降雨诱发滑坡倾斜变形试验研究
2022-12-20刘汉东刘静静陈家兴
刘汉东, 刘静静, 陈家兴
(1.华北水利水电大学 岩土力学与水工结构研究院,河南 郑州 450046;2.河南省岩土力学与结构工程重点实验室,河南 郑州 450046)
中国是世界上滑坡灾害最严重的国家之一,且滑坡规模大、机制复杂、危害大、防治难度高,造成了巨大的经济损失和人员伤亡[1]。因此,正确揭示滑坡变形规律,准确识别滑坡的演化过程,建立合理的滑坡预警指标是防灾减灾的重要手段[2]。
降雨是诱发滑坡失稳的主要因素之一[3]。国内外学者从降雨量、降雨强度、降雨持时、降雨类型、滑体材料特征等多个角度研究了降雨与滑坡的关系[4-6]。CAINE N[7]对降雨强度-持续时间与浅层滑坡和碎屑流的关系开展了研究,提出了降雨强度-持时指数关系,并将其作为降雨诱发浅层滑坡失稳的降雨阈值。GLADE T[8]通过对新西兰北岛3个滑坡区降雨与滑坡关系的研究,提出了采用日降雨量、前期日降雨量、土体初始含水状态3个模型来确定降雨临界值。降雨条件下土体初始孔隙率会对滑坡失稳后滑移速率产生较大的影响,相同的降雨条件下,孔隙率为0.5的砂土由于降雨而液化后,滑动速度瞬间达到1 m/s,而孔隙率为0.4的砂土则以2 mm/s的速度向前滑动[9]。
降雨强度-持续时间模型(I-D)是目前应用的主要降雨型滑坡预警模型,基于最大降雨强度和累计降雨量这两个降雨参数,可以计算降雨阈值,而可靠的降雨阈值是建立准确的滑坡灾害预警的关键[10]。BRUNETTI M T等[11]通过对意大利753个诱发滑坡失稳的降雨事件进行分析,建立了基于降雨强度-持时关系的降雨阈值。此外,关于降雨诱发滑坡的机理也得到深入的研究。KEEFER D K等[12]在加州旧金山湾地区开发了一个实时监测系统,并成功地预测了重大山体滑坡事件。该系统是基于降雨与滑坡破坏之间的实证和理论关系、区域性滑坡雨量计的实时监测以及国家气象局的降雨预报开发的。然而,由于缺乏长期、准确的滑坡事件统计与相应的降雨数据,很难有效分析一个独立的滑坡事件与降雨事件之间的相关性,导致单一的降雨阈值预警方法不可靠[13-14]。
滑坡监测预警是目前滑坡灾害管理的有效替代方案,而选取有效的监测指标、提高滑坡预测的可信度是其中的重难点[15]。刘汉东等[16]对滑坡预测预报方法的进展进行了系统分析,对非线性理论的特点及其在滑坡预测中的作用和意义进行了阐述,基于对复杂地质体的认识,提出了定性、定量综合集成的方法以及新的研究思路与发展方向。典型的滑坡预警系统是基于坡面的位移监测[17-19]进行研究。SAITO M[20]首先提出了基于蠕变理论预测滑坡失稳时间的方法,通过函数拟合建立位移曲线函数,进而根据其位移特性进行预测。后来,国内外学者将表面位移、位移速率、位移加速度等多个指标与滑坡变形破坏的力学机制相结合而进行准确预测[21-25]。然而,大多数传统传感器(包括位移计)的安装和维护都具有复杂性,不仅增加了成本,而且限制了这些系统的应用。
