TRIZ理论与人机工程学原理在多功能助老装置设计中的应用
2022-12-18许春霞YANGYue周睿迪罗志伟
许春霞,张 涵,胡 瑞,,YANG Yue,周睿迪,罗志伟,熊 震
(1.南昌工程学院 江西省精密驱动与控制重点实验室,江西 南昌 330099;2.南昌大学 先进制造学院,江西 南昌 330031;3.The Department of Mechanical Engineering,TheUniversity of Sheffield,Sheffield,S1 3JD)
随着年龄增长,人的体能、感官和认知能力等身体机能都在衰退;同时,由环境污染和交通事故引起的疾病、意外等导致越来越多的人丧失生活自理能力,这使得助老助残成为全社会的研究热点。据调查老年人非常渴望外出与他人交流,同时适量的户外活动也有助于老人保持身心健康[1]。助老机械能帮助老年人最大限度地恢复或替代下肢功能,满足自主生活能力,因此对助老助残产品的社会需求日益增加[2]。
近年来,国内外已开发出以拐杖和座椅为载体的具有不同辅助功能的助老装置。周杰[3]等开发了一种能够自主分析拐杖自身平衡状态的智能单拐,其可分辨老人行走状态并判断是否摔倒,能及时反馈老人的位置状态而缩短救助时间。景婷婷[4]等在单拐上引入嵌入式系统,集成照明、摔倒呼救、GPS等功能以方便老人出行。Ridder[5]等在双拐中添加活动传感器,可记录病人活动状态,并将患者运动信息反馈给医生,并以此作为医生诊断依据。曾宇露[6]等运用 TRIZ 创新设计理论,结合阿奇舒勒矛盾矩阵,对如厕助力产品的辅助形式和结构进行设计,同时引入防滑机构实现了如厕助力装置的设计。Kundu[7]等设计了具备智能控制功能的电动轮椅,其依据肌电意图界面来获取前臂肌肉的传递信号,并运用神经网络分类器判别用户的意图,进而实现对轮椅运动方向的控制。
上述的助老拐杖设计存在辅助功能单一、舒适性低、成本高和推广难的缺点,无法满足老人的独自户外出行需求。基于此,本文根据TRIZ理论和人机工程学原理设计出精简型多功能助老装置,以多功能模块结构为核心,通过有限元法分析助老装置的力学性能,并通过实物制备验证了方案的可行性。
1 基于TRIZ理论对多功能助老装置问题分析
TRIZ理论是Altshuler在研究250万件专利的基础上提出的多学科结合的创新理论体系[8-10],其遵循发明创造过程中的科学原理、方法和规律,帮助开发人员解决实际工程问题。作为解决设计问题工具包的TRIZ理论[11],矛盾矩阵是其最重要的工具之一。矛盾矩阵能高效解决技术矛盾,对问题进行深入研究以找到简单、高效、经济的解决方案[12-14],解决实际问题中出现的技术冲突描述,并在此基础上确定工程参数,在冲突矩阵中选择相应的发明原理,再根据发明原理找到问题解决方案模型,并确定最终方案以达到优化产品功能的目的[15]。
