PPK无验潮技术在杭州湾跨海大桥河势断面观测中的应用
2022-12-17夏晓亮龚令平魏荣灏陈佳兵
夏晓亮 ,龚令平 ,魏荣灏 ,郁 蕾 ,徐 达 ,陈佳兵
(1·宁波市杭州湾大桥发展有限公司,浙江 宁波 315336;2·浙江省水利河口研究院(浙江省海洋规划设计研究院),浙江 杭州 310017;3·浙江省河口海岸重点实验室,浙江 杭州 310017)
1 问题的提出
杭州湾跨海大桥北起嘉兴市海盐枢纽,南至宁波市庵东枢纽立交,线路全长36.0 km,桥梁总长35.7 km,桥面为双向6车道高速公路,设计速度100 km/h[1]。大桥所处的杭州湾气象复杂多变,台风、龙卷风、雷暴及突发性小范围灾害性天气时有发生。同时杭州湾河口潮汐强、潮差大,悬沙与床沙的粒径基本一致,导致河床泥沙冲淤复杂多变、海底槽沟发展变化较快、桥墩涉水结构受到冲刷成为大桥安全运行的潜在隐患。
桥梁涉水结构的冲刷基本由3部分组成:自然冲刷、一般冲刷和局部冲刷。为了研究河势变化和不同冲刷对大桥的影响,一般采用在桥梁上、下游布设不同间距的河势断面进行观测。当前河势断面观测一般采用实时动态载波相位差分(RTK)技术结合单波束测深技术进行RTK三维水深测量,该作业方式不受验潮站布设影响,适用于强潮河口区作业,但常规RTK基站的无线电信号仅能覆盖10~15 km作业半径,远远小于大桥长度。浙江省连续运行卫星定位综合服务系统(ZJCORS)的网络RTK技术在该区域应用时,时常发生差分信号失锁导致无法获取高精度三维定位结果的问题;而无需数据链接的全球导航卫星系统(GNSS)载波相位后处理(PPK)技术可较好地解决该问题,并已在水库、河口及开阔海域得到应用[2-6]。
本文主要讨论PPK技术在杭州湾跨海大桥河势断面观测中的应用,介绍载波相位差分的工作原理、PPK作业流程并分析PPK作业精度。验证结果表明,PPK获取的垂向数据与潮位数据具有较好的一致性,能满足RTK三维水深测量工作要求,并可大幅减少由于差分信号链接丢失而导致的复测现象,有效提升工作效率。
2 工作原理
载波相位差分技术原理是利用GNSS观测误差在时间和空间的强相关特性,通过对基准站和流动站的原始载波相位观测数据进行双差计算,消除接收机和卫星时钟的偏差、卫星误差以及大部分电离层、对流层延迟的影响,达到厘米级定位精度[7]。
GNSS接收机在锁定某颗卫星后,在L1和L2/L5(如果具备双频或多频接收能力)上采用C/A码和P(Y)码进行伪距测量的同时,根据L1和L2/L5载波上出现的多普勒频移保持对运行周数的统计。对于每个历元,运行周数可以从接收机获取,即1个历元期间,载波相位前进(或后退)是通过对该历元期间多普勒频移(fD)的积分来测定,接收机在每个历元结束时进行小数相位测量。
虽然接收机可以精密地测量载波相位,但在总相位测量值中仍含有未知的载波周数,即载波相位整周模糊度N,求解出N后即可测定接收机与卫星的距离。
从至少2个相隔某一固定距离(称为基线)的GNSS接收机中获得相似的测量值组合并形成线性组合(差分),就有可能消除2个接收机共有的误差,这样的1个组合称为单差;对来自同一颗卫星的2个单差测量值求差可得到双差。利用双差技术处理载波相位观测值,可消除大部分误差源[8]。
3 作业流程
基于PPK的无验潮技术工作流程见图1。

图1 基于PPK技术的无验潮技术工作流程图
3.1 施测准备
使用GNSS设备和单波束测深仪进行河势断面测量。由于GNSS设备直接观测得到的结果为大地高,采用七参数转换的方法将大地高转换至目标高程系统前,需要验证测量设备和转换参数的精度,因此施测前在已知控制点对GNSS基站和流动站进行比测。另外,对单频测深仪进行稳定性和一致性测试,保证设备满足水下地形测量需要。
3.2 数据获取
每天测量前在GNSS控制点上架设基准站记录数据。测船开始作业前,先用声速计在测区测量声速并输入测深仪进行声速改正,然后将测深仪输出接口、GNSS流动站接收机定位输出接口同时与计算机连接,实现定位、测深同步,GNSS流动站接收机同时记录原始观测数据。采用海洋测量软件导航,并记录实时测量点的平面位置、瞬时水深和瞬时潮位高程,实现三维水下地形测量。测量结束后下载GNSS基准站与流动站的原始观测数据。
3.3 数据处理
数据处理主要包括3部分,分别是定位数据的预处理、测深数据的预处理、定位数据和测深数据的融合。
第一部分是采用PPK技术处理GNSS三维定位数据,本研究主要使用Trimble Business Center(TBC)软件。分别从Trimble的GNSS基准站和流动站上以T02的格式下载原始观测数据并导入TBC软件中,选择正确的天线型号并输入天线高后,选择截止观测角为15°,对所有的观测卫星使用后动态差分模式进行后处理,将解算结果以1 Hz频率输出。
第二部分中,河势断面一般采用8 m或16 m间隔记录,人工检查测量过程中是否漏记局部最深点和最浅点,并根据记录的声图文件对错误的水深数据进行修正。
第三部分的流程见图2。PPK计算得到的结果是频率为1 Hz的观测序列,而水深数据根据测量间隔记录,因此需要通过时间戳将两者融合。首先采用自主编程将测深数据与定位数据自动匹配,然后通过七参数转换的方式将CGCS2000经纬度、大地高的成果转换到目标坐标系统,最后输出河势断面观测成果。

图2 定位数据和测深数据的处理流程图
4 精度分析
野外测量共获取9 966个定位数据,RTK定位数据(含单点解与浮动解)、PPK定位数据的定位较差见表1,部分RTK定位垂向分量、PPK定位垂向分量与潮位数据比较见图3。
由表1可见,RTK与PPK定位结果的中位数基本处于厘米级,可以反映两者的定位结果基本一致;两者在北向、东向和垂向较差的最大、最小值都超过1 m,主要原因是实时记录的三维位置数据在丢失差分数据链接时,定位精度衰减较为严重,导致统计精度明显偏低。由图3可见,RTK定位的垂向数据与验潮站数据存在较大偏差,而PPK解算的垂向数据与验潮站数据的一致性较好,能满足RTK三维水深测量需要。

表1 RTK与PPK定位结果较差表 单位:m
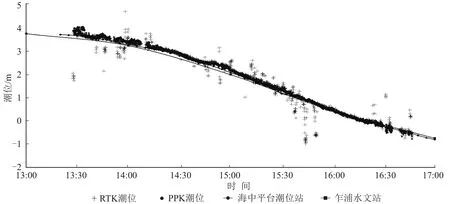
图3 RTK、PPK与验潮站潮位对比图
5 结 语
本文主要研究PPK技术在杭州湾跨海大桥河势断面观测中的应用。文中介绍了载波相位差分的工作原理、PPK水深测量的作业过程,并通过实测数据对精度进行分析。结果表明,PPK技术在宽阔河口区域能较好解决RTK差分信号数据链接丢失问题,可应用于杭州湾跨海大桥断面监测工作中。