随着微电子计算机和通信等技术的快速发展,远程自动化实时采集滑坡的变形信息基本得到实现。刘汉东等[26]在滑坡稳定性分析和发展趋势判别理论的基础上,布设了表观及深部变形、渗压、降雨等监测项目,建立了物联网自动化监测方案和预警系统,提出了滑坡多因素综合预报理论体系并构建了滑坡预测预报模型。目前,基于物联网的监测预警模型广泛应用于滑坡的实时监测,采用相对位移传感技术和全球移动通信系统(Global System for Mobile Communications,GSM)技术,可以对滑坡地表裂缝进行远程实时监测,保证了监测系统的可靠性和有效性[27]。
王妙茜等[28]提出了基于滑坡破坏时的倾角变化来发布预警信息的监测方法,通过倾角与位移及速率等预报参数的对比研究发现,基于倾角变化的预警方法更加实用有效。杨贺等[29]利用微芯桩监测四川省雅安市泸定县黄草坪滑坡破坏过程中的倾角变化,分析了滑坡失稳过程的倾角发展特征。UCHIMURA T等[30-31]利用角度传感器MEMS模块监测滑坡变形,并通过无线网络传输实时数据,根据倾角传感器和体积含水量传感器所得数据发出预警标准,建议以0.01 (°)/h的倾斜率变化发出预防,以0.1 (°)/h的倾斜率变化发出预警。由于倾角传感器成本低、安装简单,其已在一系列现场试验和模型试验中得到应用。研究表明,基于滑坡破坏时的倾角变化来发布预警信息的监测方法相比基于位移及速率的监测方法更加实用有效[28]。
本文采用地质力学模型试验方法,根据渑池县槐扒滑坡工程地质勘察报告和现场调查情况,建立了滑坡坡角为25°的试验模型。在降雨诱发滑坡破坏的条件下,利用HCA726S倾角传感器、微型土压力传感器、孔隙水压力传感器、三维激光扫描仪、高清相机等试验仪器分别对滑坡模型倾斜变形、应力、位移云图、坡面形态等进行高精度监测,分析滑坡演化过程中的倾斜变形以及应力响应特征,根据试验结果总结滑坡演化失稳过程并对滑坡进行预测分析。
1 试验装置与方法
1.1 试验装置
本文开展了一系列降雨滑坡物理模型试验,试验装置主要包括滑坡模型、降雨装置、监测设备等,如图1所示。其中,T1—T4分别表示安装在坡面上的4个倾角传感器,P1—P4和S1—S4分别表示安装在滑体上的4个孔隙水压力传感器和4个土压力传感器。通过倾角传感器、微型土压力传感器、孔隙水压力传感器、三维激光扫描仪、高清相机等试验仪器分别量测滑坡倾斜角、应力、变形、坡面形态等的变化。
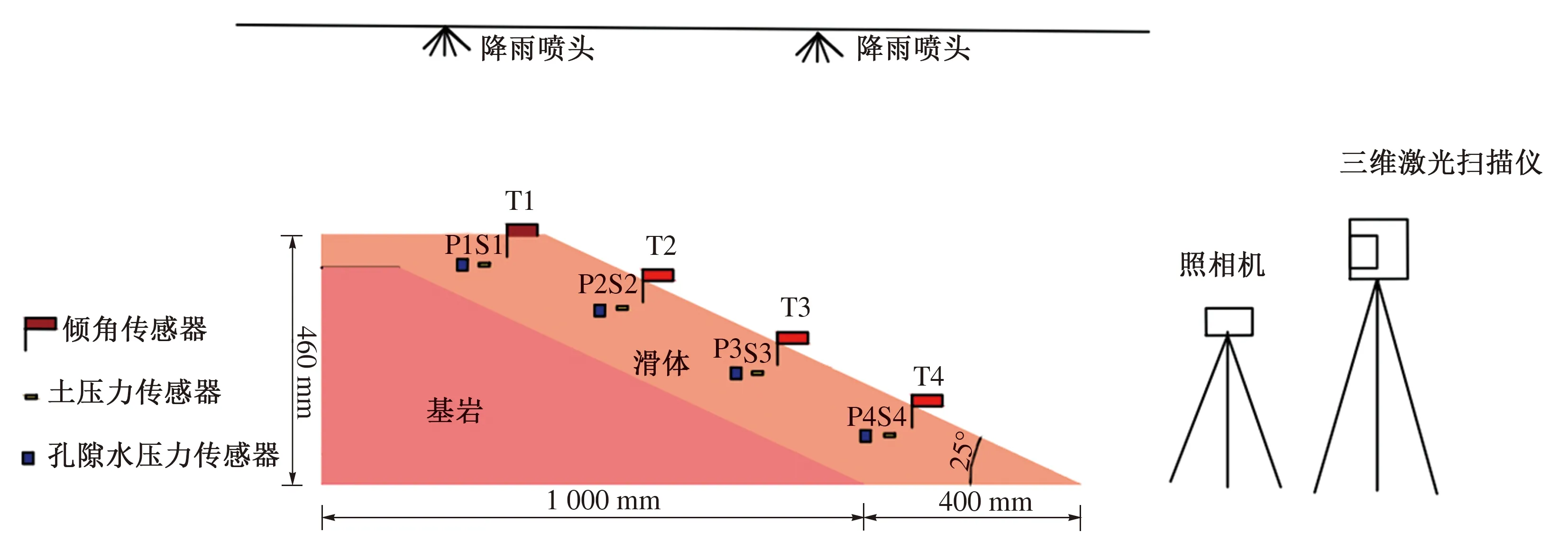
图1 模型试验装置