多功能助老装置应用TRIZ方法可以被封装为4个步骤[16]:
(1)多功能助老装置具体问题模型,将问题转换为识别技术冲突。
(2)通过匹配改善参数和恶化参数,与39个TRIZ工程参数的列表进行映射来构建矛盾矩阵。
(3)确定设计参数之间的矛盾参数问题:增加功能会导致助老装置的重量增加、助老装置变身模块的加入会使助老装置的机械结构变得复杂。
(4)依据矛盾矩阵和40条TRIZ原则,选择合适的TRIZ发明原则并解决相关矛盾。
1.1 阿奇舒勒矛盾的参数识别
目前助老装置存在辅助功能单一、难以满足老人独自出行需求的问题,如户外需要休息、如厕、起身难等。若为迎合特殊人群的需求增加助老装置的功能,将导致其重量增加;此外,助老装置的机械形态结构会随着自动化水平的提高而变得复杂。因此,基于上述确定的设计参数(改善参数与恶化参数)之间具有两个矛盾:第一个矛盾中确定的改善参数是多功能性,而与之相关的恶化参数是座椅的重量增加;第二个矛盾中确定的改善参数是助老装置自动化水平,而与之相关的恶化参数是装置的机构复杂性。
1.2 阿奇舒勒矛盾的矩阵构建
在认识并确定出设计要求之间的矛盾后,在多功能助老装置创新设计过程中将改善参数、恶化参数与39个TRIZ工程参数进行准确映射,映射目的是构建改善参数和恶化参数的矛盾矩阵,并识别出合适的TRIZ发明原理[12]。表1阐明了所选TRIZ工程参数与相关发明原理之间的关系。
1.3 开发设计策略
基于使用 40 项发明原理方法的开发设计策略,其主要通过检查矛盾矩阵(见表 1)得到解决矛盾所需的发明原理[13]。为实现多功能助老装置设计并避免总重量增加,选定的创新原则具体有分段(No.1)、多功能(No.6)、抗重(No.8)和动力学(No.15)。进一步地,为提高座椅的自动化水平同时避免其结构的复杂性,本装置选择了分割(No.1)、倒置(No.13)、颜色变化(No.32)和动态(No.15)的发明原理;最后,依据矛盾矩阵提出的创新原则和选择最相关的原则(即普遍性(No.6)、反转(No.13)和动力学(No.15))作为多功能助老装置创新设计的指导思想。表2解释了基于公认的发明原理所采用的设计策略。
