂鸣器模块驱动电路
3 控制系统的软件设计
完成控制系统的硬件搭建后,下一步的操作,就是进行控制系统的软件设计。以确保控制系统能够按照指令运行。该环节的主要操作步骤为:
(1)构建系统运行的控制流程图。根据前边所述的系统运行原理,完成系统运行的流程图,为后续程序的编写奠定基础[11]。控制系统的运行流程如图6 所示。
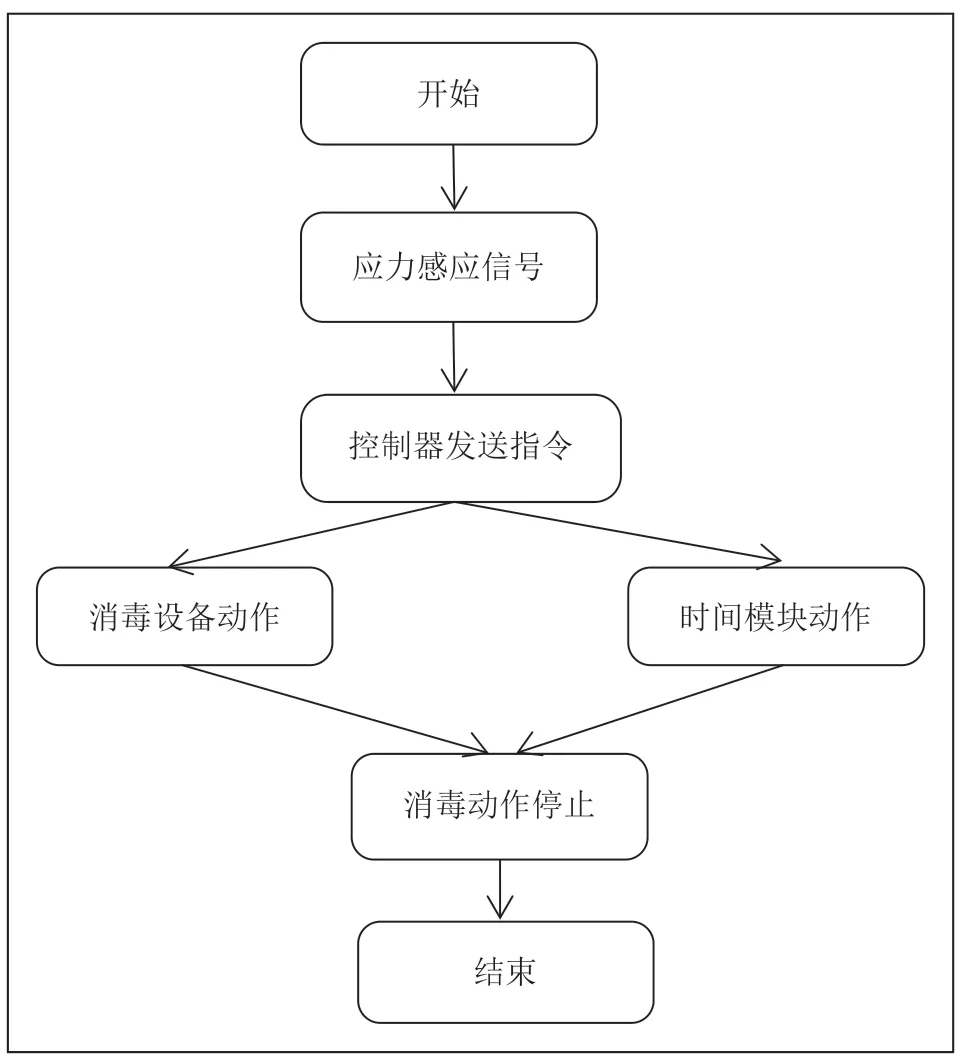
图6 控制系统工作流程
(2)编写运行程序。根据运行流程、需要执行的动作、动作的时间、数据显示等情况结合搭建的硬件进行函数的编写和存储。限于篇幅,以数据的显示为例,部分代码为:
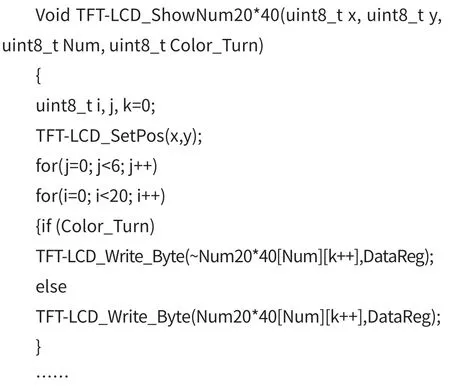
(3)实现系统配置。该环节由STΜ32Cube ΜX 实现系统的配置[12]。主要操作包括:时钟模块设置为晶振、完成GPIO 配置以及函数库的调用等。
通过上述三个步骤的操作,编写的代码便烧录至主控板芯片中[13-14],即控制系统可以按照指令进行动作,以达到实现预先设置功能的效果。
4 性能测试
当智能消毒门垫控制系统的硬件和软件设计完成后,需要对系统进行性能测试,继而判定该系统的设计是否合理。考虑到该消毒门垫包含的模块较少,功能较为简单。故系统的测试主要围绕几个关键模块进行。由此,本文制作了简易的系统模型,并对部分模块的工作状况进行了测试,具体的测试结果如表4 所示。

表4 性能测试
由表4 所示的性能测试结果可知,整体而言,该系统各个模块的工作状况比较良好。整个系统能够按照控制的指令正常动作,且各模块的响应速度较快,精度较高,对于正常的家庭消毒使用能够比较良好的满足。综上所述,该智能消毒门垫控制系统的结构布局比较合理,达到了预期的设计要求。
5 结论
在智能消毒门垫的设计中,结合功能与结构相统一的设计原则,确定了基本的控制系统模块。以STΜ32 为主控板,将各模块整合成了一个完整的系统。通过对系统的硬件、软件设计、性能测试等阶段,验证了该门垫具有良好的消毒效果,同时也佐证了该控制系统结构设计的合理性。下一步工作,将对该产品开展进一步的优化设计,实现其性能、经济性等方面的进一步提升。