滑坡模型主要包括模型箱、滑体材料和基岩3部分。根据滑坡模型相似理论和相似判据[32],将豫西槐扒滑坡进行等比例缩放,构建滑坡物理模型试验。根据豫西地区滑坡的平均坡度,将滑坡模型的坡角设定为25°。模型箱采用长1.6 m、宽0.5 m、高0.5 m的有机玻璃箱体,假设基岩各向同性且无变形,因此采用长1.0 m、宽0.5 m、高0.4 m的钢板以25°角进行焊接,从而以此模拟基岩,对其表面进行轻度抛光处理。模型试验所用的滑体材料为槐扒滑坡体原状粉土,经晾晒、过筛后备用。滑体呈平行四边形,底边长0.4 m,沿模型箱宽度方向延伸。通过室内击实试验,得到土体最优含水率为16%,最大干密度为1.76 g/cm3,根据现场调查豫西滑坡的密实程度,将试验中粉土干密度控制在1.52 g/cm3。将土料拌水调配到模型试验所需的含水率后,通过颗粒筛分试验、击实试验、直剪试验、渗透试验等获取土体颗粒级配曲线、干密度-含水率曲线和剪应力-正压力曲线分别如图2、图3和图4所示,测得的模型材料的物理力学参数见表1。

图2 土体颗粒级配曲线
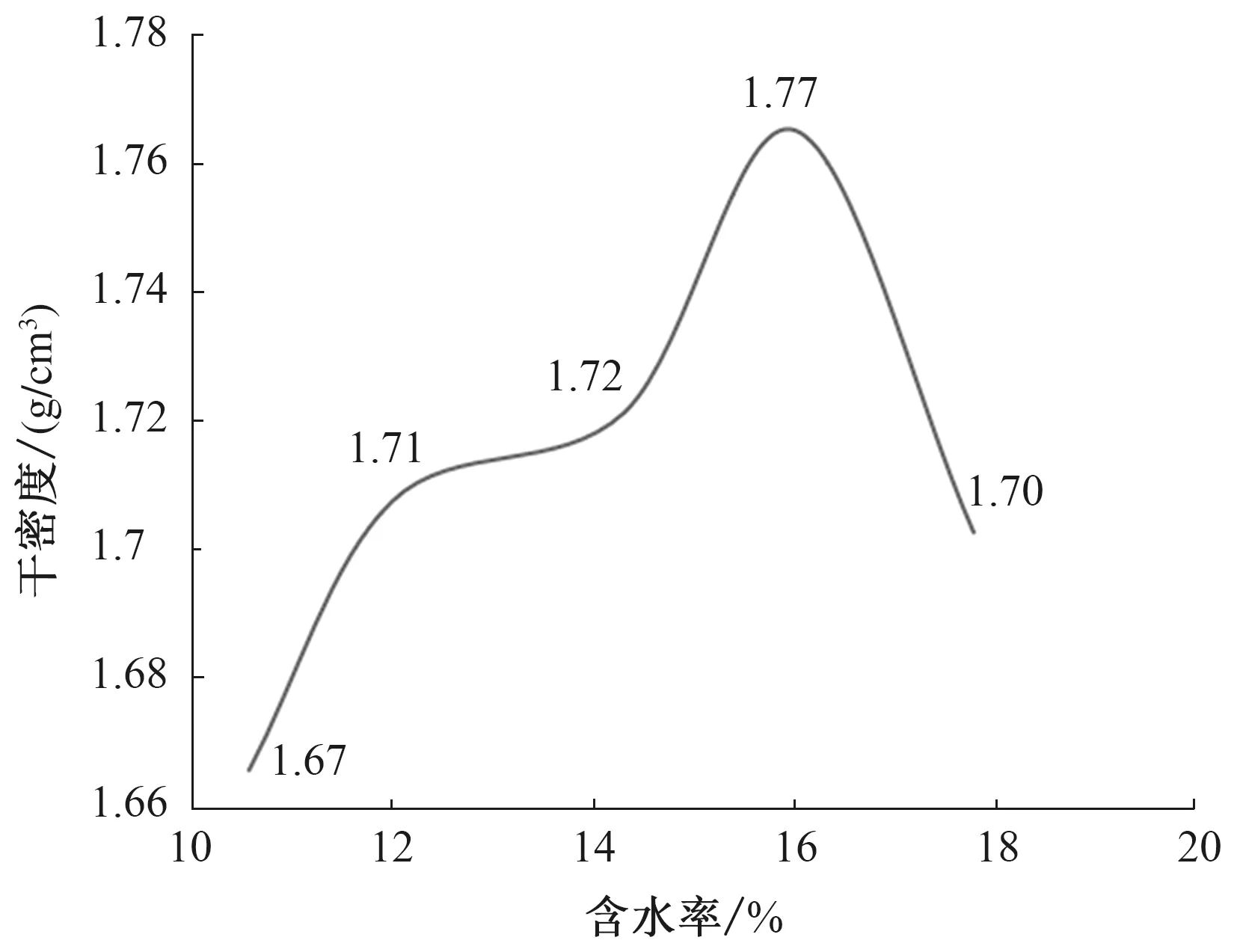
图3 干密度-含水率曲线

图4 剪应力-正应力曲线

表1 试验土体物理力学参数
降雨装置采用便携式人工降雨系统,其有效降雨面积为4 m×4 m,降雨装置高4 m,由27个不同尺寸的喷头构成。通过不同的压强及喷头组合控制降雨强度,雨强连续变化范围为10~240 mm/h;降雨均匀度系数大于0.8,雨滴大小调控范围为1.5~5.0 mm,降雨调节精度为3 mm/h(误差率小于3%);DCS全自动控制模式,液晶显示屏显示雨强数值和雨强曲线。根据豫西地区多年平均降雨量,本次模型试验中采用50 mm/h的雨强,雨滴范围自动调节。
试验采用低成本、高精度的HCA726S双轴倾角仪,该产品集成高新技术MEMS模块,体积为56.0 mm×46.0 mm×20.5 mm,量程为±10°,精度为±0.008°,分辨率为0.000 1°,数据采集频率为15 Hz。微型土压力传感器、孔隙水压力传感器的采集频率为1 Hz,其参数见表2。三维激光扫描仪型号为FARO X330,该扫描仪分辨率大于 7 000万彩色像素,能够对位于0.6~330.0 m范围内的物体进行扫描,测距误差为±2 mm。

表2 土压力传感器和孔隙水压力传感器参数
1.2 试验方法
为了探讨倾角传感器在滑坡灾变过程中的有效性,构建降雨型滑坡演化状态的倾斜行为。根据模型试验材料特点,为保证初始条件下滑体模型的均质性,对滑体模型采用分层填筑的方法。本次模型试验滑坡坡角为25°,降雨强度为50 mm/h,降雨时间为300 min,在降雨过程中将高速相机和三维激光扫描仪架置于模型正前方,通过高清相机每隔10 min记录一次坡面形态变化,利用三维激光扫描仪每隔20 min对坡面进行扫描,形成三维地形点云数据,利用surfer得到三维竖向位移云图。