根据阿奇舒勒矛盾矩阵同时结合实际条件,确定应用3条发明原理。针对多功能助老装置解决自重偏大、功能单一、机械机构复杂等难题进行了创新设计,具体设计策略为提高多功能助老装置的多功能性、减轻整体重量、提高自动化水平以及降低机械结构复杂性。所用原理如下:
(1)应用No.6多功能原理,将座椅、坐便椅与拐杖功能结合重构设计出多功能助老装置。坐便板和座椅板通过合页连接在一起,并通过翻折板可在座椅和坐便椅之间切换。
(2)应用No.13反演原理,辅助起身机构+扶手辅助老人如厕坐下和站立。多功能助老装置如厕机构每一部分都装有电机,将电能变换成机械能传递给支撑杆,再由支撑杆撑起坐便板,从而达到辅助起身效果。
(3)应用No.15动态性原理,多功能助老装置变换成拐杖形态时,将坐便板从侧面翻起并固定在主骨架扶手上,即可拆分为两根拐杖。双拐不仅大大增加了稳定性且防滑功能也更加出色,需要休息时两座椅板翻下盖住坐便板就可形成座椅。

表2 基于选定TRIZ发明原理的设计策略
2 多功能助老装置的创新设计
2.1 整体结构
本装置是一种多种功能耦合形成的新型助老装置,其主体是基于人机工程学原理与TRIZ理论重构多功能助老装置的机械连杆结构。多功能助老装置结构如图1所示。主架骨①起主要支撑作用,坐便板②和座椅板⑤通过合页⑦连接在一起,可通过翻折实现座椅和坐便椅之间切换;将坐便板从侧面翻起,固定夹的另外一边固定在主骨架扶手上,同时也把固定腿夹的另一边固定在同侧主骨架上,这样即可将该装置拆分为两根独立拐杖;当为座椅形态时,也可当作行走座椅四脚拐杖来使用。座椅扶手具有伸缩性,可根据需要伸长为支撑拐杖,以帮助残疾老人在康复期间行走。
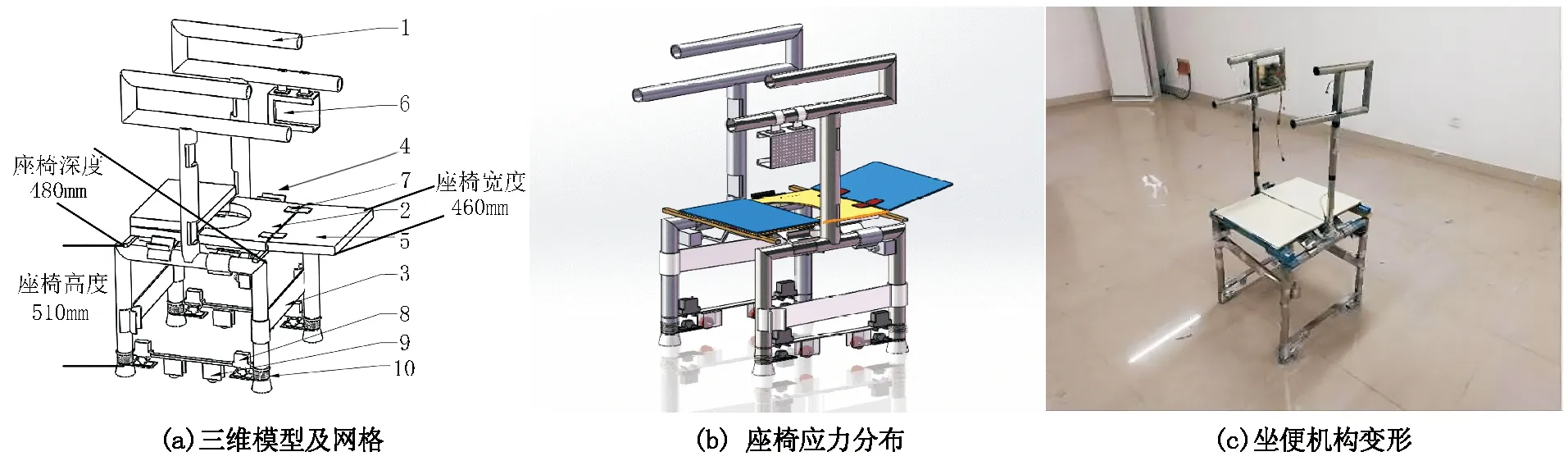
图1 多功能助老装置三维模型及其实物样机图注:1—主骨架;2—坐便板;3—固定腿夹;4—舵机;5—座椅翻折板;6—放音器放置盒;7—合页;8—自锁扣;9—车轮;10—弹簧
2.2 多功能助老装置设计方案具体化
多功能助老装置设计方案的核心理念是根据需要轻松转换工作状态,最终实现辅助老人独立外出与生活。各工作状态如图2所示。

图2 多功能助老装置工作状态图
多功能助老装置结构设计分为可分离单双拐机构、坐便机构(此时合体也是行走座椅四脚拐杖机构,如图2(b)所示)、辅助起身机构。三个机构的设计方案、功能都进行了具体化设计,多功能助老机械的总—分功能解析如图3(a)所示。相应地,该助老装置主要有I、II两个变形控制环节组合,实现上述工作状态变形,控制工作原理如图3(b)所示:(1)变形控制环节I中舵机④驱动座椅翻折板⑤,实现坐便椅和座椅的变形工作,同时坐便/座椅休息机构合体时也是行走座椅四脚拐杖机构。