以40 mm×120 mm直角铁片为基座,将固定在铁片上的倾角传感器T1插入滑坡模型的后缘,T2、T3和T4等距离(210 mm)安装在滑坡模型的坡面上,铁片插入滑体的深度为60 mm。倾角传感器的两个方向分别监测滑坡纵向和横向倾斜变形,其中滑坡纵向(Y轴向)为主滑方向,滑坡横向(X轴向)与主滑方向垂直。将一系列孔隙水压力传感器P1、P2、P3、P4和微型土压力传感器S1、S2、S3、S4等间距埋设在滑坡体内来监测坡体应力变化。其中,P1和S1分别代表滑体后缘孔隙水压力和土压力测点,P2、P3、P4和S2、S3、S4分别代表滑坡坡面自上而下的孔隙水压力和土压力测点,埋置深度均约为70 mm,它们之间的水平距离约为160 mm,试验的仪器布置如图1所示。最后将滑坡模型上所有监测设备的另一端接入电脑来记录滑坡破坏过程中的数据变化。
2 试验结果及分析
2.1 滑坡演化失稳过程
本次试验中,在降雨强度为50 mm/h的条件下诱发滑坡破坏,由倾角传感器监测滑坡的倾斜变形,孔隙水压力传感器和土压力传感器监测滑坡的坡体应力,根据监测数据对滑坡模型的演化过程进行分析。
倾角传感器监测的角度-时间曲线如图5所示。分析图5可知:滑坡横向(X轴向)变形曲线在滑坡演化过程中不会出现大幅度变化,试验过程中主要监测滑坡纵向(Y轴向)的倾斜变形;滑坡的倾斜变形曲线具有典型的非线性特征,可以分为基本稳定阶段、变形初始阶段和变形失稳阶段。在滑坡模型的变形初始阶段,坡面无明显的垮塌破坏现象,滑动面还未形成,倾角传感器可以监测到坡面微小的变形,基于此可提出相应的预防措施;在滑坡模型的变形失稳阶段,模型出现显著的破坏特征,可以将该阶段作为滑坡临滑预报的关键阶段。滑坡模型的演化过程表现为:在降雨初始阶段,滑坡处于基本稳定状态,标志点未发生明显位移,坡面未出现明显变形和裂缝;随着降雨的入渗,滑坡土体强度逐渐降低,滑坡进入初始变形阶段,滑坡的稳定状态受到破坏,滑坡前缘土体的抗剪强度小于剪应力而首先发生降雨侵蚀现象,随着滑坡前缘的细沟逐渐加深变宽,滑坡前缘发生局部滑塌现象,滑坡中后部未见裂缝出现;随着降雨持续,垮塌部分由坡脚逐渐向滑坡中后部扩展,垮塌面积逐渐变大,降雨180 min后,滑坡坡面的中后部出现剪切破坏;随着降雨持续,坡面垮塌不断向后缘发展,降雨280 min左右,滑坡后缘出现沉降,最终形成前缘牵引式滑动破坏。
由图5还可以看出,同一滑坡不同区域呈现出不同的倾斜变形特征,具体表现为:倾角传感器T4监测的角度变化曲线在70 min时开始缓慢上升,明显早于滑坡其他区域倾角传感器监测到的,说明该滑坡区域最先开始发生微小的倾斜变形。由于滑坡前缘在重力和降雨的作用下最先出现冲沟和局部滑塌,对应的该滑坡模型区域进入变形初始阶段。降雨持续到120 min左右,倾角传感器T4的变形曲线斜率不断增加,滑坡前缘进入变形失稳阶段而首先发生垮塌破坏。紧接着T3、T2和T1的倾斜变形曲线开始缓慢上升,其角度变化率依次减小,这是由于降雨入渗导致滑坡体的有效应力降低,滑坡的变形由坡脚不断向后发展,滑坡中后部也相继发生缓慢变形。随着降雨持续,垮塌部分由坡脚向滑坡中后部扩展,直至倾角传感器T3、T2和T1监测的倾斜变形曲线进入变形失稳阶段。

图5 倾角传感器T1—T4监测的角度-时间曲线
在降雨条件下,该滑坡模型呈前缘牵引式滑动破坏,滑坡前缘首先出现局部垮塌,随着降雨的持续,垮塌部分由坡脚扩展到整个坡面,直至滑坡进入整体滑动破坏。由于坡脚在降雨条件下最先发生垮塌,相对应倾角传感器T4的角度-时间曲线最先出现上升现象,因此根据T4的倾斜变形曲线可以判断滑坡预兆信息。在滑坡的变形初始阶段,倾角传感器周围滑坡区域没有发生明显破坏,当倾角传感器的角度-时间曲线进入变形失稳阶段,滑坡的倾斜变形率增大,滑坡进入加速破坏阶段,在该阶段可以观察到倾角传感器的滑坡区域出现明显的破坏特征,直至滑坡完全破坏。所以,可以将曲线的变形初始阶段作为滑坡发生的预警阶段,将倾角变化率作为滑坡破坏的预警值。
在滑坡演化过程中,滑坡体内孔隙水压力和土压力的变化特征反映了滑体内部应力状态的传递与转移过程,以及滑体内部的滑动与挤压过程。孔隙水压力传感器P1和土压力传感器S1埋设在滑坡后缘,P2、P3、P4(S2、S3、S4)代表滑坡坡面自上而下的孔隙水压力(土压力)测点,监测的孔隙水压力和土压力变化过程如图6所示。由图6(a)可知,滑坡体内孔隙水压力变化过程可划分为3个阶段:缓慢增长、加速增长、快速下降。降雨初期,由于孔隙内气体的存在,滑坡体内并未形成稳定的渗透通道,滑坡整体处于基本稳定状态,随着降雨由坡面向坡体内部逐渐渗透,孔隙水压力增长缓慢;降雨入渗使土体由非饱和状态向饱和状态过渡,坡体渗透系数增加,逐渐形成稳定的渗透通道,孔隙水压力处于快速增长阶段;由于雨水的汇聚效应,坡面上孔隙水压力测点P4、P3、P2、P1依次开始显著增长,当土体抗剪强度小于剪应力时,滑坡失稳滑动,孔隙水得以快速释放,孔隙水压力显著降低。降雨70 min左右,P4的孔隙水压力快速增长,坡脚区域发生降雨侵蚀现象,滑坡的稳定状态受到破坏;降雨120 min左右,坡脚发生滑塌破坏,P4的孔隙水压力快速下降,该曲线变化形态与倾角传感器T3的倾斜变形曲线基本一致。随着降雨入渗强度增加,P3、P2的孔隙水压力进入加速增长阶段,滑坡进入初始蠕滑阶段,随着垮塌范围从坡脚向后缘扩展,P3的孔隙水压力开始出现下降,该滑坡区域逐渐发生破坏;降雨180 min左右,后缘拉裂缝贯通整个坡面,滑坡后缘出现台阶式滑动,P1、P2的孔隙水压力依次快速下降,滑坡发生整体滑动破坏。随着降雨入渗强度的增大,土体含水量增加,导致坡体容重增大,土压力缓慢增加。由于滑体下滑趋势增强,导致土体被逐渐压密,也会引起土压力缓慢增长。因此,在滑坡演化过程中,坡脚在降雨条件下最先发生滑塌,由于滑体内部的滑动挤压作用,坡脚处的土压力明显高于滑坡模型其他区域的(图6(b))。