变形控制环节II中,固定腿夹③配合变形控制环节I可实现辅助起身机构;(2)装置需要变换成拐杖形态时,只需将变形控制环节I中坐便板②从侧面翻起,再把固定夹③固定在主骨架扶手上,另外固定腿夹也将另一边固定在同侧主骨架①上,这样装置即可拆分为两根拐杖,即实现单双拐机构。
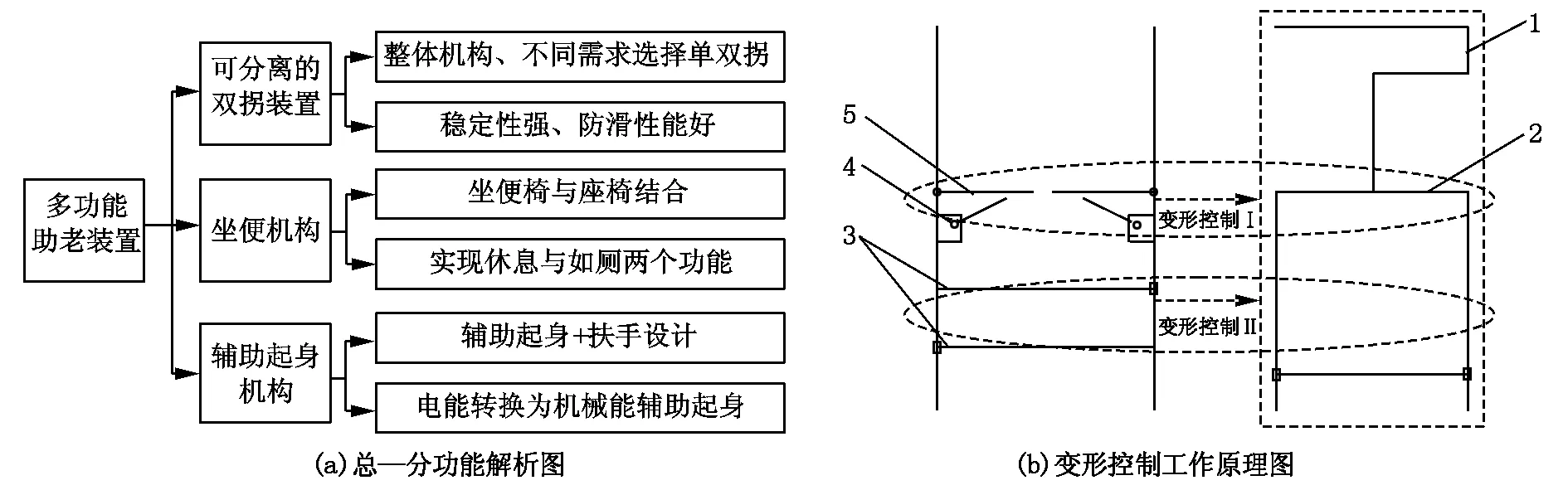
图3 多功能助老装置总体技术图注:1—主骨架;2—坐便板;3—固定腿夹;4—舵机;5—座椅翻折板
2.2.1 可分离的单双拐机构设计
可分离单双拐机构是多功能助老装置的重要组成部分,本文运用TRIZ理论解决技术矛盾的方法对助老装置进行了创新设计,可实现按实际需求选择单拐或双拐状态。单拐主骨架拥有两根支撑腿支点,显著提升稳定性和防滑能力,如图2(c)所示;双拐机构整体竖向分离变成两根拐杖,可辅助老人和下肢残疾者独立行走,如图2(d)所示;当老人需要休息时也可将单拐拼接到一起变成座椅,如图2(a)所示。可分离的双拐机构主架采用重量轻但耐用的不锈钢空心管,能承载整个机械机构和操作中用户的自身重量。
2.2.2 坐便机构设计
坐便机构由4块板子通过4片合页两两连接组合构成,通过板子的翻转折叠可便捷收放,实现座椅与坐便两个功能的变换:将座椅板合起来覆盖坐便板就能转变为休息座椅,而将座椅板翻折打开就能变成坐便椅;这解决了老人户外上厕所只能蹲便的难题,同时也能满足老人坐下休息时当成座椅的需求,坐便机构结构示意图和实物图分别如图4(a)和4(b)所示。

图4 坐便机构结构示意图(a)及实物图(b)注:1.座椅板 2.开折合页 3.坐便板 4.支撑主骨架
2.2.3 辅助起身机构设计
辅助起身机构由座椅脚①、支撑杆②和坐便板③组成,电机和支撑杆一端与连接轴固定连接在座椅脚,另一端同座面板固定。老人起身时,电机带动支撑杆绕轴旋转抬高,使坐便板上翻辅助老人起身,帮助老人更轻松地站起。该机构的原理简图和实物图分别如图5(a)和5(b)所示。

图5 助起身机构原理简图及其实物图注:1.座椅脚 2.支撑杆 3.坐便板
辅助起身机构是一个连杆机构,支撑杆/驱动杆(2)一端连接电机B,另一端连着坐便板(3),座椅脚(1)与坐便板铰接,铰接点为A。当电机驱动杆(2)向上翻转使得坐便板缓慢上升,从而实现辅助老人起身功能。