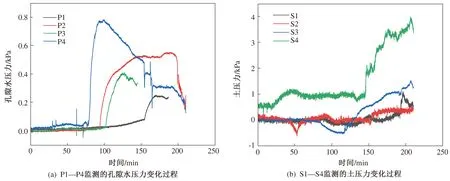
图6 孔隙水压力、土压力变化过程
根据以上试验结果分析,在滑坡的演化过程中,由倾角传感器监测的滑坡的倾斜变形曲线与坡体应力变化具有一致性。因此,利用倾角传感器可以监测滑坡的倾斜变形,根据角度-时间曲线可判断滑坡预兆信息。根据滑坡倾斜变形曲线和坡体应力响应进一步分析滑坡的演化过程。
2.2 滑坡预测分析
根据角度-时间变化曲线分析,滑坡倾斜变形经历了从变形初始阶段到变形失稳阶段,最终完全破坏的全过程。滑坡在变形初始阶段,其倾斜变形曲线出现上升,可以计算出滑坡的开始破坏时间。滑坡在临滑前会经历加速变形阶段,当进入变形失稳阶段,滑坡角度变化率增大,可以进一步计算出滑坡的完全破坏时间。因此,根据滑坡的倾斜变形曲线可以分析滑坡的演化过程,并进一步预测滑坡的破坏时间。
根据倾角传感器监测的角度-时间曲线,可以观察到滑坡在变形初始阶段曲线缓慢上升,在变形失稳阶段角度变化率增加,倾斜变形曲线陡升,而角度变化率与时间呈线性关系,如图7所示。

图7 滑坡演化阶段数据的分析图[33]
本文基于以滑坡破坏前的倾斜特性与持续时间的相关性来预测滑坡破坏的思想[33],研究滑坡在变形初始阶段和变形失稳阶段角度变化率的倒数与时间之间的线性关系,基于此线性关系提出线性相关方程,并利用该方程预测滑坡开始破坏和完全破坏的时间。
根据角度-时间变化曲线,角度变化率采用方程(1)进行计算:
(1)

在该研究中,考虑到监测数据波动的影响,在滑坡开始破坏前的变形初始阶段选取的角度变化间隔为0.1°的数据序列进行分析,在滑坡完全破坏前的变形失稳阶段选取角度变化间隔为0.5°的数据序列进行分析。

(2)
根据以上分析方法,将倾角传感器T1—T4监测得到的角度-时间曲线变形初始阶段和变形失稳阶段的角度数据代入式(2),可以得到角度变化率的倒数与时间的线性关系,并做出相应的拟合线,当角度变化率的倒数为0 min/(°)时,对应的即为滑坡开始破坏和完全破坏的时间。由T1、T2、T3和T4得到的角度变化率倒数与时间的变化关系如图8、图9所示。

图8 变形初始阶段角度变化率的倒数随时间的变化
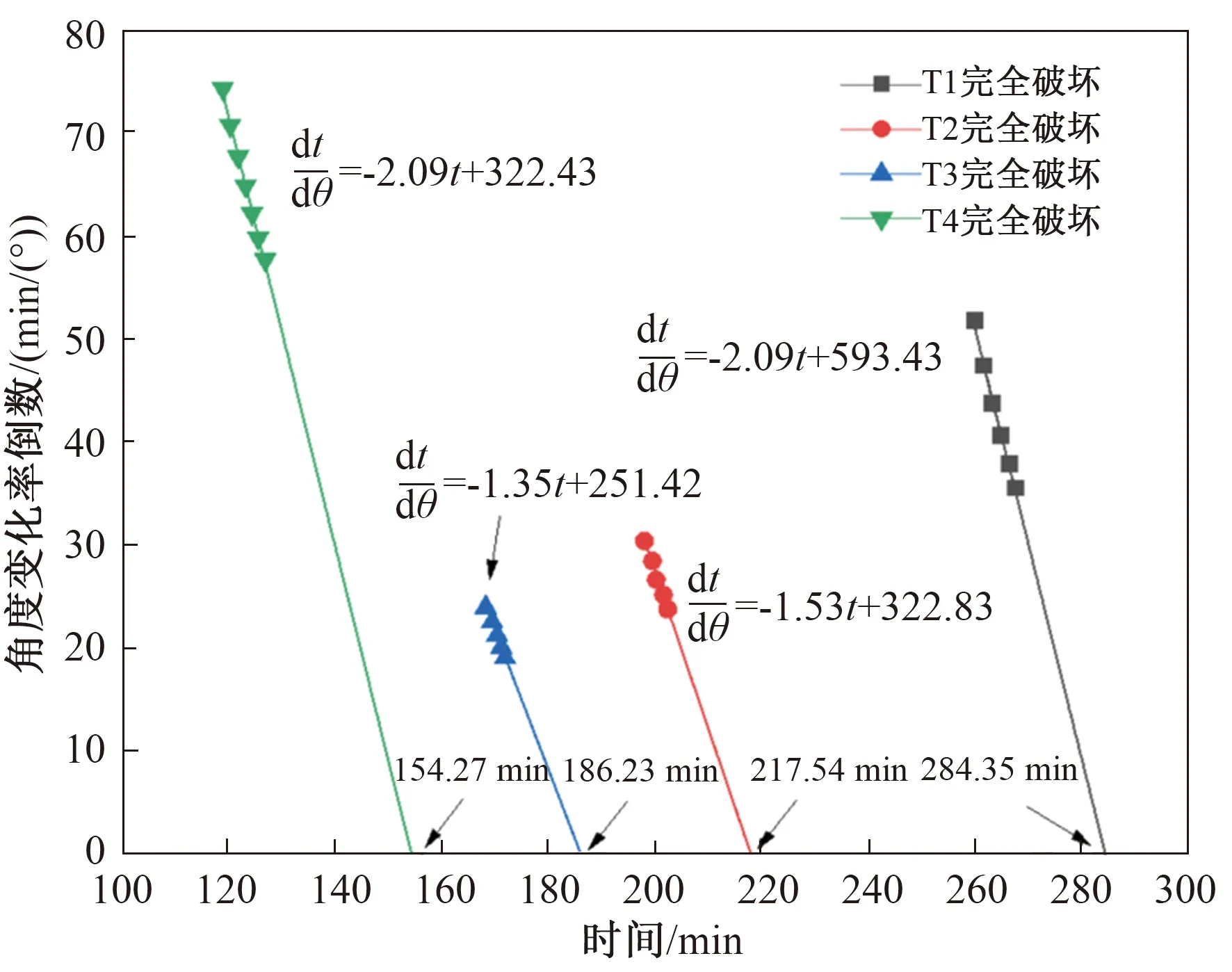
图9 变形失稳阶段角度变化率的倒数随时间的变化
由图8可知,在变形初始阶段,由线性方程计算T4、T3、T2和T1处区域开始破坏的时间分别为92.65、175.58、195.50、202.33 min。由图9可知,在变形失稳阶段,由T4、T3、T2和T1角度变化率倒数与时间的拟合线计算滑坡完全破坏的时间分别为154.27、186.23、217.54、284.35 min。