在平面机构中,只有原动件才能够独自运动,而从动件是不能够单独运动的,且一个原动件只有一个独立运动。因此,在设计机构时自由度(F)会等于原动件数。机构具有确定运动的条件是:机构的F>0,且F=原动件数;如果机构F=0,则机构不能运动;如果机构F>原动件数,则机构的运动是不可知的;机构F<原动件数,机构不能运动并会损坏机构脆弱的部分。基于此,计算F时需要考虑机构中的复合铰链、虚约束以及局部自由度这些情况。平面机构F计算公式[14]为
F=3n-2PL-PH,
(1)
式中n表示机构中活动构件数,PL为低副数,PH为高副数。
辅助起身机构为3杆的平面机构(如图6(a)所示),其中活动构件数为3、转动副数为3、移动副数为1,所以低副数PL=4,高副总数PH=0。根据式(1)计算可得,辅助起身机构的F为
F=3×3-2×4-0=1,
(2)
基于计算结果可知,辅助起身机构只需一个原动件就能实现辅助起身功能。
2.3 基于人机工程学原理设计多功能助老装置
目前,助老装置的开发倾向于从机械设计角度出发而忽略了用户(人)和助老装置(机器)之间的人机学工程原理,而多功能助老装置是老人日常使用物品,操作的舒适性应该受到足够重视。基于人机工程学原理对产品结构尺寸设计,助老装置的整体设计都需综合考虑老年人的身体尺度、生理特性及装置使用过程中的舒适性等因素。
通过参考市面上助老装置尺寸设计值与GB10000—1988《中国成年人的体型尺寸》,其中成年人尺寸国家标准如表3所示。表3中,四列数据对应百分位数由左至右分别为5、50、90、99。国标没有全面测量分析老年人的身体尺寸,但我国60~80岁老年男性身髙平均下降1.9%,60~80岁的老年女性平均身高下降4.0%,可依此来推算老人身高[15],本文在此基础上设计了符合中国老年人身高尺寸的多功能助老装置。
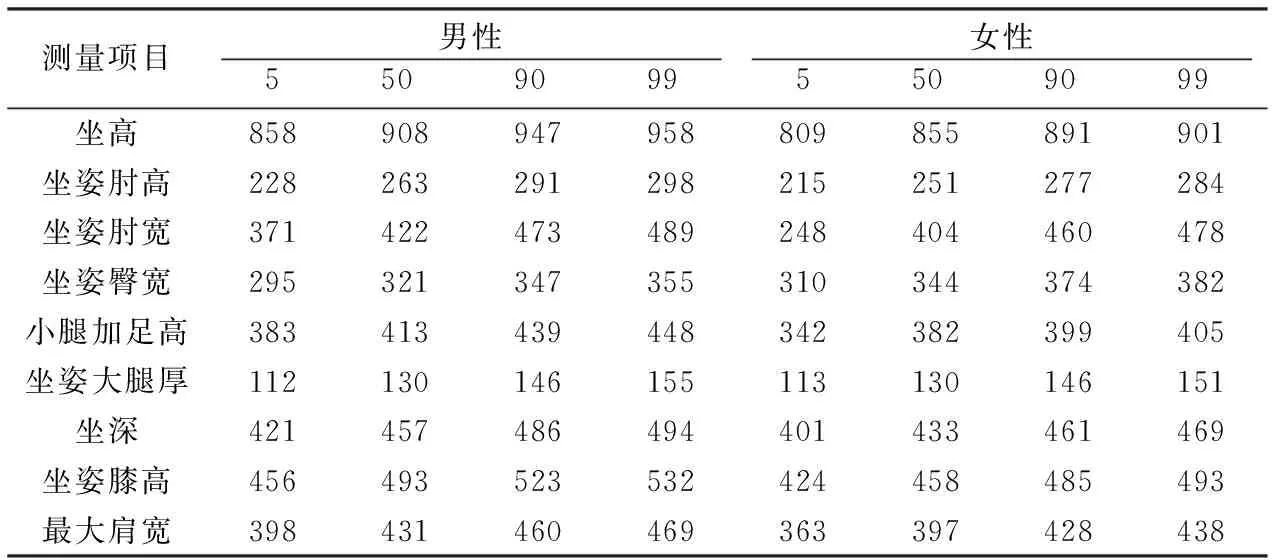
表3 人体部分坐姿尺寸 mm
(1)座椅高度
座椅高度是指当装置为座椅形态时地面与座椅面之间的距离,如图1(a)所示。合理的座椅高度能使老年人坐下休息或者如厕时大腿接近水平位置,以防止大腿与座面贴合不足而引起肌肉酸痛,同时小腿也能舒服地自然垂放。本文以老年男性的平均身高尺寸为设计依据,初步确定座椅高度为460 mm;老年女性的助老装置设计可参考本文的设计方案和过程。
(2)座椅宽度
座椅宽度是指横向方位上座椅左端面到右端面的距离。人体上半身75%的重量通过脊柱传递到距离其骨尖以下25 cm处的坐骨结节进而传到座面,这使得座椅的接触面上形成了两个接触点并承受大部分重量,因此座椅宽度必须大于使用者的坐姿臀宽。但座椅宽度也不能过宽,否则会导致重心容易朝一侧偏移而发生受力不平衡现象,进而引起侧翻。基于上述分析,本文初步确定座椅宽度为510 mm。
(3)座椅深度
座椅深度是指座椅竖向距离。座深的设计要保证臀部得到充分支撑的同时也要给大腿留出一定空间,这样小腿后部与座面前端之间才能留有活动的空间并保持小腿能够较轻松地摆放。此外,为了让座椅更具有自适应性,座深的设计通常应按照身型尺寸较小的人群设计,而身型尺寸偏大者则可调整小腿支撑角度与位置,同样可改善坐姿的舒适程度。基于此,本文初步确定座椅深度为450 mm。
除了参考人体坐姿尺寸表、市面上助老装置整体尺寸以外,还应考虑使用者的实际操作、姿势等其它因素,对上面尺寸进行适当合理的修正后,确定座椅的各尺寸如表4所示。
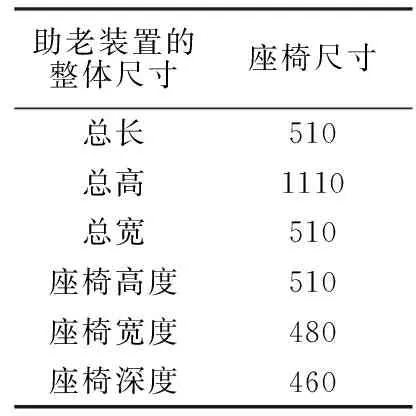
表4 修正后多功能助老装置尺寸表 单位:mm
3 多功能助老装置关键零件的应力应变
采用有限元软件分析多功能助老装置主要零件承载后的屈服应力分布,对零件工作的使用许可及性能表征具有重要意义[16],可验证多功能助老装置理论设计的可行性。本文通过分析坐便板、主骨架等关键零件在承重下的应力应变,即在588 N负载(老人半身体的重量)下其最大应力和零件变形量,在样机制备与试验之前验证本设计方案的可行性,同时也可有效避免搭建实物并测试造成的人才物力财力浪费。
3.1 坐便板的应力应变
多功能助老装置主要功能是帮助用户独自站立、休息以及如厕,其中坐便板为整个结构直接承重且受力最大的零件,是关键零部件之一。坐便板材料选用尼龙-6板,其坐感比木板舒适,且刚性大、强度高、尺寸稳定性好,符合人机工程学原理的设计要求。
坐便板外装几何尺寸设计参考老人的身体尺寸,其长400 mm,宽250 mm,厚25 mm,同时在板表面区域内施加老人一半的体重588 N,模拟老人端坐在座椅上。由于坐便板具有规则性的轴对称特性,结合精简有限元模型的运算,本文采用半边座椅为分析模型,运用SolidWorks Simulation分析该零件的受力及变形情况是否满足设计要求。图6(a)为坐便板强度刚度分析的三维模型,图6(b)~(c)是有限元分析结果。
由图6坐便板的应力应变图可知,在静载荷作用下坐便板两端的承受应力较大,且最大应力约为32.13 MPa,远小于尼龙-6板的理论屈服应力(139.00 MPa),这表明材料承重许可完全符合强度设计要求;承重条件下最大位移变形量发生于坐便板的中部,约为0.15 mm,这表明该零件完全符合刚度设计要求,能够承受老人的整个身体重量。