在滑坡演化过程中,由于坡脚在降雨条件下首先发生局部破坏,倾角传感器T3首先监测到滑坡的倾斜变形,随着滑塌部分逐渐向上延伸至滑坡中部,倾角传感器T2监测到滑坡中部开始发生倾斜变形,紧接着坡脚完全滑塌,倾角传感器T3达到量程而失效;随着降雨的持续,滑坡后缘的拉裂缝向下延伸至贯通整个坡面,滑坡后缘发生微小的错台式滑动,倾角传感器T1开始监测到滑坡的倾斜变形,滑塌部分由坡脚向上延伸至滑坡中部完全破坏,倾角传感器T2达到量程而失效,最后滑坡发生整体滑动,滑坡后缘的倾角传感器T1达到量程而失效。
根据试验过程中得到的滑坡失稳过程的坡面形态如图10所示,将三维激光扫描仪的监测数据导入Surfer进行分析,得到滑坡失稳过程中竖向位移云图,如图11所示。由图10和图11可知,在滑坡的演化过程中,其破坏模式是前缘牵引式破坏,具体表现为:降雨持续90 min后,坡脚首先发生局部破坏,坡面无明显的变形;随着降雨持续,滑坡前缘的细沟逐渐加深变宽,滑坡前缘发生局部滑塌现象,滑坡中后部未见裂缝出现;随着降雨持续,垮塌部分由坡脚逐渐向滑坡中后部扩展,垮塌面积逐渐变大,降雨180 min后,滑坡坡面的中后部出现剪切破坏现象,由T3监测的角度逐渐变大直至其达到量程而失效;降雨200 min后,垮塌部分由坡脚扩展至整个坡面,倾角传感器T2失效;降雨280 min后,由于滑坡后缘出现沉降,滑坡失去支撑后最终导致滑坡整体滑动,倾角传感器T1达到量程而失效。

图10 不同时刻滑坡坡面形态图

图11 不同时刻滑坡竖向位移云图
因此,根据倾角传感器监测的角度-时间曲线预测滑坡开始破坏与完全破坏时间与滑坡实际破坏时间基本一致。
3 讨论
本研究的目的是为了验证倾角传感器在滑坡演化过程中的有效性,从而进一步根据其倾斜变形曲线预测滑坡破坏时间。
倾角传感器是利用微电子机械系统(MEMS)开发的一种新型、低成本实时监测系统[34],本研究中每个倾角传感器的成本约1 600元,安装过程少于5 min。基于IVERSON R M等[35]的模型试验结果分析,滑坡的角度随着位移的增加而增加。因此,可以将滑坡的倾斜行为视为滑坡的指示信息,这样可以在一定程度上实现大面积部署,提高了预警效率,进一步提升了地质灾害监测水平。
XIE J R等[33]通过一系列模型试验和现场试验研究了滑坡的倾斜行为,基于坡面倾斜变形提出预测滑坡发生的新方法。与本研究结果不同的是该研究中的角度-时间曲线没有明显的阶段性变形特性,其倾斜变形曲线由平缓到突然上升的过程如图12所示。分析其可能原因如下:①试验中倾角传感器选择的差异性。本滑坡模型试验研究所用的倾角传感器数据采集频率为15 Hz,XIE J R等在研究中所用的倾角传感器的采集频率为1 Hz,采集频率越高,时域内信号分辨率越高,采集到的信号越接近原始信号。②试验持续时间的差异性。本研究的降雨模型试验持续时间约300 min,而XIE J R等的降雨模型试验的持续时间约为50 min。因此,可以猜测:降雨时间短,则滑坡的蠕变变形不明显;随着降雨量逐渐接近阈值,滑坡产生较大的倾斜变形而加速破坏。