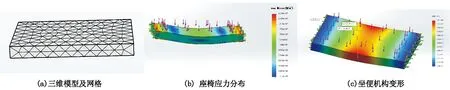
图6 坐便板的三维模型及其应力应变分析
3.2 主骨架的有限元分析
因衰老和疾病引起的下肢肌力下降是老年人和残疾人站立和行走困难的主要原因,助老装置中的主骨架可以减少用户在站立过程中的下肢肌力,并可最大限度地减少用户在提升过程中的下肢肌肉力量。本文主骨架设计采用较好重量—强度比的不锈钢空心管,在满足不影响装置机械性能和工作稳定性的前提下可最大限度地减轻装置重量,以提高装置的灵活性和便携性。
采用静态结构分析以验证框架设计可行性,静载荷条件下施加人体一半的体重588 N并应用SolidWorks Simulation对具有所有边界条件的主骨架进行静态结构分析。由图7主骨架的应力应变图可知,在承受静载荷条件下主骨架下部杆架的承受应力和变形较大,且最大应力约为40.27 MPa,远低于AISI304不锈钢的屈服应力(206.8 MPa),这表明其强度符合设计要求。同时,承重条件下发现最大位移变形量也发生于主骨架下部的杆架中,约为0.02 mm,这表明该零件完全符合刚度设计要求,完全能够承受老人的整个身体重量。
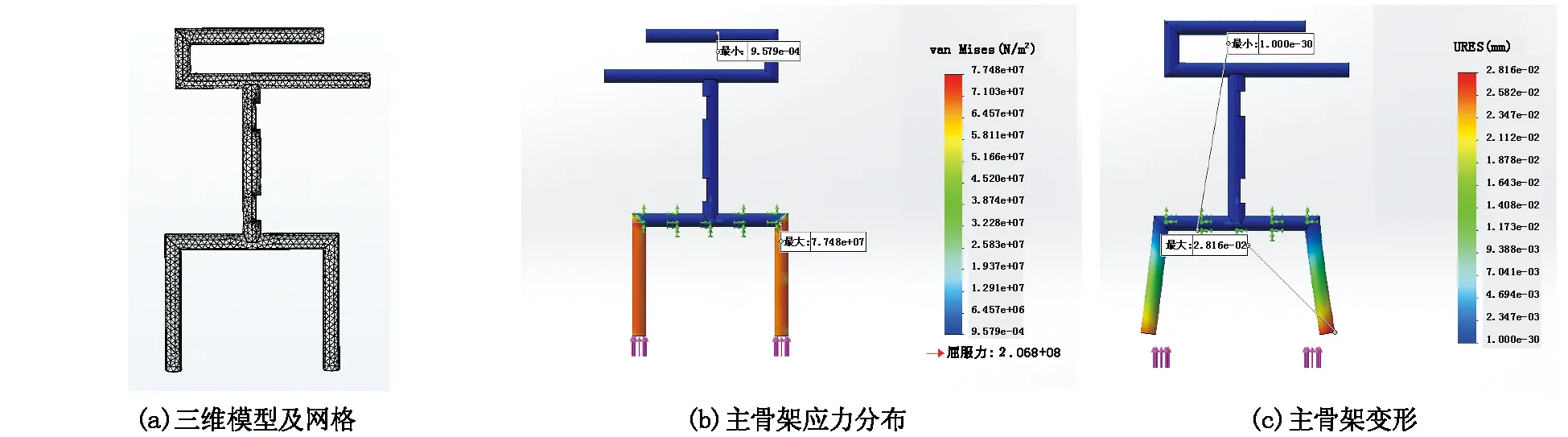
图7 主骨架有限元分析
4 结束语
针对现有助老装置操作相对复杂、功能单一、人性化和舒适度一般等而难以很好地辅助老龄人户外安全出行这一问题,本文从满足老年人的实际需求出发,基于TRIZ理论和人机工程学原理创新设计并制作了新型多功能助老装置,对其进行了结构设计、有限元仿真分析并开展了实物制备。结果表明:该装置能够帮助缺乏独立行动能力的老年人或残疾人安全出行,具有较好的应用前景和工程价值。具体研究结果如下:
(1)运用TRIZ理论与人机工程学原理,将多功能助老装置中存在的技术矛盾转换为具体的重量增加与结构复杂两个技术矛盾,并寻求到了解决技术创新设计过程中的发明原则;
(2)将人机工程学原理运用到多功能助老装置尺寸人性化上,优化助老装置主要构件的尺寸参数,以提升使用过程中的舒适性,优化后座椅尺寸为:高度460 mm、宽度510 mm和深度450 mm;
(3)通过有限元法对坐便板与主骨架进行了承载条件下的强度和刚度的许用性有限元分析,以验证助老装置尺寸与选材的合理性,并得出施加588 N重力时,坐便板和主骨架承受的最大应力分别为32.13 MPa和40.27 MPa,最大位移变形量分别为0.15 mm和0.02 mm,结果远小于两种材料的理论最大应力值和最大变形值,计算结果符合强度和刚度要求。