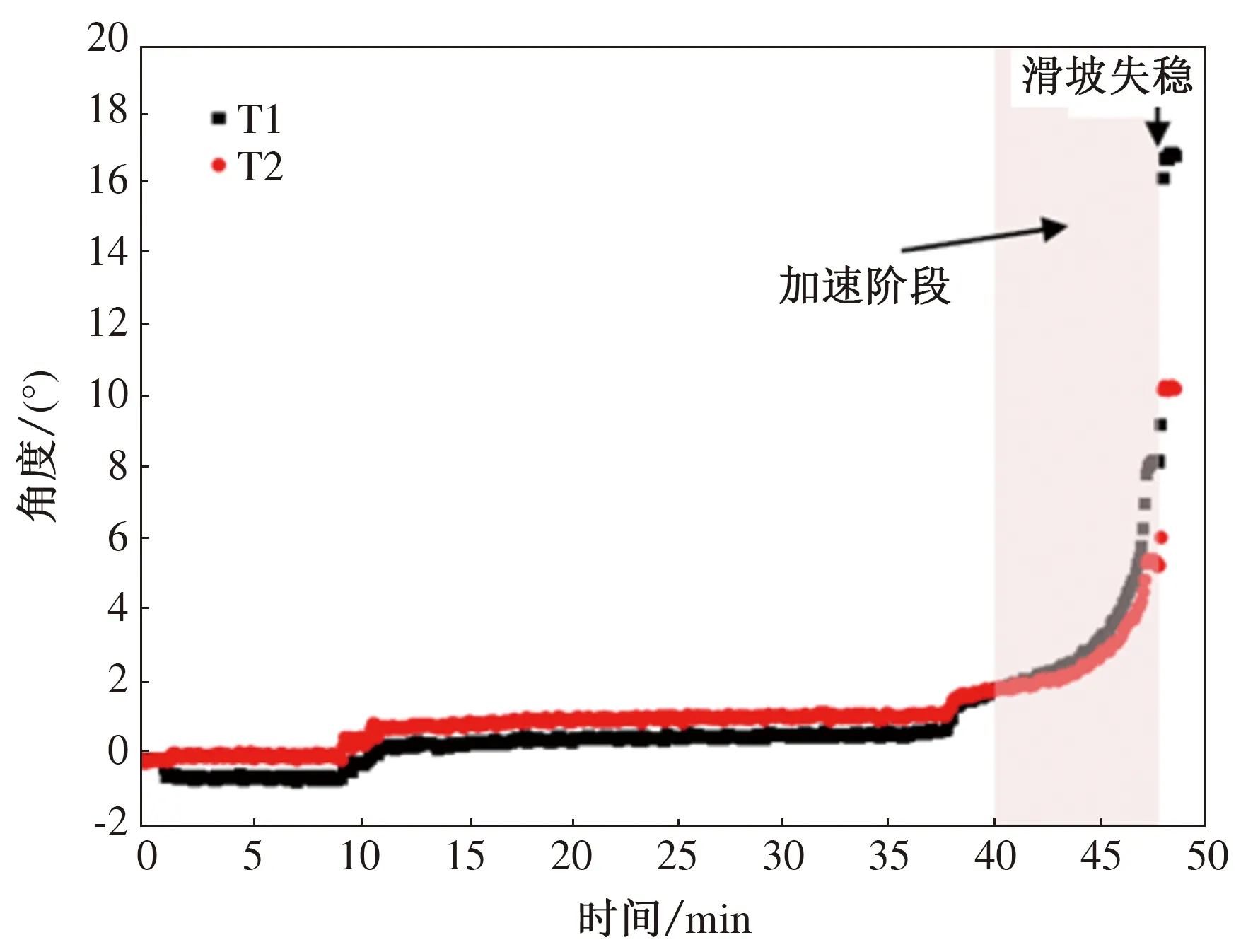
图12 倾角传感器T1和T2监测坡面倾斜时程[33]
本文以角度-时间曲线为主要监测数据,结合坡体应力、变形云图以及坡面形态分析滑坡的倾斜变形及演化过程。在降雨条件下,滑坡倾斜变形不仅发生在坡体表层,具有向坡体内部逐渐扩展的趋势,促使滑坡向不稳定的方向发展。滑坡破坏过程中坡面形态、变形云图以及坡体应力的变化趋势与滑坡的倾斜变形曲线基本一致。
变形初始阶段是滑坡发生的预防阶段,滑坡在该阶段无明显的开裂迹象,滑动面还未形成,由倾角传感器监测数据可知,坡体发生微小的倾斜变形,没有明显的破坏。为了及时采取相应的工程防护措施,减少灾害发生,可以根据该阶段的倾斜变形曲线预测滑坡的开始破坏时间。当滑坡进入变形失稳阶段,后缘拉裂缝变形加速,滑动面开始贯通,滑坡整体开始滑动,因此变形失稳阶段是滑坡临滑预报的关键阶段。根据角度-时间曲线的变形初始阶段可以得到角度变化率倒数与时间的线性关系,并提出相应的线性方程(式2),以方程中的倾斜率倒数为0 min/(°)时作为阈值,可得出滑坡坡下、坡中、坡上以及滑坡后缘的开始破坏时间分别为92.65、175.58、195.50、202.33 min。同理,根据曲线的变形初始阶段,由T4、T3、T2和T1角度变化率倒数与时间的拟合线计算得到滑坡完全破坏时间分别为154.27、186.23、217.54、284.35 min。通过与试验结果对比分析,表明利用该方程预测滑坡破坏时间与本次试验记录的滑坡实际破坏时间基本一致。因此,利用滑坡的倾斜变形预测滑坡的破坏时间是一种简单高效的方法。
4 结论
本文采用地质力学模型试验方法,在降雨诱发滑坡破坏的条件下,分析滑坡演化过程及其倾斜变形特征,并根据倾角传感器监测得到的角度-时间变化曲线,预测滑坡的开始破坏时间和完全破坏时间。主要结论如下:
1)倾角传感器作为一种新型监测仪器,由于其成本低、精度高且安装简单,可以广泛应用于滑坡监测。
2)通过分析倾角传感器监测的角度-时间试验曲线,可以将滑坡演化过程分为基本稳定阶段、变形初始阶段和变形失稳阶段。结合模型试验的倾斜变形曲线及其演化状态,可以将变形初始阶段作为判断滑坡失稳的预警信息。
3)根据滑坡倾斜变形曲线可以预测滑坡的破坏时间。利用角度-时间曲线的变形初始阶段和变形失稳阶段分析角度变化率的倒数与时间的线性关系,提出相应的拟合方程,将方程倾斜率的倒数设为0 min/(°)作为阈值,可以进一步预测滑坡的开始破坏时间和完全破坏时间。并且,其预测时间与滑坡演化过程中的坡面形态、位移云图、坡体应力等参数具有一致性。